
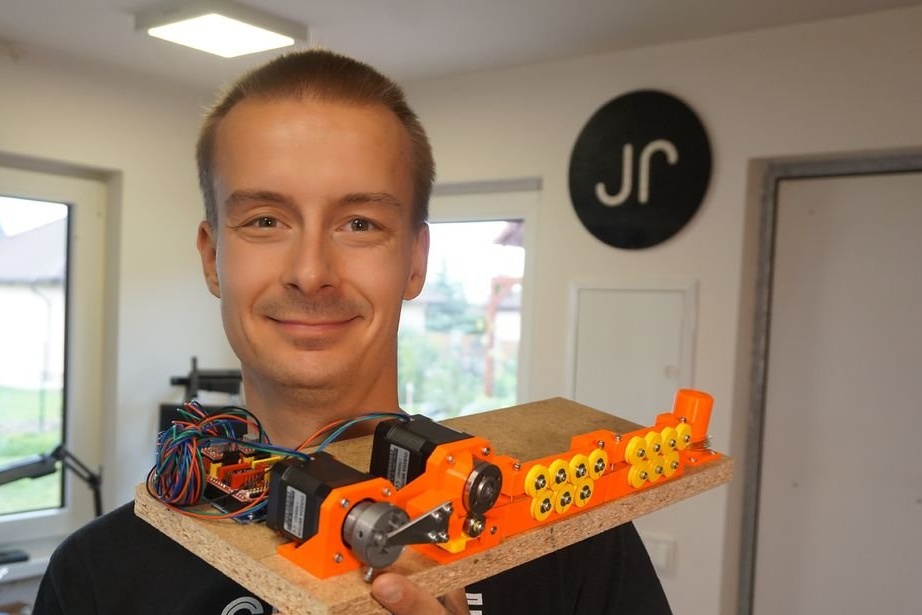
En interessant enhet ble oppfunnet og produsert av Mesteren, dette er et apparat for å bøye tråd av hvilken som helst form. Å lage fjærer er en av funksjonene. Denne maskinen er i stand til å bøye 0,8 / 0,9 / 1 mm ledning til hvilken som helst 2D-form.
Hovedmålet med produksjonen av denne maskinen var å automatisere bøyeprosessen. Andre hjemmelagde maskiner er ikke veldig nøyaktige, og bøyene deres har en ganske stor radius.
Den andre oppgaven var å gjøre det så enkelt som mulig ved bruk av ofte tilgjengelige deler og komponenter. Noen deler av maskinen er trykket på en 3D-skriver, og metalldeler kan kjøpes i butikken.
Hva er mesteren for en slik maskin til? Han er interessert i å lage LED-figurer, snøfnugg, stjerner, blomster osv. I deres fremstilling trengs identiske deler fra ledning, og denne maskinen vil lette produksjonen.
La oss se en kort video med et eksempel på enheten.
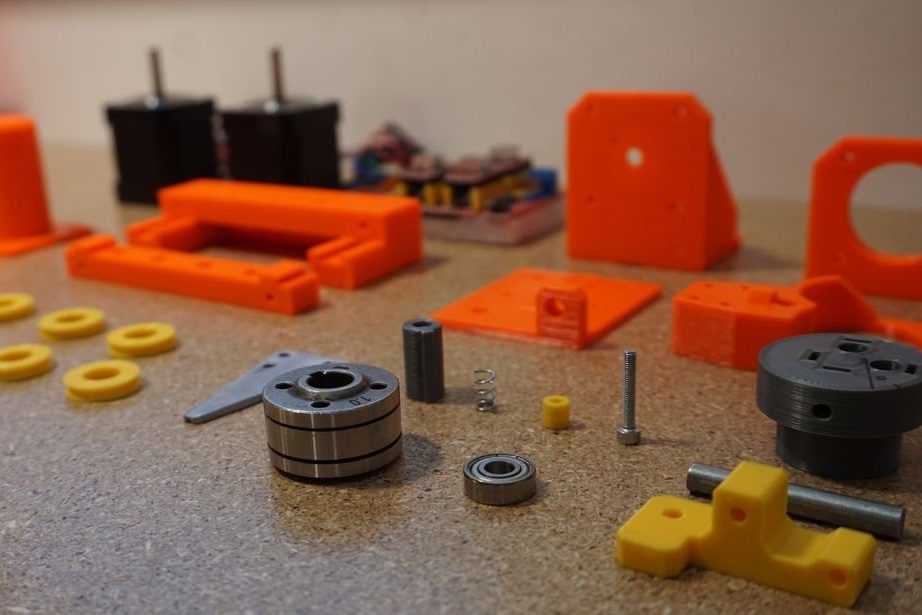
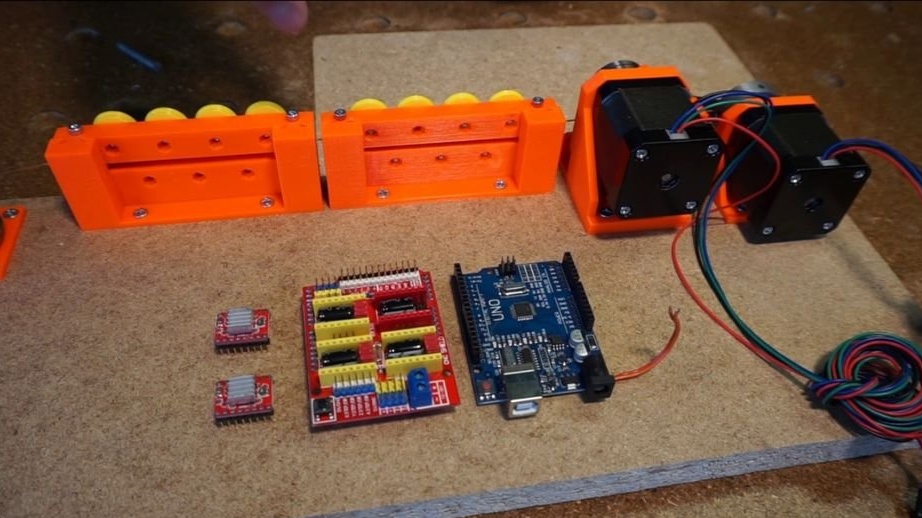
Så for fremstilling av en slik maskin, brukte mesteren følgende
Verktøy og materialer:
-3D detaljer (utskriftsfiler kan lastes ned her);
-Krepezh;
-Arduino UNO;
-Ekspansjonsstyre for Arduino UNO;
