

Vil du ha en kamp mellom edderkopproboter? Så studer nøye denne artikkelen, i den vil mesteren fortelle deg hvordan du lager en slik edderkopp. Og for klarhet i arbeidet hans, la oss se videoen.
Verktøy og materialer:
For edderkoppen
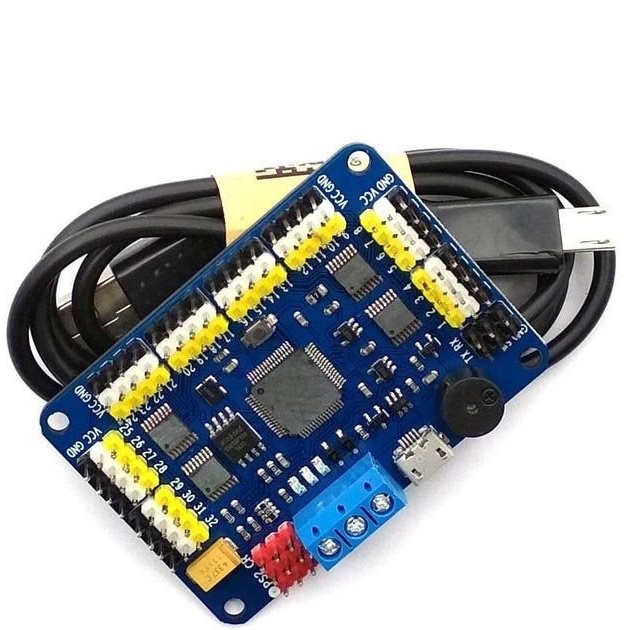
32-kanals servokontroller;
-Wemos D1 Mini-kontroller;
- MG90S Servo Drives - 18 stk;
-Ubec 6A 5V-kontroller;
- DC-DC buck converter;
- Hoppere;
-Akkumulyator;
For tårnet
-To motorer;
-Kraftmodul;
- Senke omformer;
-Servoprivod;
-3D skriver;
Limpistol;
-Kley;
- skrutrekker;
-Krepezh;
- Dobbeltsidig tape;
-Kusachki;
-Nozh;
-Nadfili;
-Plastiske baller;
Lodding tilbehør;






Trinn én: Skrive ut deler
Først må du skrive ut detaljene om kroppen og bena på en 3D-skriver. Du kan laste ned filer for utskrift på dette lenken.


