


God ettermiddag, i dag vil jeg dele instruksjoner om å lage en tank. Det vil være to alternativer for den interne kontrolleren: ESP -8266 og Arduino Pro Mini. I den første versjonen utføres kontrollen via Wi-Fi-kommunikasjon. I den andre - IR-fjernkontrollen. Den er laget på grunnlag av TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), den er drevet av et Tamiya 70097 Twin-Motor Gearbox Kit og motorene som fulgte med girkassen.
Vi trenger:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- modelllim (TAMIYA Sement for eksempel)
- Tamiya 70097 Twin-Motor Gearbox Kit
- ESP 8266 -12E eller Arduino Pro Mini 8MHz 3.3V
- spenningsstabilisator AMS 1117 3.3v 8000mA (hvis tilleggsutstyr med ESP 8266-12E)
- Qifei L9110 motorfører
- kondensator 10v 1000uF
- tofarget (rød, grønn) LED
- blå LED
- 2 røde lysdioder
- IR-mottaker
- fotoresistor
- 2 rom for 2 AAA-batterier eller 4 AAA 1,2V 1000mA NI-MN-batterier
- 2 motstander 2ohm
- 4 motstander 75 ohm
- 6 motstander 10 kOhm (hvis tilleggsutstyr med ESP 8266-12E)
- knapp
- fotoresistor
- USB - TTL
- loddejern
- flerfargede ledninger
Trinn 1 Hus og mekanikk.
Først må du samle modellen TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Vi limer den nedre delen i henhold til instruksjonene, med unntak av delene som dekker utløpsåpningene for girkasseakslene. Ledende stjerner klistrer seg heller ikke. Lim den øvre delen i henhold til instruksjonene uten endringer. Etter å ha limt alt dette, la det tørke og fortsett til samlingen av girkassen. Som det fremgår av instruksjonene, kan Tamiya 70097 settes sammen i to forskjellige versjoner.
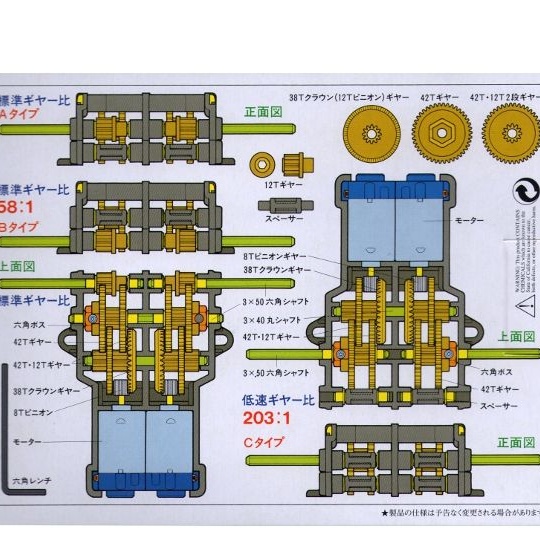
Det første alternativet med et girforhold på 58: 1, det andre - 203: 1. Vi trenger det første alternativet. Og også her er ikke det så enkelt. I dette tilfellet kan aksens utgang være nærmere bunnen av girkassen eller i midten. Akser må pustes ut i det midterste hullet! Etter å ha samlet girkassen, fortsetter vi å installere den på modellen. I teorien skal alt være enkelt, fordi både modell og girkasse til ett firma. I praksis - girkassen måtte skyves dit. I girkassens horisontale stilling bulte akslene på drivhjulene oppover, så jeg måtte kutte en metallplate, noe som gjorde det mulig å fikse girkassen i ønsket stilling.

Girkasseakslene må kuttes med 3 mm. Lim deretter drivhjulene på dem.

I den øvre delen nærmere baksiden lager vi hull for en tofarget LED og en IR-mottaker.

Nærmere fronten er et hull for en blå LED som vil fungere som lommelykt.

Og inne i luka - for en fotoresistor.

Lim på de røde lysdiodene for å få lys på baksiden.

