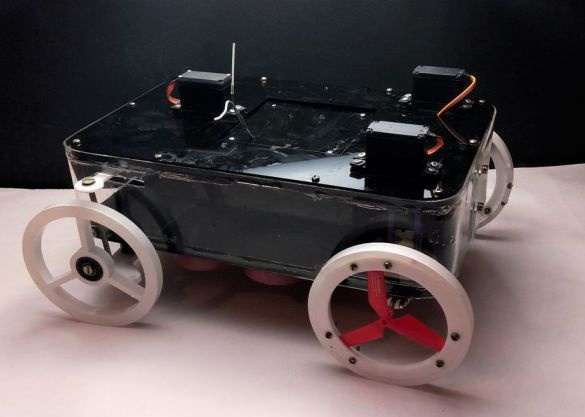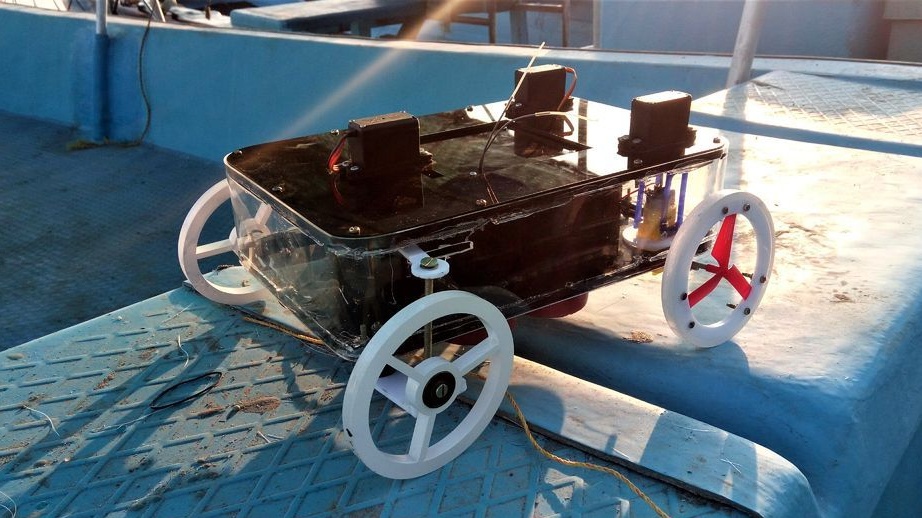



I denne artikkelen vil vi vurdere produksjon av indiske håndverkere av et terrengkjøretøy som beveger seg både på land og på vann. Alt terrengkjøretøy består av en flytende plattform