Gangarten hans ligner veldig på en ekte kakerlakk. Når du går, svinger det litt å trygge framover. Kakerlakken har et minimum av komplekse deler og er veldig enkel å produsere.
1.Videotest
Videoen viser en mekanisk kakerlakk fra forskjellige vinkler under drift og bevegelse.
2. Kjennetegn og funksjoner.
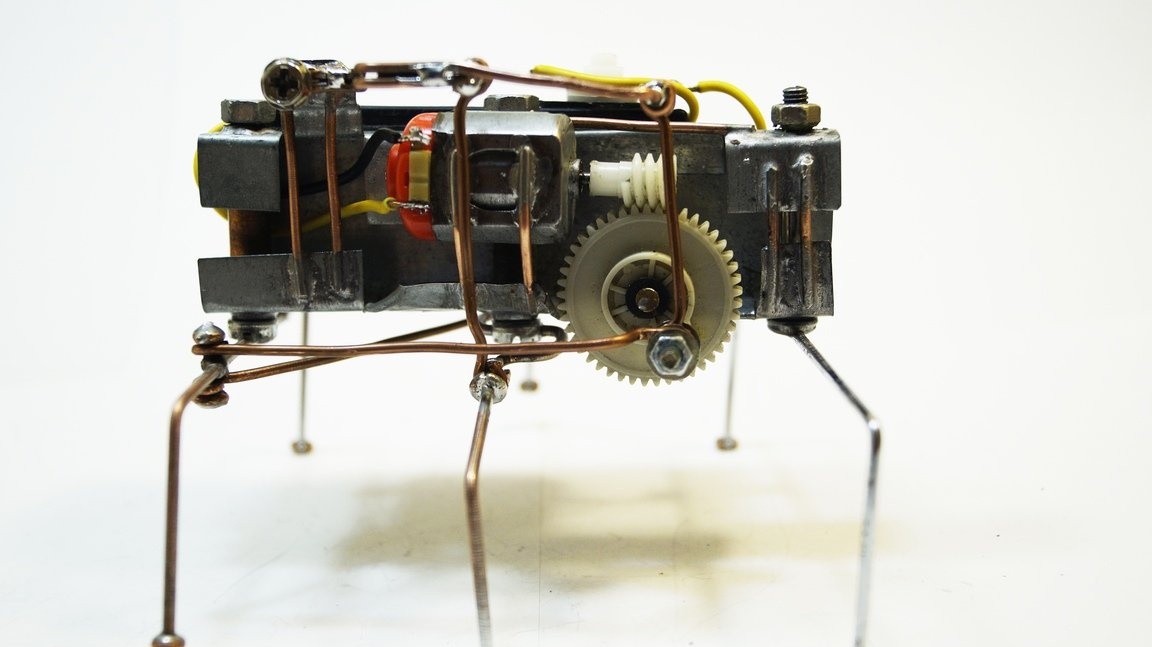
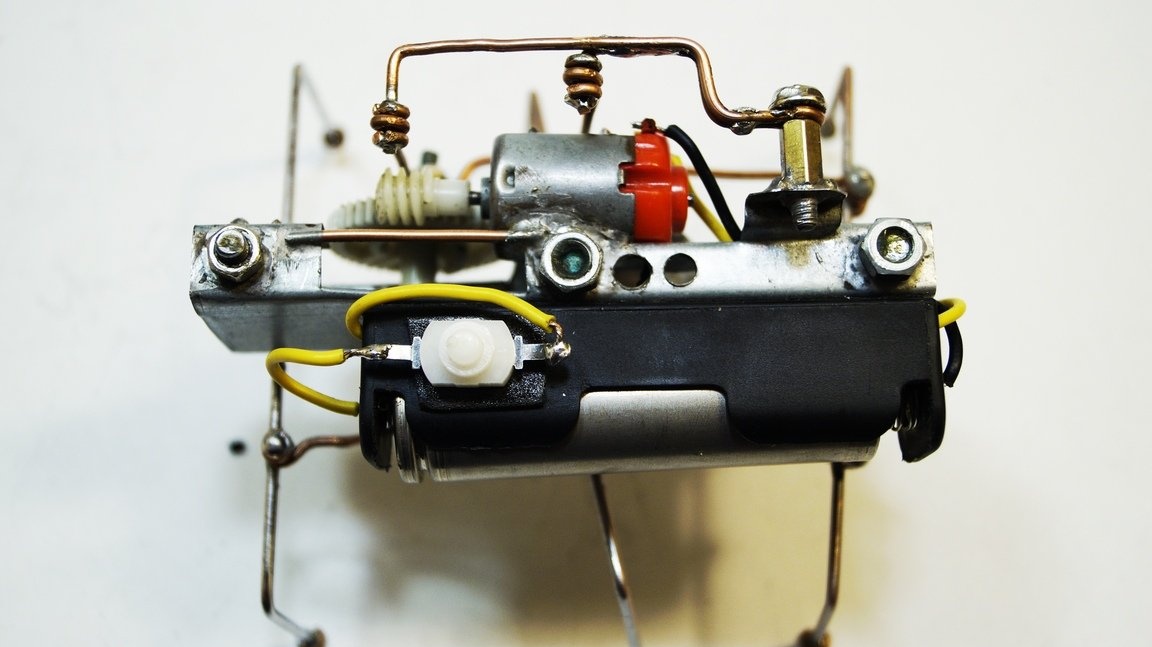
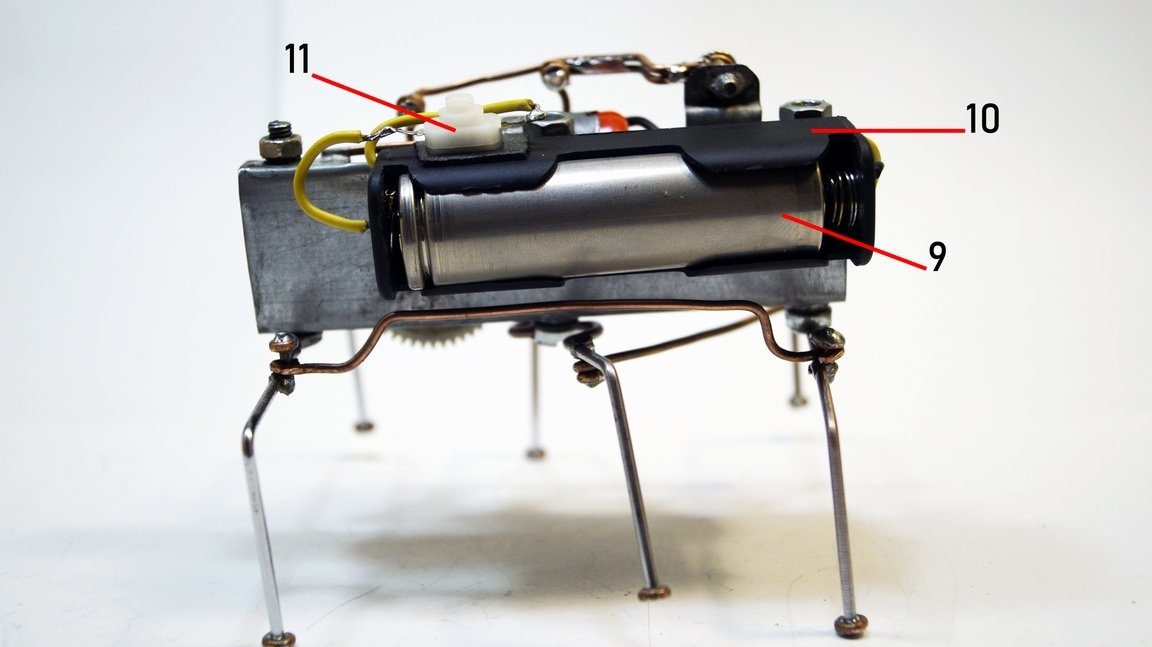
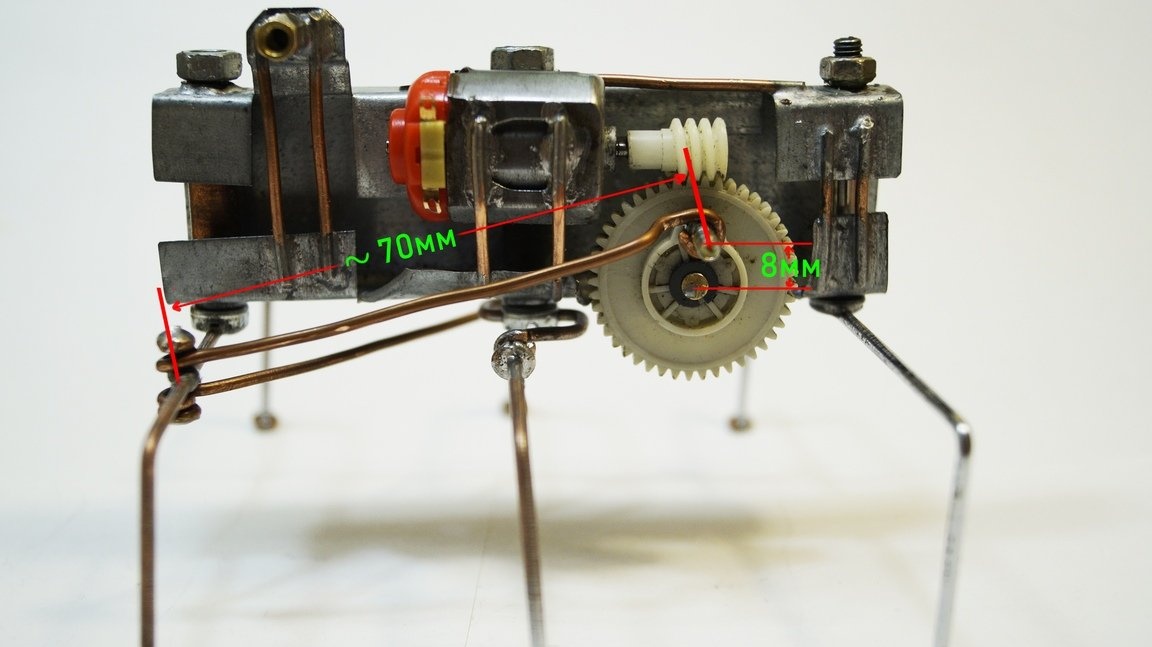
På et bilde 1. Den mekaniske kakerlakken er vist, sett fra siden. På et bilde 2. Den øvre visningen vises.
Foto 1.
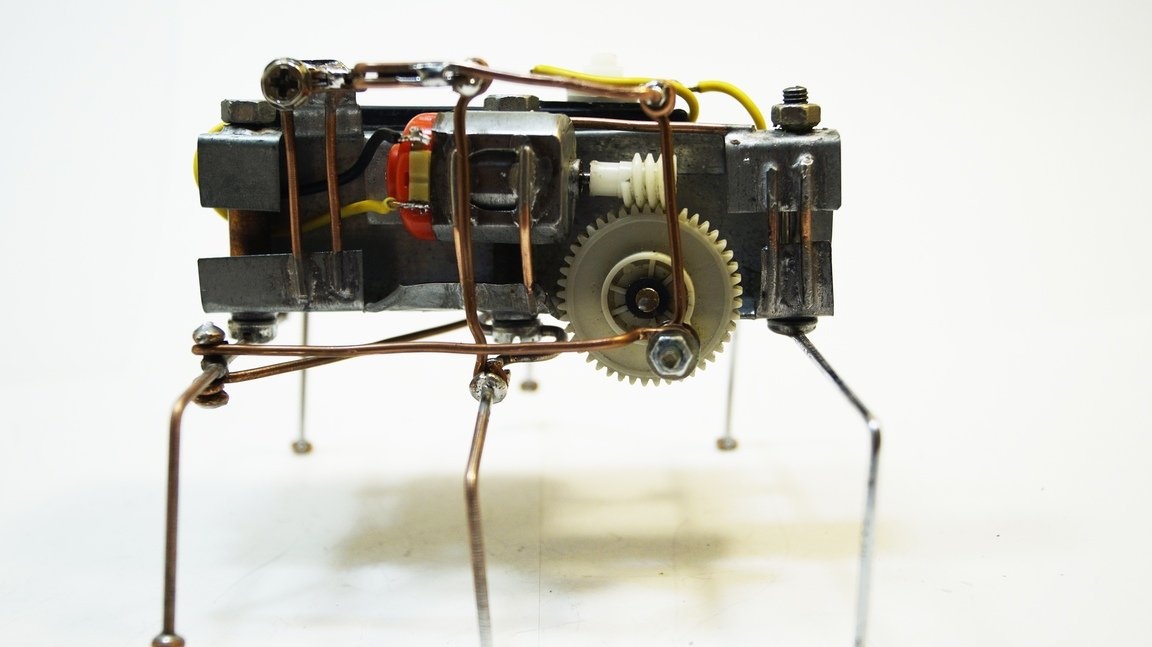
Foto 2.
KONSTRUKSJON. Som ramme ble profilen ppn-2 30X20 brukt. Motoren og andre skjøter ble montert ved lodding. Potene til en kakerlakk er festet med M6-bolter. Av / på-knappen og batterirommet er limt på dobbeltsidig tape. Som trekkraft for å drive bena på en kakerlakk ble det brukt en kobberkabel med en seksjon på 2,5 mm.
MOTOR OG KRANER. Motor og veivakse er loddet til rammen på POS-61, loddsyre ZnCl (sinkklorid). For å øke dreiemomentet og redusere størrelsen ble det brukt et ormutstyr.
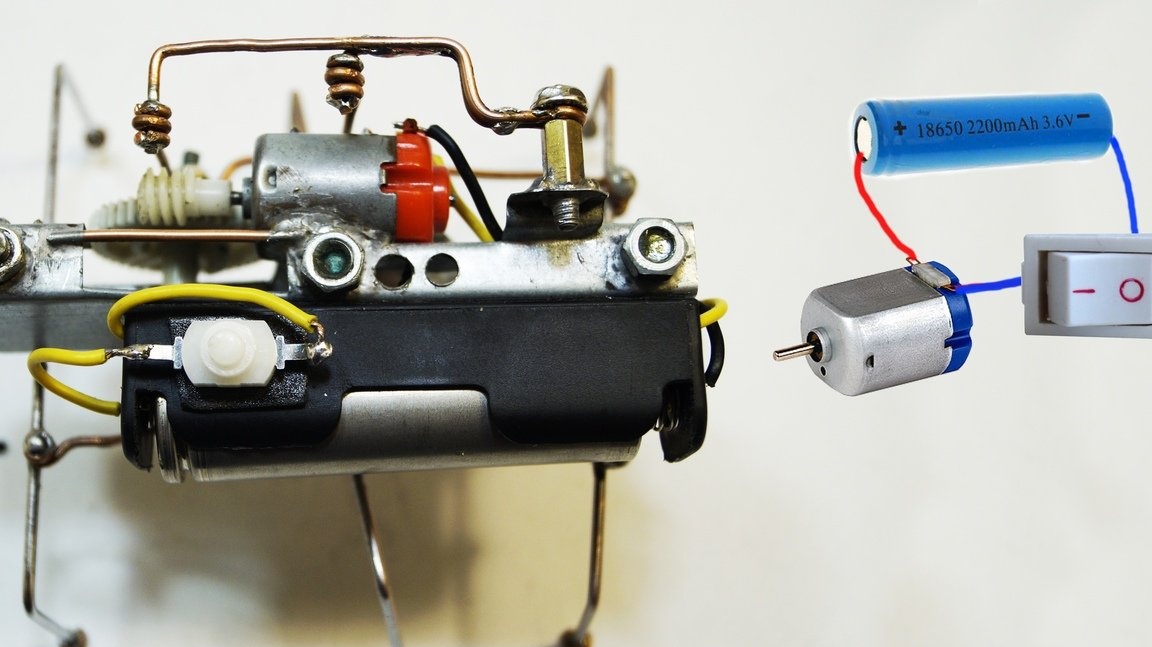
POWER. Et batteri fra 18650 ble brukt som robotens kraft. Kilden er 3,7V.
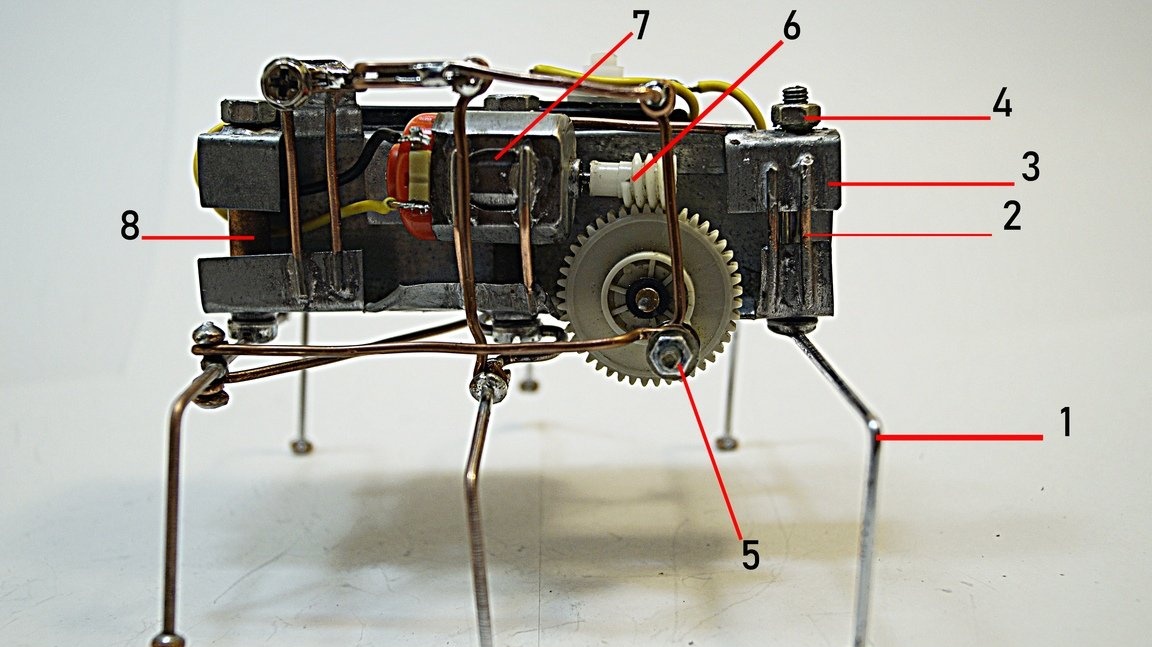
ROBOT DESIGN DETALJER
1. Poter av en kakerlakk.
2. Avstiveren.
3. Rammen.
4. Aksen til labbene til en kakerlakk.
5. Veivmekanisme.
6. Ormekjør.
7. Elektrisk motor F130 5 V.
8. Hakkeaksen til kakerlakkene.
9. Batteritype 18650, 3,7 V.
10. Batterirom.
11. Av / på-knapp.
3. Prinsippet om arbeid.
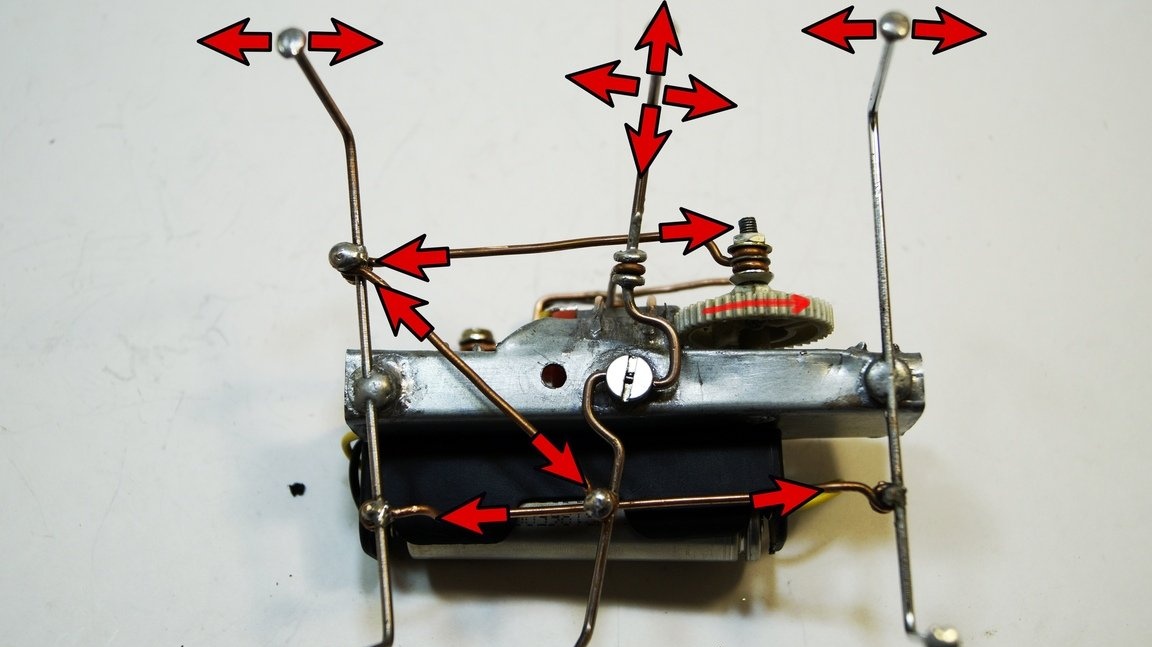
På et bilde 3. 4. Prinsippet om arbeid med mekaniske deler av en kakerlakk er vist. Det er verdt å huske at robotens for- og bakben beveger seg horisontalt, og mellombenene beveger seg loddrett og horisontalt.
Kraft tilføres den elektriske motoren gjennom nøkkelen, motoren roterer veivmekanismen. Veivben driver henholdsvis forpoten gjennom trekkraft fra forpoten, skyven skyver bakbenet (de beveger seg synkront). Det midtre labbparet er koblet til det første paret, på tvers (de beveger seg i antifase).
For å bevege det midtre labbet loddrett er det montert en spak over motoren, som settes i bevegelse fra veivmekanismen.
Foto.3
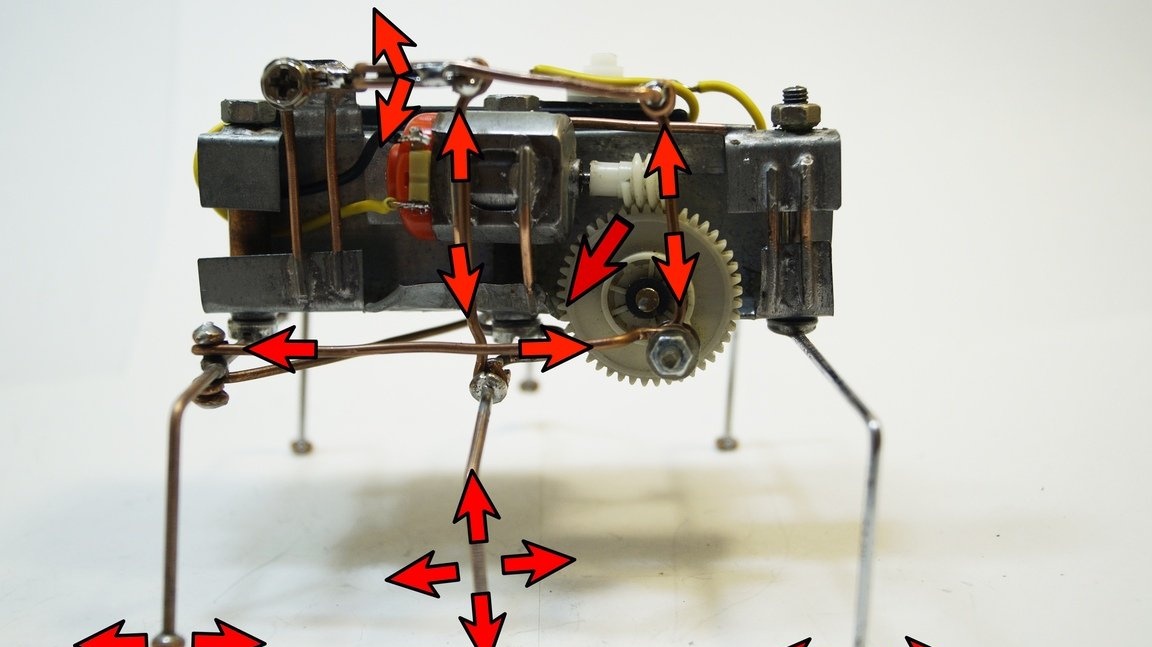
Foto.4
4. Materialer og verktøy.
1. Loddejern 50W.
2. Batterirom.
3.Prysoy POS-61.
4. En kobbertråd med et snitt på 2,5 mm.
5. Loddsyre ZnCl (sinkklorid)
6. Elektrisk motor F130 5V.
7. Saks for metall.
8. Ormekjør.
9. Tenger.
10. Stålrør, diameter 80mm.
11. Oppladbart batteri 18650.
12.Profile PPN-2 30X20.
Og også: (strømknapp, dobbeltsidig tape, monteringsledning)

5. Monteringsanvisning.
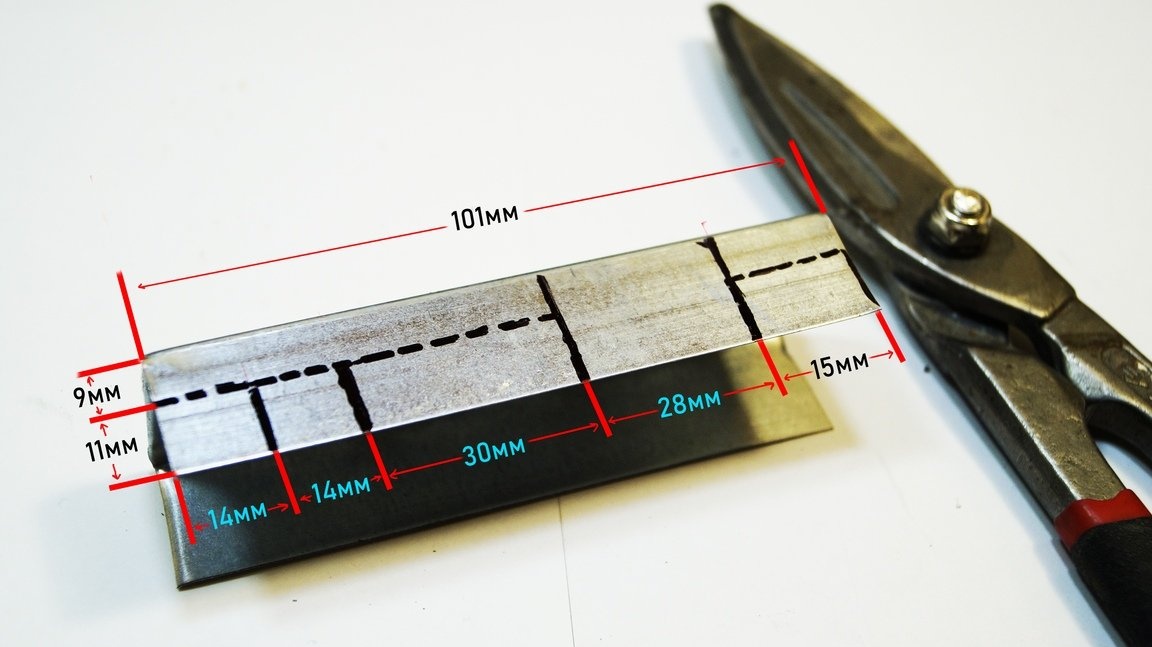
1. Å lage en kakerlakkramme.
Tegn markeringen på profilen som angitt i Foto 5.
Foto 5.
Ved bruk av saks for metall kutter vi og bøyer arbeidsstykket med tang som vist på bilde 6. Merk den nedre delen som angitt på bilde 6. Bøy profilen med tang som på foto 7.
Foto 6.
Foto 7.
2. Elektrisk motor og veivakse.
Neste trinn er å lodde den elektriske motoren til rammen. Motoren før lodding må demonteres. Vi oversvømmer motorhuset og rammen med et loddejern Photo 8.
Vi lodder kroppen til den elektriske motoren og rammen sammen, varmer delene godt med et loddejern, presser dem mot hverandre Foto 9. !!! VÆR NØYE, DETALJER VARME MYE VARME !!!
Bilde 9.
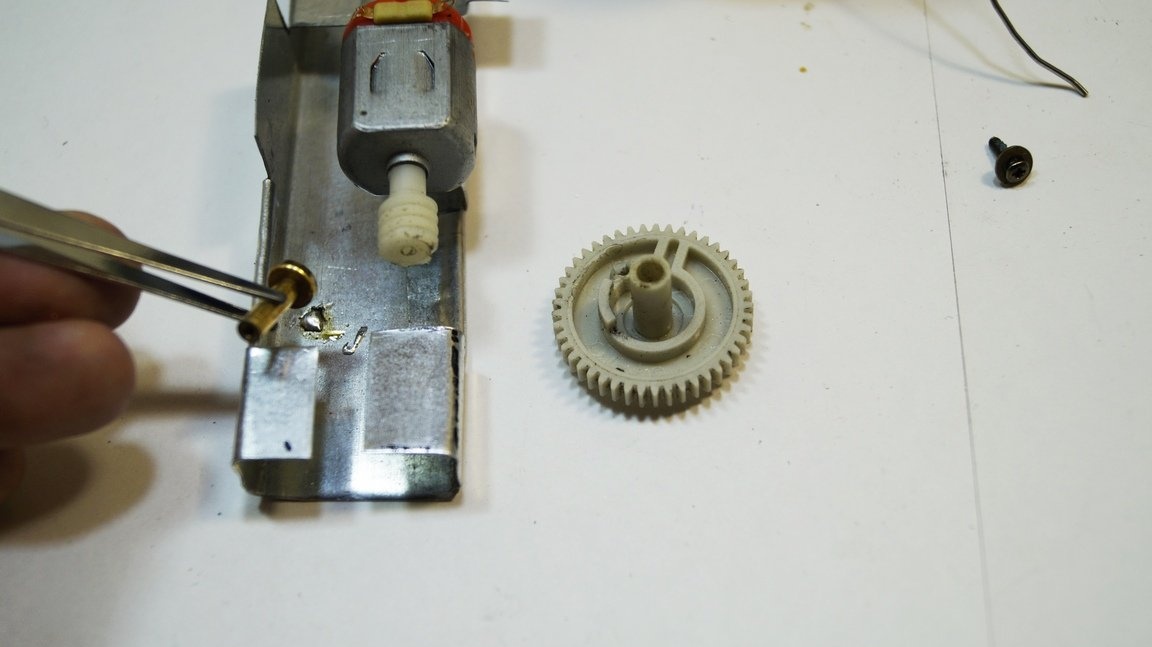
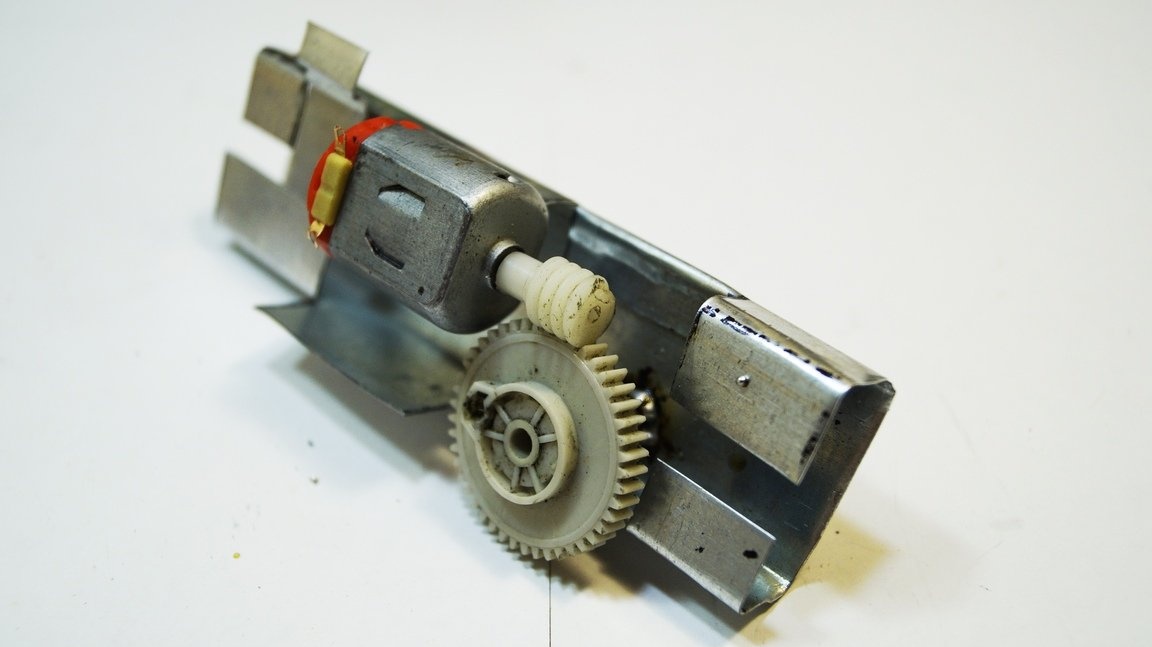
Å sette den elektriske motoren tilbake. Vi lodder veivaksen på plass, dette gjøres eksperimentelt. Ormutstyret skal være godt montert sammen, tannhjulene skal ikke være skjevt. Foto 10.11.
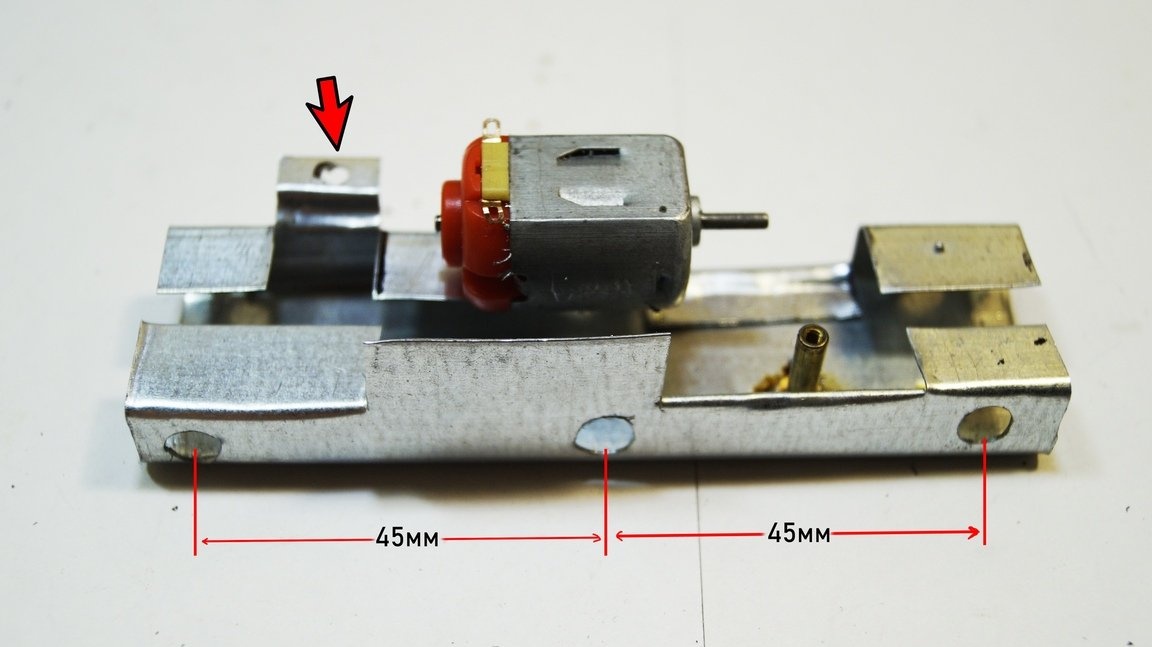
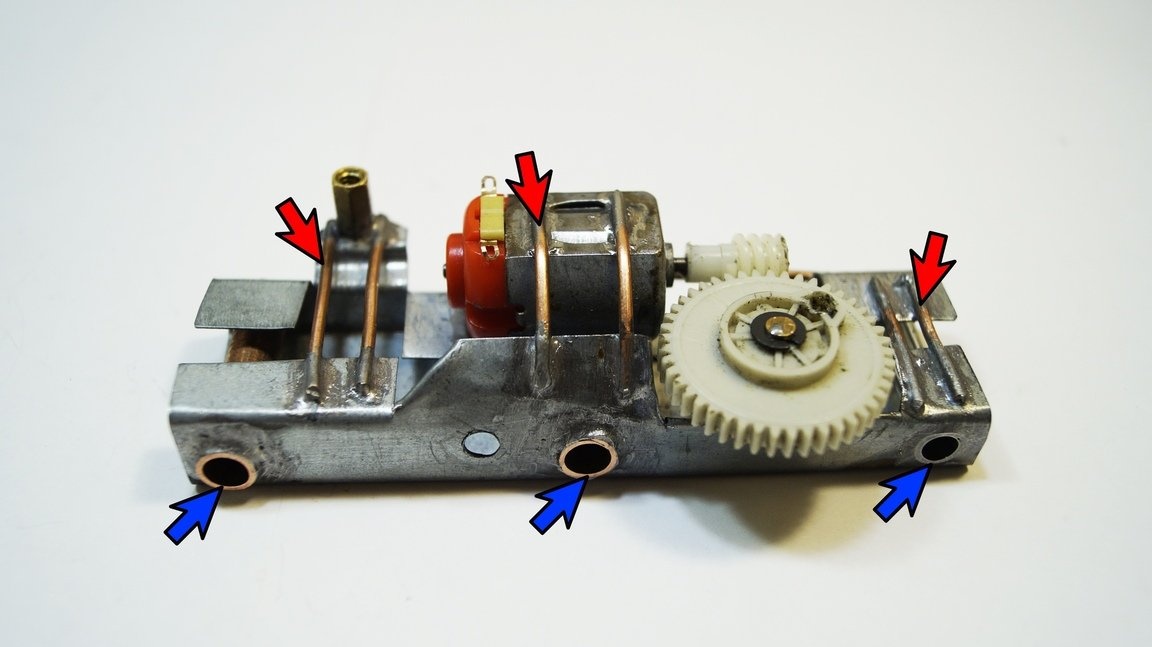
3. Hull for bena på en kakerlakk.
For å feste kakerlakkene til rammen, må du bore hull med en 8 mm bor. Vi borer et hull i øret bak den elektriske motoren med en 3,2 mm bor
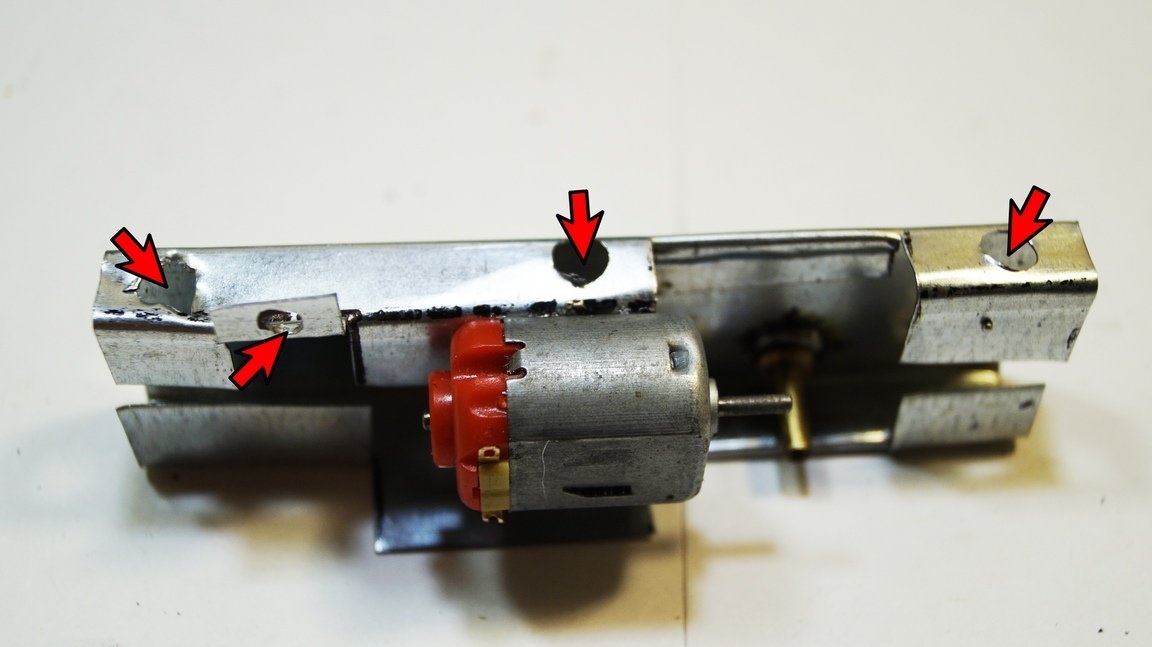
Vi lodder også en mutter i øret bak elmotoren. Spaken som er ansvarlig for å løfte de midtre potene langs den vertikale aksen vil være festet til denne mutteren
For å styrke rammens utforming ble avstivninger loddet med en 2,5 mm kobbertråd.
8 mm gjennomføringer ble også loddet til festepunktene til kakerlakkene Foto 15.
4. Poter av en kakerlakk.
En metalltråd med en diameter på 3 mm ble brukt som kakerlakk poter, den er loddet til hodet på M6-bolt Photo 16. Det midterste par kakerlakkpotene er laget på en annen måte, det bores et hull i bolthodet langs diameteren på ledningen. Tråden er bøyd i form av bokstaven “S”, dette gjør at kakerlakkens ben kan bevege seg loddrett.
Foto 16.
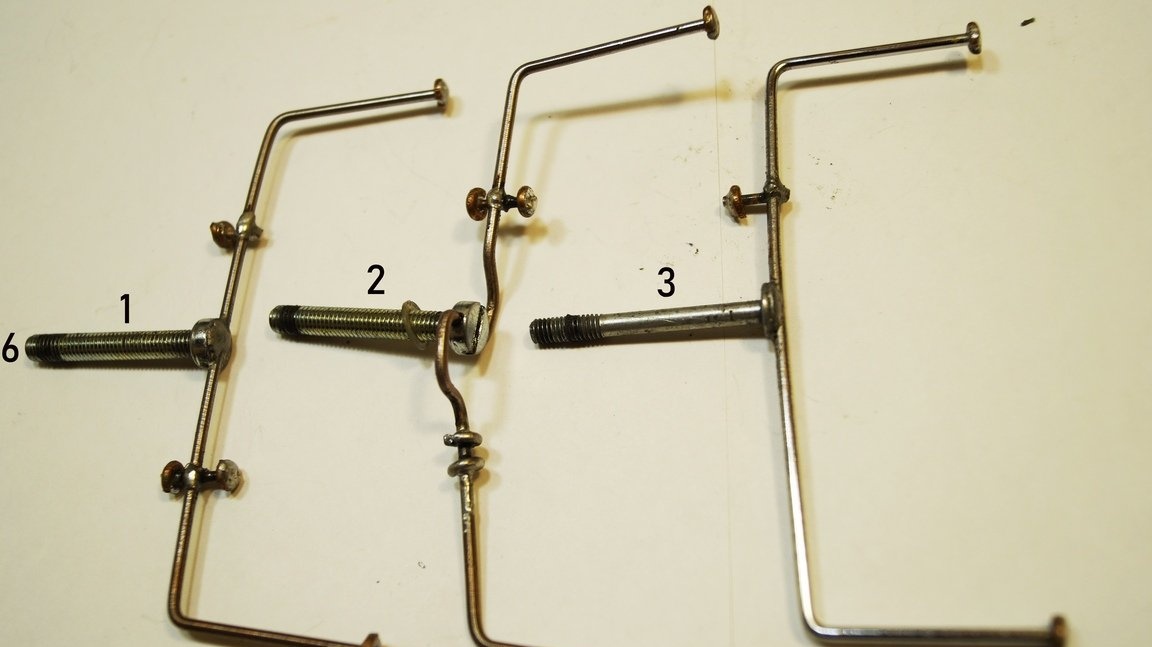
Foto 17.

For festing av stengene loddes en kobbertråd med en 2,5 mm lang seksjon 12 mm lang til kakerlakkens poter, kobberringer er loddet til endene. Stengene er laget av kobbertråd med et tverrsnitt på 2,5 mm, dimensjonene er omtrentlige, det anbefales å bøye ledningen slik at det i fremtiden er mulighet for justering langs lengden av Photo 18.
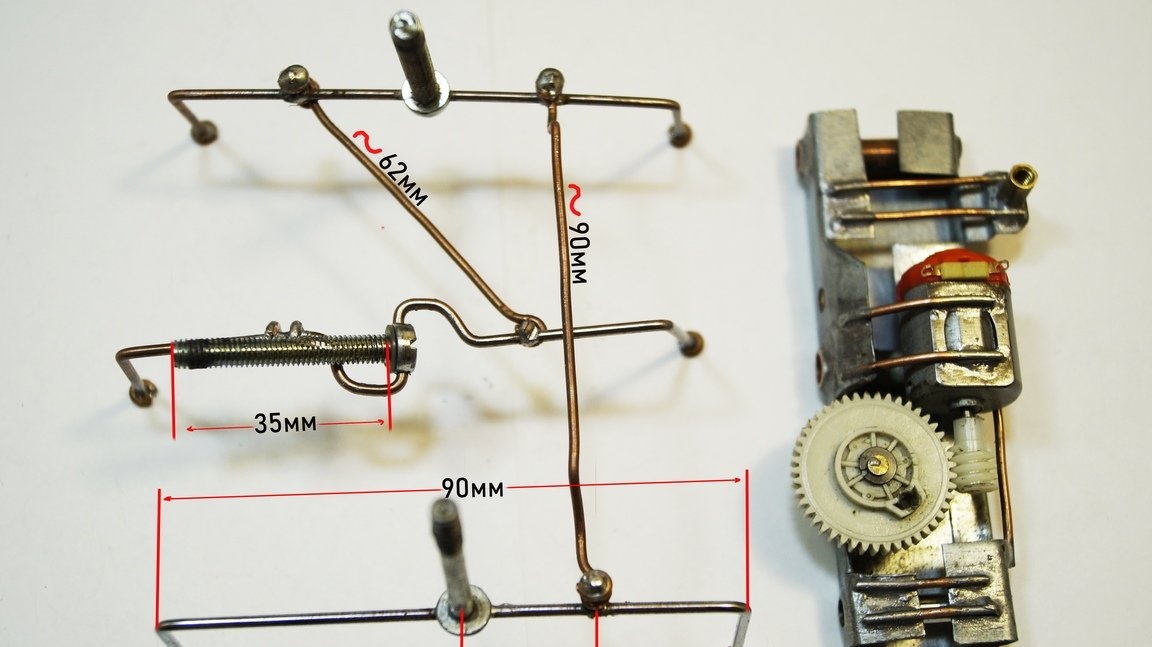
Foto 19 viser et riss fra bunnen, med poter montert på rammen.
Vi etablerer trekkraft fra veivmekanismen til fremre bein på kakerlakken. Vi gjør en skyvekraft for å kunne justere den. Veivradius 8mm Foto 20.
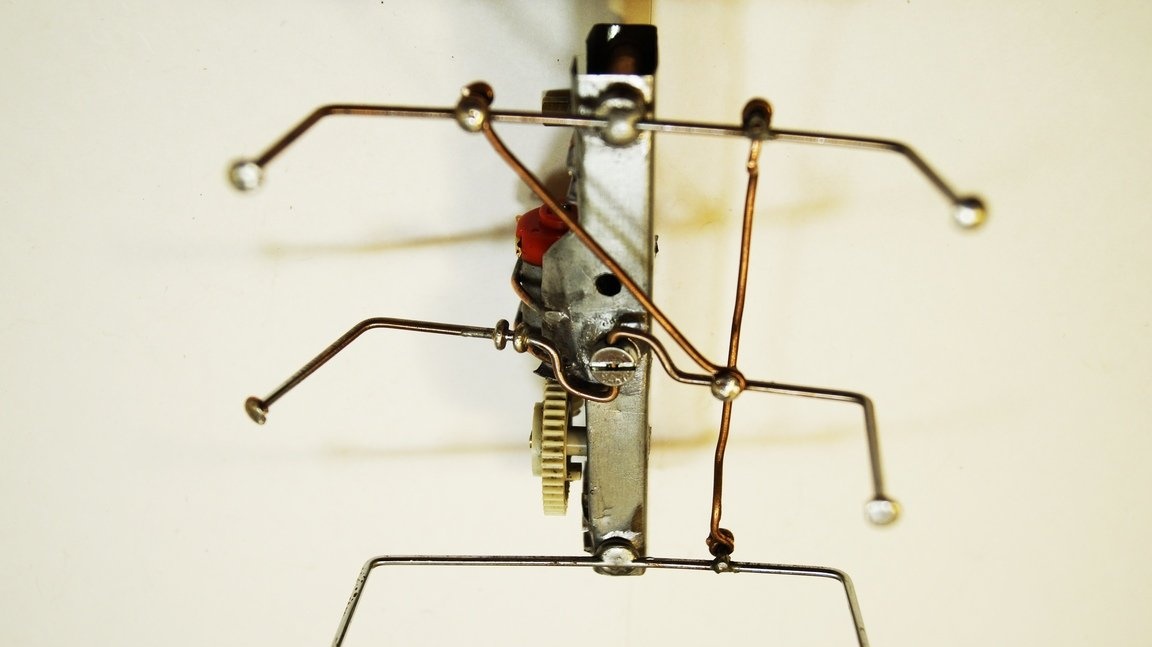
Vi lager en spak for å bevege de midtre potene vertikalt fra kobbertråd Photo 21.22.
Dette fullfører den mekaniske delen av kakerlakken.
Foto 21.

Foto 22 viser potenes plassering i den nedre stillingen av skaftet til veivmekanismen.
Foto 22.

5. Den elektriske delen.
Lim batterirommet på et tosidig teip til kakerlakkrammen. Lim på strømknappen på batterirommet. Vi lodder alle elementene i Foto 23.
Roboten - kakerlakken er klar !!!