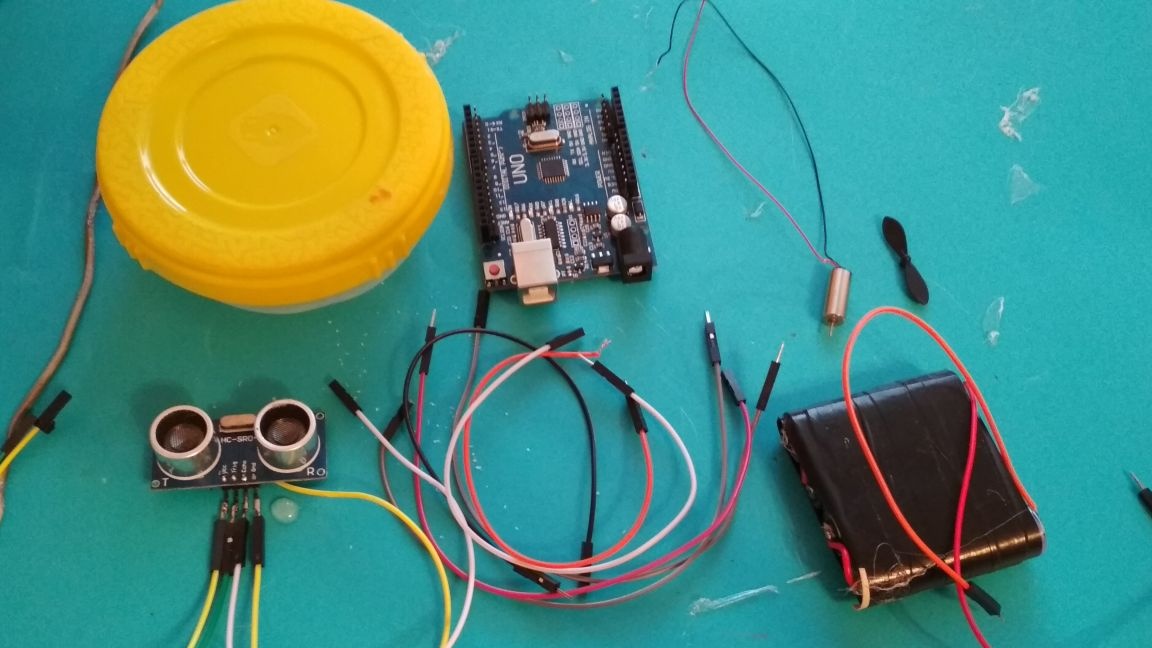
Og for en automatisk vifte vi trenger:
kle opp Arduino uno (tok her)
lavspent motor
-Papa-mamma type ledninger
- Konvensjonelle ledninger
-vyklyuchatel
-ultrazvukovoy
plastbeholder
- liten propell
- en bolt omtrent 5 cm lang og 1 cm bred
mutter å boltre seg
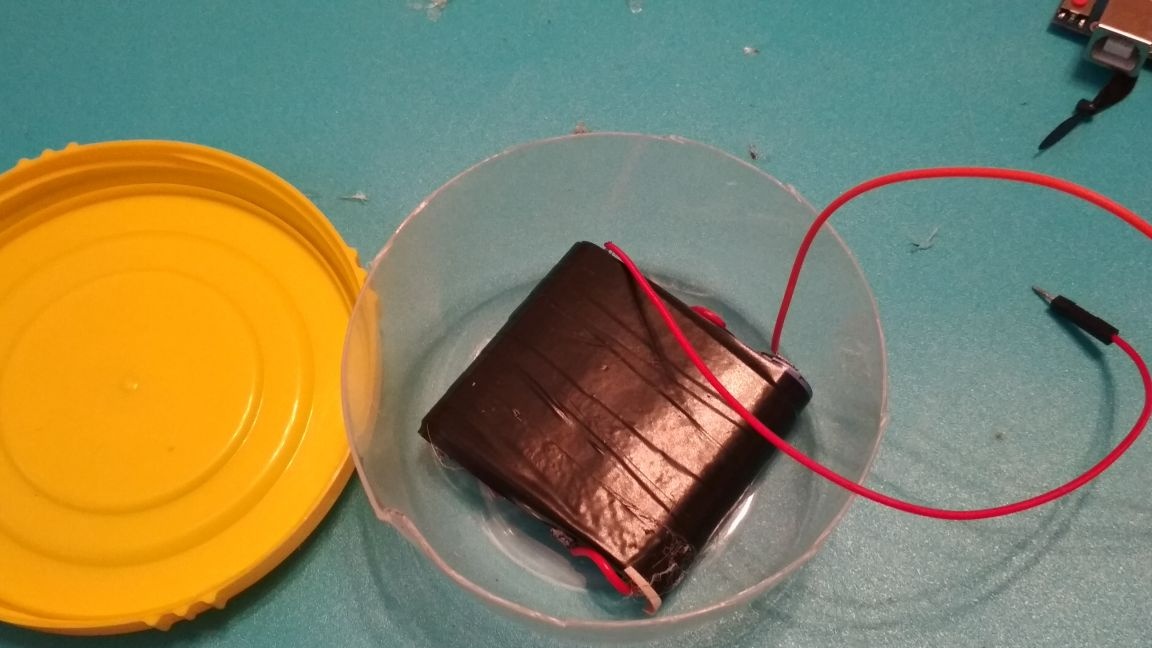
- 6-12 volt batteri (jeg bruker 4 1,5 V batterier koblet i serie som to mor til mor ledninger er loddet med morutgangen kuttet
