
Jeg vil bygge noe som en lett ATV eller lignende basert på mopedmotor.
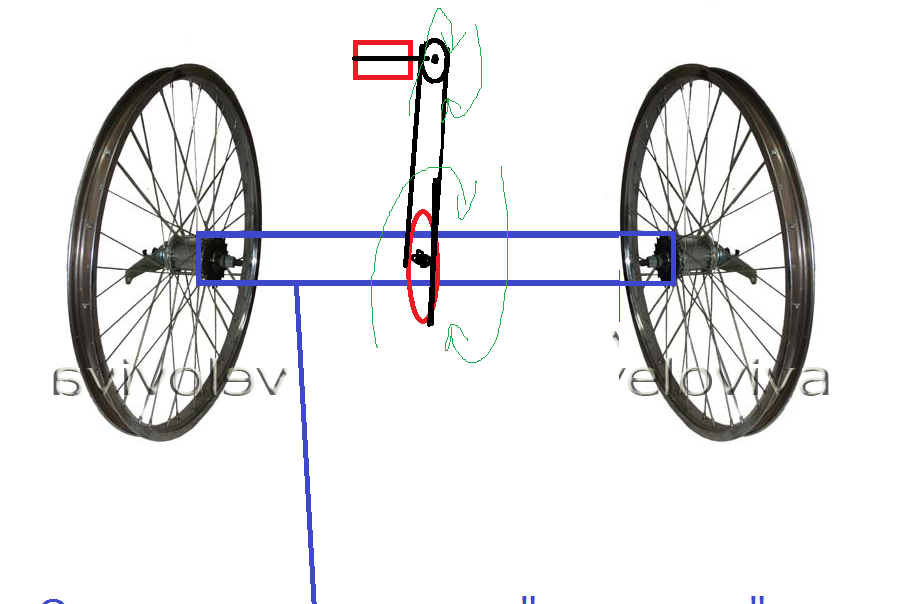
Jeg tenker hvordan jeg kan lage en analog av differensialen. Hva om du tar de to bakhjulene på sykkelen og sveiser akselen til "tannhjulene".
Teoretisk sett, når du kjører i en rett akse, vil aksen være låst av seg selv, og dette er kult, siden det vil være god langrennsevne, vil bare ett hjul ikke snurre i tilfelle fastkjøring.
Når du svinger (la oss si til venstre), vil høyre hjul "koble ut" fra aksen, da det gjør et større antall omdreininger, og venstre hjul vil overføre dreiemoment fra motoren. MEN! Det viser seg motsatt, dreiemomentet for en bedre sving vi trenger på høyre hjul.
Selv om det i dette tilfellet ikke vil være noen "bro-lås" og ATV-en bør dreie normalt?
Selv om du forestiller deg situasjonen at vi stoppet, snudde rattet og satte i gang, inntil bevegelsesøyeblikket øyeblikkelig trer i kraft, og når du kjører, kobles det fra. Generelt, som etter min mening, er ideen minst unik))