


God ettermiddag, jeg vil dele instruksjoner om elektrifisering av modellen for liming i 1/35 skala Tamiya 35163 JGSDF TYPE 61 TANK. For bevegelse vil vi bruke den dobbelte girkassen Tamiya 70097, og som kontroller ESP 8266-12E. Wi-Fi-kontroll ved hjelp av et nett-shell.
Vi trenger:
- Tamiya 35163 JGSDF TYPE 61 TANK (1:35)
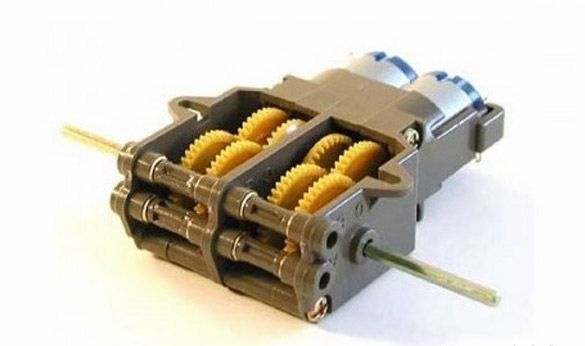
- Tamiya 70097 Twin-Motor Gearbox Kit Redutcor Motor
- TAMIYA Lim av sementmodell
- ESP 8266 -12E eller ESP 8266 -12F
- AMS 1117 3.3v 800mA - spenningsstabilisator
- Qifei L9110 motorfører
- Kondensator 10v 1000uF
- Åpent rom for to AAA-batterier
- 4 AAA-batterier eller 4 AAA 1,2V 1000mA NI-MN-batterier
- 2 ohm motstand 2 stk.
- Motstand 10 kOhm 6 stk.
- Knapp
- bytte
- USB - TTL
- kretskort
- loddejern
- flerfargede ledninger
Trinn 1 Hus og mekanikk.
Først av alt, må vi lim vår modellen Tamiya 35163. Åpne boksen:
Begynn med å ekstrudere modelldetaljer. De utstikkende delene eller restene av rammen skal kuttes med en kniv eller rengjøres med sandpapir. Vi monterer den nedre delen av karosseriet i henhold til instruksjonene, du skal ikke bare lime delene for montering av drivhjulene. Jeg har akkurat brukt disse detaljene for å ta et bilde:

På baksiden ser det slik ut:

Vær forsiktig så du ikke lim hjulfestene med lim, alle hjul skal spinne fritt. Larvene i krysset bør også limes sammen. Etter montering av chassiset er det bedre å la det tørke grundig før du gjør ytterligere handlinger:

Lim inn toppen mens chassiset tørker. Først grunnlaget. Det er mange små deler, det er bedre å bruke pinsett for liming av slike deler. Limbase:

Vi samler tårnet. To alternativer er tilgjengelige for tårnet. Forskjellen ligger i detaljene om montering av tønne på tårnet. Det første alternativet er et standardfeste, det andre med støvbeskyttelse. Det er verdt å velge hvilken du liker best. Denne forskjellen gjenspeiles bare i utseende. Han limte modellen på nyttårsferien, så han kledde ut tanken også:

Sett sammen og la tørke:

Mens modellen tørker, la oss gå videre til å montere girmotoren. Vi vil bruke en girmotor og motorer produsert av samme selskap som modellen, nemlig Tamiya 70097:
Instruksjonen som følger med settet har ikke det russiske språket, men det er allerede forståelig.To monteringsalternativer er beskrevet der i detalj:
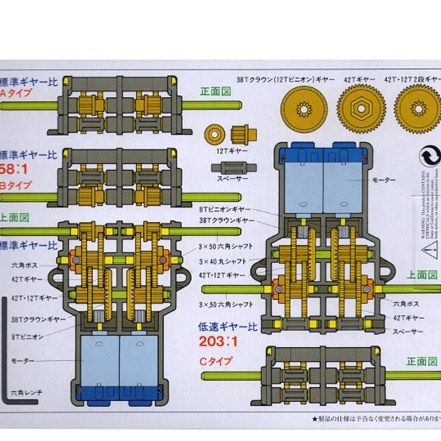
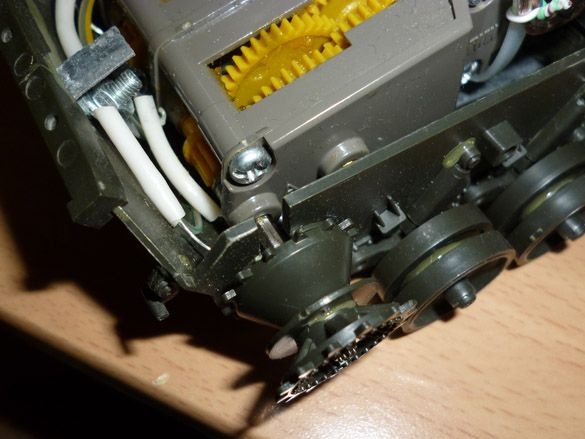
I det første tilfellet er girforholdet 58: 1, det andre - 203: 1. Vi bruker det første alternativet. Utgangsakslene til girkassen skal føres gjennom sentrale hull. Sideøyene på girkassen skal kuttes, de vil forstyrre installasjonen på modellen. Ellers er girkassen ganske enkel å ta på modellen. Så legger vi små gir på motorene og setter dem inn i girkassen. For hver av motorene skal en motstand på 2 ohm loddes til en av kontaktene. Vi lodder en ledning til motstanden, og den andre ledningen til motorens andre kontakt. Etter å ha installert motorene, satte vi den monterte girmotoren på modellen. Fest med lim.
Vi kjører også drivhjulene til utgangsakslene.
Fremtidsplaner inkluderer å legge turretrotasjonsfunksjonen og eventuelt skyte våpen. I instruksjonene nedenfor vil jeg prøve å beskrive disse endringene.
Trinn 2 Elektrifisering.
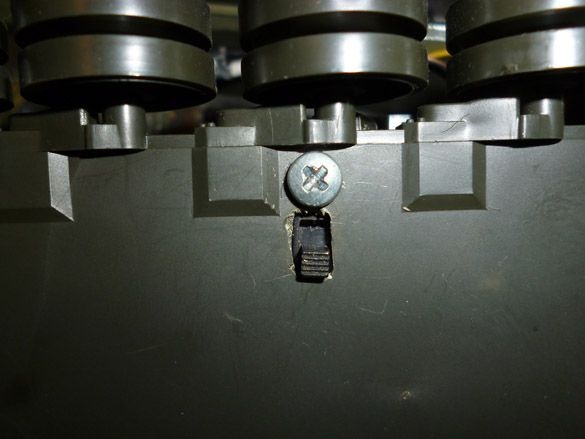
Etter å ha samlet modellen, og ventet på fullstendig tørking, gå til elektronisk stuffing. I den nedre delen kuttet vi i bryteren:
To batterirom er loddet i serie og limt sammen. Vi sender også ut en praktisk kontakt på enden av ledningene.

For å drive modellen kan du bruke AAA-batterier (“små”) eller Ni-Mn 1,2 volt AAA-batterier.
Ta ESP8266. Dette er en liten, men ganske funksjonell modul, og den innebygde Wi-Fi-modulen gir tilkobling til hjem Wi-fi-nettverk. Jeg anbefaler å velge en modul med 4 Mb minne. For å kjøre og blinke ESP-8266 ESP, må du sette sammen en minste binding. Modulen drives av 3,3 volt. Den kan ikke kobles direkte til en ustabilisert strømkilde. Derfor inkluderer vi i kretsen en spenningsstabilisator AMS 1117 3.3v. VCC-pinnen er koblet direkte til den positive strømforsyningskabelen fra stabilisatoren, og de gjenværende pinnene: CH_PD, RESET, GPIO0, GPIO2, må kobles til gjennom en motstand, det vil si trukket til strømforsyningen (VCC). Det anbefales å bruke 10 kOm motstander, men de kan byttes ut med andre fra 4,7 kOm til 50 kOm. Det er umulig å endre bare GPIO15-motstanden, dens pålydende verdi skal være opptil 10 000. Direkte kobler vi bare GND til den negative strømledningen (GND). For å gå inn i firmwaremodus må GPIO0 være koblet til GND. Knappen er nødvendig for å starte modulen på nytt når den er blinket. Konklusjonene fra Tx, Rx, GND er gjort i USB-TTL-kontakten. USB-TTL-tilkoblingen er som følger:
ESP 8266 - USB-TTL
Tx - Rx
Rx - Tx
GND - GND
Ordningen er som følger:

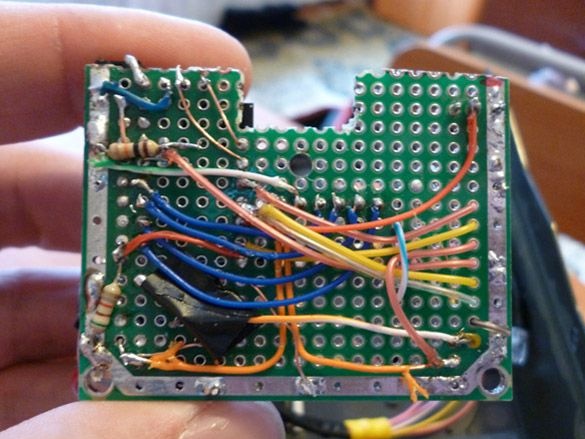
Det er mest praktisk å plassere det hele på et lite kretskort:
Vi fikser kretskortet bak på tanken:
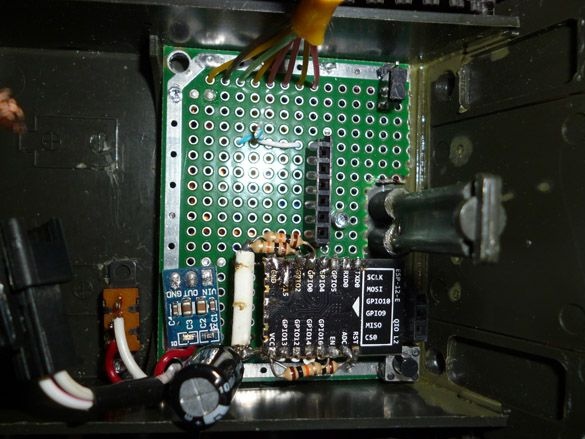
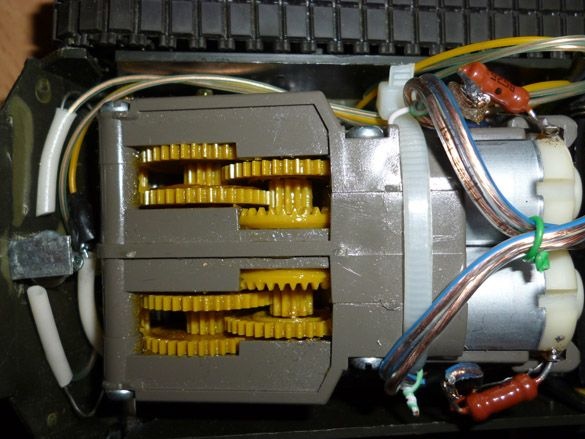
Batterirommet er plassert mellom girmotoren og kretskortet:

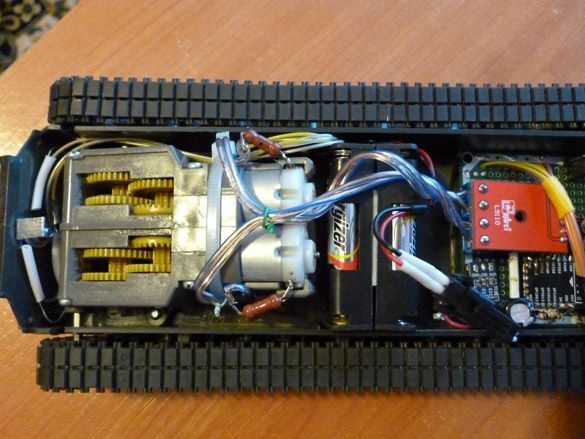
All montert og installert elektrikk befinner seg i den nedre delen av tanken:
Trinn 3-programvare.
For å redigere og fylle skissen i ESP må du laste ned Arduino IDE fra det offisielle nettstedet
Arduino.cc.
Installer deretter Arduino IDE. Etter det fortsetter vi med å installere tilleggsprogrammet for ESP. Dette gjør vi gjennom styrelederen. Først starter du Arduino IDE, deretter File - Settings - i feltet URL for tilleggsforvaltningsstyrer, legg inn lenken:
http://arduino.esp8266.com/package_esp8266com_index.jsonklikk på OK (du kan legge inn flere lenker atskilt med komma i dette feltet). Gå deretter til Tools - Board - Boards Manager i filterfeltet, skriv inn esp8266 og velg ESP8266 av ESP8266 Community Forum. Klikk på Installer og vent til nedlastingen er fullført. Nå velger vi fra menyen Tools - Board - Generic ESP8266 vi setter frekvensen til modulen din 80 eller 160Mhz, størrelsen på flashminnet. Velg deretter serieporten som USB-TTL-adapteren er koblet til.
Nå må du installere verktøyet for å få tilgang til ESP-filsystemet. For å gjøre dette, flytter du filene i arkivet til verktøymappen, som du finner i rotkatalogen til Arduino IDE.
Trinn 4 Skisse
Nå som programmeringsmiljøet er klart, la oss gå videre til redigering av skissen. Åpne skissen:
I begynnelsen leter vi etter feltet "String _ssid =" ";". Angi hvilket tilgangspunkt du vil koble til mellom anførselstegnene.
Felt "Streng _password =" ";" - brukes til å registrere passordet for dette nettverket.
Hvis ESP ikke kan koble til nettverket som er angitt på de foregående linjene, vil kontrolleren opprette et nettverk den kan koble seg til.
Felt "String _ssidAP =" ";" - indikerer navnet på nettverket som opprettes.
Felt "String _passwordAP =" 12345678 ";" - angir passordet til det opprettede nettverket.
Felt "String SSDP_Name =" ESP_Wi-Fi ";" - angir navnet på SSDP.
Etter å ha redigert alle linjene ovenfor, må du laste opp webskallet til ESP 8266. Vi kobler ESP 8266 via USB-TTL til datamaskinen i henhold til diagrammet over. I Arduino IDE velger du Verktøy - ESP8266 Sketch Data Upload. Vi venter på slutten av filopplastningsprosessen. Nå kan du ta opp selve skissen. Først må du sette ESP8266 i firmwaremodus. For å gjøre dette, koble GPIO0 til GND. Trykk på skissefyllknappen, og trykk deretter på tilbakestill-knappen på EPS-modulen. Venter på at skissen er ferdig med å fylle.
Jeg forklarer litt algoritmen til ESP 8266. Når du starter opp, prøver EPS å koble seg til Wi-Fi-nettverket som er spesifisert i feltet String _ssid. Hvis dette av en eller annen grunn mislyktes, hever ESP sitt nettverk med navnet som er spesifisert i ssidAP-feltet. I det første tilfellet kan du kontrollere tanken gjennom hvilken som helst enhet som er koblet til det samme nettverket. I det andre tilfellet må du koble til ESP gjennom hvilken som helst enhet, nettbrett, telefon eller datamaskin. Neste, i nettleseren til enheten som vi vil kontrollere tanken gjennom, må du oppgi IP-adressen til tanken. Du kan finne ut IP-adressen ved å koble ESP til datamaskinen, deretter åpne terminalvinduet og starte ESP på nytt. Når den lanseres, vil IP-adressen til tanken bli skrevet i terminalvinduet. Eller du kan spesifisere en fast IP-adresse tildelt av ESP i innstillingene til Wi-Fi-ruteren. Hvis du bruker en datamaskin med Windows, kan du også gå inn i nettverksinfrastrukturen, finne tanken vår der og dobbeltklikke på den for å koble til. Hvis ESP selv hever tilgangspunktet, vil tankens IP-adresse være 192.168.1.1.
Nettgrensesnittet er skrevet i HTML og består av to sider. Den første inneholder kontrollkommandoer. På det andre kan du endre innstillingene til ESP 8266. På innstillingssiden er følgende parametere tilgjengelige for endring: navnet på tilgangspunktet du vil koble til, passordet til dette tilgangspunktet, navnet på tanken, navnet på nettverket som opprettes og passordet for tilkobling til dette nettverket. Alle endringer trer i kraft først etter omstart. ESP-omlastingsfunksjonen er også tilgjengelig fra nettgrensesnittet.
Etter fullført arbeid kan tanken males ved bruk av modellmaling. Den malte tanken ser penere ut:

Jeg har ikke tålmodighet for en slik jobb. Derfor blir modellene mine igjen uten å male:

