
Hvis du noen gang har hatt gleden av å demontere en gammel skriver for å spare elektronisk komponenter, kan du støte på mange sylindriske mystiske motorer med 4 eller flere ledninger som stikker ut fra sidene. Hørte du den typiske brusen til en stasjonær 3D-skriver eller den buggy elektromekaniske symfonien til disker på en CD-stasjon? I så fall blir du møtt med en trinnmotor!
Trinnmotorer gjør at den elektromekaniske verden roterer (med høyere dreiemoment!), Men i motsetning til en vanlig DC-motor, krever kontroll av en trinnmotor litt mer enn strømmen gjennom to ledninger. Denne artikkelen vil snakke om teorien om design og drift av en trinnmotor. Så snart vi tar utgangspunkt i det grunnleggende, vil forfatteren av denne guiden vise hvordan du bygger enkle kretsløp for å kontrollere trinnmotorer, og deretter hvordan du bruker spesielle drivermikrokretser.
Trinn 1: Hva gjør en motor til en trinnmotor?
Hvem trenger kanskje mer enn to ledninger og en H-bro? Hvorfor? I motsetning til vanlige DC-børstemotorer bygget for maksimal omdreining (eller kV for RC), er trinnmotorer børsteløse motorer designet for høyt dreiemoment (senere lavere hastighet) og mer nøyaktig rotasjonsbevegelse. Mens en typisk likestrømsmotor er ypperlig for å rotere propellen med høy hastighet for å oppnå maksimal trekkraft, er en trinnmotor bedre for å rulle et ark papir synkronisert med blekkpatronmekanismen inne i skriveren eller for å rotere den lineære skinnenakselen nøye i en CNC-mølle.
Innvendig er trinnmotorer mer komplekse enn en enkel likestrømsmotor, med flere spoler rundt kjernen med permanente magneter, men med denne ekstra kompleksiteten er mer kontroll gitt. På grunn av den forsiktige anordningen av spolene som er innebygd i statoren, kan trinnmotorens rotor rotere med et gitt trinn, endre polariteten mellom spolene og skifte polaritet i samsvar med det etablerte tenningsskjemaet. Trinnmotorer er ikke alle laget på samme måte, og for deres interne utførelse kreves unike (men grunnleggende) ordninger. Vi vil diskutere de vanligste typene trinnmotorer i neste trinn.
Trinn 2: Typer trinnmotorer
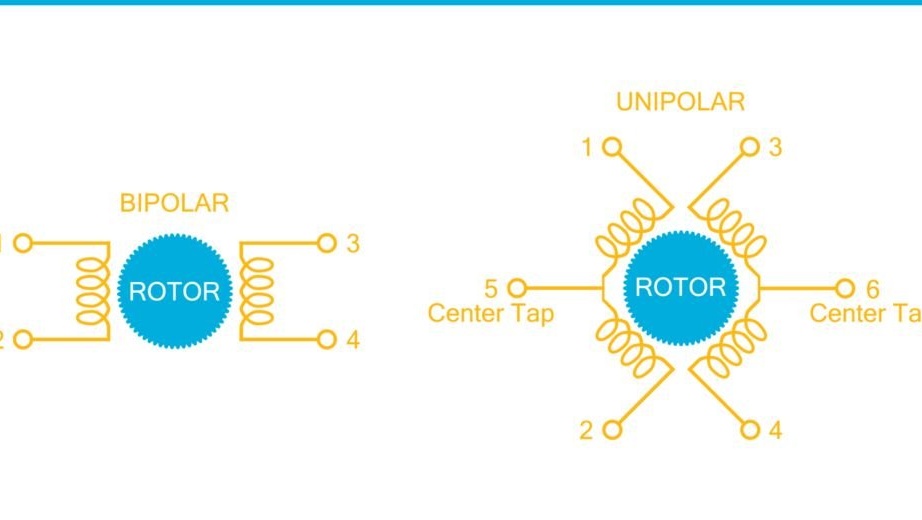
Det er flere forskjellige utførelser av trinnmotorer. Disse inkluderer unipolar, bipolar, universell og variabel motstand. Vi vil diskutere design og drift av bipolare og unipolare motorer, da dette er den vanligste typen motor.
