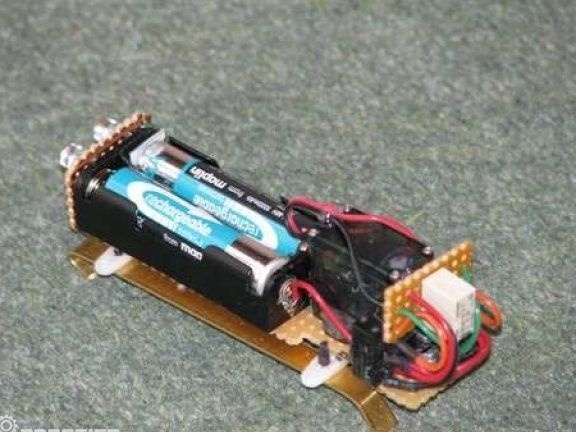
Carpet Crawler er en liten robot som tilhører BEAM-klassen. slik roboter inkluderer umiddelbart to slike elementer som estetikk, biologi, elektronikk og mekanikk. Takket være denne tilnærmingen etterligner slike roboter levende vesener så mye som mulig, noen ganger ser det ut til at de er i stand til å tenke.
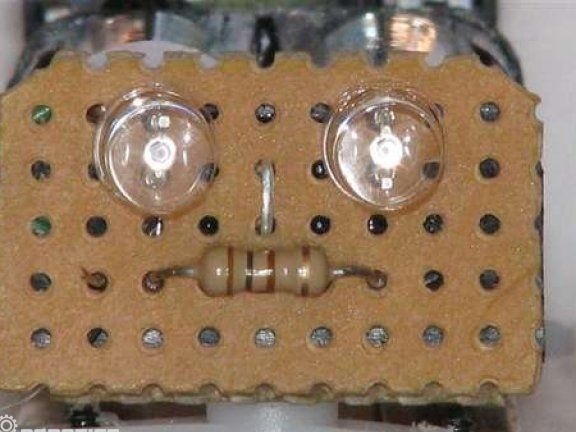
Som hjerne for slike roboter brukes stafetter sensorer og brytere som brukes og beveger seg hjemmelaget produkt på grunn av servomotoren. AAA-batterier brukes som strøm. Som øynene som brenner sterkt, er to lysdioder installert.
Materialer og verktøy for produksjon:
- messingstrimmel som måler 1/32 "x 1/4" x 8 ",
- to biter av kobberstrimler;
- M2 nøtter og roboter;
- servomotor (Micro RC (7,5 g));
- to mikrobrytere (kan fås fra gamle stasjoner);
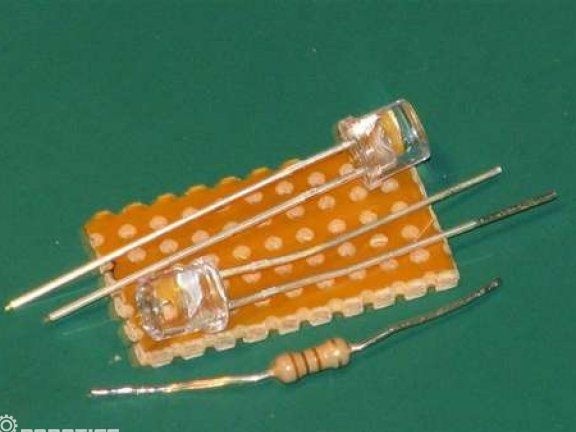
- to lysdioder (det er best å bruke rødt, fordi hvitt eller blått i dette tilfellet kan fungere);
- en 100R-motstand (hvis lysdiodene er gule eller grønne, så 47R);
- to AAA-batterier og en holder til dem;
- tynn ledning.




Produksjonsprosess:
Første trinn. Endring av servomotoren
Servomotoren er utformet på en slik måte at den under drift gjør impulsive bevegelser. I dette tilfellet må det gjøres om slik at det fungerer på rotasjon. Det er to måter å gjøre dette på.
I det første tilfellet kan du spare hastighet og retning fra motorstyring, så vel som kontrollelektronikk. Enheten vil fortsatt trenge innkommende pulser for å fungere.
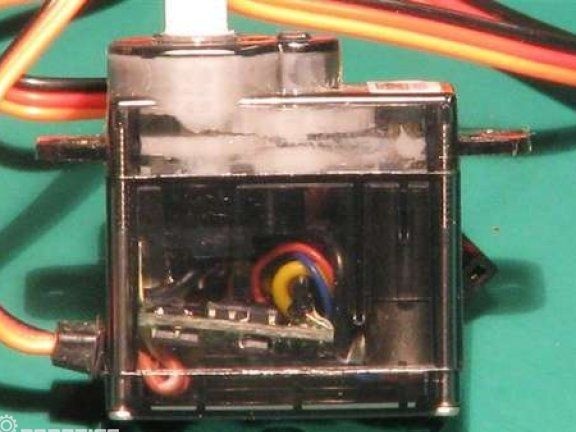
Forfatteren gikk den andre veien. Trenger å kutte av stoppelementet til girene. Da må tannhjulene føres opp, det vil være vanskelig å sette dem sammen igjen hvis sekvensen går tapt. Ved demontering må servomotorens overflate smøres med silikonfett.
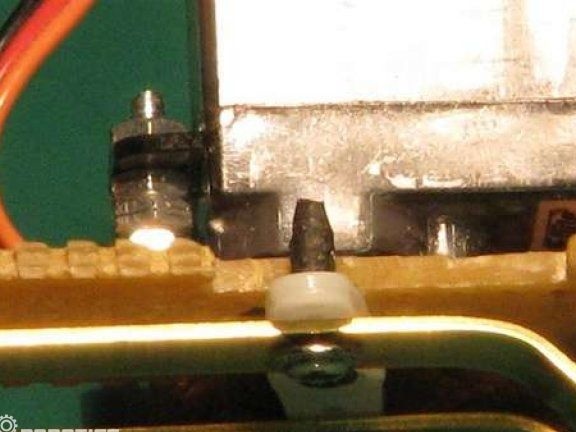
Bildet viser RSV-kontrollmekanismen som må flyttes.

Etter å ha fjernet brettet, må den røde ledningen skiftes til nøyaktig den røde ledningen til motoren. Ledninger bør pakkes forsiktig med elektrisk tape for å unngå kortslutning.

Trinn to Lag den mekaniske delen
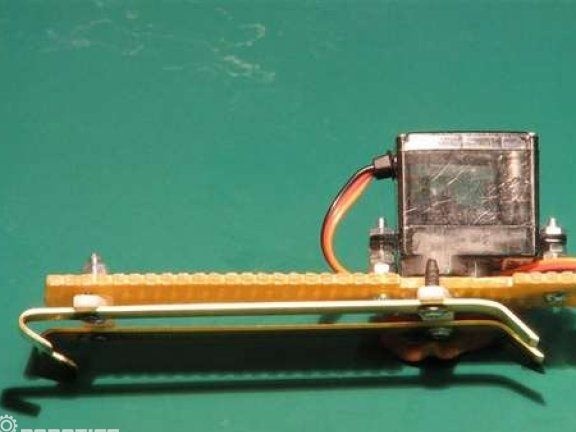
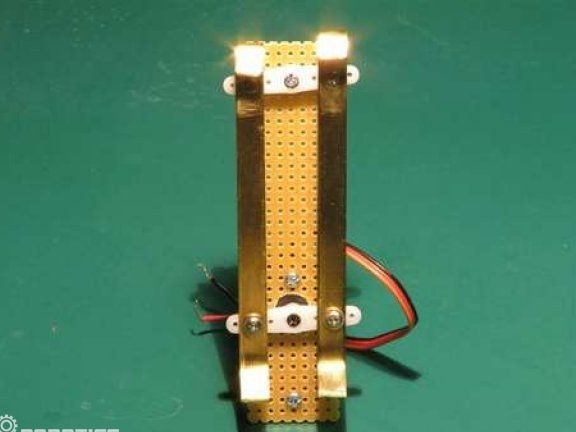
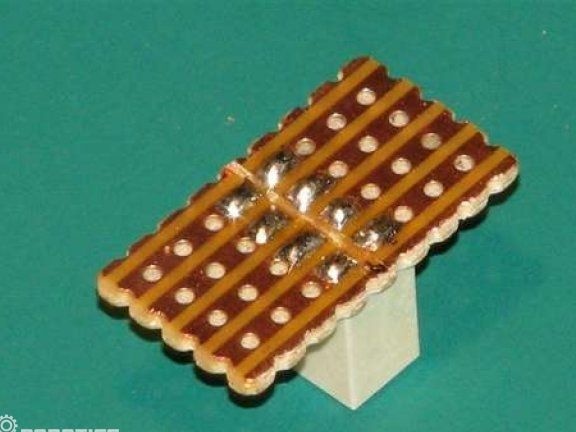
I arbeidsbordet må du bore flere hull og deretter installere reléet på baksiden av batteriet.For montering av servostasjonen brukes 2 mm bolter.
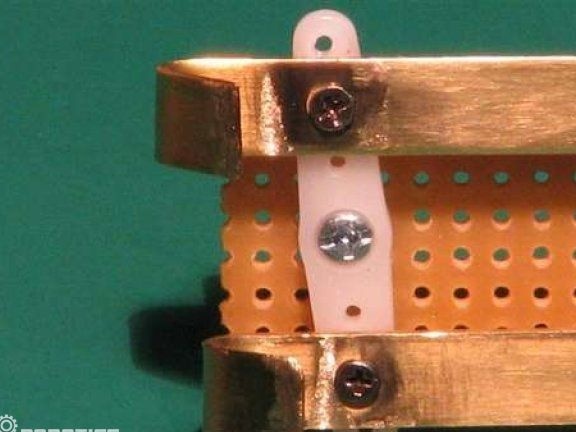
Beina til roboten er laget av solide kobberplater, for dette blir de først kuttet i biter av en gitt lengde og lager bøyninger. Takket være slike avbøyninger vil roboten klamre seg til veien og krype. Fest platen med små skruer.


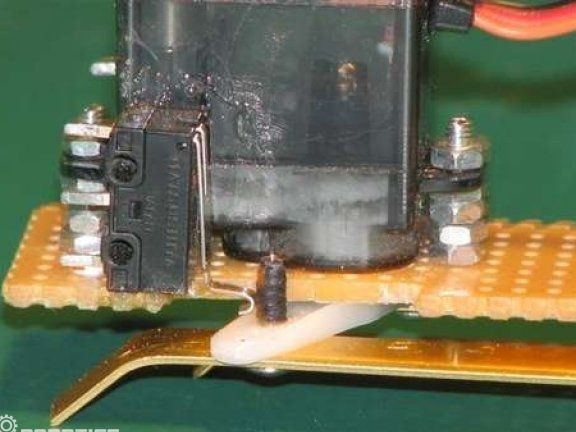
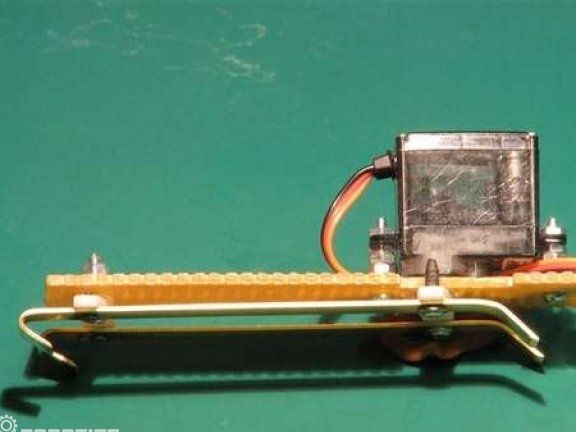
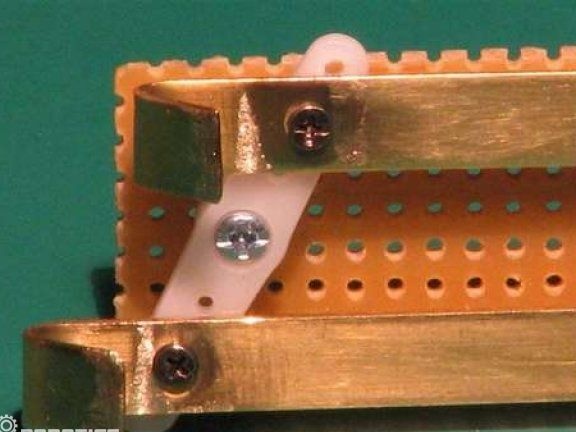
For å kontrollere bena må du stille bryterne. De er festet til servomotoren med lim.
Trinn tre Robot elektronisk krets
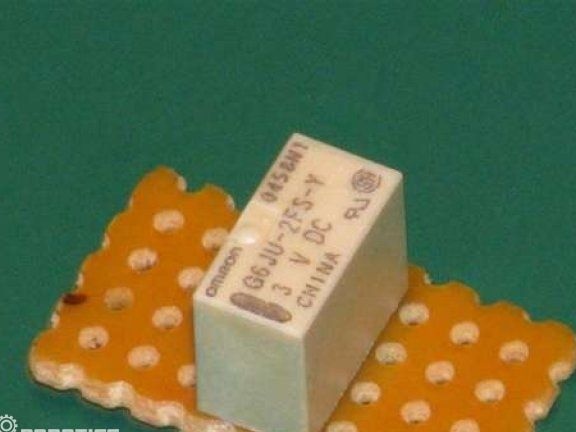
Hovedkomponenten i arbeidet med hjemmelaget kan betraktes som en relé-sperre, som vil fungere når den er koblet fra spolen. Reléet vil endre bevegelse, men det vil forbli på ett sted til neste sving.
Pulsene til spolene kommer fra to mikrobrytere, de slås på når antennens relé treffer bryteren.

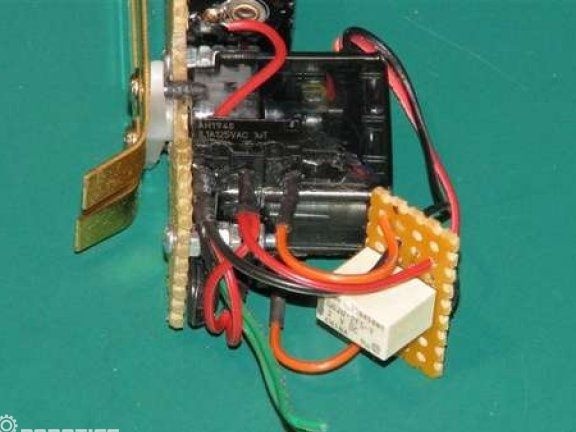
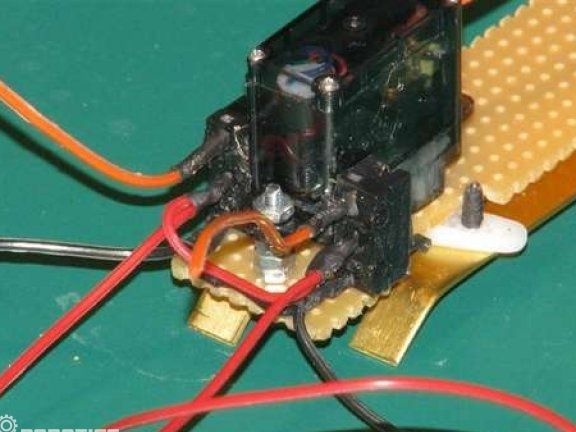
Trinn fire Montering av den elektroniske delen
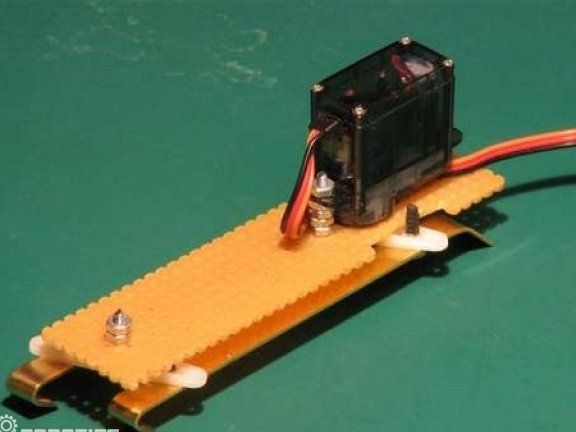
Reléet er montert på et skrap på en plate, så det er enklest å koble til. Hele prosessen med å koble elektronikk vises på bildet.





Det er alt, nå er roboten klar. Det beste av alt er at han vil synes seg selv på teppeflaten, da den er designet spesielt for slike steder. Først skal roboten lyse lysdiodene, og så kryper den sakte langs gulvet.