-Trinn driver A4988 -2 stk;
-Steg motor NEMA17 -2 stk;
-12V 3A strømforsyning;
- trådmatningsmekanisme;
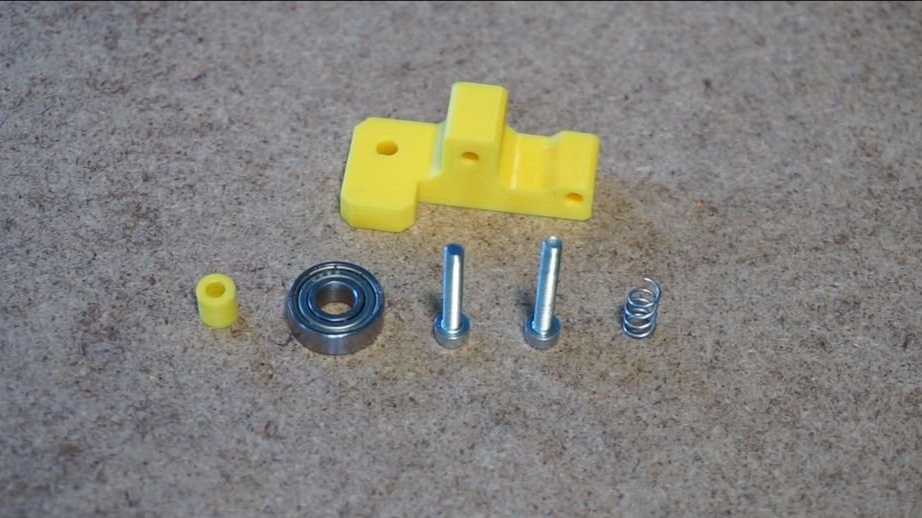
-Stellfjær 4x6 mm;
- Peiling 3x10x4 mm;
-Bærende 6x15x4 mm;
-6 mm stålstang;
- Stålplate 2 mm tykk;
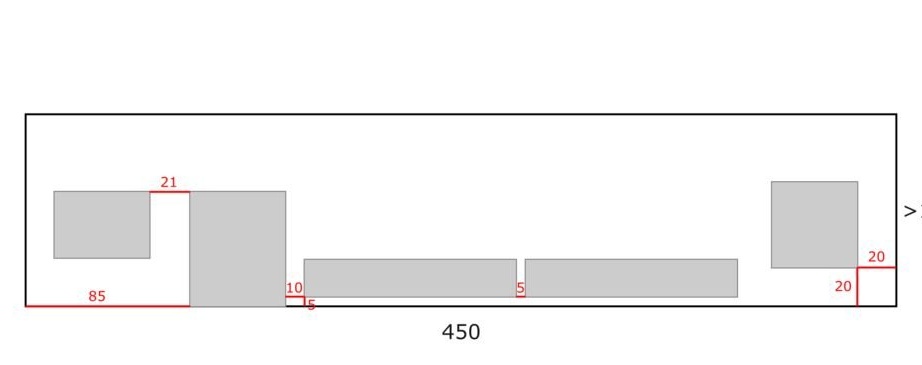
-Vedkort for sokkelen 450x100 mm;
- skrutrekker;
gon;
Trinn en: Slik fungerer det
La oss se på hvordan maskinen fungerer (fra høyre til venstre).
Spoleholder - den holder trådspolen for behandling av maskinen.
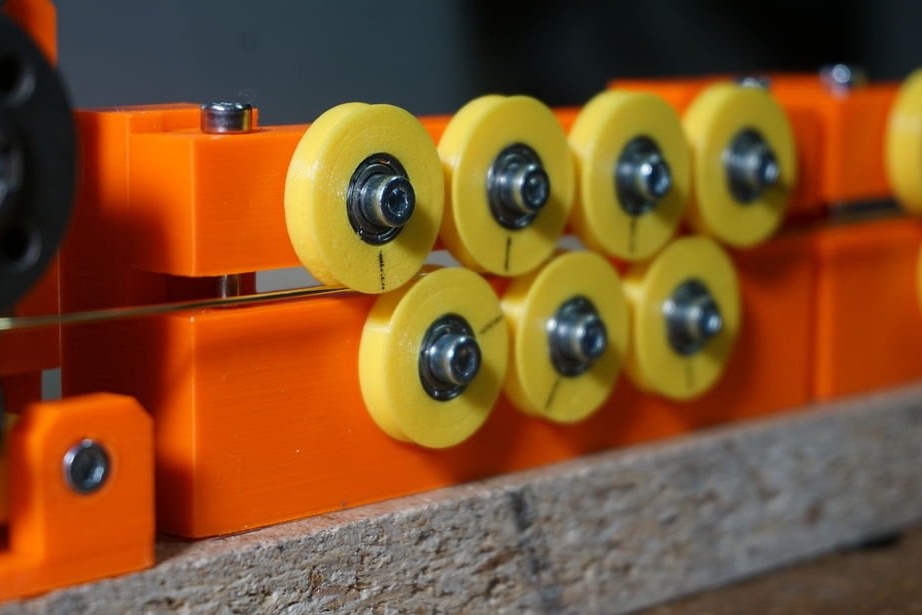
Likeretter - et sett med 7 ruller slik at ledningen er så jevn som mulig. Å jobbe med rett ledning er avgjørende. Det er derfor to likerettere.
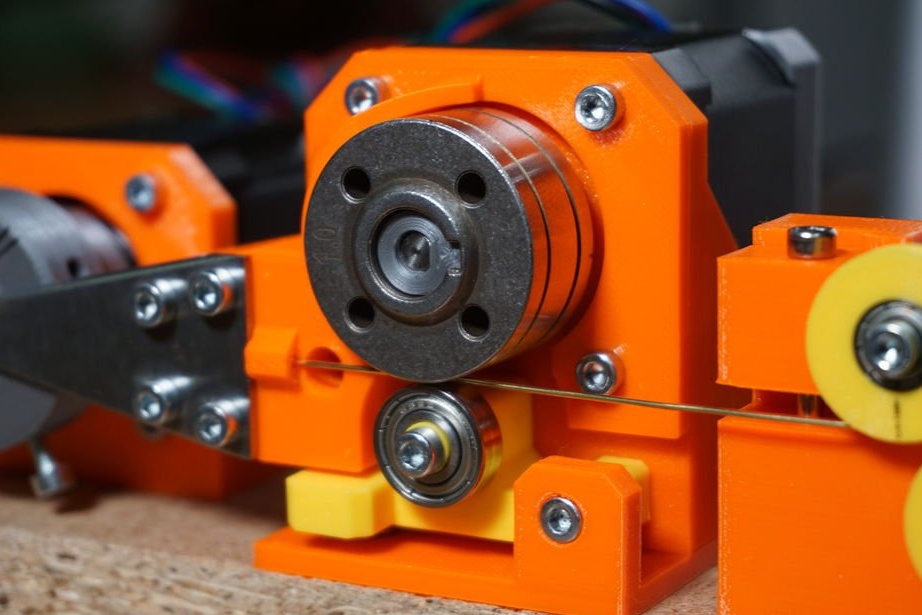
Broach - du kan finne en lignende mekanisme i 3D-skriveren din. Et sett med tannhjul drar ledningen fra rullen gjennom rullene og skyver den til bøyehodet. Matemekanismen må ha tilstrekkelig trådtrykk slik at den ikke glir. Mer om dette senere.
Bøyemaskin - den bøyer ledningen i en programmert form.
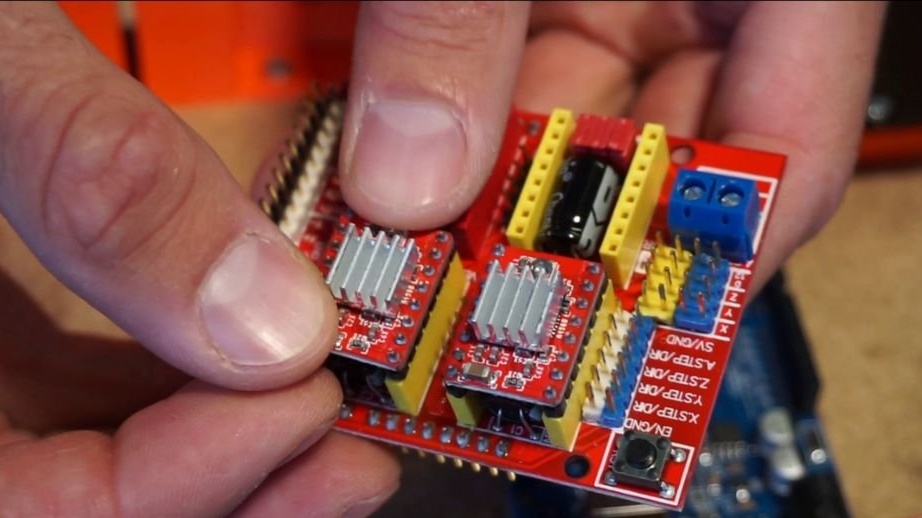
Alt dette kontrolleres av en Arduino FN med et CNC-skjold.En kommando blir sendt til Arduino fra datamaskinen, og den oversetter dem til kommandoer for trinnmotorer.