Unipolar motor
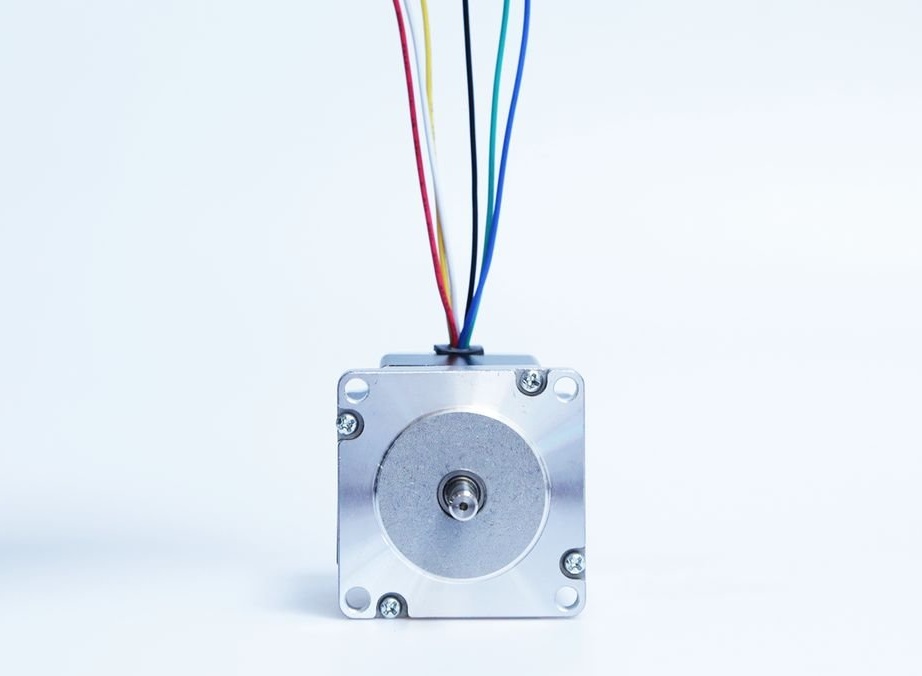
Unipolare motorer har vanligvis fem, seks eller åtte ledninger som kommer fra basen, og en spole per fase. Når det gjelder en femtrådsmotor, er den femte ledningen de tilkoblede sentrale kranene til parene av spolene. I en seks-trådsmotor har hvert spolepar hvert sitt sentrale trykk. I en åttetrådsmotor er hvert spolepar helt adskilt fra de andre, noe som gjør at den kan kobles til i forskjellige konfigurasjoner. Disse ekstra ledningene lar deg kjøre unipolare motorer direkte fra en ekstern kontroller med enkle transistorer for å kontrollere hver spole separat. En tenningskrets som hver spole kjøres i, bestemmer rotasjonsretningen til motorakselen. Gitt at bare en spole leveres om gangen, vil dessverre holdemomentet til en unipolar motor alltid være mindre enn det for en bipolar motor av samme størrelse. Ved å omgå de sentrale kranene til en unipolar motor, kan den nå fungere som en bipolar motor, men dette vil kreve en mer kompleks kontrollordning. I det fjerde trinnet i denne artikkelen vil vi kjøre en unipolar motor, som skal tydeliggjøre noen av konseptene presentert ovenfor.
Bipolar motor
Bipolare motorer har vanligvis fire ledninger og er mer holdbare enn en unipolar motor av sammenlignende størrelse, men siden vi bare har en spole per fase, må vi vri strømmen gjennom spolene for å gå ett skritt. Vårt behov for å endre strømmen betyr at vi ikke lenger vil kunne kontrollere spolene direkte med en enkelt transistor, i stedet for en komplett h-brokrets. Å bygge riktig h-bro er kjedelig (for ikke å nevne to!), Så vi vil bruke en dedikert bipolar motorfører (se trinn 5).
