

I dag snakket forfatteren av Instructables under kallenavnet Techgenie om hvor elektronikk det er. Og han brakte en lenke til den første, der den ikke er - bare en elektriker. Det er mer elegant, og det vil bli diskutert i min oversettelse.
Hvis du fremdeles ikke vil at du skal ha en, kan du se videoen og ønske denne enheten hjem fra de første sekundene av visningen:
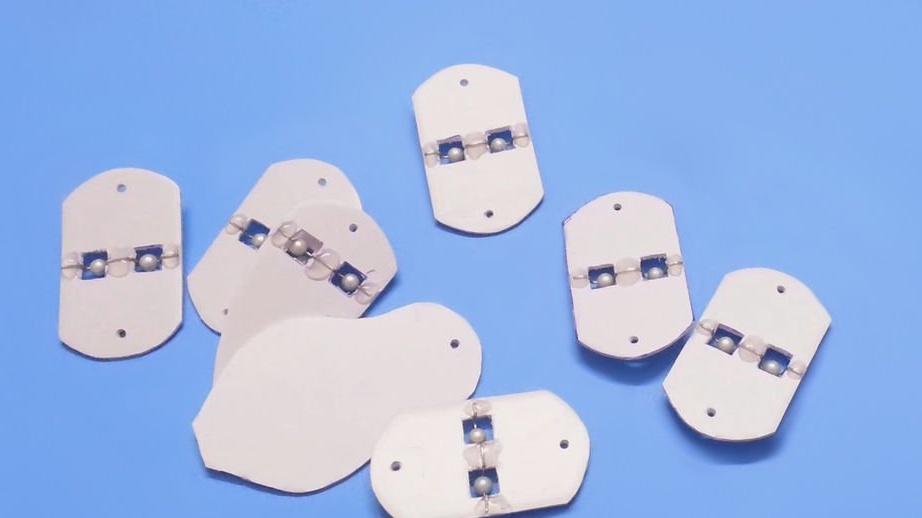