Til alt det ovennevnte, må du lodde ledningene. Det er mer praktisk å gjøre dette før installasjonen.
Trinn 2 Elektriker
Her vil jeg tilby et utvalg av alternativer for videre montering.
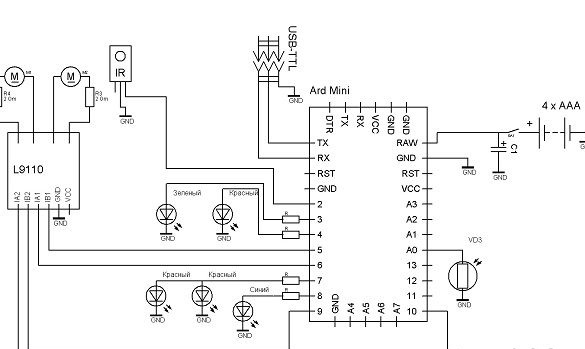
Hvis du har valgt ESP 8266. Den innebygde Wi-Fi-modulen forenkler prosessen med kontroll og tilkobling.Det kan enkelt programmeres i Arduino IDE. Det beste er å velge en modul med 4 Mb minne. I dette tilfellet er det nødvendig å samle minimumsselen for å starte og blinke ESP-8266. Bare VCC-pinnen er koblet direkte til strømforsyningen, de gjenværende pinnene: CH_PD, RESET, GPIO0, GPIO2, må trekkes til strømforsyningen (VCC) via en motstand. 10 kOm motstander kan byttes ut med andre, fra 4,7 kOm til 50 kOm, med unntak av GPIO15 - dens verdi må være opp til 10 kM. Direkte, til minus (GND) for strømforsyningen, kobler vi bare GND, og vi drar også GPIOO gjennom motstanden til 10kOm, for å sette modulen i nedlastingsmodus for fastvare, til GND. Knappen er nødvendig for å starte og blinke modulen på nytt. USB-TTL-kontakt - for firmware.
Her er et diagram
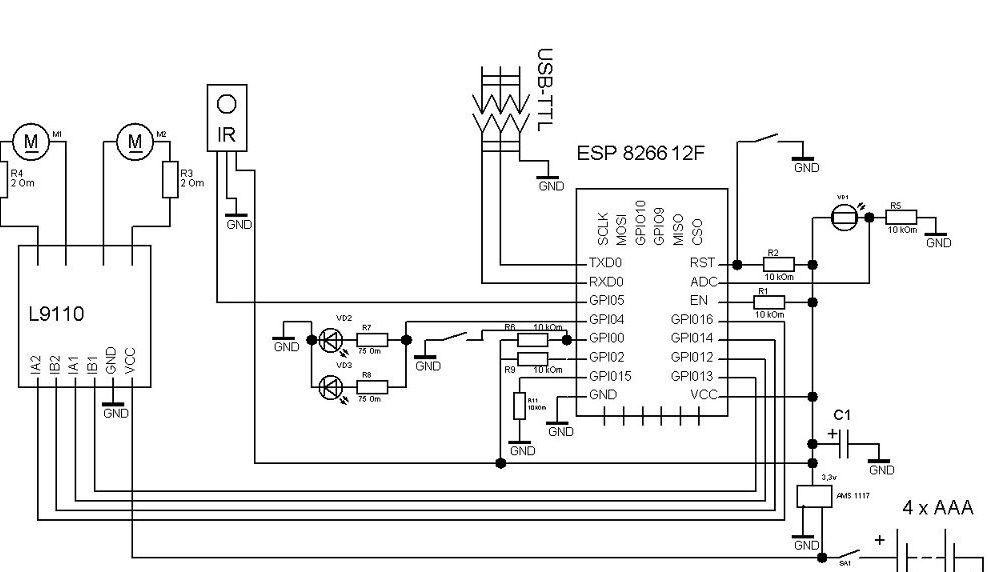
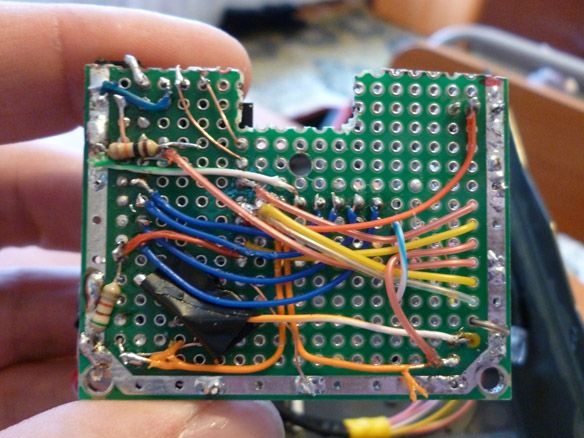
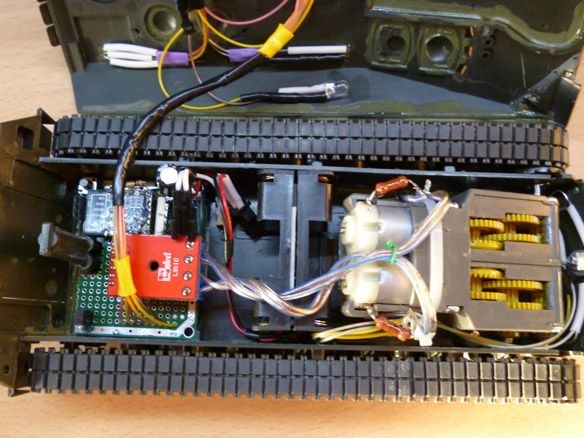
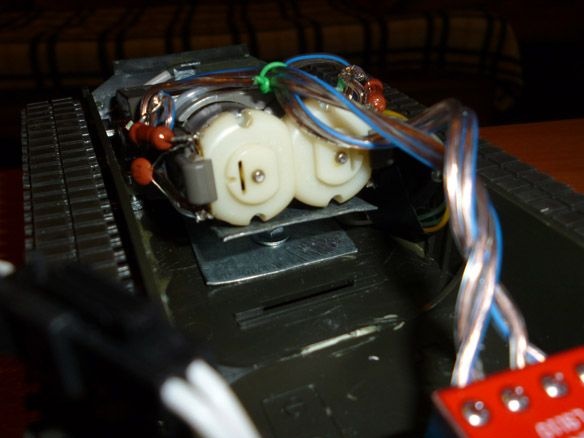
Jeg skal forklare litt, de blå og to røde lysdiodene er nødvendige for bakgrunnsbelysning (det er synlig og vakkert i mørket), fotoresistor er koblet til ADC på kontrolleren og er nødvendig for å bestemme belysningen (når bakgrunnsbelysningen blir mørk). 10 kOhm opptrekksmotstander, 75 ohm for lysdioder, 2 ohm strømbegrensning for motorer (uten dem, når du prøver å bevege, overbelastet kontrolleren). Vi lodder alt i henhold til kretsen på kretskortet. For strømforsyning kan du bruke 4 "små" batterier eller fire AAA-batterier, loddede i serie. Vi limer to rom med to batterier med dobbeltsidig tape og kobles sammen i serie. Både batterirom og akkumulator er plassert mellom girkassen og kretskortet.