Trinn 3: Forstå trinnmotorspesifikasjoner
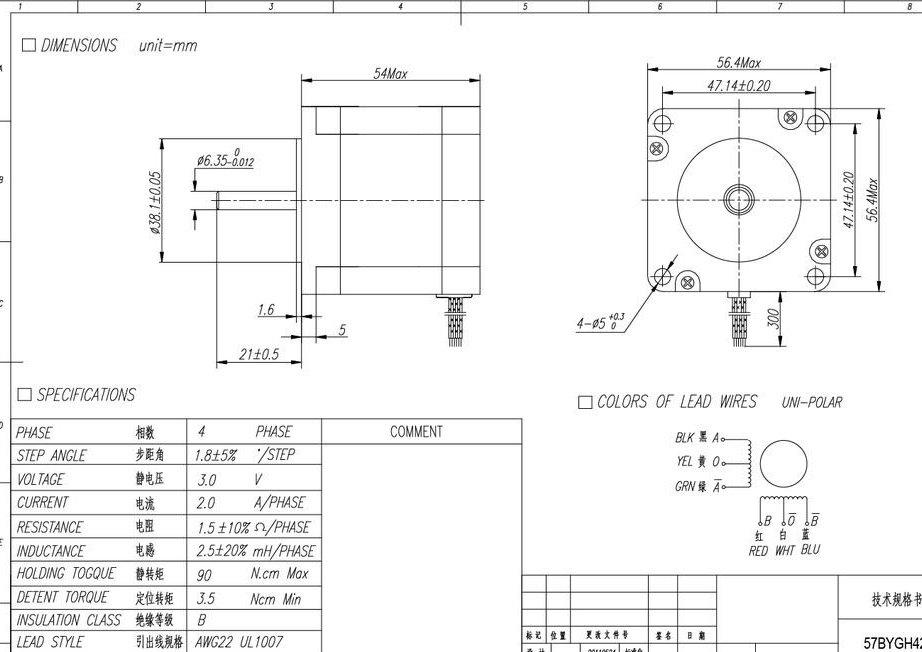
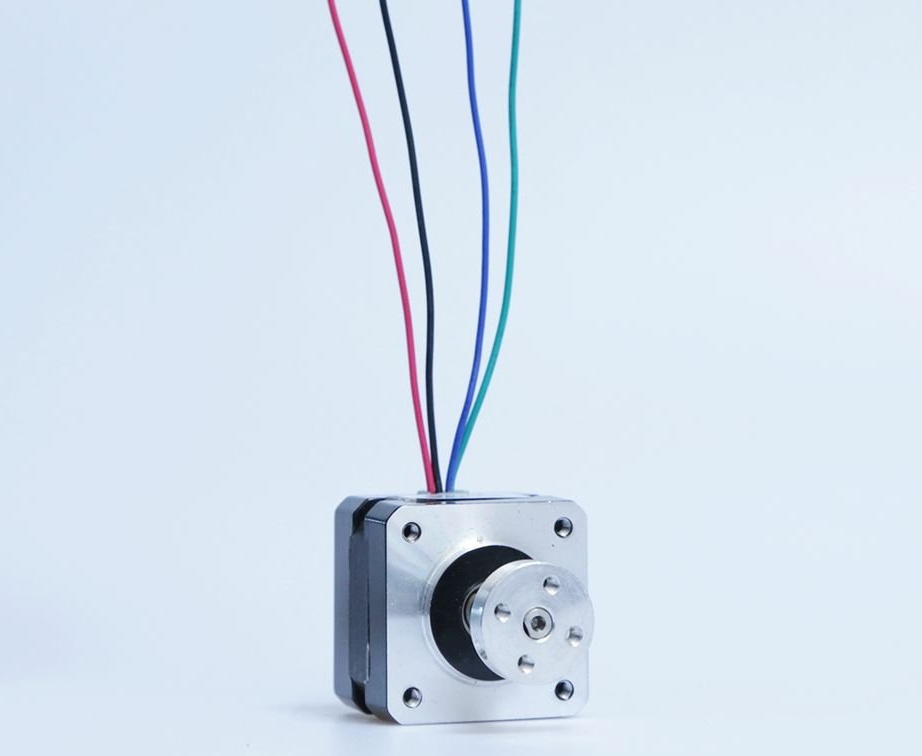
La oss snakke om hvordan du bestemmer motorspesifikasjoner. Hvis du har kommet over en firkantet motor med en spesifikk tredelt montering (se figur tre), er det mest sannsynlig en NEMA-motor. The National Association of Electrical Produsenter har en spesifikk standard for motorspesifikasjoner som bruker en enkel bokstavkode for å bestemme diameteren på fronten på motoren, type montering, lengde, fasestrøm, driftstemperatur, fasespenning, revolusjonstrinn og ledninger.