Mesteren kutter ut koblingene til robotslangen fra papp:
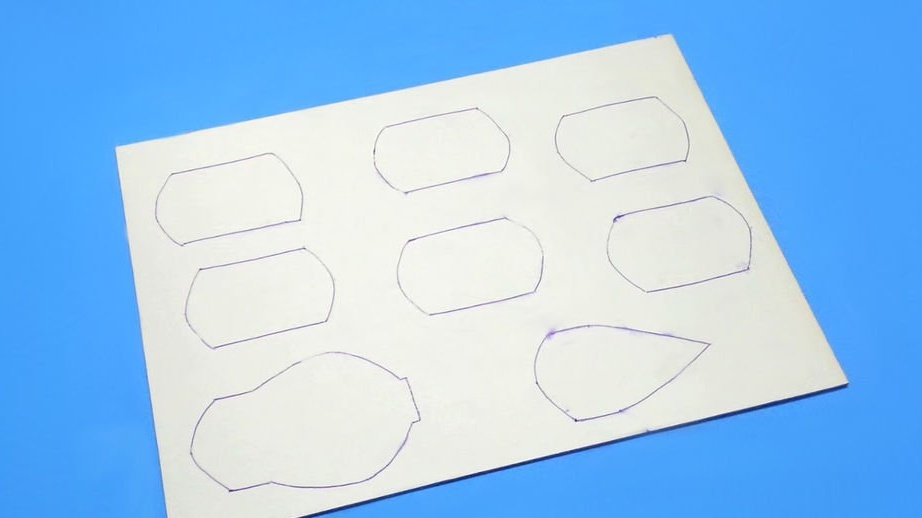
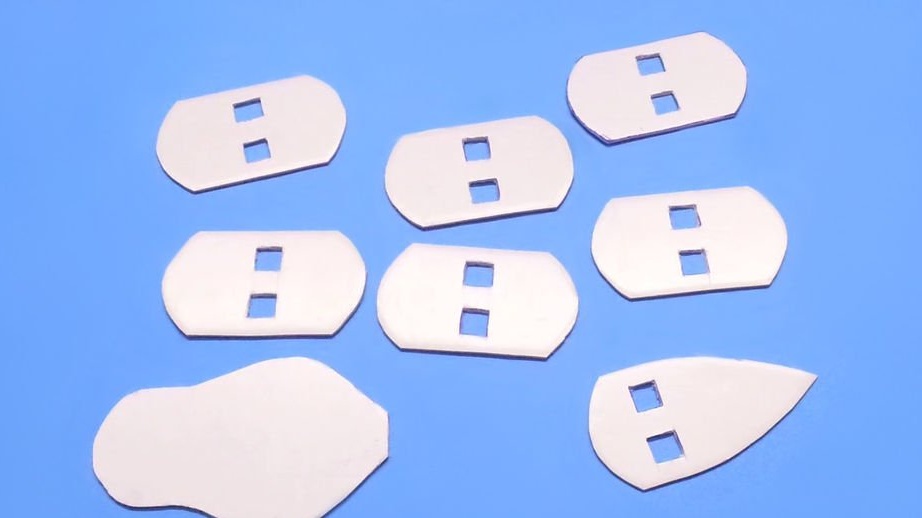
Utdrag fra et ark:

Lager firkantede hull for ruller i dem:
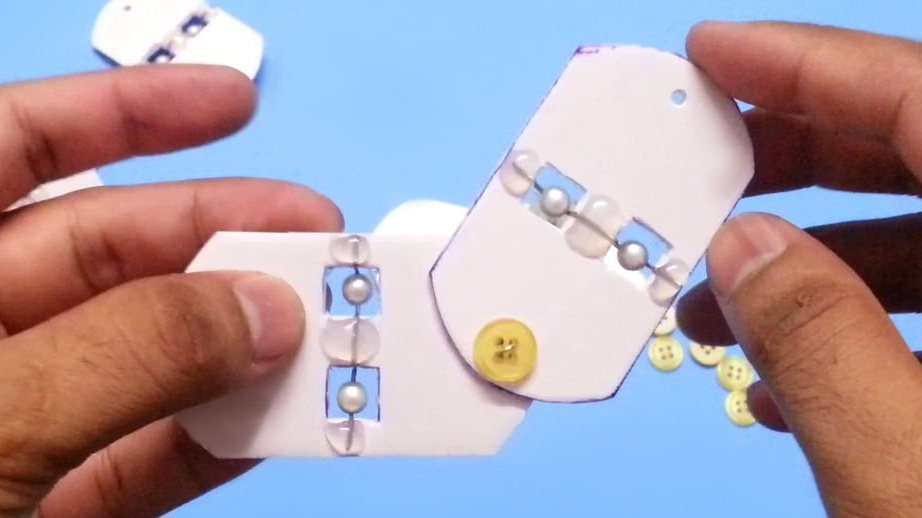
Som lager av perler og binders, hilsener "DU Vasily Biletsky":
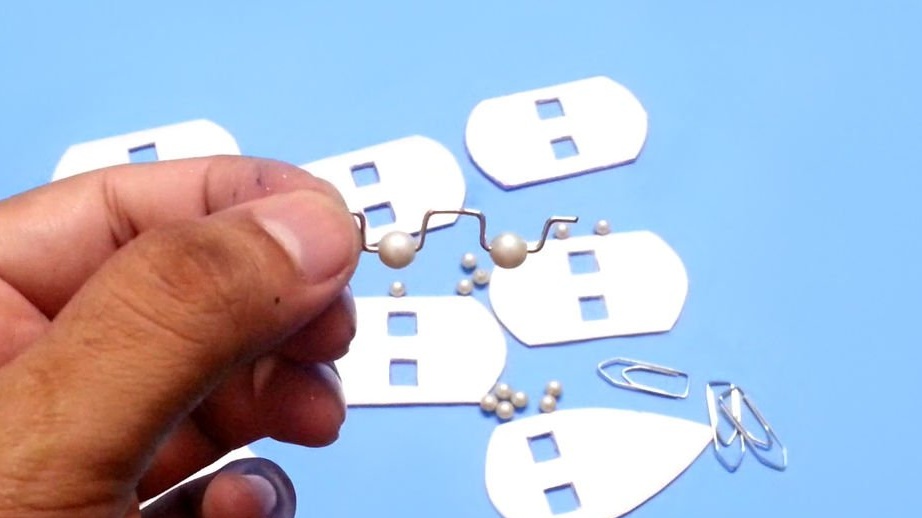