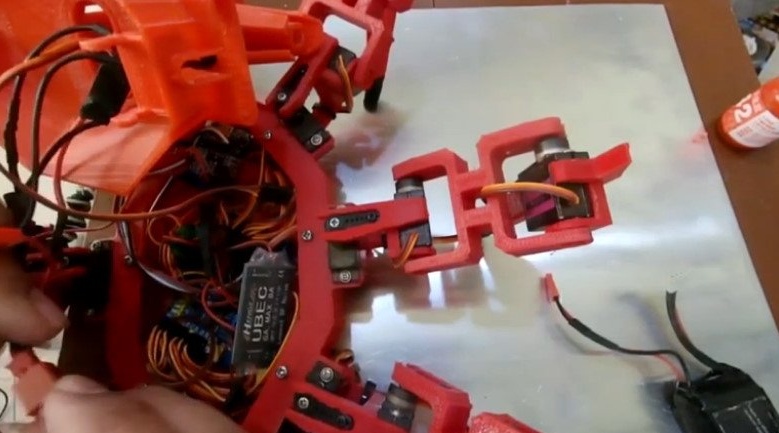
Trinn to: Bygg
Nå må du samle robopauk.
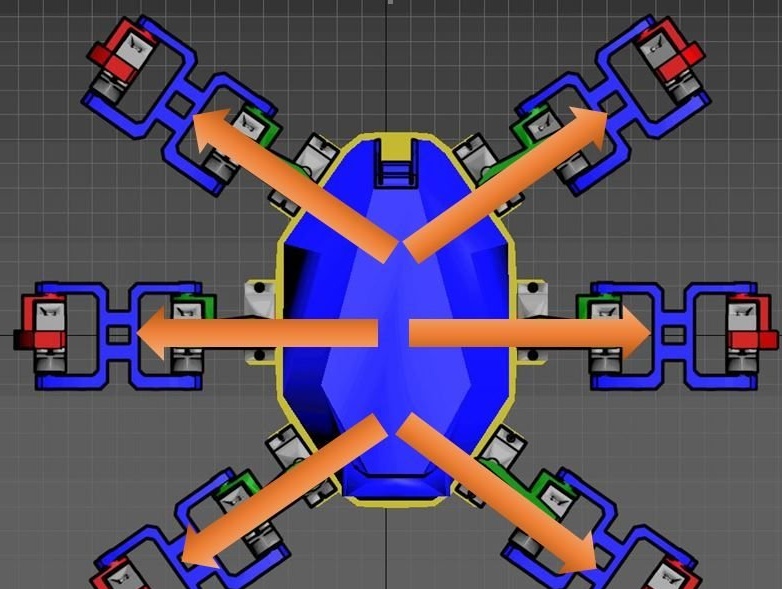
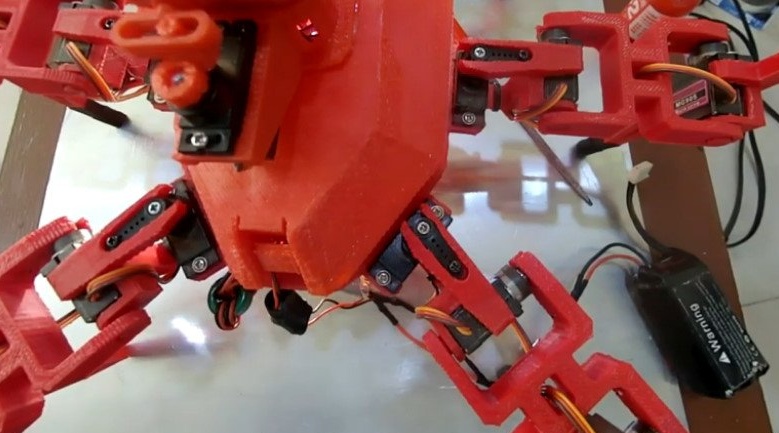
Mesteren installerer servoer på leddene på edderkoppens ben. Totalt har roboten seks ben og tre servoer på hvert ben.








Installerer servoer på chassisplattformen.




Fest de første leddene på bena til plattformens servoer.




Ledningene trekkes inn i de teknologiske hullene og kobles til kontrolleren.





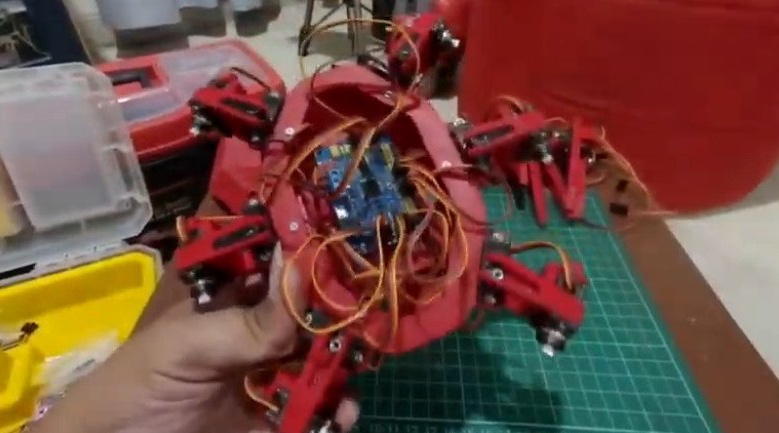
Installerer stubber.


Etabler benets andre ledd. Kobler ledninger fra servoer til kontrolleren.