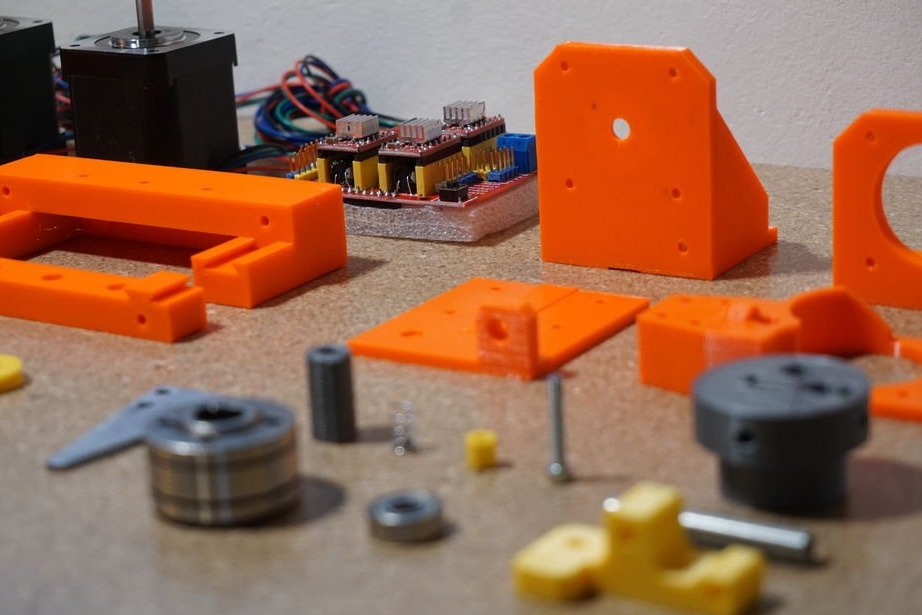
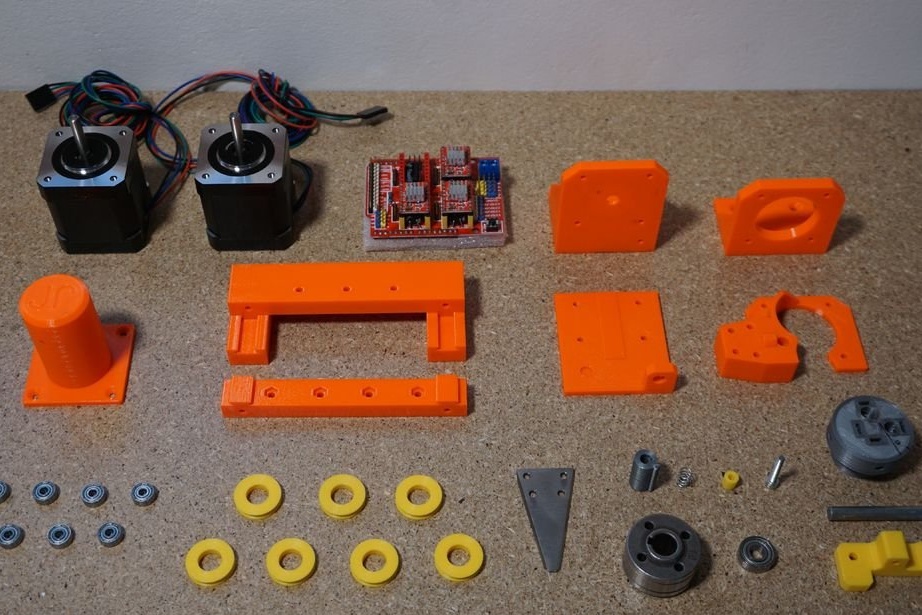
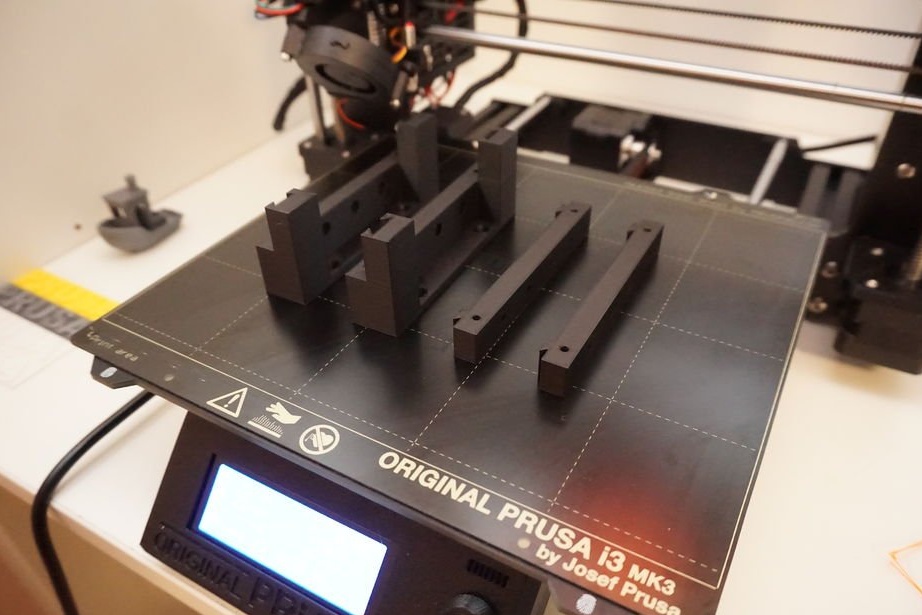
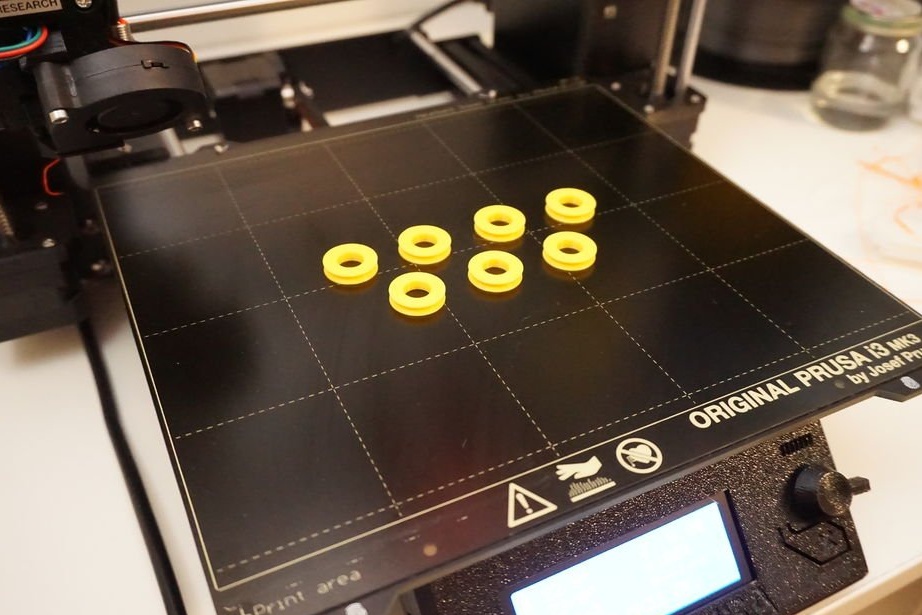
Trinn to: Skrive ut deler
Du må skrive ut følgende detaljer og i følgende mengde (for å unngå forvirring, originalteksten):
Bender
Verktøyhode
Motorramme
Feeder
Motorramme
Bunnramme
Ledningsguide
Vogn for tomgang
Mellomrom for tomgangsutstyr
Mating avstandsstykker
Bøyeplate (mal)
Retter (2x)
Sengestativ (2x)
Topp rammehjul (2x)
Rulle (14x)
Spoleholder
Laghøyde når du trykker 0,15 mm. 40% fylling. Utskriften tar to dager.
Trinn tre: Bøyemaskin
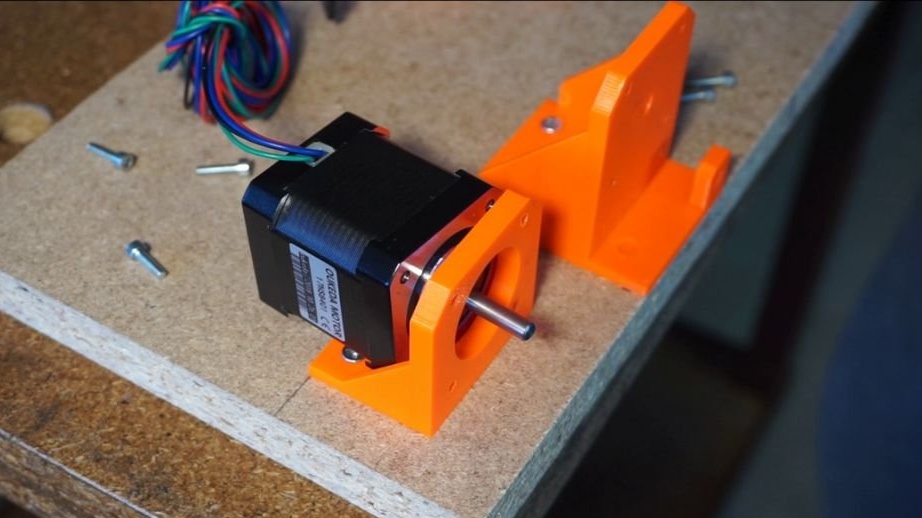
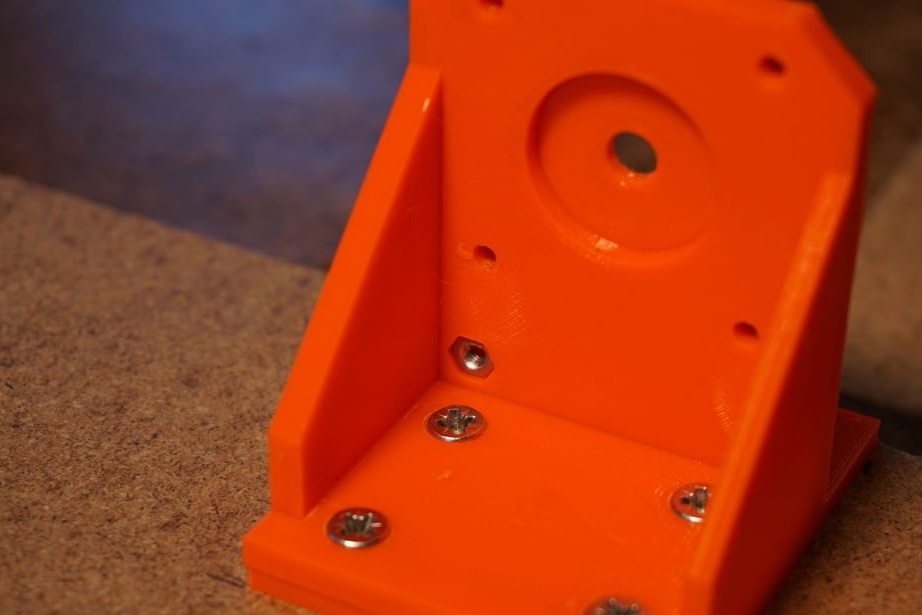
Skipsføreren skruer to rammer til basen. Det er viktig å installere begge rammene som vist på tegningen.
Fest steppermotoren til rammen. Fest hodet til motorakselen.


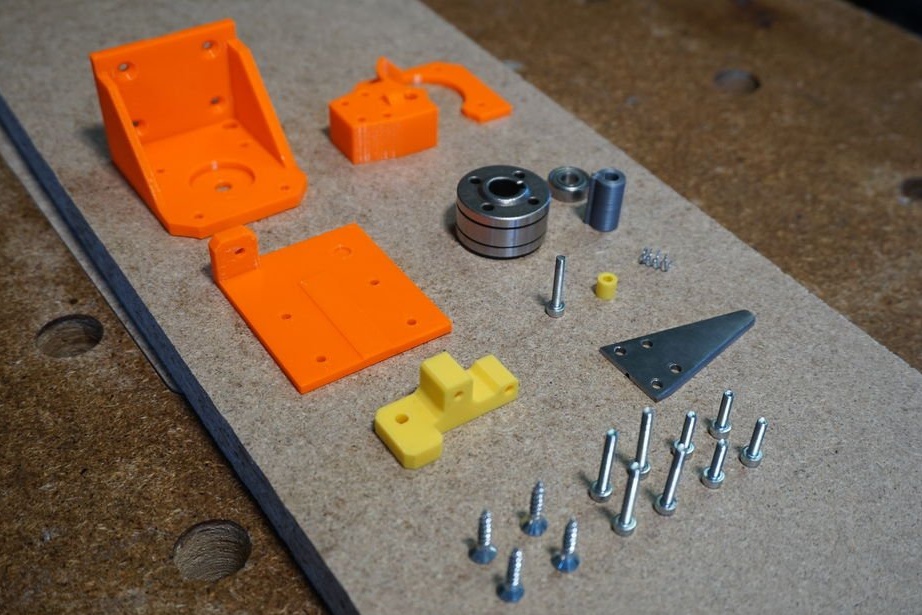
Trinn fire: Broach
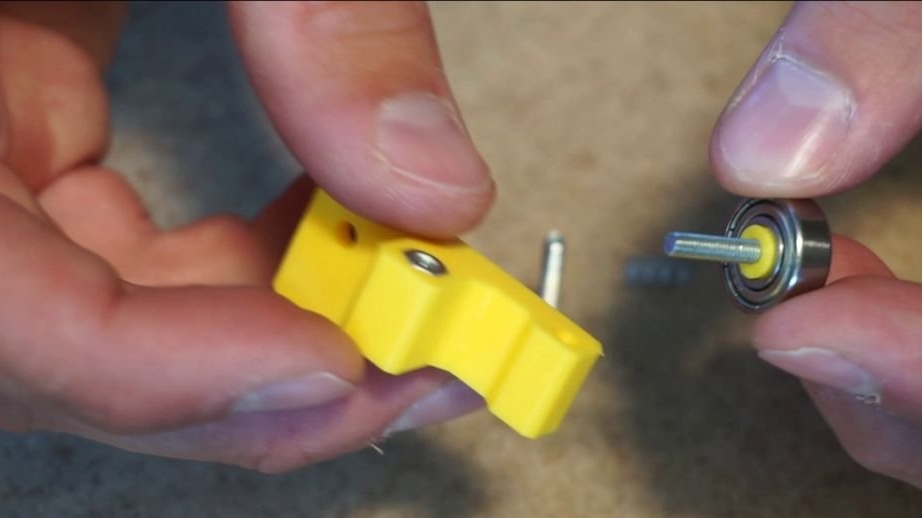
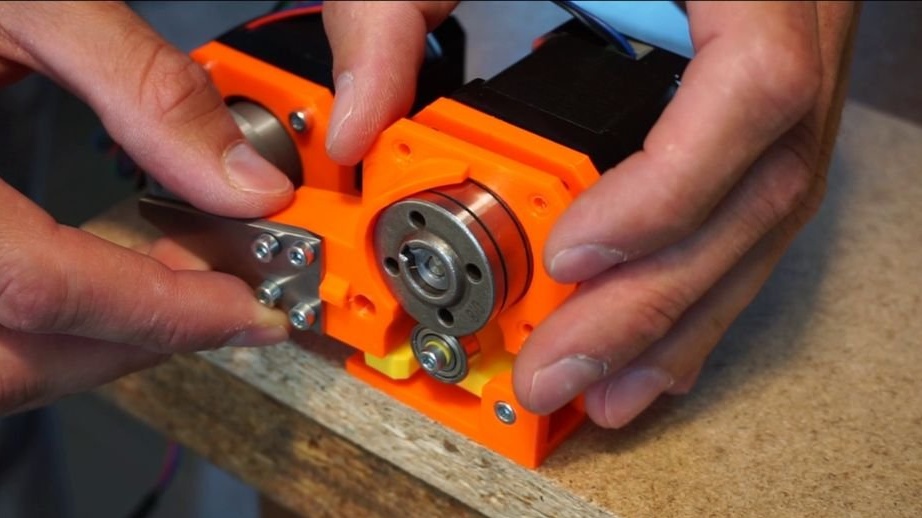
Rammen er allerede installert, så det første trinnet i å lage en matemekanisme er å bygge en vogn for mellomgiret, som vil presse ledningen til matemekanismen. Fjern plastpakningen inne i 6x15x4 mm lager. Monter lageret på M3x20-bolten. Sett M3-mutteren i vognen og skru lageret på bolten. Forsikre deg om at lageret roterer fritt. Sett den andre M3-mutteren inn i motorrammen (motorsiden i nedre venstre hjørne) og skru vognen gjennom den lille beslaget ved hjelp av M3x20-bolten. Ikke stram bolten for hardt; vognen må bevege seg fritt. Løft vognen og sett fjæren inn i hullet under den.
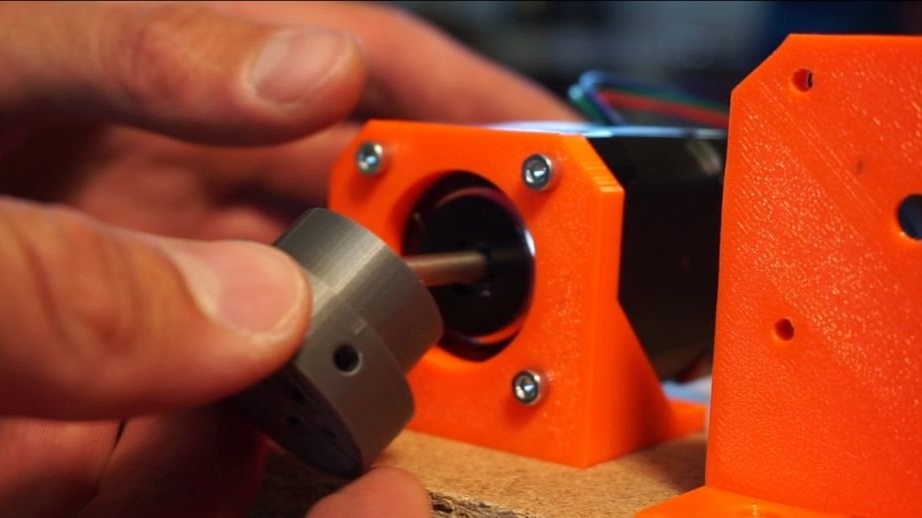
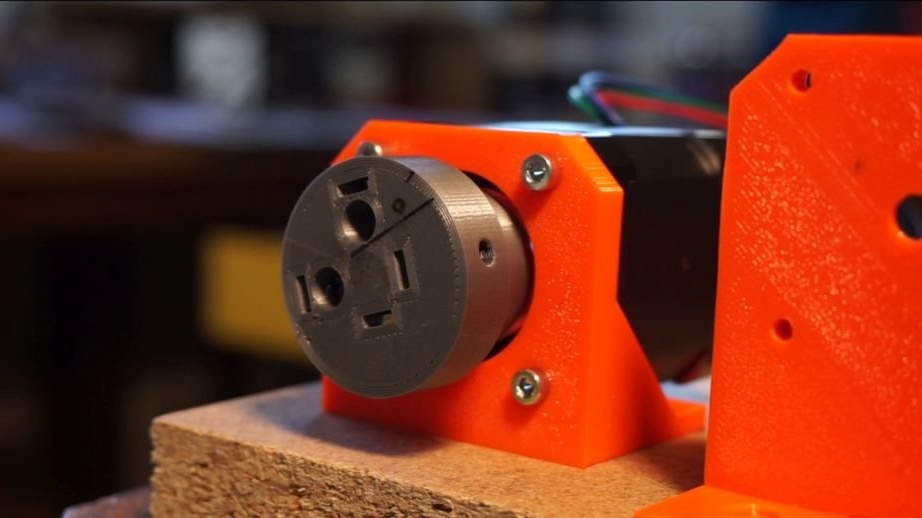
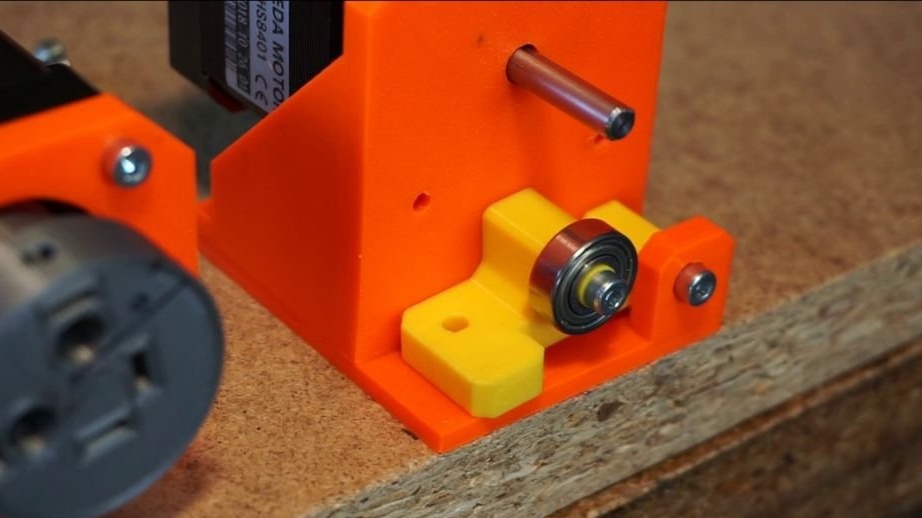
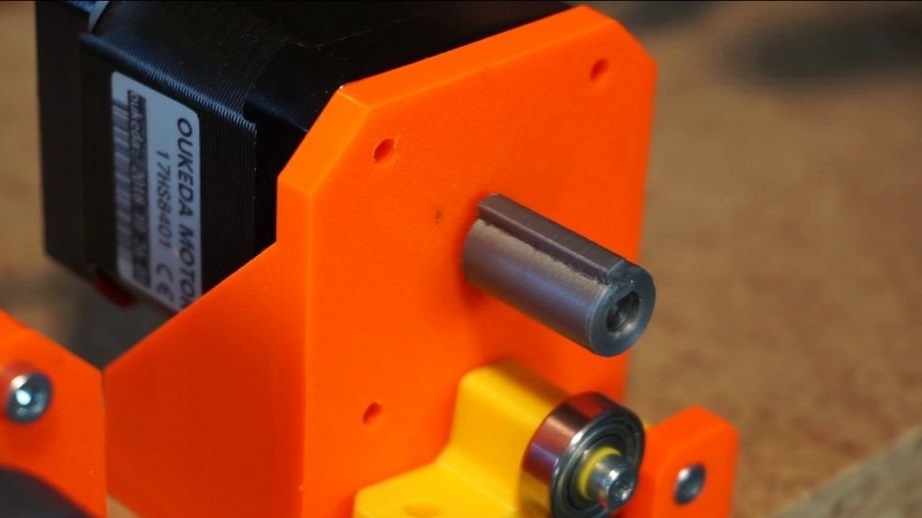
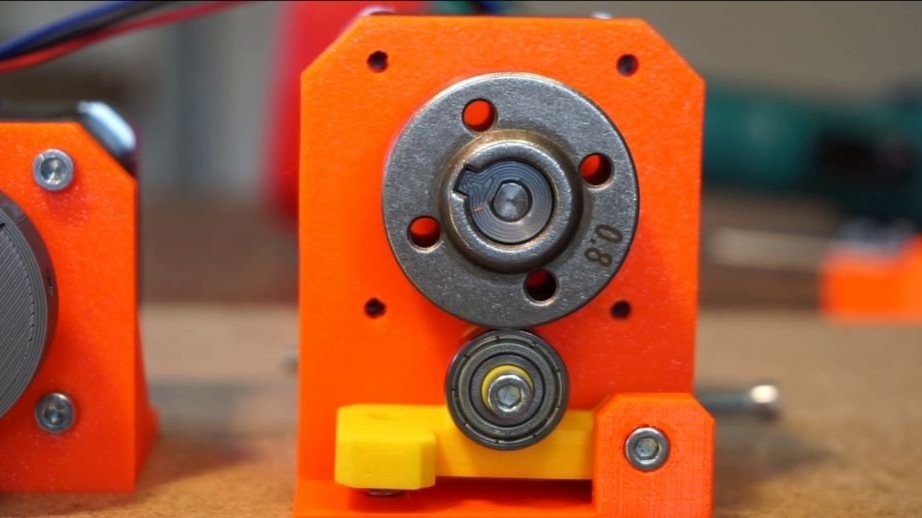
Ta den andre trinnmotoren og installer den i motorrammen. Ikke skru enda. Trykk avstandsstykket på matemekanismen til motorakselen og installer matemekanismen.
Matemekanismen som mesteren bruker er hentet fra en MIG-sveisemaskin. Mekanismen har to utsparinger på spolen. En for 0,8 mm ledning og en for 1 mm ledning. I motsetning til gir (tidligere prøvde mesteren å mate ledningen med dem), etterlater ikke denne mekanismen spor på ledningen.
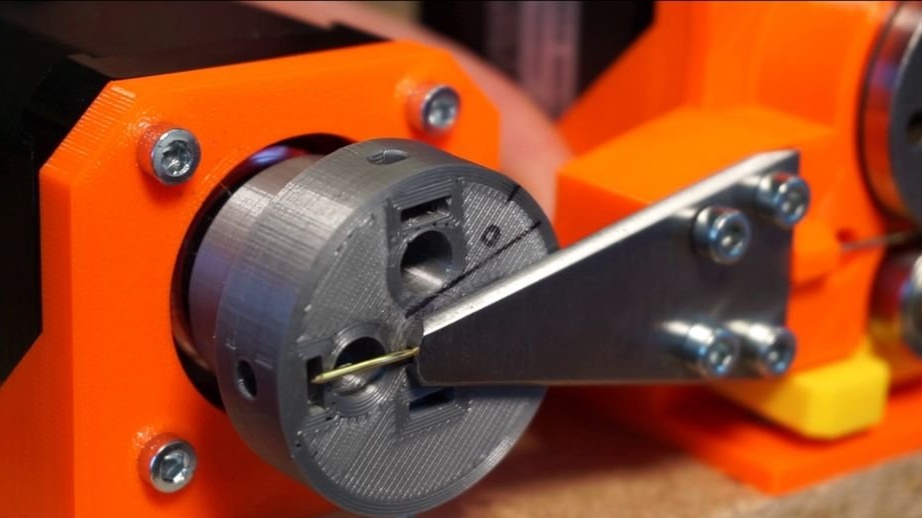
Materen og bøyeanordningen er forbundet med en bøyeplate - en 2 mm tykk metallplate med et lite spor på bakveggen, som mater ledningen direkte til midten av bøyehodet for perfekt