


God ettermiddag, i dag vil jeg dele instruksjoner for hvordan du lager en leketøysbeholder kontrollert av en Android-telefons akselerometer. Bunnen av tanken vil være laget av farget kryssfiner som er 3 mm tykk. Caterpillars og dual gear motor fra det kjente selskapet Tamiya. Produserer kvalitet og rimelige deler.
For tanken trenger vi:
- Tamiya 70168 dobbeltgir
- Tamiya 70100 sett med ruller og spor
- Tamiya 70157
- Kryssfiner 10 mm (et lite stykke)
- Arduino Pro Mini 5V AtMega 328
- DRV 8833
- Bluetooth-modul HC-06 eller tilsvarende
- USB-UART for Arduino firmware
- Rektangulære røde og grønne lysdioder
- Hvite lysdioder 5 mm 2stk.
- Motstand 3x 150 ohm
- Li-ion 18650 batterier
- Dupont-mamma-kontakter
- Ledninger i forskjellige farger
- lodde
- Rosin
- loddejern
- Bolter 3x40, 3x20, muttere og skiver til dem
- 2x10 treskruer
- Trebor 3 mm og 6 mm
- Elektrisk fretsag
- Akrylmaling
Trinn 1 Montering av girmotoren.
Jeg liker å bruke Tamiya girmotorer. De står akseptable, monteres enkelt. Tamiya 70168 har fire byggealternativer. Avhengig av ønsket girforhold og plassering av utgangsakselen.
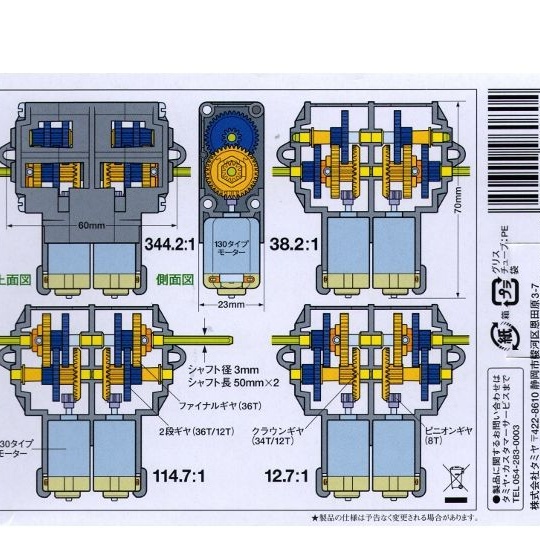
Detaljerte instruksjoner er inkludert i girkassen. Vi trenger at akselakslene skal være nærmere motorene, og girforholdet 114,7: 1. Vi velger alternativet vi trenger og samler alt i henhold til instruksjonene, bortsett fra å installere motorer. Det er mer praktisk å sette motorer senere, i tillegg må ledninger og kondensatorer loddes til dem før installasjon.
Trinn 2 Produksjon av kroppsdeler.
Kassen vil være laget av 3 mm tykk kryssfiner. Last ned følgende bilde og skriv det ut på A4-ark i en skala fra 102%.
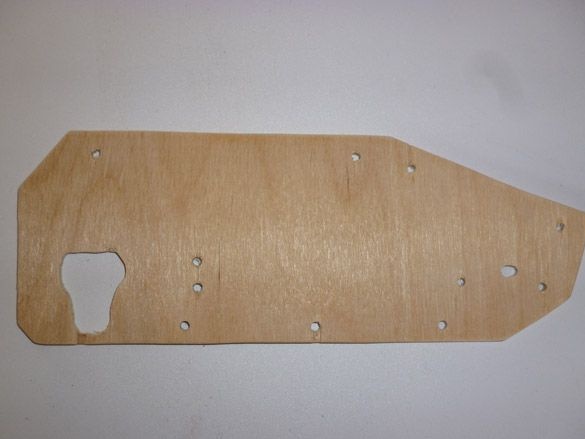
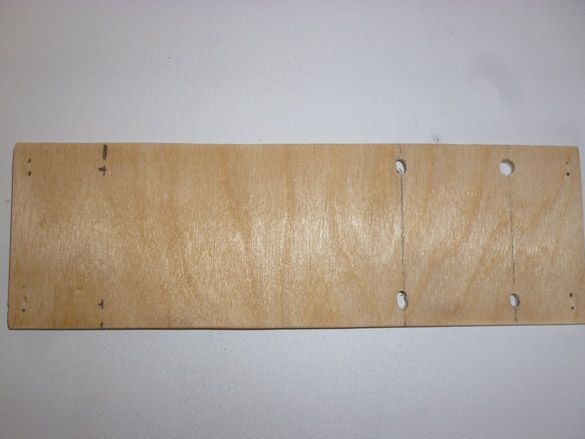
Nå tar vi to stykker kryssfiner av tilstrekkelig størrelse, legger den ene på den andre, bruker bildet vårt på toppen. Det skal lages 3 mm hull i områdene merket med et fet prikk. Slik at begge delene er like, borer vi først et ark og to kryssfiner på ett av punktene, setter inn en bolt der, og vri bildet og to kryssfiner. Så det andre hullet, og sett også inn en bolt der. Etter det borer vi resten. Vær oppmerksom på det venstre hullet, det er nødvendig å gi det en oval form. Dette er nødvendig for å kontrollere spenningen på sporene. Nå tar vi et stikksag, og klipper øyeblikkelig ut to sidedeler av saken, etter den dristige linjen på bildet. To slike detaljer skal vise seg:
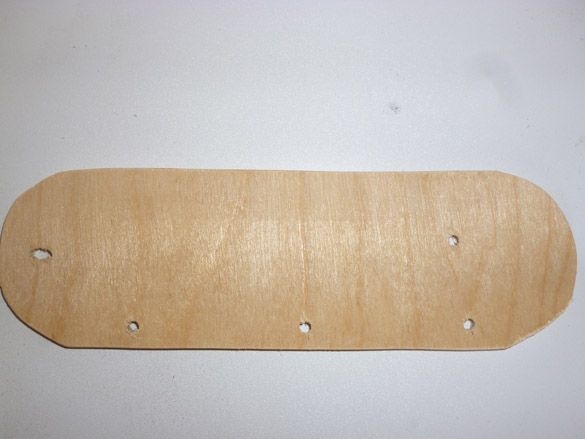
Deretter må du gjøre alt dette, bare denne gangen kutter vi ut to detaljer som dekker sporene. Det er nødvendig å kutte på den lille ovalen som er tegnet på bildet. Som et resultat får vi to detaljer:
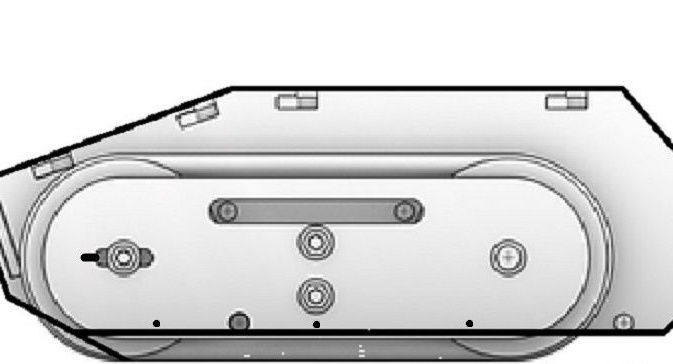
Nå tar vi et ark med kryssfiner i ett lag og kutter et rektangel med dimensjoner på 168 x 54 mm. Dette vil være bunnen av tanken vår og delen som girmotoren er festet til:
For å starte monteringen trenger vi alle detaljene beskrevet over:

Du kan legge igjen alle detaljene som de er, men jeg foretrekker å male dem. Akrylmaling er egnet for maling. Den tørker raskt og lukter ikke, noe som betyr at du kan male i ethvert rom uten frykt for forgiftning. Så, vi maler utklippsdetaljene:

Nå trenger vi 10 mm kryssfiner eller en passende trepinne. Det er nødvendig å kutte et rektangel som måler 54 x 15 mm og en tykkelse på 10 mm. Denne delen er nødvendig for å koble huset sammen. Etter å ha laget et rektangel, borer vi to hull i en avstand på 15 mm fra kanten, først med et 3 mm bor og deretter 6 mm, men ikke gjennom og gjennom, men bare halve dybden. Sett nøttene inn i de oppnådde hullene og fest dem med lim. Vi trenger fire slike detaljer:

Igjen tar vi 3 mm tykk kryssfiner. Skjær et rektangel 107 x 60 mm. Trekk 15 mm tilbake fra kantene på borehullet 3 mm, og dette vil være toppdekselet:

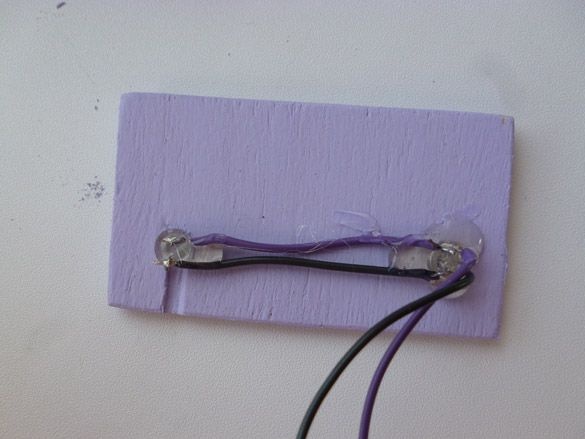
Vi klipper det neste rektanglet som måler 33 x 60 mm. Når vi støtter 15 mm fra kantene, borer vi to hull med en diameter på 5 mm. Klipper og stripper en del vi maler den. Deretter setter vi hvite 5-millimeter LED i hullene som er laget. Vi lodder dem parallelt og fikser ved hjelp av smeltlim:
Trinn 3 Montering av huset.
Etter å ha forberedt girmotoren og delene, fortsetter vi til montering av alt sammen. For å komme i gang, ta den nedre delen av saken og fest girmotoren til den:
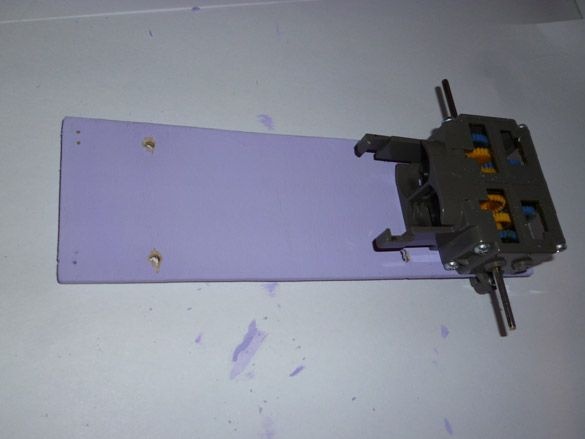
Og litt større:

Deretter fikser vi sidedelene, ved hjelp av hjørner fra en jernkonstruktør for barn og 3x20 mm bolter for dette:

Nå må vi installere sporene. Vi tar detaljene i lukkesporene. Vi setter inn 3x40 mm bolter i hullene. Vi satte et stort hjul på fremre bolt, på de tre nederste tre, så skiver og stram mutterne, men ikke stramme, slik at alle rullene snurrer fritt. Vi satte store tannhjul på akslene til girmotoren. Vi kombinerer alle bolter med ruller med hull på sidedelene. Etter å ha passert boltene, vikler vi og strammer mutterne fra innsiden av saken. Vi legger på sporene, sjekker om de er stramme nok. Larvene skal ikke synke, men for mye spenning vil skade dem. Justering utføres av forhjulet, beveger det eller omvendt, flytter det bort fra girmotoren. Etter alle manipulasjonene vi får:

Vi tar motorene som følger med ruller og spor. Vi lodder til ledningens kontaktputer, og parallelt med dem en 0,1 mikrofarad-kondensator. Etter det, installer motorene i girmotoren:

La oss gå videre til batteriene. Vi lodder Li-ion 18650-batteriene parallelt og sender ut ledningene for enkelhets skyld. Vri dem med elektrisk tape:

Vi plasserer dem nederst i saken, ved siden av motorene:

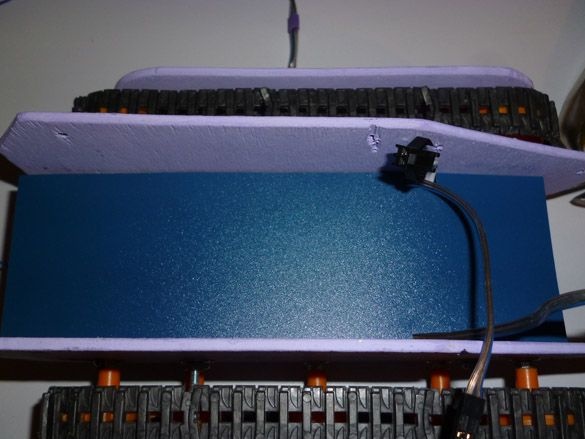
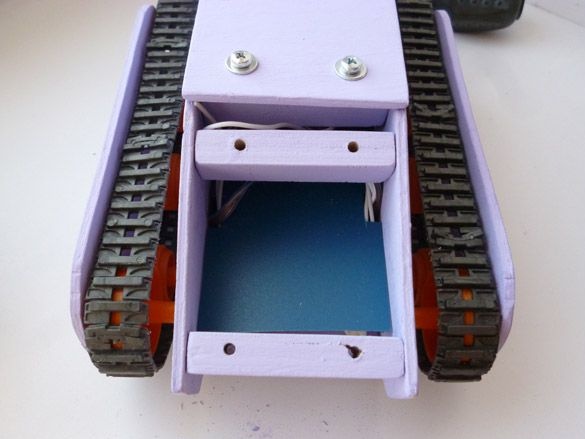
For enkelhets skyld, så vel som separasjon av mekanisk og elektronisk deler, kutt ut et rektangel på 100 x 54 mm fra tynn plast eller papp. Plasser den på toppen av girmotoren og batteriene:
Vi tar festemidler og installerer dem som vist på bildet. Vi fester til sidedelene ved hjelp av skruer:
På baksiden av tanken fester vi rektangulære lysdioder til varmt lim. Rødt og grønt:

Jeg bruker også varmt lim for å fikse den fremre delen med frontlyktene:

Trinn 4 Elektrisitet
Elektriske motorer forstyrrer driften, og det oppstår et spenningsfall under oppstart. Så at ved hver start av motorene Arduino ikke overbelaster, vil vi dele strømforsyningen. Arduino drives av et 9-volts batteri av kronetypen, og motorer fra batterier. Vi har allerede plassert batteriene, vi vil plassere kronen foran tanken:

Etter at du har satt inn batteriet, lukker du det med overdekselet:

Vi kobler alt sammen i henhold til ordningen:

Jeg vil forklare litt. Den venstre motoren gjennom driveren er koblet til 5 og 6 pinnen. Høyre - til 9 og 10. Pluss fra den røde LED gjennom motstanden til 3 pinner, minus til GND. Pluss fra den grønne LED-en, også gjennom motstanden, til 4-pinners. Forlykter til 2 pin.
Operasjonen av Bluetooth-modulen utføres gjennom SoftwareSerial-biblioteket.Vi bruker programvaren com-port. Tilkoblingskontakter kan endres i skissen. Vi kobler modulen som følger:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
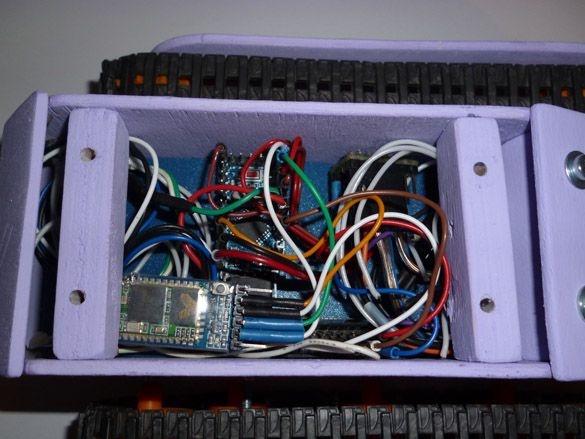
Ved å sette sammen alt sammen plasserer vi en elektriker i den sentrale delen:
Trinn 5-programvare.
For å jobbe med skissen, må du laste ned Arduino IDE. Vi fortsetter og laster ned den nyeste versjonen:
Da må du legge til biblioteket. SoftwareSerial skal allerede være i Arduino IDE. Men bare i tilfelle skal jeg legge det ut:
Hvis Arduino IDE, når du sammenstiller skissen, gir en feil og sverger ved det manglende biblioteket, pakker du ned det nedlastede arkivet i mappen “biblioteker” som ligger i mappen med Arduino IDE installert.
Trinn 6 Forbered Bluetooth-modulen.
Standardinnstillingene for Bluetooth-modulen er forskjellige fra det vi trenger. Derfor må du først etablere forbindelsen til Bluetooth-modulen med datamaskinen og endre innstillingene. Fyll Send_ AT_Bluetooth-skissen inn i Arduino:
Arduino vil fungere som en kobling mellom Bluetooth og datamaskinen. Start Arduino IDE, åpne Port Monitor. For HC-06, velg 9600 i portmonitorinnstillingene, NL og CR er ikke nødvendig. Hvis det ikke er opprettet en Bluetooth-tilkobling med modulen, er den i AT-kommandoinngangsmodus. Kanskje første gang modulen ikke svarer. Prøv deretter å overbelaste den ved å koble fra og koble til plussledningen på nytt. Alle kommandoer legges inn uten anførselstegn, ikke glem å trykke enter for å sende. Vi skriver inn følgende kommandoer:
"AT" - uten anførselstegn, skulle svaret "OK" komme.
“AT + NAVN
“AT + BAUD7” - still hastigheten til 57600.
“AT + RESET” - vi overbelaster modulen.
Hvis noe gikk galt, eller ikke husker innstillingene:
“AT + ORGL” - returner modulen til fabrikkinnstillingene.
Trinn 7 Fyll skissen.
Etter å ha satt opp Bluetooth-modulen, fortsett å fylle ut hovedskissen:
Trinn 8 Forbered din Android-telefon.
Forsikre deg om at Android-telefonen eller nettbrettet ditt har et akselerometer før bruk. For å komme i gang, legger du til en Bluetooth-enhets-tanchka i Android. Vi går inn på Bluetooth-innstillingene, finner Bluetooth-modulen du har navngitt og kobler til. Passordet for tilkoblingen er “1234” eller “0000”, det kan være forskjellig for forskjellige modeller. Installer nå kontrollprogrammet. Vi trenger en Arduino Bluetooth RC-bil eller BT-kontroller. Begge programmene er gratis, de har muligheten til å kontrollere Bku Bluetooth-enheten gjennom akselerometeret, og de er i Google Play. Last ned programmet du liker på telefonen eller nettbrettet. Skriv inn følgende kommandoer i programinnstillingsmenyen:
W - fremover
S - tilbake
A - venstre
D - riktig
F eller G– stopp
K - frontlykter
L - hodelykt av
Du kan også bruke styrespaken til å kontrollere tanken. Den kan lages i henhold til min andre bruksanvisning.
Og legg til en Bluetooth-modul til den, etter en annen bruksanvisning.