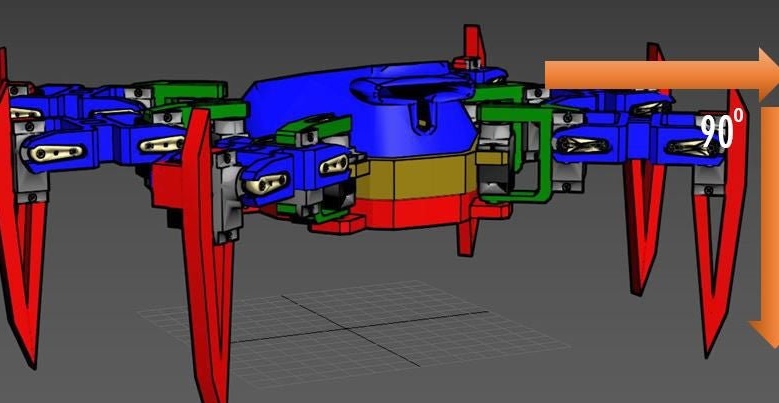
Installerer det tredje leddet. Med dette leddet vil edderkoppen støte mot overflaten når du beveger deg.


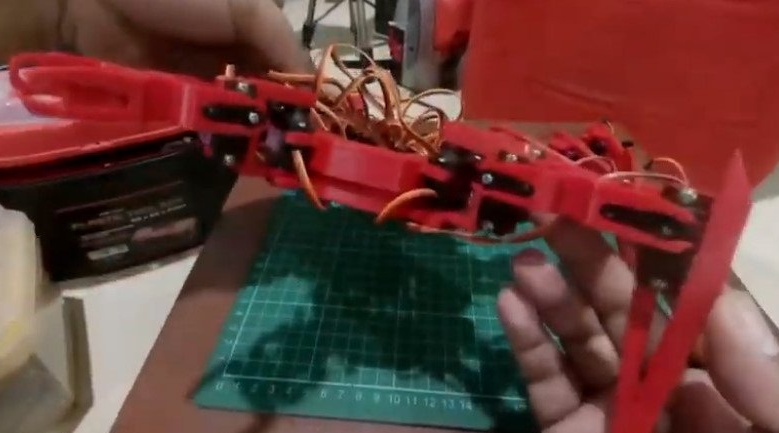

Kobler til og kontrollerer driften av hver servostasjon.



Hvis alt normalt fikser ledningene med bånd, installerer du batteriet og lukker dekslet.



Byggeprosessen kan sees i videoen.
Trinn tre: Om elektronikk
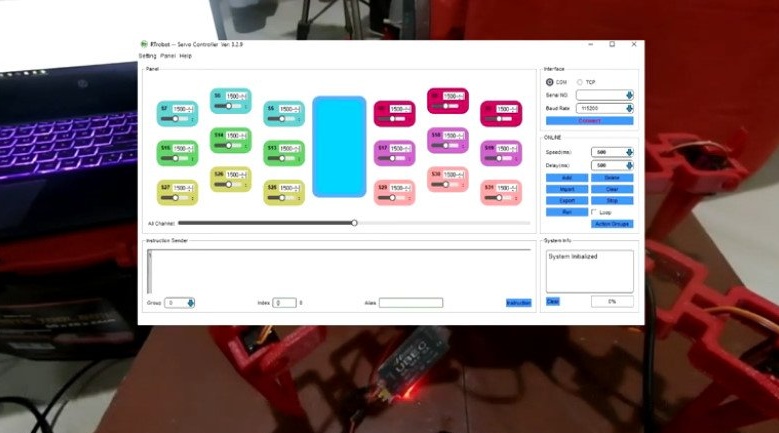
Veiviseren brukte RTrobot servokontroller for å kontrollere bevegelsene. Styringsprogram kan lastes ned her eller her.
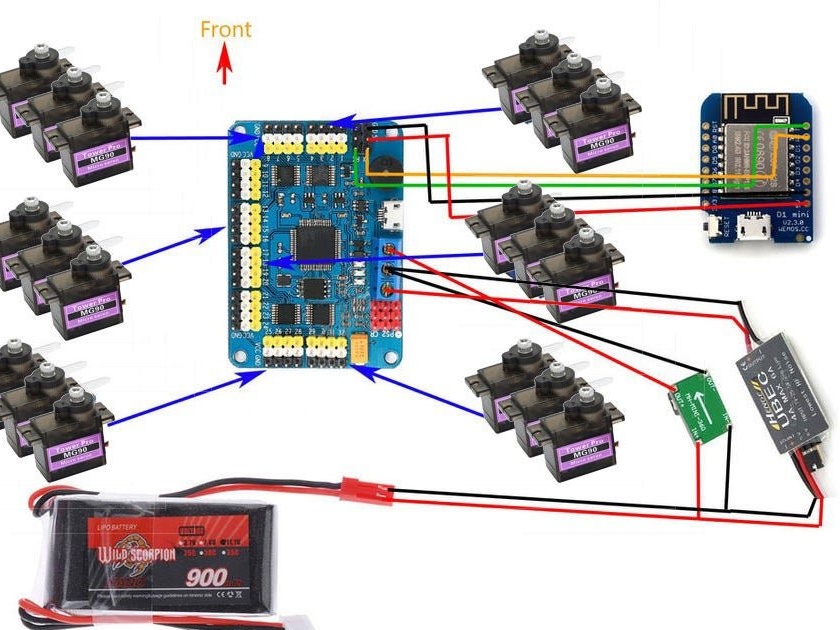
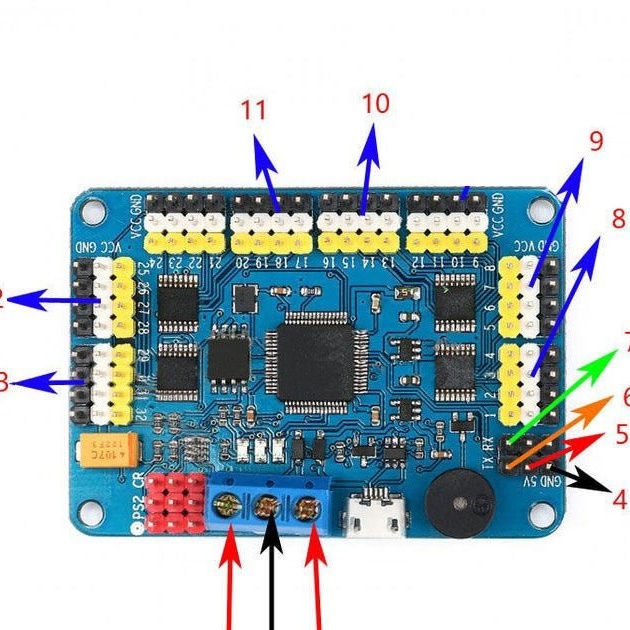
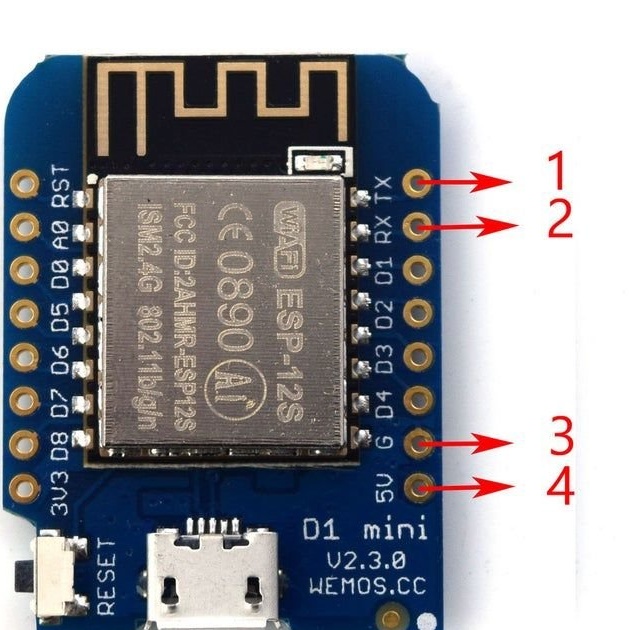
Alt henger sammen som følger:
1. 5V (+) UBEC-utgang
2. Jord fra UBEC og buck converter
3. 5 V strømforsyning (+) fra omformeren
4. på Wemos D1 mini G-pinnen
5. til Wemos 5v
6. til Wemos D1 RX
7. Wemos TX
Servo-stasjoner er koblet til pinnene 8 til 13.
Installer koden på NodeMCU. Du kan laste den ned her.
WeMos D1 mini er det minste ESP8266 Wi-Fi-kortet.
Ved å bruke wemos D1 mini som WIFI-tilgangspunkt, kan du sende en seriell kommando til servokontrolleren. Alt som trengs er bare å blinke nodeMCU-brettet med kode, og du kan koble smarttelefonen til nodeMCU AP. Gå deretter til http://192.168.4.1 med en nettleser.