bøying. For utskrift er det en plastbøyeplate som fungerer bra, men slites raskt og krever hyppig utskifting. Du kan bruke den, eller du kan lage en metallplate på den.
Deretter tar du plastdelen av trådføreren og installerer de fire M3-mutterne i hullene på baksiden. Skru nå bøyeplaten med M3x20-boltene. Plasser trådføringen foran motorrammen til matemekanismen og fest den til motoren med fire M3x12-bolter. Juster posisjonen til bøyeplaten. Den skal være nøyaktig i midten av bøyehodet.
Brosjen er klar. Hvis du har en rett ledning, kan du bruke ledningen akkurat nå. Ellers trenger du en likeretter.





Trinn fem: Broach
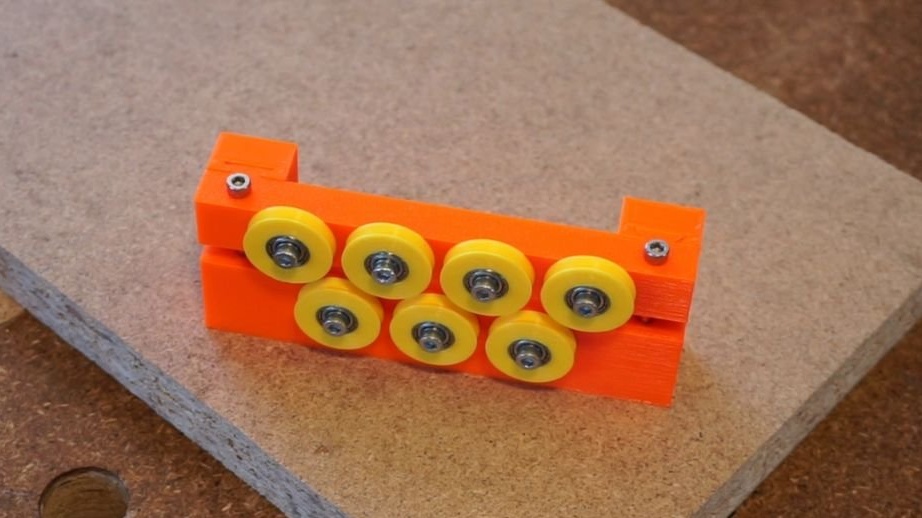
Ledningen leveres vanligvis i spiralform. For å bøye ledningen, må du først rette den. Likretteren består av 7 ruller (4 på toppen og 3 på bunnen), som kan presses mot hverandre for å sikre riktig trådspenning. Det forhindrer også vridning av ledningen under bøying.