Hvis valget ditt falt på Arduino. Bare Arduino Pro MINI passer inni. Det er verdt å velge et 3,3 volt kort, da motorene er designet for 3 volt, og du ikke ønsker å drive motorene og Arduino separat. Arduino er enklere. Hele reguleringsselen og spenningsregulatoren er allerede på selve brettet. Det gjenstår å løsne Arduino-kontakten og motorføreren på kretskortet.

Trinn 3 Forberede programmeringsmiljøet.
For å redigere firmware og fylle skissen i ESP, må du installere Arduino IDE fra det offisielle nettstedet til Arduino.cc, samt installere tilleggsprogrammet for ESP, gjennom Boards Manager. For å gjøre dette, start Arduino IDE, deretter Fil - Innstillinger - i feltet URL for tilleggsforvaltningsadministratorer, sett inn lenken
http://arduino.esp8266.com/package_esp8266com_index.jsonklikk på OK (du kan legge inn flere lenker atskilt med komma i dette feltet). Neste verktøy - Board - Boards Manager, skriv esp8266 i filterfeltet og klikk på ESP8266 av ESP8266 Community Forum. Klikk på Installer og vent til nedlastingen er fullført. Nå gjenstår det å velge Board - Generic ESP8266 i Verktøy-menyen og sette frekvensen til modulen din til 80 eller 160 MHz, størrelse på flashminnet og velge serieporten som USB-TTL-adapteren er koblet til.
For Arduino er det bare å installere Arduino IDE fra det offisielle nettstedet Arduino.cc.
Trinn 4 Firmware
Det gjenstår å redigere skissen og fylle den med ESP.
I feltet "String _ssid =" ";" mellom anførselstegn indikerer hvilket tilgangspunkt du vil koble til.
"String _password =" ";" er passordet for dette nettverket.
"String _ssidAP =" Mardella ";" navnet på nettverket som ESP vil heve hvis det ikke kobles til det eksisterende.
"String _passwordAP =" 12345678 ";" - passordet til nettverket som ESP vil heve hvis det ikke kobles til det eksisterende.
"String SSDP_Name =" Mardella ";" SSDP-navn
Etter start prøver ESP å koble seg til tilgangspunktet spesifisert i skissen, hvis vellykket, må du bestemme IP-adressen til roboten vår og koble til denne adressen gjennom en nettleser. Du kan også gå gjennom en datamaskin til nettverksinfrastrukturen, finne tanken vår der og dobbeltklikke for å koble til den. Hvis tilkoblingen mislykkes, blir ESP tilgangspunktet. Da kan du få tilgang ved å koble til et nytt tilgangspunkt og gå inn i 192.168.1.1 i nettleseren.
Nettgrensesnittet består av to sider. Den første til å kontrollere. Det andre er for tilpasning. På den andre siden kan du spesifisere tilgangspunktet du vil koble til, samt navnet på tanken og navnet og passordet til tilgangspunktet som ESP hever. Alle endringer trer i kraft etter omstart. Du kan også starte modulen på nytt via webgrensesnittet.
For Arduino må du redigere alle “resultatsvalverte” felt. Etter å ha skrevet ned IR-kodene til fjernkontrollen som du skal bruke der.

Video tanchika: