

Opprettelsen av prosjektet begynte i februar 2015. første roboten linjen til "Antei" var "Domovenok" - en robotbørste. Senere dukket opp "Antei 1".
Anteya-plattformen er et etui utstyrt med en kontroller Arduino Uno, sensorer og instrumenter for forskjellige funksjoner. Antei kan også bli en støvsuger, en husholdningskombinert, en vekterrobot, etc.
Men hovedtrekket i Antey er løsrivelsen av "maur" som beveger Antey.
Prinsippet for drift av vårt kompleks ble hentet fra naturen selv. Hver såkalte maur kan bevege seg uavhengig, men er også i stand til å utføre kollektivt arbeid. Samtidig klarer de ikke bare å løfte en belastning som er mye tyngre enn vekten, men vet også hvordan de kan flytte sammen utrolig store belastninger for dem.
Hver av mauren vår er utstyrt med en vibrasjonsmotor. Dette er en ganske uutforsket form for fremdrift. Fordelene er åpenbare. For det første er denne typen fremdrift mer økonomisk i energiforbruket. For det andre er den kompakt i motsetning til andre typer motorer, men den gir anstendig ytelse.
Vi fant ut at hver "maur" med en vekt på 8 gram. kan dra 89g., noe som indikerer at han er i stand til å bære vekt 11 ganger sin egen.
Siden etableringen av Antei har det vært et spørsmål om antall vibrasjonsmotorer, hvordan de er plassert på plattformen til roboten, og fra hva benene til maur (en tannbørste eller gummiben) skal lages. Mange alternativer har blitt prøvd.
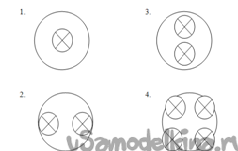
Men det ble bestemt å etablere 2 rader med 3-4 maur på gummiben på hver side av plattformen, mens de må være i en stiv kobling med hverandre.
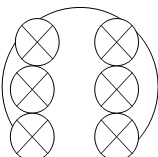
I denne utførelsesform oppnås en selvsikker fremoverbevegelse, og når visse motorer er slått av, utføres en sving til siden.


Vår Antey