Det er viktig.
Når du slår på servoen, vil alle servoer flytte seg til den opprinnelige / standardposisjonen
installer servoer så nøyaktig som mulig, som vist på figuren over eller i videoen
juster posisjonen til leddene, slå av enheten og slå den på igjen for å sikre at alle ben er i riktig posisjon
hvis leddene klamrer seg til, gni, juster posisjonen.
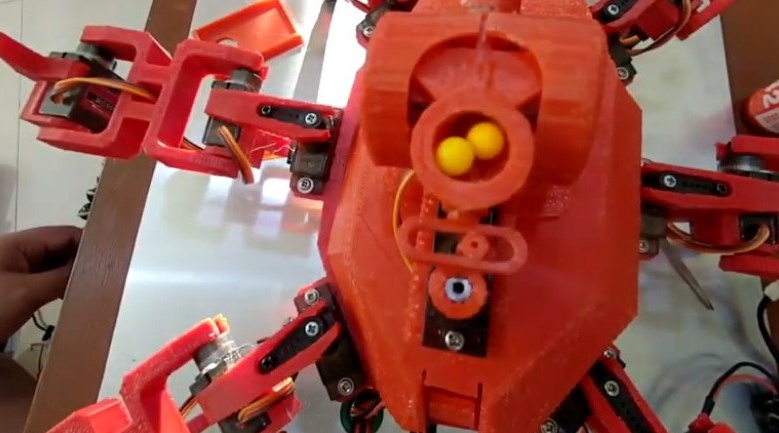
Trinn fire: Tårnet
Nå henvender vi oss til tårnet.
Først må detaljene i tårnet skrives ut. Du kan laste ned filer på dette lenken.
Så fortsetter mesteren for å sette sammen tårnet. Kretsen for å vri tårnet og koble til de elektriske delene er nedenfor.
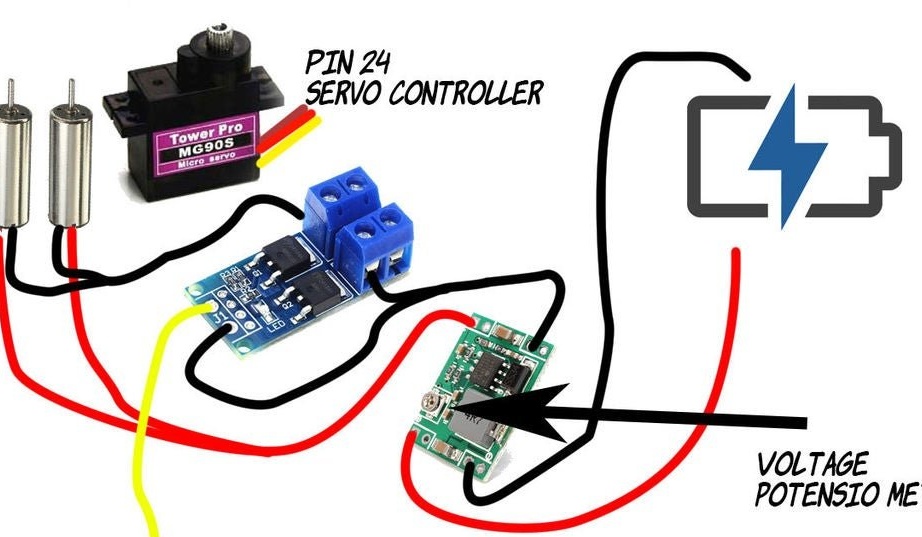
Installerer en servo på tårnet.