tykk tråd
Fra verktøyene vi trenger:
loddejern
limpistol
kontorkniv
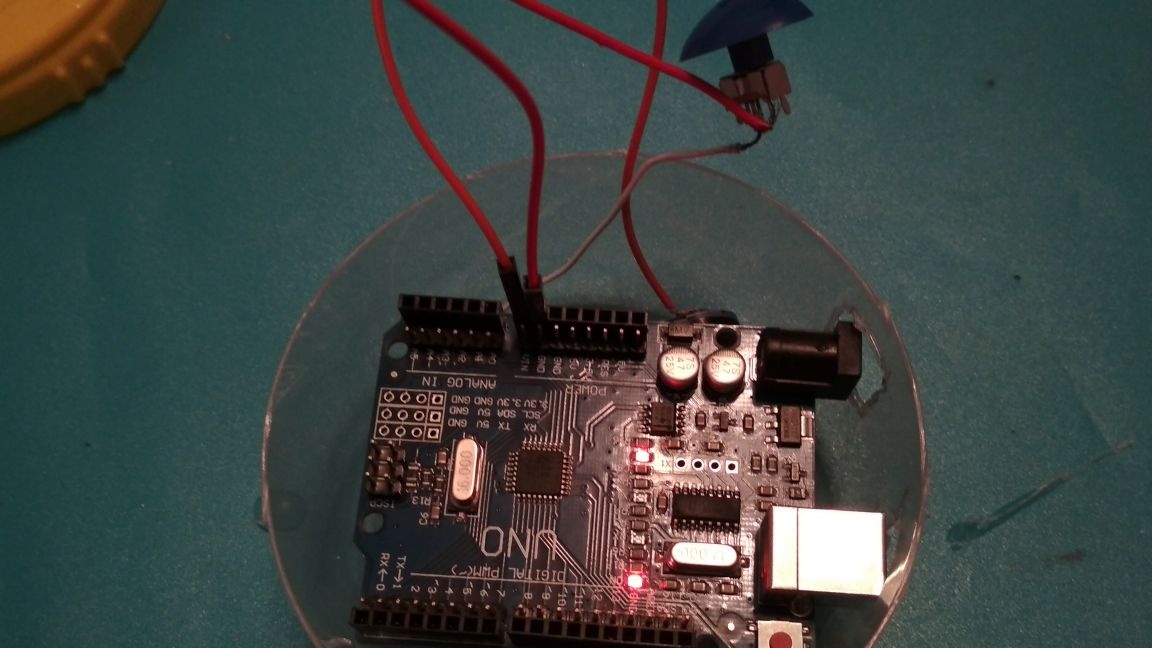
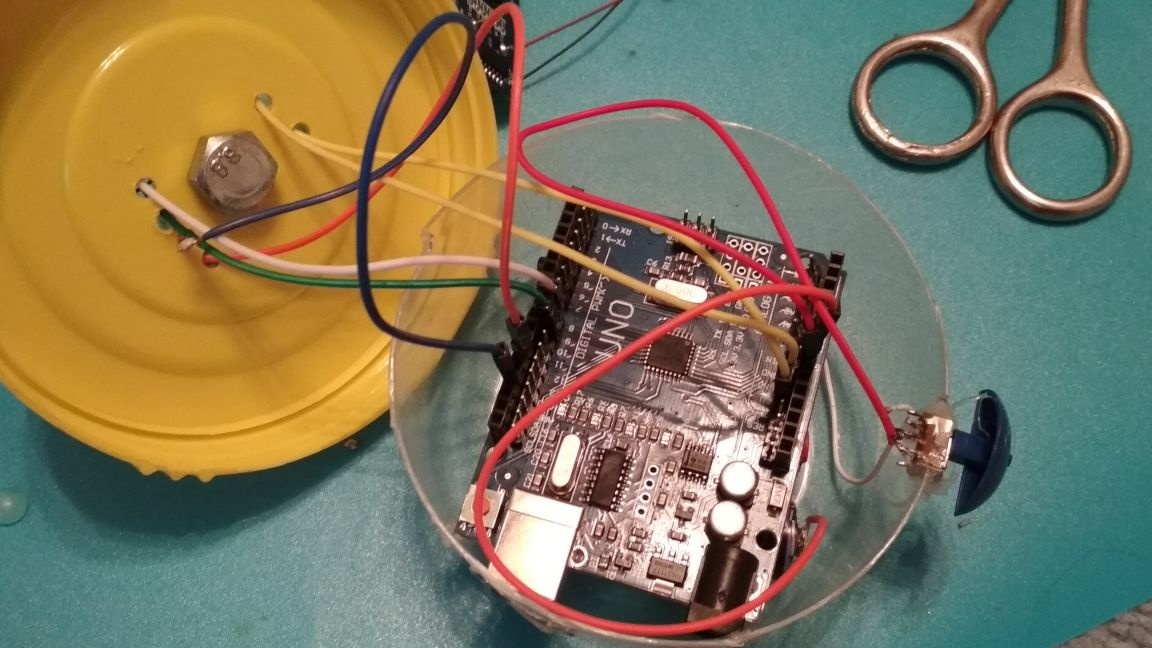
Og så, først og fremst tar vi strømkilden vår og legger den på bunnen av containeren (jeg bruker den 16-biters faste prisbeholderen jeg liker)
Så la vi Arduino Uno-styret på toppen:

Siden brettet kommer veldig ut, merker du 2 hull for kontaktene og kutter dem ut:

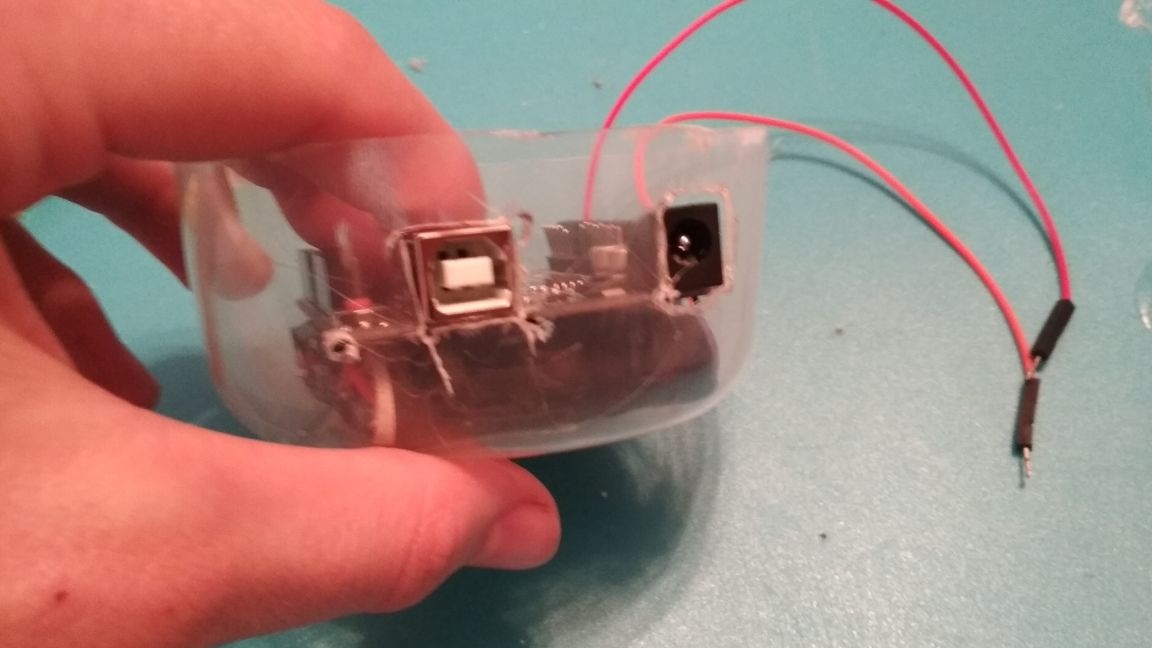
Legg til en bryter til strømkilden, og koble deretter plusseffekten til uin-utgangen på arduino, og minus til Gnd:
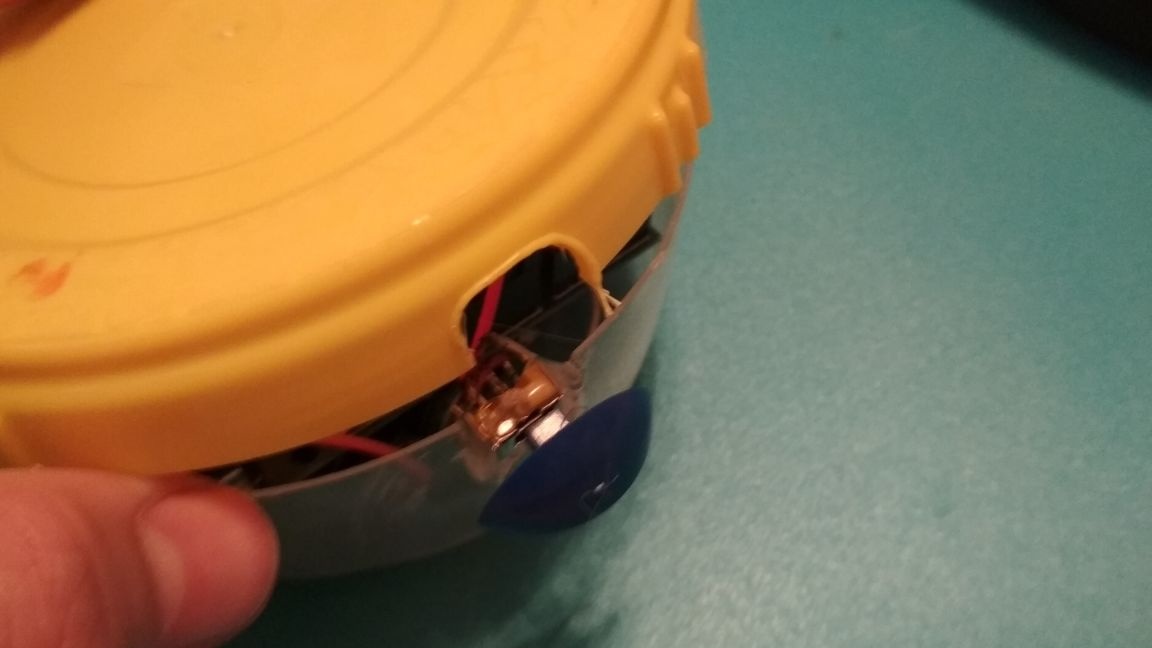
På siden av beholderen (også i lokket hvis nødvendig), lager du et spor for bryteren og limer det der:
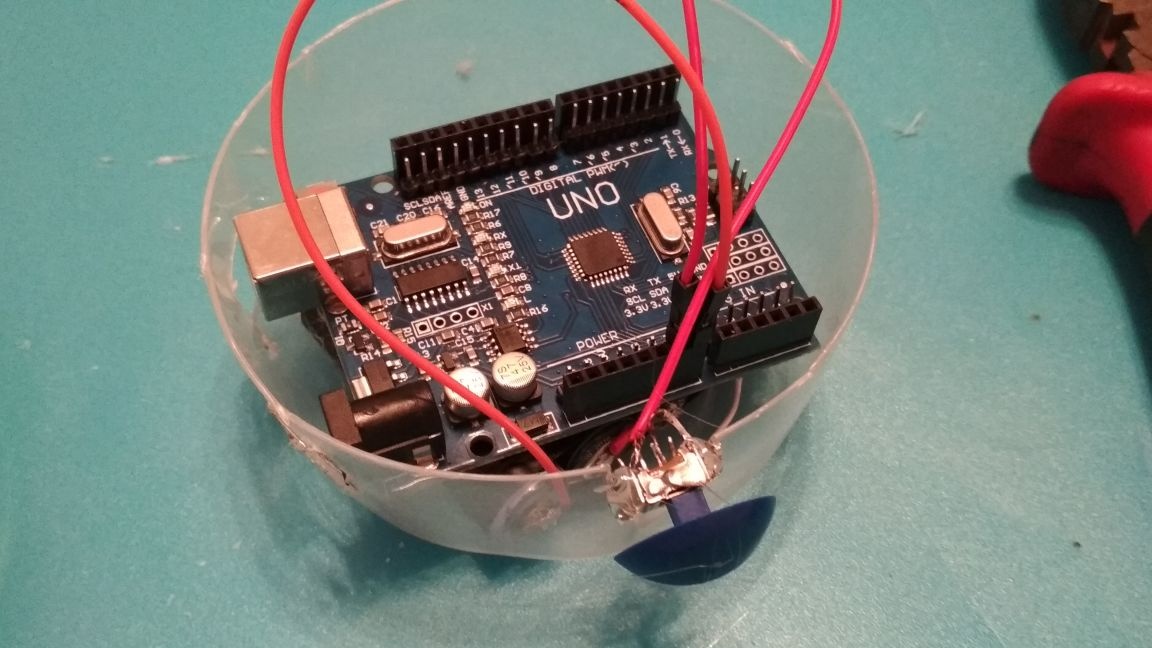
Hvis de røde lysdiodene på Arduino-kortet slås på når bryteren er slått på, koblet vi strømmen riktig.
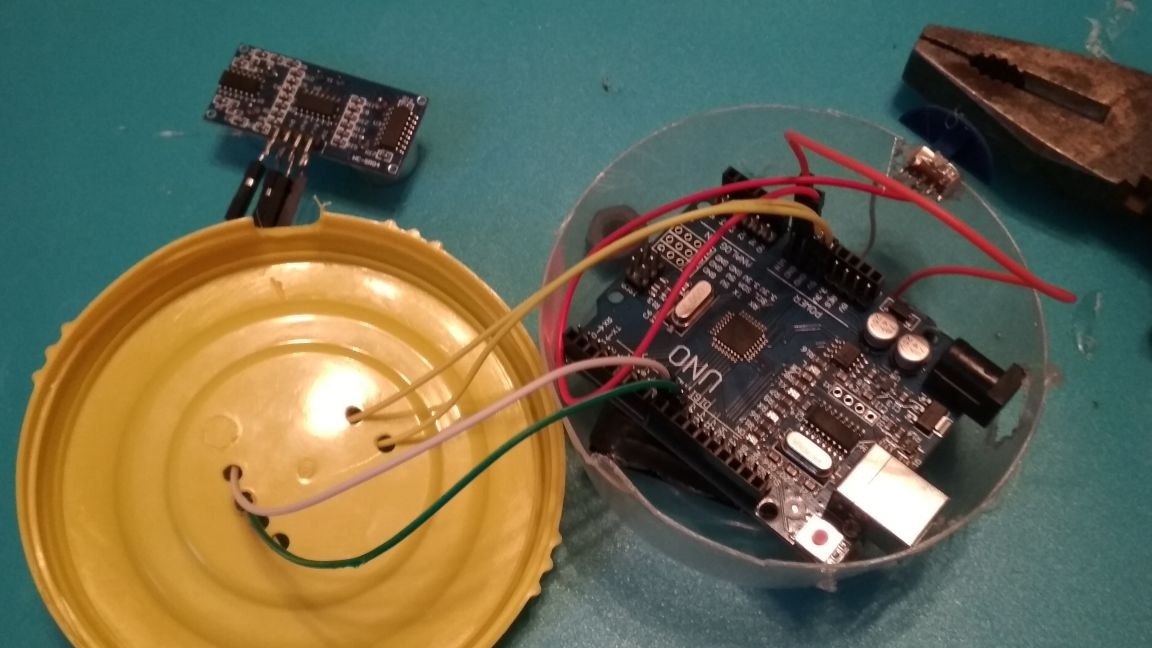
Vi tar en ultrasonisk rekkevidde finder og loddetinn til utgangene (vcc, Echo, Trig, Gnd) ledninger av pappa-mor type

I beholderlokket lager vi 6 små hull, 2-under ledningene til motoren, 4-under ledningene til ultralydsensoren:

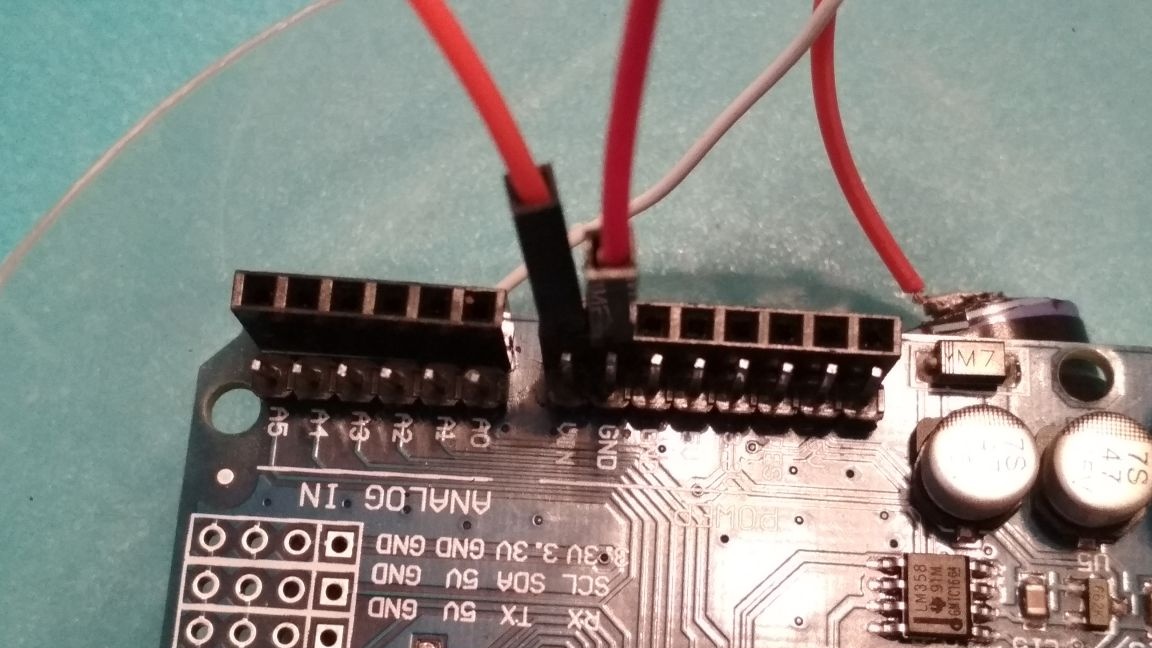
Vi fører ledningene fra sensoren gjennom hullene i lokket, og kobler dem som følger til arduino-brettet: vcc til utgangen 5 v, Gnd til Gnd, ekko til 9 digital pin, og trigg til 8
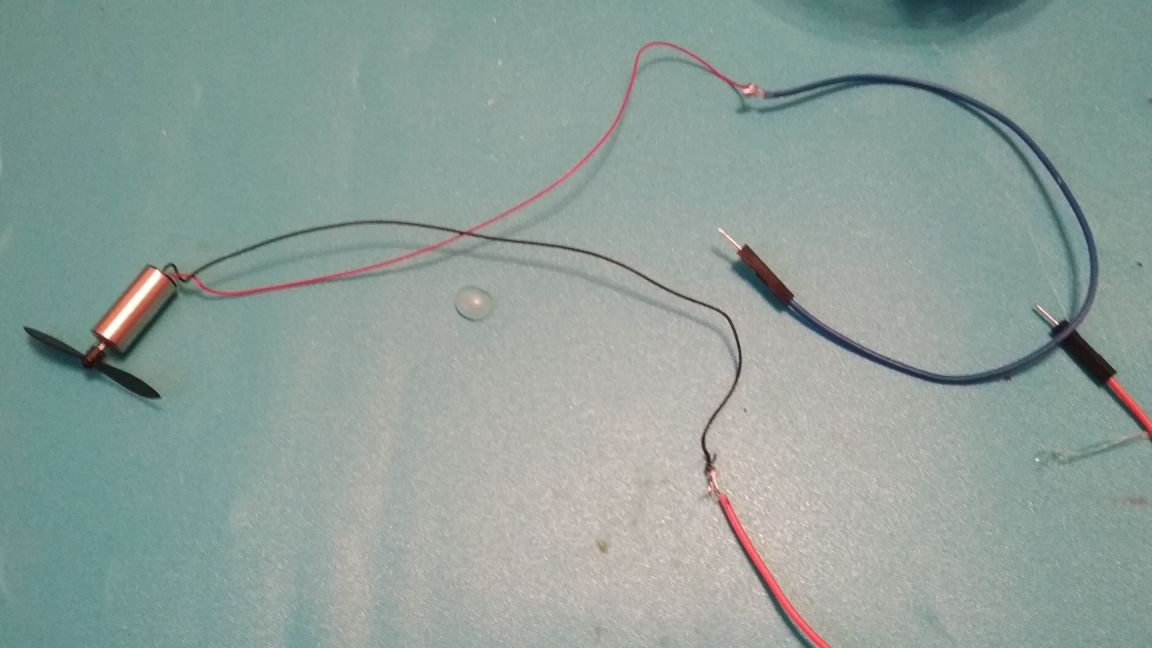
Vi setter en propell på motoraksen, jeg vil bruke en liten fabrikk, siden det ikke er noen annen, men det er bedre å bruke en større propell, eller til og med en hjemmelaget en:
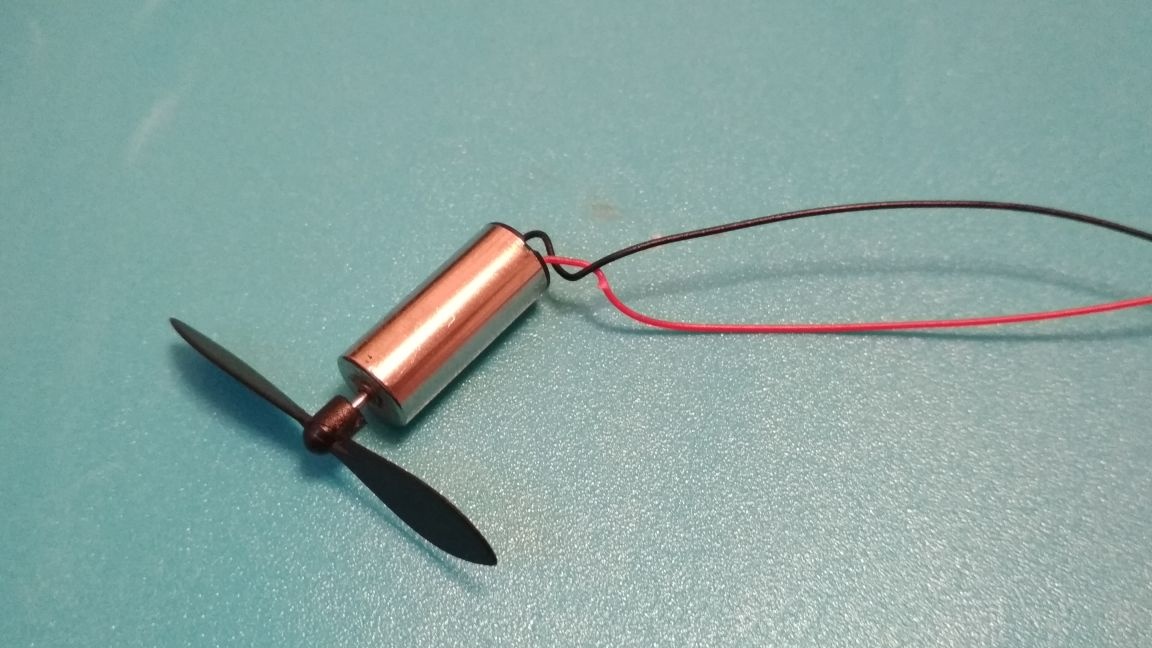
Lodde to pappa-til-mamma-ledninger til motoren med en forhåndsskåret utgang "mamma"
Før ledningene fra motoren gjennom de gjenværende hullene i dekselet:

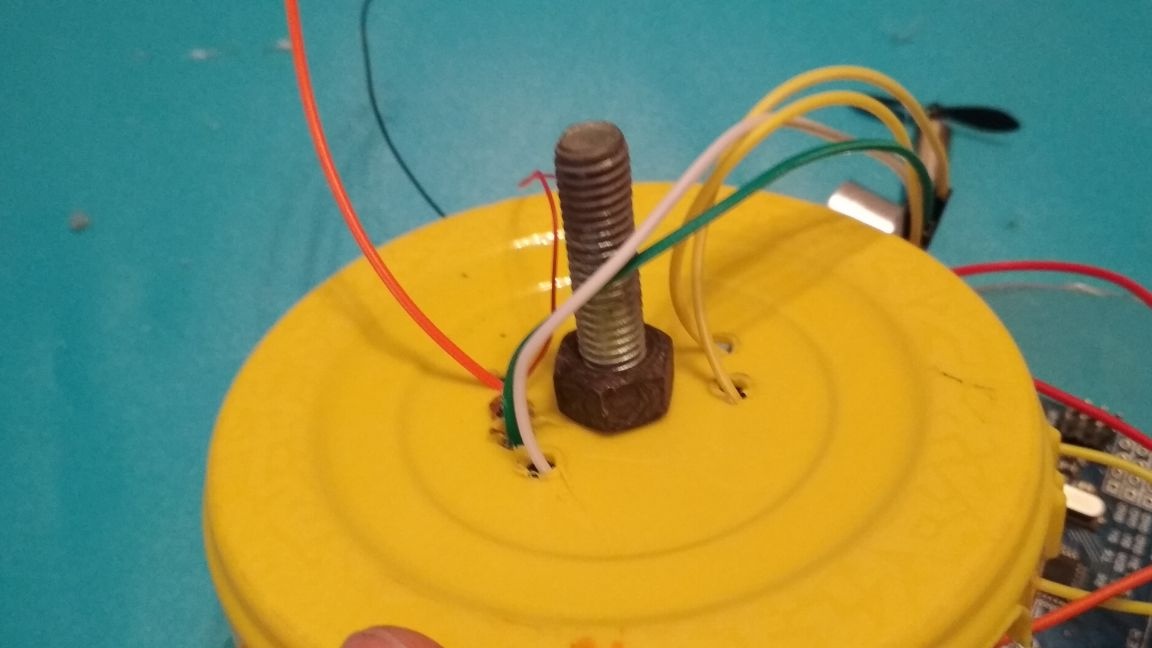
Vi tar en bolt med en mutter og ved hjelp av en forskjøvet bore eller et loddejern lager vi et hull i dekselet for boltens diameter:


Sett inn bolten nedenfra og opp og stram mutteren:
Vi kobler den ene ledningen fra motoren til Gnd-utgangen på arduino-brettet, og den andre til den 10. pinnen:
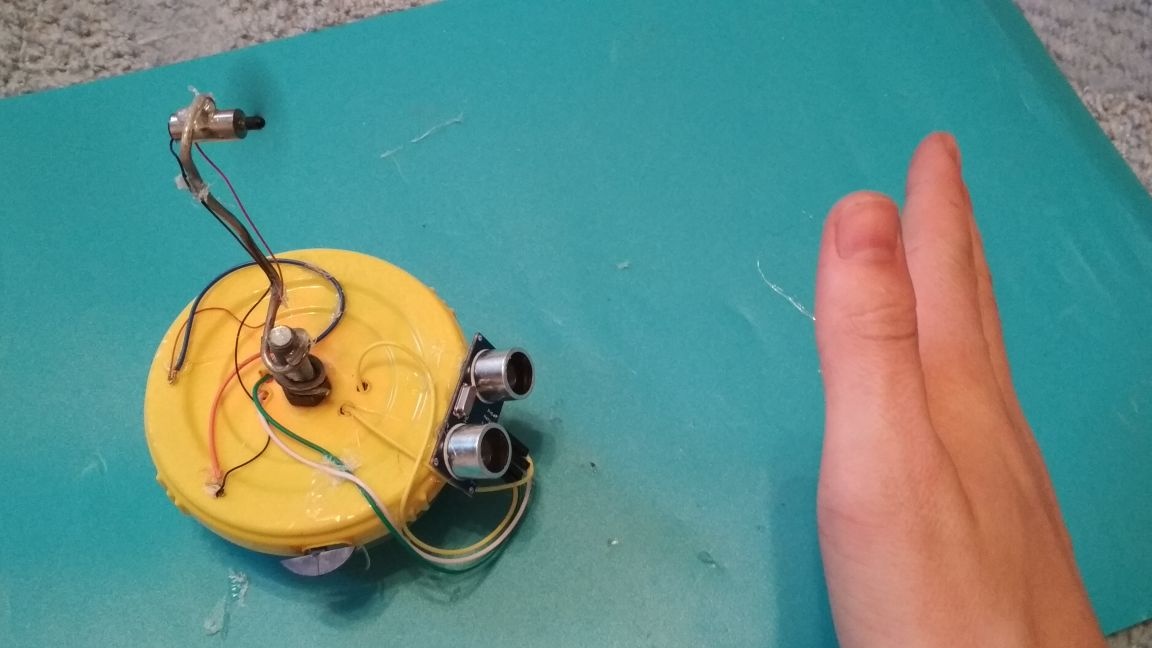
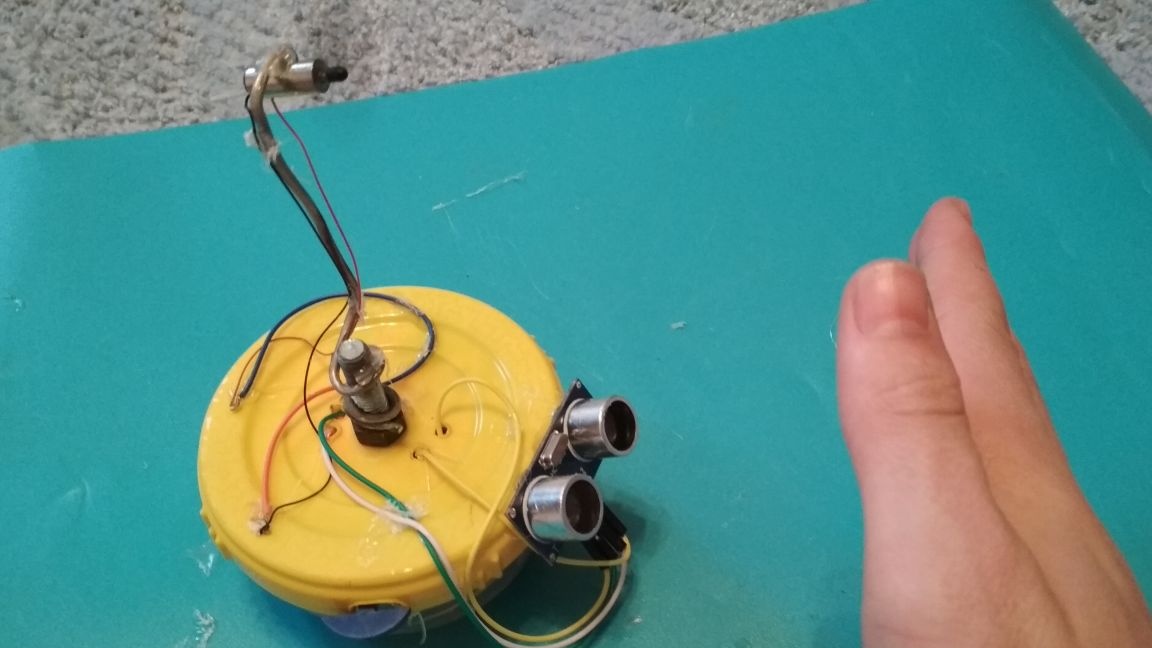
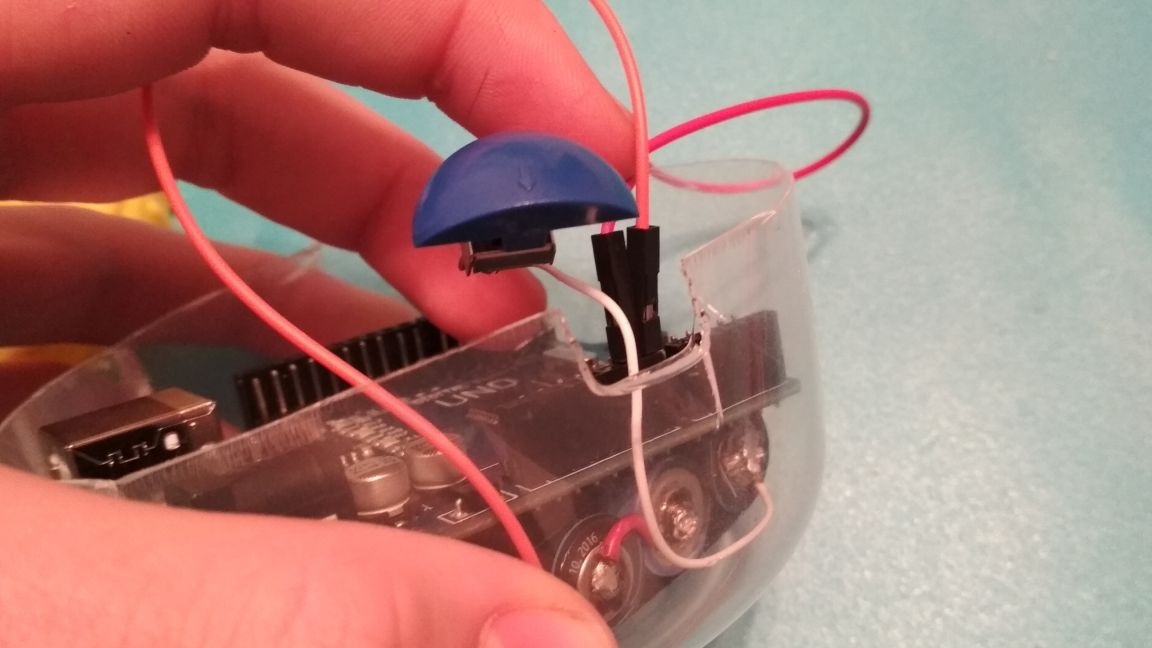
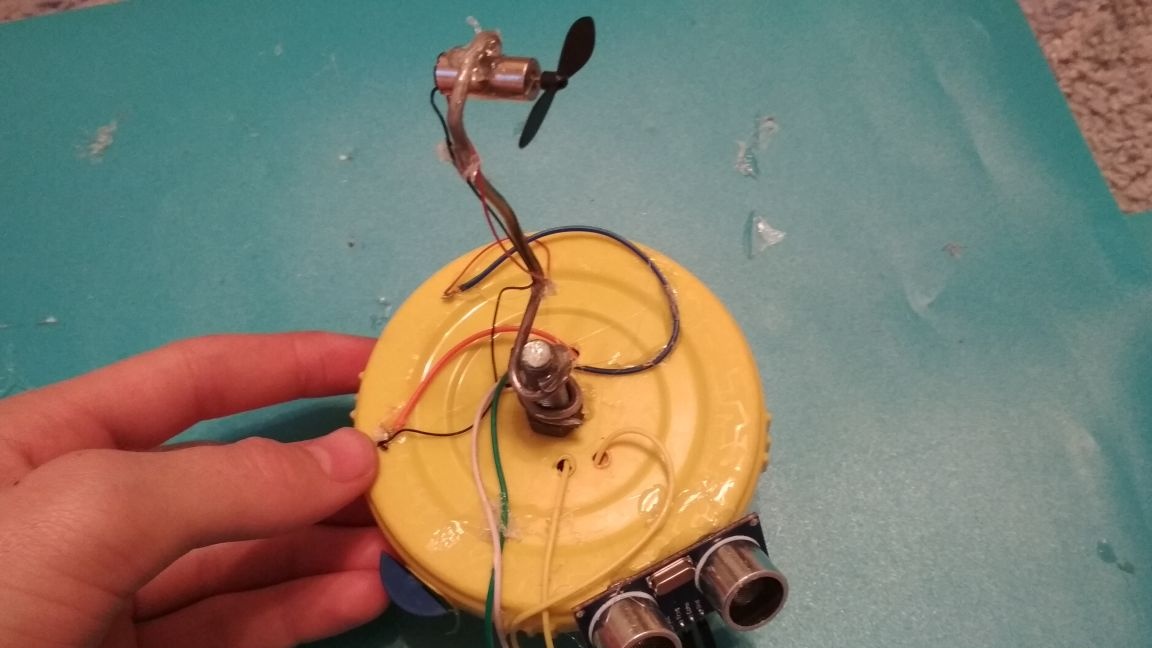
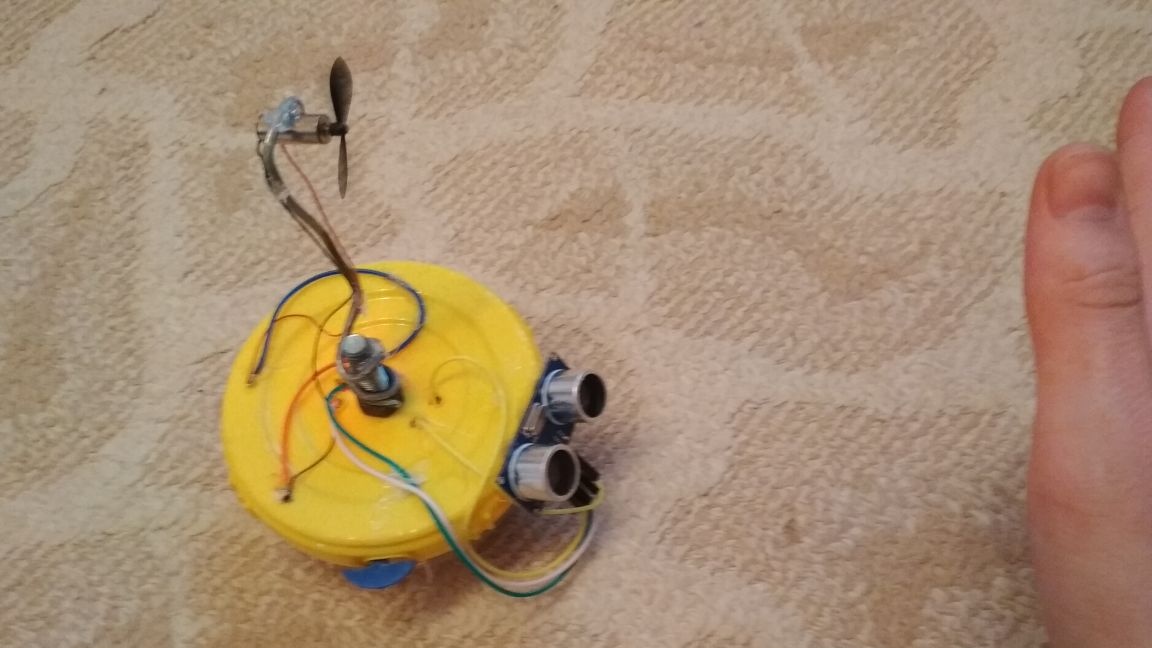
Vi legger på lokket og limer den ultralyds avstandsmåleren, som vist på bildet, limer også alle dinglende ledninger:
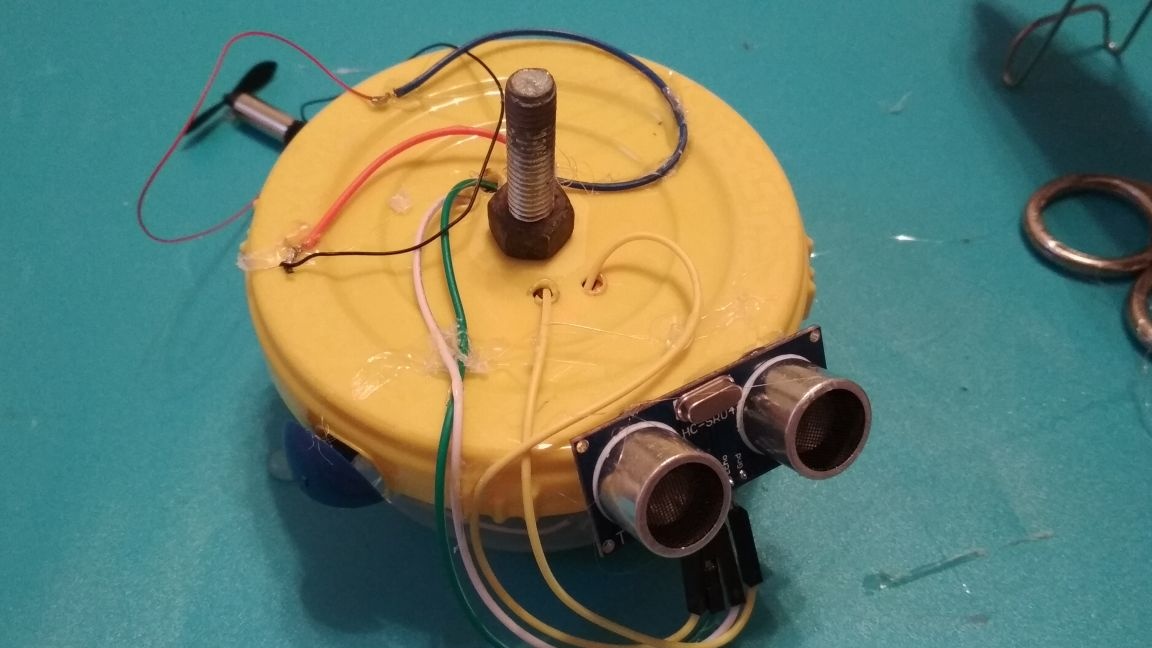
Vi slynger og limer en tykk ledning til bolten:
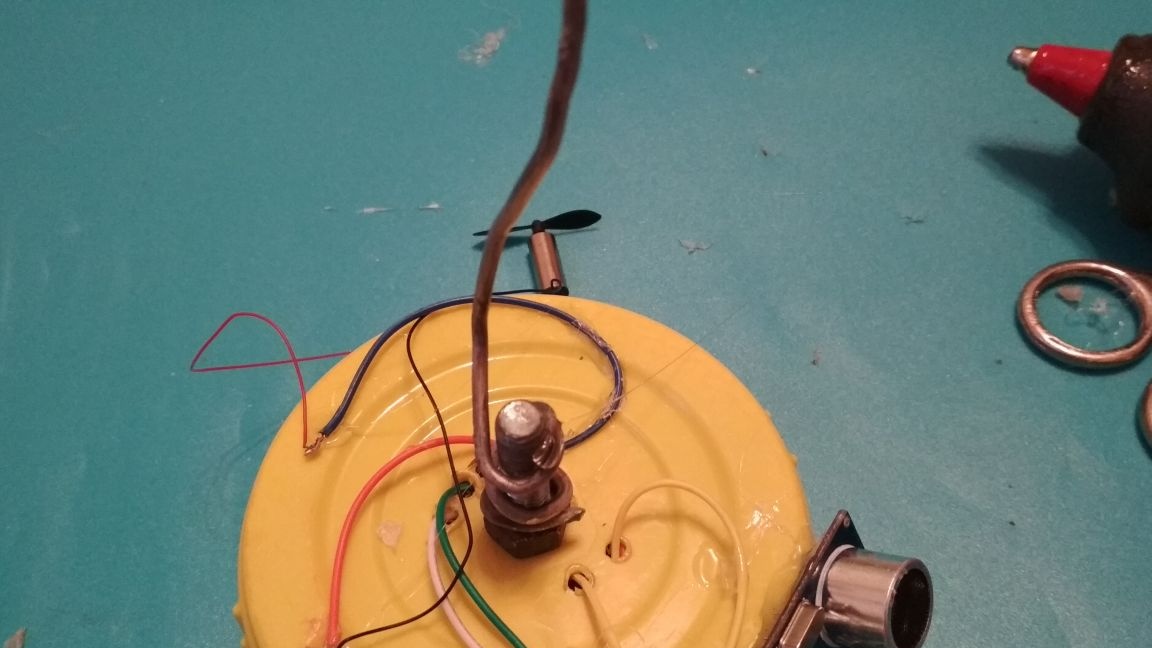
Vi fester motoren til toppen av ledningen, wiren vil fungere som en justerbar guide:
Nå er tiden kommet, for meg personlig det vanskeligste trinnet, eller rettere sagt å skrive firmware, du trenger ikke å skrive noe, bare starte Arduino IDE-applikasjonen, koble Arduino-brettet til datamaskinen ved hjelp av en spesiell adapter, som vanligvis følger med brettet, kopier skissen i Arduino IDE som er gitt nedenfor, i programmet klikker vi på "nedlasting" -knappen hvoretter skissen skal lastes på arduino-tavlen.

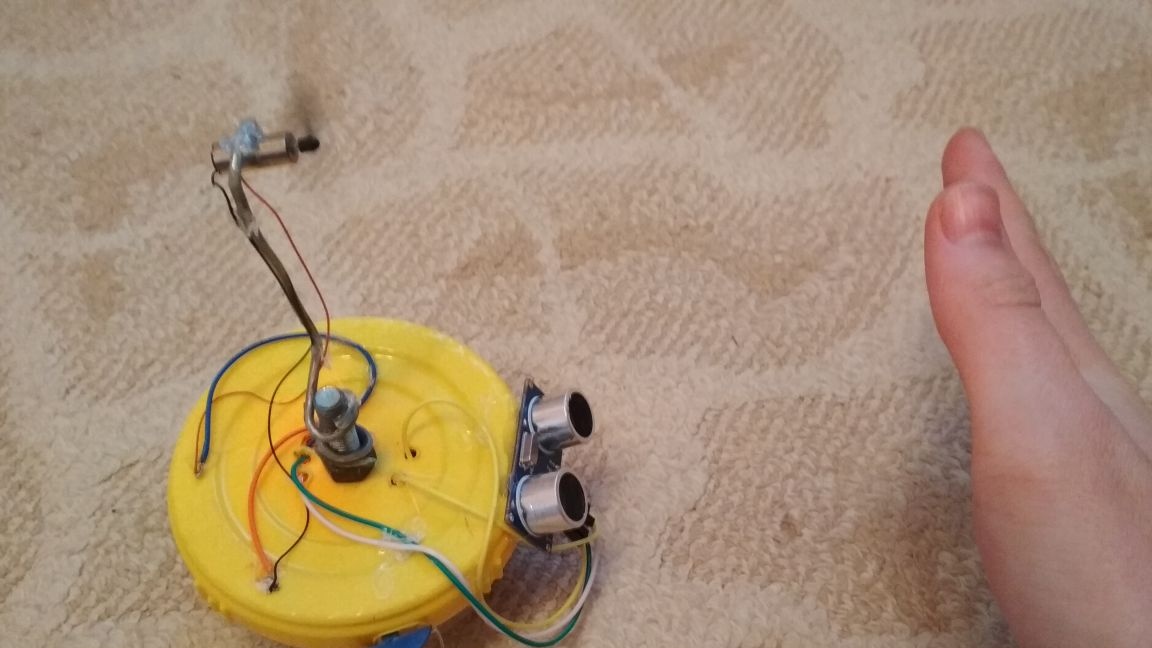
Hvis alt er gjort riktig, og når objektet bringes nærmere enn 20 cm til ultralydsensoren, bør propellen begynne å snurre. Vi kobler designen vår fra datamaskinen og tester enheten vår allerede fra strømkilden, for dette slår vi ganske enkelt bryteren fra av og på til tilstanden
Skisse (i denne skissen kalles motoren ordet ledet):
int echoPin = 9;
int trigPin = 8;
int led = 10;
ugyldig oppsett () {
Serial.begin (9600);
pinMode (trigPin, OUTPUT);
pinMode (echoPin, INPUT);
pinMode (ledet, UTGANG);
}
void loop () {
int varighet, cm;
digitalWrite (trigPin, LOW);
forsinkelse Mikrosekunder (2);
digitalWrite (trigPin, HIGH);
forsinkelse Mikrosekunder (10);
digitalWrite (trigPin, LOW);
varighet = pulseIn (echoPin, HIGH);
cm = (varighet / 58) +3;
Serial.print (cm);
Serial.println ("cm");
// forsinkelse (1000);
if (cm & lt; 20) {
digitalWrite (ledet, HØYT);
} annet {
digitalWrite (ledet, LAV);
}
forsinkelse (100);
}Vel, det er det! Vår automatiske eller smarte vifte er klar! Du tror kanskje ikke det, men selv en så liten propell blåser ganske bra i en avstand på 50 cm, men ideelt sett trenger du å bruke en større propell og en motor med et høyere antall omdreininger (jeg brukte lavspenning på grunn av det svært lave strømforbruket). Jeg håper dette hjemmelaget produkt nyttig for noen.