Les motorpass
For neste trinn vil denne unipolare motoren brukes. Over er en datatabell. Og selv om det er kortfattet, gir det oss alt vi trenger for riktig drift. La oss se på hva som er på listen:
Fase: Dette er en fire-faset unipolar motor. Den interne motoren kan ha et hvilket som helst antall virkelige spoler, men i dette tilfellet er de gruppert i fire faser, som kan styres uavhengig.
Vinkeltone: Med en omtrentlig oppløsning på 1,8 grader per trinn får vi 200 trinn per omdreining. Selv om dette er en mekanisk oppløsning, kan vi ved hjelp av mikrokrysset øke denne oppløsningen uten endringer i motoren (mer om dette i trinn 5).
Spenning: Nominell spenning på denne motoren er 3 volt. Dette er en funksjon av motorens strøm og nominelle motstand (Ohms lov V = IR, derfor 3V = 2A * 1,5 2)
Strøm: hvor mye strøm trenger denne motoren? To ampere per fase! Dette tallet vil være viktig når du velger våre krafttransistorer for den grunnleggende kontrollkretsen.
Motstand: 1,5 ohm per fase vil begrense hvilken strøm vi kan tilføre hver fase.
Induktans: 2,5 mH. Motorenes induktive natur begrenser spolens ladehastighet.
Holdemoment: dette er hvor mye faktisk kraft vi kan skape når spenning tilføres trinnmotoren.
Holdemoment: dette er det holdemomentet vi kan forvente av motoren når den ikke er spenningssatt.
Isolasjonsklasse: Klasse B er en del av NEMA-standarden og gir oss en rangering på 130 grader Celsius. Trinnmotorer er ikke veldig effektive, og det konstante forbruket av maksimal strøm betyr at de vil bli veldig varme under normal drift.
Viklingsindikatorer: ledningsdiameter 0,644 mm., Antall svinger i diameter 15,5, tverrsnitt 0,326 mm2
Oppsporing av spiralpar
Selv om motstanden til spiralviklingene kan variere fra motor til motor, hvis du har en multimeter, kan du måle motstanden på to ledninger, hvis motstanden er <10 ohm, har du sannsynligvis funnet et par! Dette er i utgangspunktet en prøvefeilprosess, men den skal fungere for de fleste motorer med mindre du har et del / spesifikasjonsnummer.
Trinn 4: Direkte kontroll av trinnmotorer
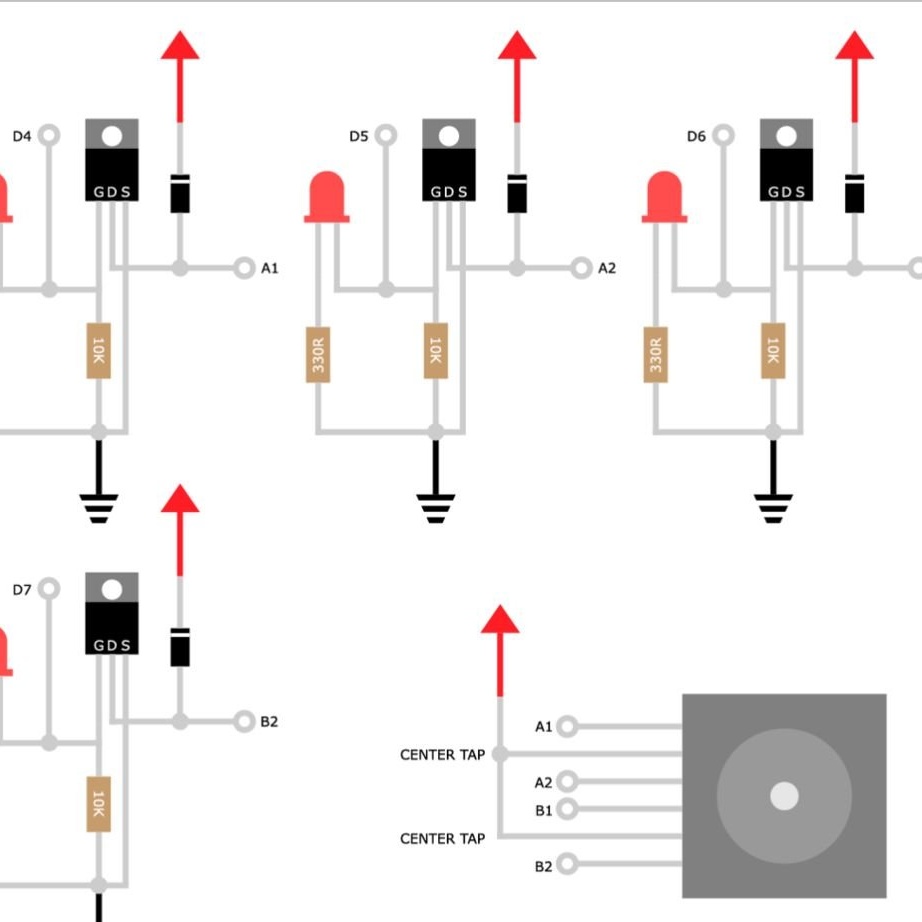