Fester valsenes akse med en limpistol, sørger for at selve rullene ikke sitter fast med lim. Bor hull for tilkoblingslenker:
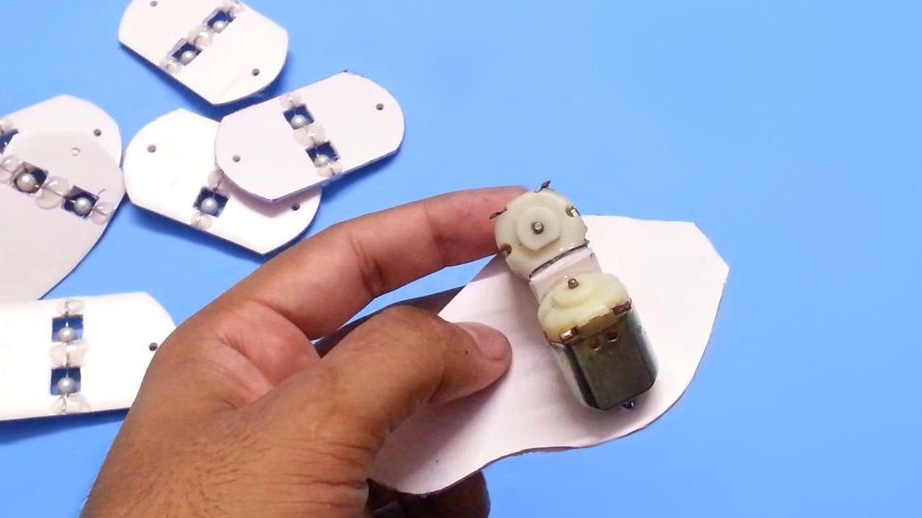
Fester en trekantet holder for likestrømsmotorer:

Bruker motorer, noterer hvor du skal bore hull for sjakter, øvelser, gjengede aksler, limmotorer:
På akslene til motorene lager smeltekluter:
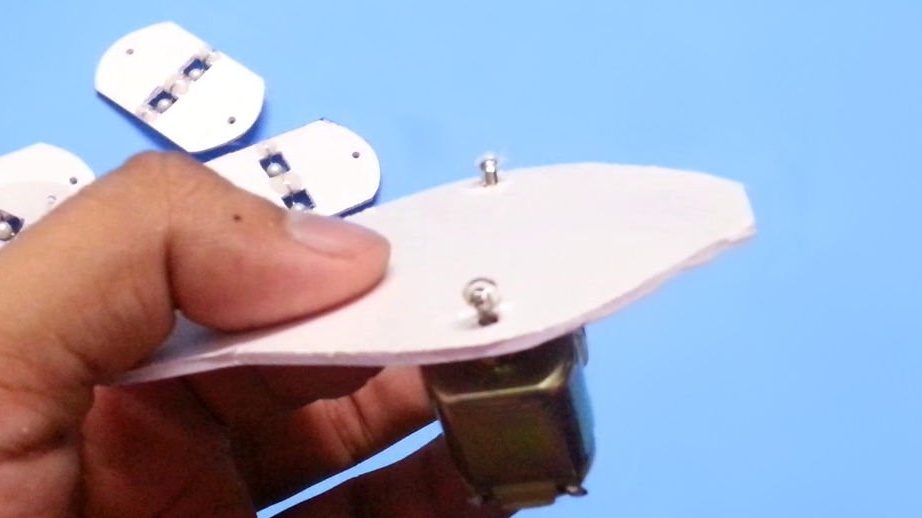
Kobler koblinger med ... ledning og knapper:
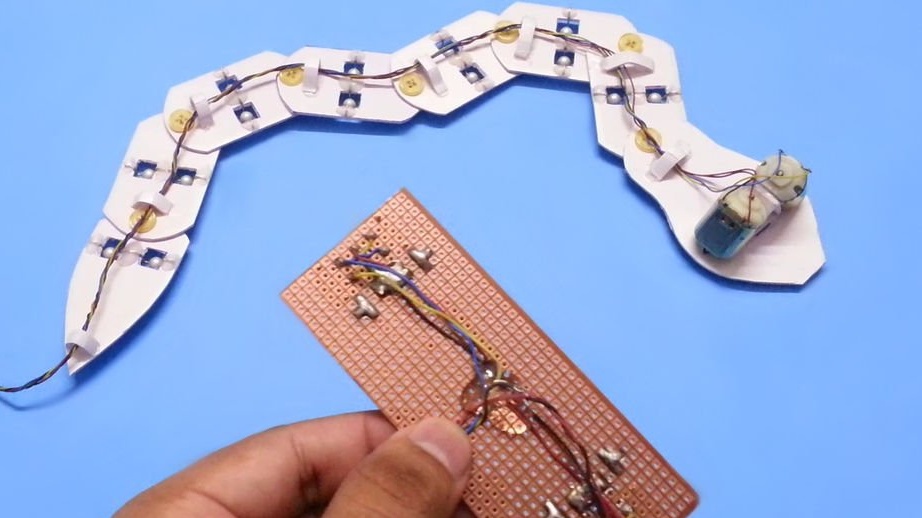
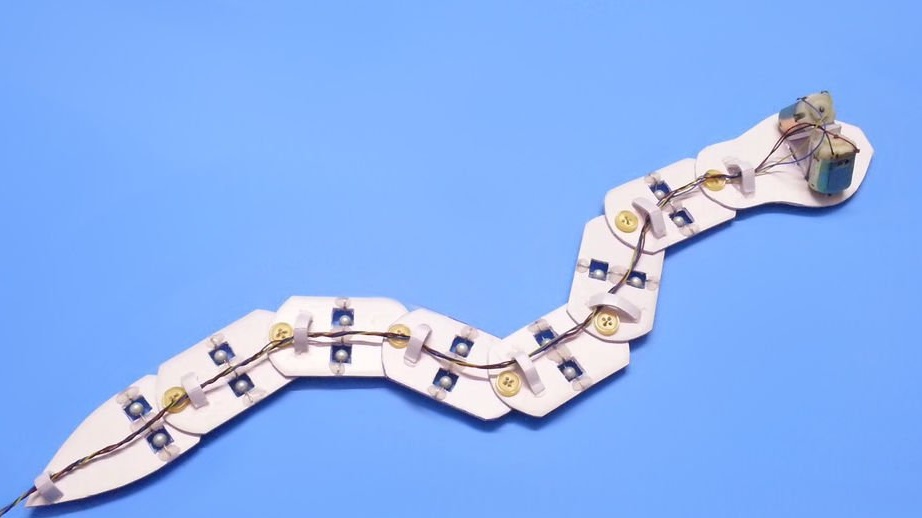
Robotslangen er satt sammen, men den er fremdeles ubevegelig:

Han kutter pappstrimler, tar en firetrådskabel, selger to ledninger til hver av motorene, og fester den med den første stripen:

Og resten:
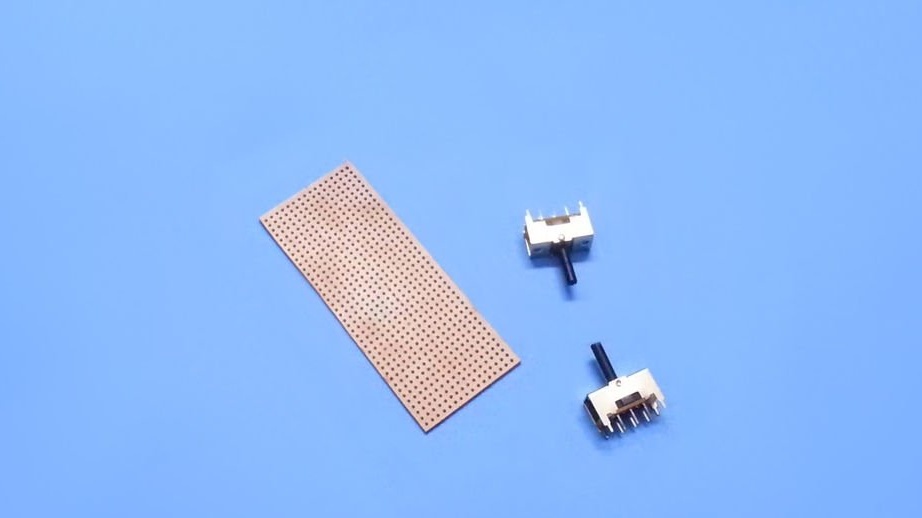
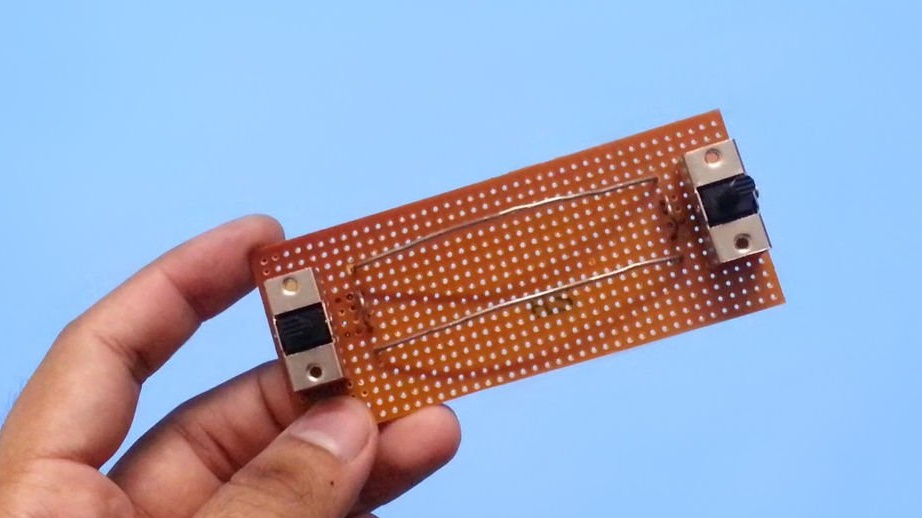
Den tar to brytere til tre posisjoner (midt til av) og to retninger, samt et stykke av en brettbrett av perfboard-type:
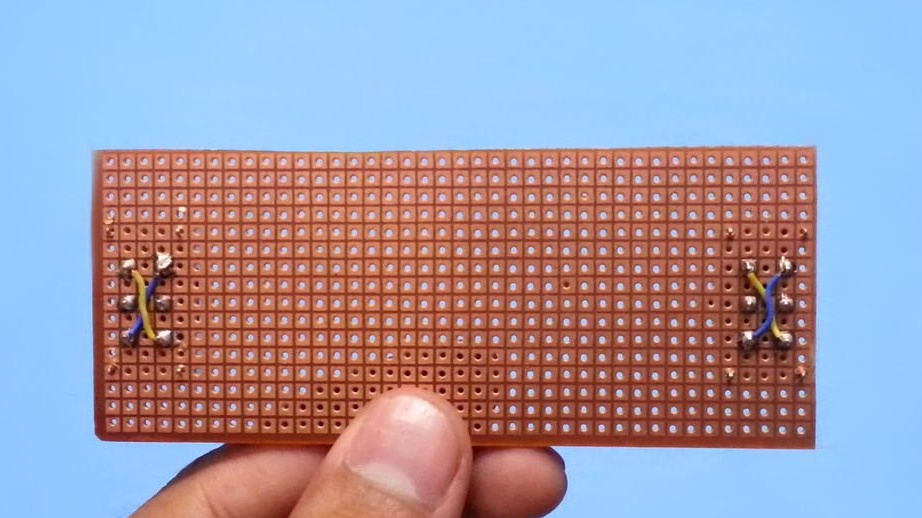
Ved hjelp av hoppere, gjør begge byttere til reversible:
Han lager fjærer for 18650-batteriet fra binders, setter det. Ikke gjør det! Ta det ferdige rommet! Bruk bare batteriet med beskyttelse! Bedre ennå, et rom for 2 stk. AA eller AAA med passende celler eller batterier.
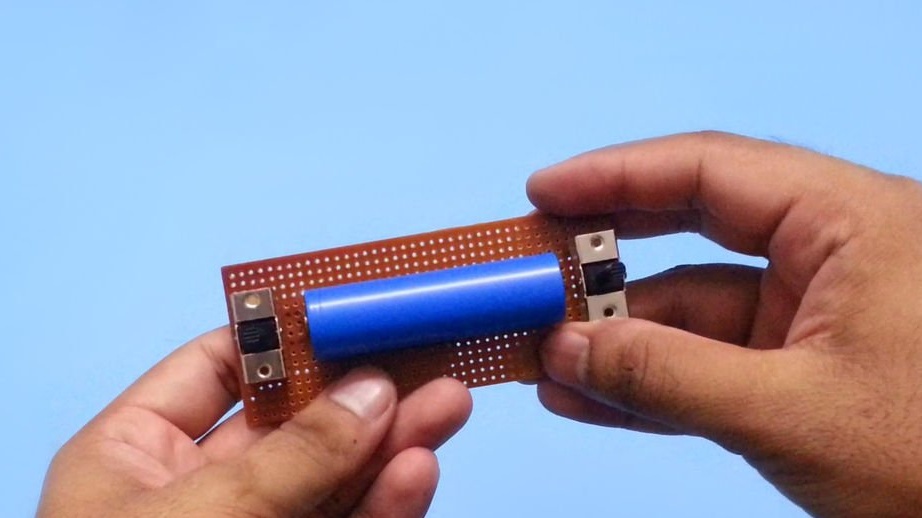
Langsgående stifter bidrar til å holde batteriet på plass:
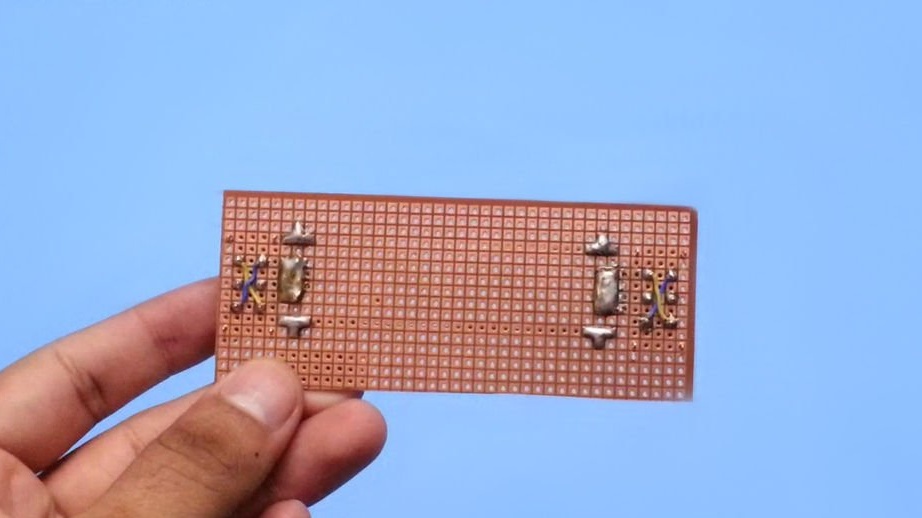
Så mens baksiden av fjernkontrollbrettet ser ut:
Skipsføreren kobler kabelen til robosnake, gjør tilkoblinger i henhold til ordningen:

Nå ser baksiden av fjernkontrollen annerledes ut. Kabelen er festet med smeltlim, det er viktig at det er et isolerende lag av dette limet mellom det og brødplaten. Nå må denne siden av brettet dekkes med et dielektrikum, siden selvinduksjonspulser oppstår når motorene er slått av.
Det er alt gjort:

På grunn av designfunksjonene til robosnake, med de samme bryterposisjonene, må motorene rotere i motsatte retninger. Hvis dette ikke er tilfelle, må en av dem reverseres. Deretter velger du eksperimentelt posisjonen til fjernkontrollen, der den fremre posisjonen til begge bryterne tilsvarer fremoverbevegelsen. Motorer kan stoppes og reverseres separat, og tvinger robosnaken til å utføre forskjellige triks.