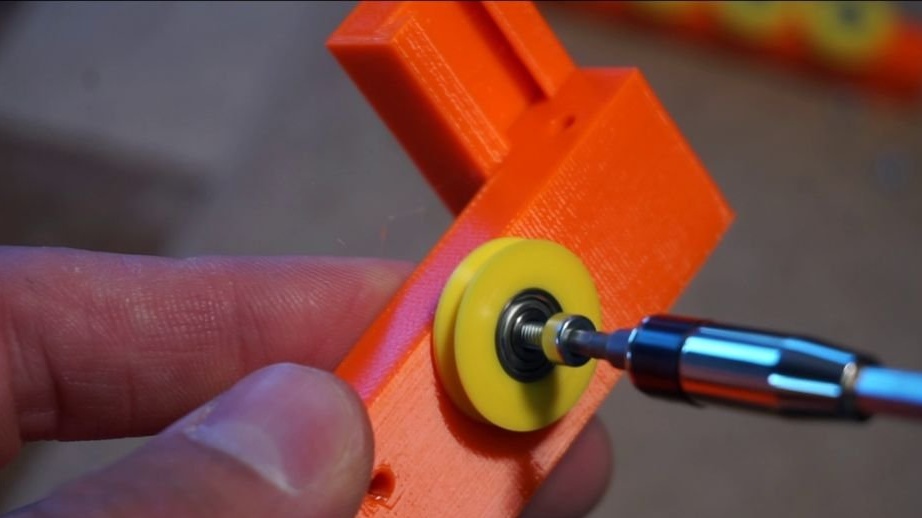
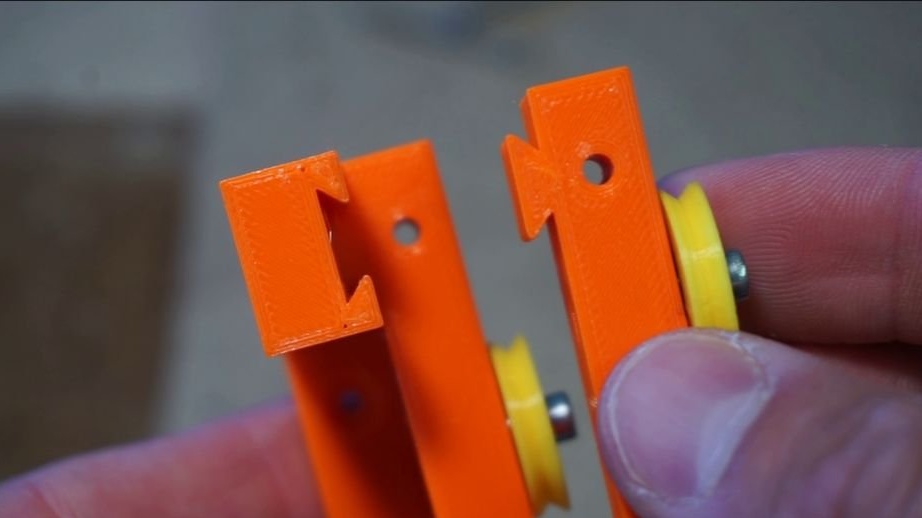
Start monteringen med rullehjulene. Først må du trykke lageret 3x10x4 mm inn i plastrullehuset. Sett inn M3x12-bolten på den ene siden og M3-skiven på den andre siden av rullen. Skiven vil forhindre friksjon av hjulet på rammen. Skru alle rullene til nedre og øvre ramme. Koble til begge rammene. Fest rammene med to M3x40-bolter.
Du kan spare penger på rullelager. Skriv ut Straightener_RollerNoBearing-delen i stedet for Straightener_Roller. Men ytelsen blir litt dårligere.
For enda bedre resultater, bruk 2 rettetang på rad.




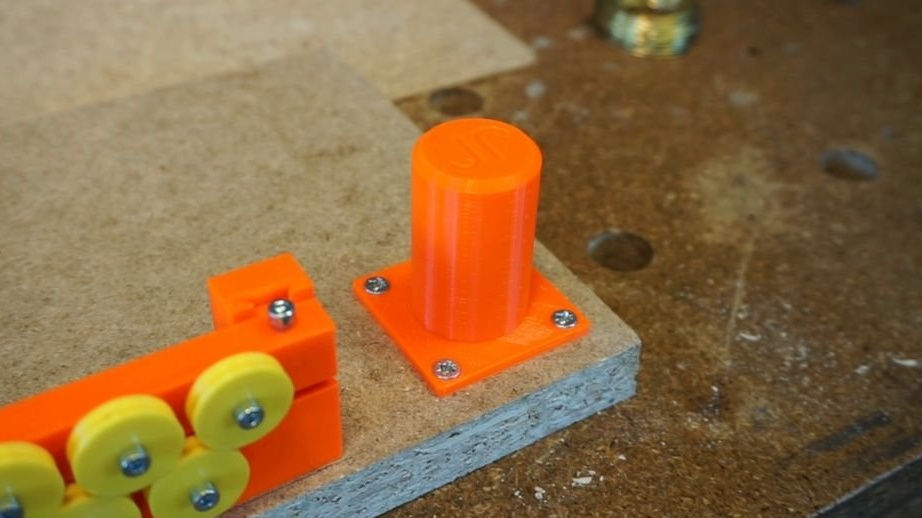
Trinn seks: spiralholder
Spoleholderen er en enkel sylinder som holder ledningen og lar den slappe av fra spolen. Skru den til basen med fire 3x16 skruer.
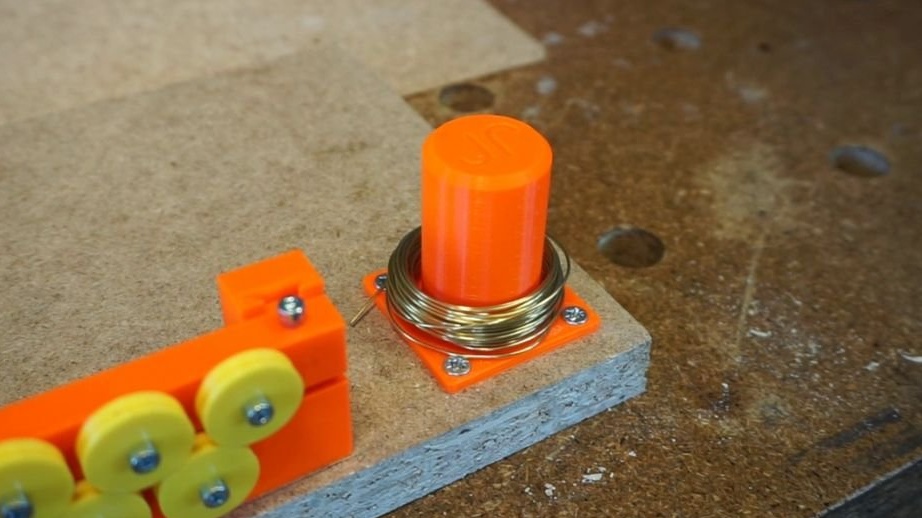
Trinn syv: koble til
Først må bøyetråden mates til maskinen. Mesteren bruker 0,8-1mm messingtråd i form av en spole.
Ledningen går fra spolen gjennom rullene. Bare stikk ledningen mellom rullene. Så går hun gjennom broach.Juster innstillingen til matemekanismen slik at rennet er i flukt med overflaten på trådføreren. Trykk spaken i mellomgiret og skyv ledningen gjennom materen til bøyeplaten. Slipp spaken og la den presse mot matemekanismen. Du kan nå bla manuelt i matemekanismen for å skyve ledningen til bøyehodet. Juster forsiktig spenningen på rullene ved å stramme boltene. Rullene skal ikke rotere fritt, men ledningen skal bevege seg jevnt.
Dernest elektronikk Kontrolleren må også være tilkoblet. Mesteren bruker den klassiske Arduino UNO med CNC og to A4988 trinnmotordrivere. Matemotoren er koblet til Z-aksen og bøyehodemotoren til X-aksen. Driverne er konfigurert for størst mulig nøyaktighet - alle 3 hoppere under trinndriverne er satt inn. Alt skal kobles til en 12V 3A strømforsyning.

Trinn åtte: firmware
Nå kan du prøve å starte maskinen. Mesteren bruker GRBL sammen med cncjs. De er designet for å fungere på en fresemaskin, men fungerer utmerket for alle typer CNC. GRBL er firmware du trenger å installere i Arduino UNO. Det er en god cncjs-webklient for innstilling av parametere. Installer GRBL på Arduino og cncjs på datamaskinen din.
Etter installasjonen må du koble til maskinen og kontrollere driften ved å trykke på knappene Z +/- eller X +/-.
Nå må du kalibrere: 10 mm = Z10 $ 102 = 34 $ 110 = 1600 $ 111 = 600 $ 112 = 1000 $ 120 = 500 $ 121 = 350 $ 122 = 350
Dette er et sett med verdier som bestemmer hvordan konvertering av nummeret som er angitt i koden til motorbevegelse. Hvis du for eksempel setter Z-aksen til 30, betyr det faktisk at han skyver 30 mm ledning gjennom materen.
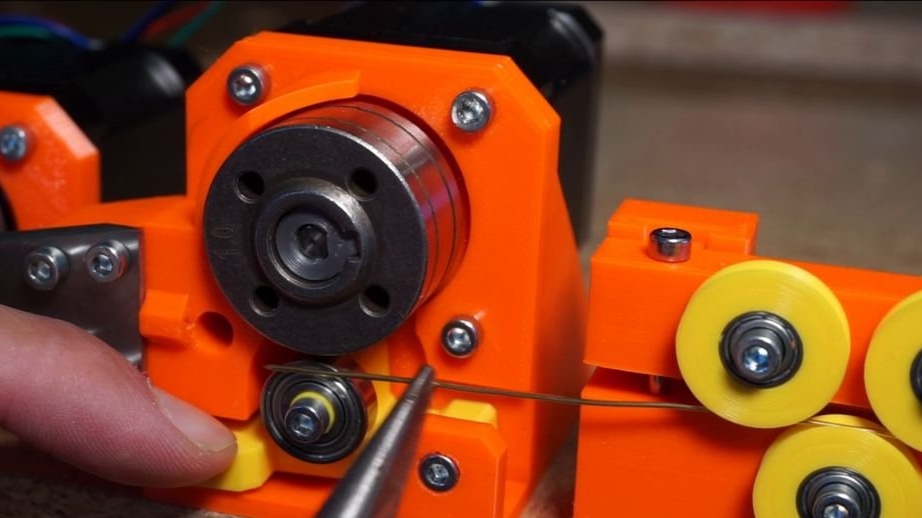
Vi fant ut kalibreringen, nå må du stille bøyehodet i nullstilling.
Bevegelsen til bøyehodet bestemmes av den velkjente faste posisjonen til bøyehodet. I dette tilfellet er dette stillingen der bøyestiften på hodet vender mot venstre. Se bildet.
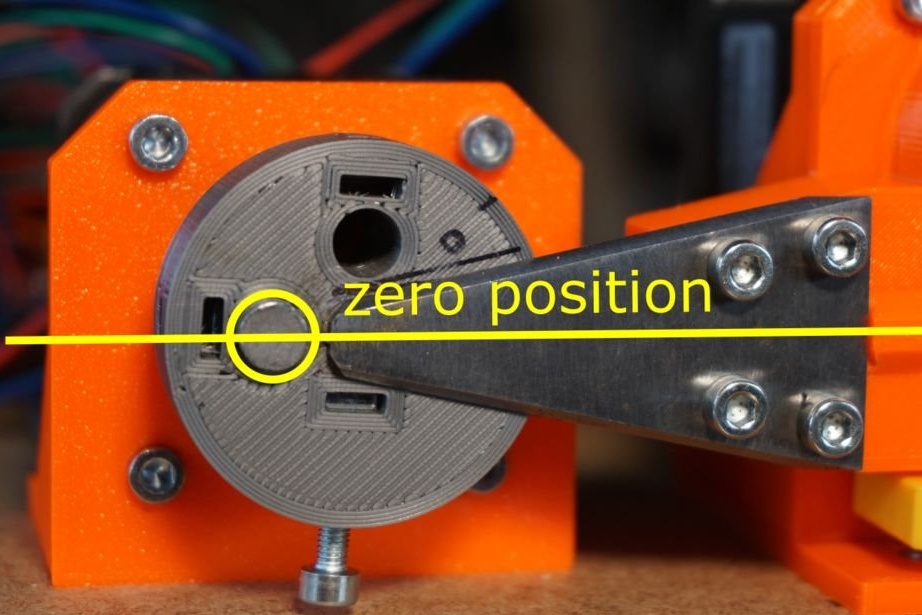
Det anbefales å merke denne nullstillingen på hodet for å kunne returnere den til samme stilling. Det er ikke behov for tilførselsmekanismen for å bestemme nullstillingen, fordi den alltid beveger seg i forhold til gjeldende posisjon.
La oss se på et Gcode-eksempel. Det ser slik ut:
G91
G1 Z1
G90
G1 X2
G1 X-6Og her er hva hver verdi er skrevet for:
G91 - bruk relative koordinater (påkrevd før bevegelse langs Z-aksen)
G1 Z1 - mat 1 mm ledning
G90 - bruk absolutte koordinater (påkrevd før bevegelse langs X-aksen)
G1 X2 - vri bøyehodet til posisjon 2 (dette tallet har ikke enheter)
G1 X-6 - vri bøyehodet til stilling -6
Hvis du gjentar trinnene 100 ganger, vil du få en fjærbøyningskode. Flere kildefiler finner du nedenfor.
hex-inner.gcode
hex-outer.gcode
spring.gcode
Maskinen er klar. Men mesteren vil fortsatt jobbe med å forbedre det.
Hele prosessen med å produsere en slik maskin kan sees i videoen.