På grunn av ledningenes plassering i en unipolar motor, kan vi sekvensielt slå på spolene ved å bruke bare enkle MOSFET-effekter. Figuren over viser en enkel krets med en MOS-transistor. Denne ordningen lar deg ganske enkelt kontrollere logikknivået ved hjelp av en ekstern mikrokontroller. I dette tilfellet er den enkleste måten å bruke et Intel Edison-brett med et stilbasert lappebrett. Arduinofor å få enkel tilgang til GPIO (det vil imidlertid enhver mikro med fire GPIO-er gjøre). IRF510 N-kanals høyeffekt MOSFET brukes for denne kretsen. IRF510, som er i stand til å konsumere opptil 5,6 ampere, vil ha nok ledig kraft til å oppfylle to ampere-motorkrav. Lysdioder er ikke nødvendig, men de vil gi deg en god visuell bekreftelse av arbeidssekvensen. Det er viktig å merke seg at IRF510 må ha et logisk nivå på minst 5 V slik at den kan forbruke tilstrekkelig strøm for motoren. Motorkraften i denne kretsen vil være 3 V.
Arbeidsrekkefølge
Full kontroll av en unipolar motor med denne innstillingen er veldig enkel. For å kunne rotere motoren, må vi slå på fasene i gitt modus slik at den roterer riktig. For å rotere motoren med klokken, vil vi kontrollere fasene på følgende måte: A1, B1, A2, B2. For å rotere mot klokken, endrer vi bare retningen på sekvensen til B2, A2, B1, A1. Dette er bra for grunnleggende kontroll, men hva hvis du vil ha mer nøyaktighet og mindre arbeid? La oss snakke om å bruke en dedikert driver for å gjøre ting mye enklere!
Trinn 5: Stepper motor driver boards
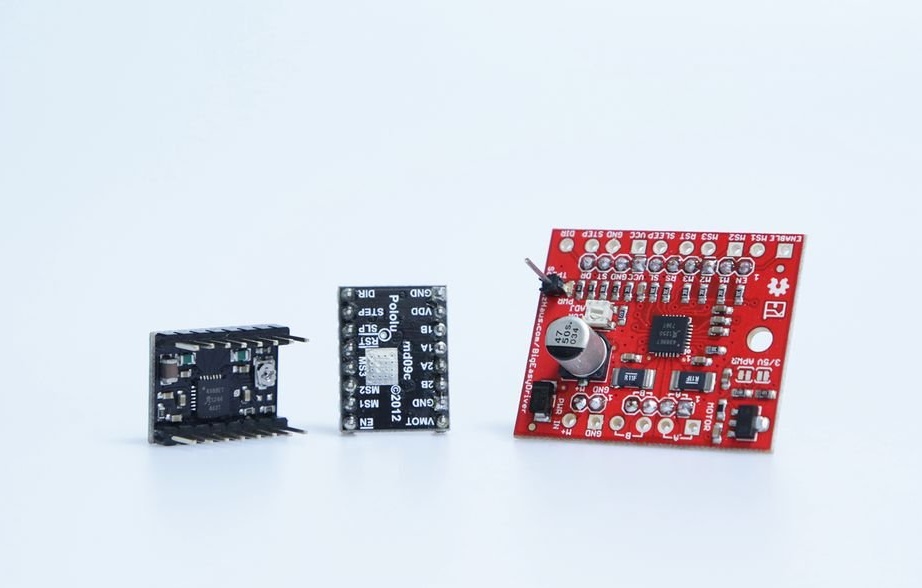
Hvis du vil begynne å kontrollere bipolare motorer (eller unipolare motorer i en bipolar konfigurasjon), må du ta et spesielt førerkontrolltavle. Bildet over viser Big Easy Driver og bærebrettet for A4988-trinnmotordriveren. Begge disse kortene er trykte kretskort for den mikrostepre topolede Allegro A4988 trinnmotordriveren, som er den desidert mest vanlige brikken for kjøring av små trinnmotorer. I tillegg til å ha de nødvendige doble broene for å kontrollere en bipolar motor, tilbyr disse brettene mange alternativer for liten, billig emballasje.
montering
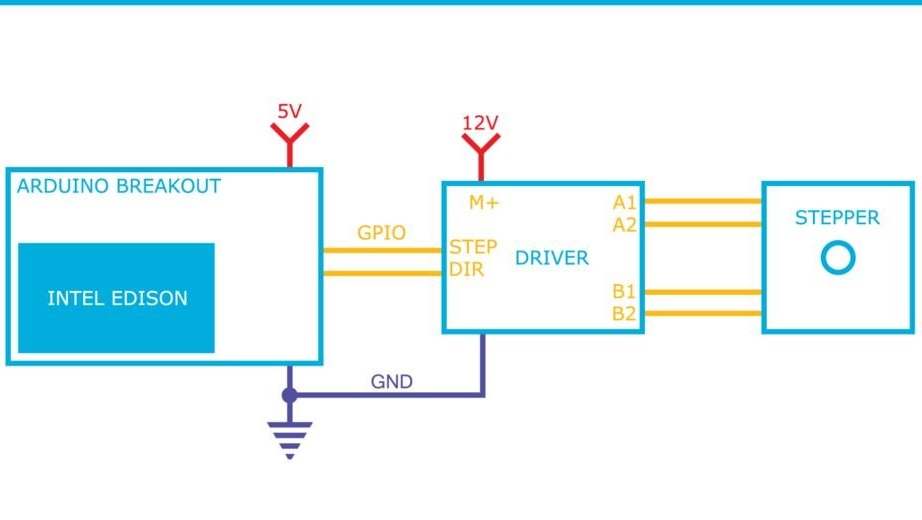
Disse universalplatene har en utrolig lav forbindelse. Du kan begynne å kontrollere motoren ved å bruke bare tre tilkoblinger (bare to GPIO-er) med hovedkontrollen: felles terreng, stigning og retning. Trinnstrinnet og retningen forblir flytende, så du må binde dem til referansespenningen med en lastmotstand. Pulsen som sendes til STEP-pinnen vil bevege motoren ett trinn i en oppløsning i samsvar med mikrostep-referansetappene. Logikknivået på DIR-pinnen bestemmer om motoren vil rotere med klokken eller mot klokken.
Microstep-motor
Avhengig av hvordan pinnene M1, M2 og M3 er installert, kan du oppnå økt motoroppløsning ved å mikrostrikke. Mikrosteppen inkluderer sending av en rekke pulser for å trekke motoren mellom den elektromagnetiske oppløsningen til de fysiske magnetene i rotoren, og gir veldig presis kontroll. A4988 kan gå fra fullt trinn til oppløsning av det sekstende trinn. Med vår 1,8 graders motor vil dette gi opptil 3200 trinn per omdreining. Snakk om de små detaljene!
Koder / biblioteker
Det kan være enkelt å koble motorer, men hva med å kontrollere dem? Sjekk ut disse ferdige kodebibliotekene for stepper motor control:
stepper - Den klassiske innebygde i Arduino IDE lar deg utføre et grunnleggende trinn og kontrollere rotasjonshastigheten.
Accel stepper - Et mye mer fullverdig bibliotek som lar deg bedre kontrollere flere motorer og gir riktig akselerasjon og retardasjon av motoren.
Intel C ++ MRAA-trinn - Et bibliotek på lavere nivå for de som vil fordype seg i styringen av den rå C ++ stepper-motoren ved hjelp av Intel Edison.
Denne kunnskapen skal være nok til at du kan forstå hvordan du jobber med trinnmotorer i den elektromekaniske verdenen, men dette er bare begynnelsen.