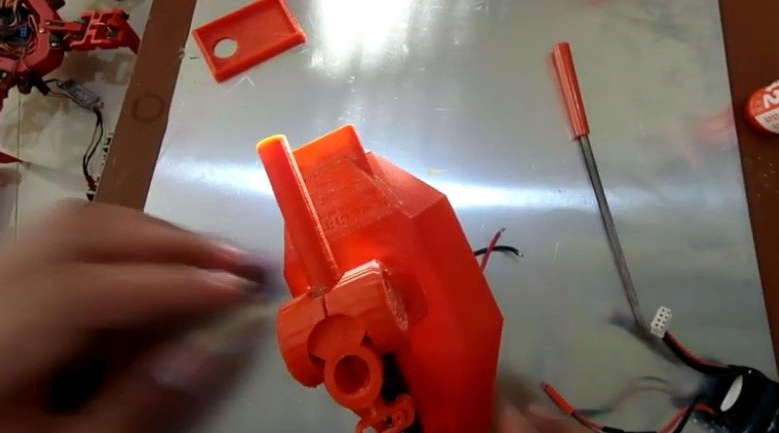
Dobbeltsidig tape fester seg til rullene.


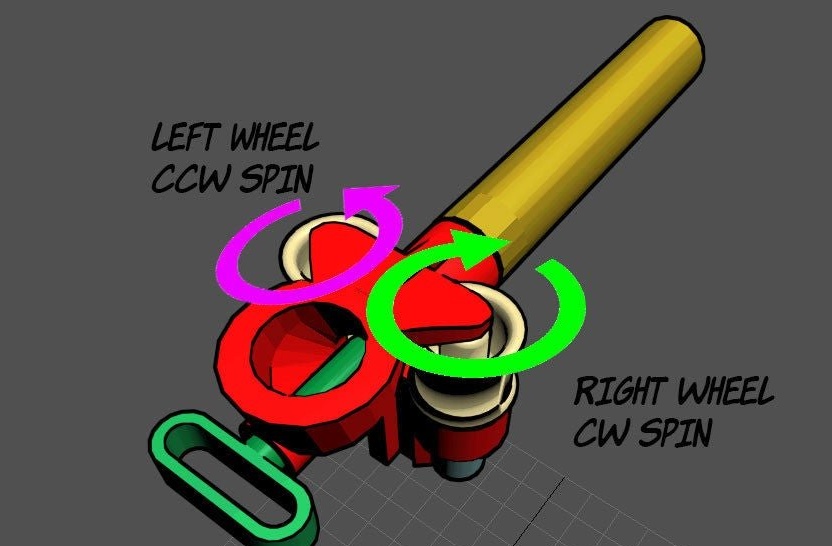
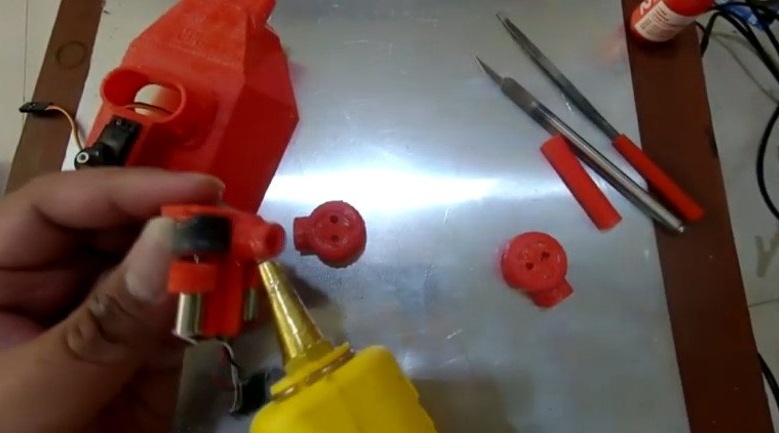
Samler en pistol. Installerer motorer i en holder. Monterer ruller på motorakslene.







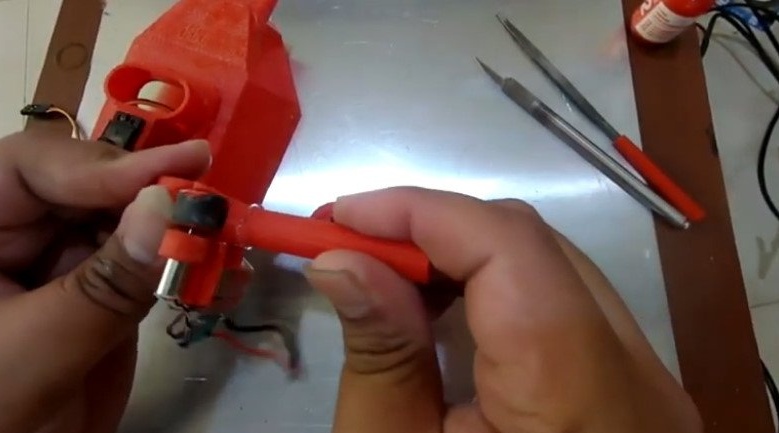

Kobler sammen ledninger og samler tårnet.




Laster skjell og sjekker driften av pistolen. Mekanismen kan justeres ved å bevege holderen på servo akselen.


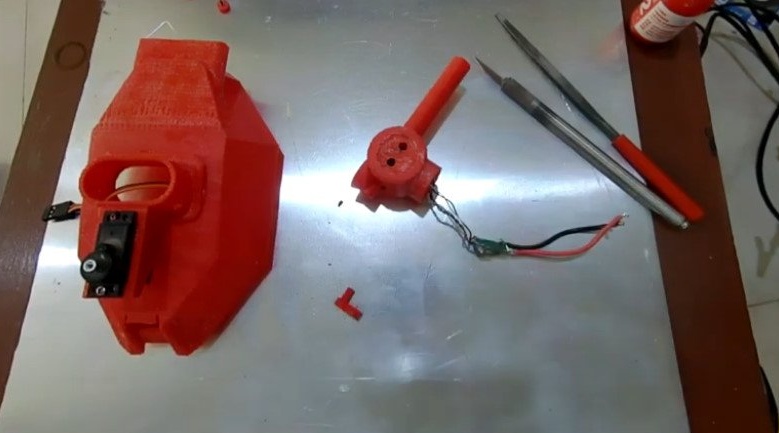
Det gjør den endelige tilkoblingen, montering og inspeksjon.
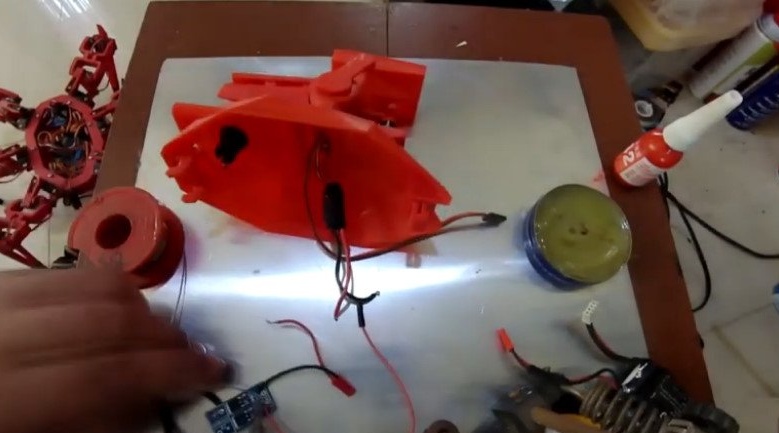




Video med tårnets montering kan sees nedenfor.
Alt er klart. Samle en slik robopauk til, så kan du arrangere kamper.