med hjul og en propell. Mekanismer styres av fjernkontroll via Arduino UNO.
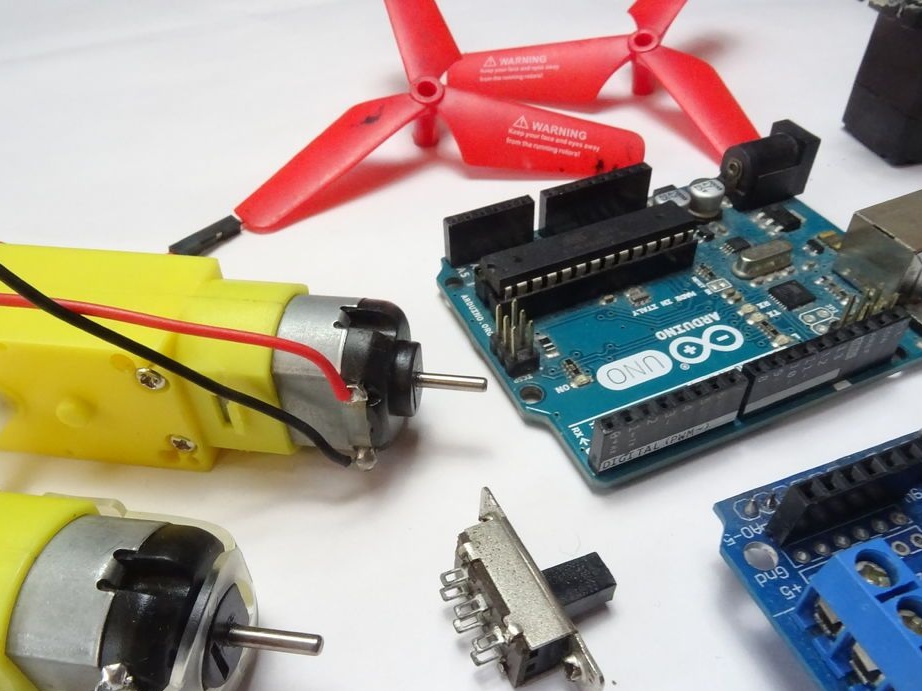
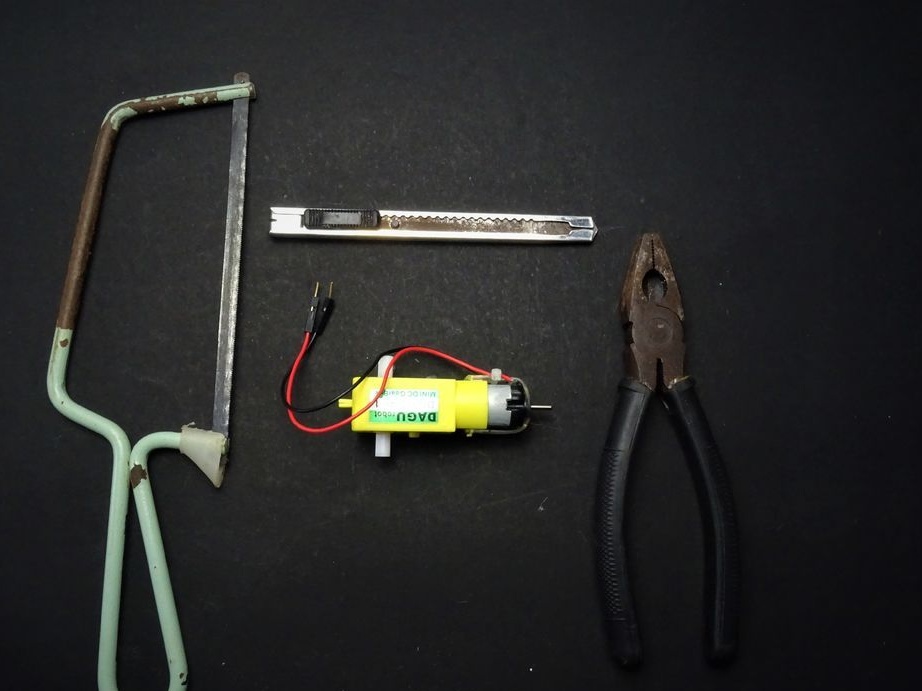
Verktøy og materialer:
-
-AKB 9V;
-Vyklyuchatel;
-Akril;
-Fanera;
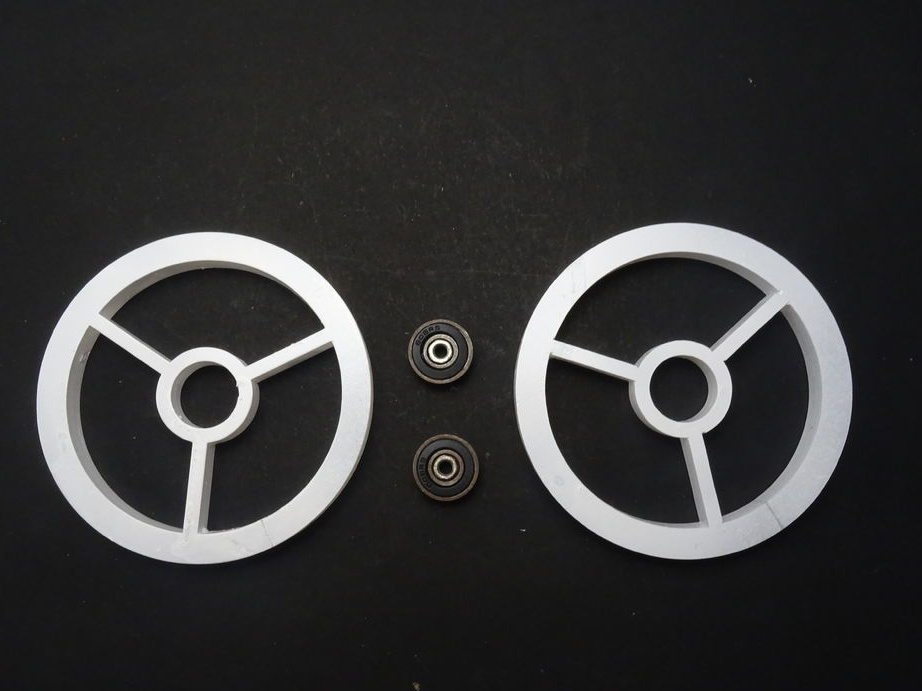
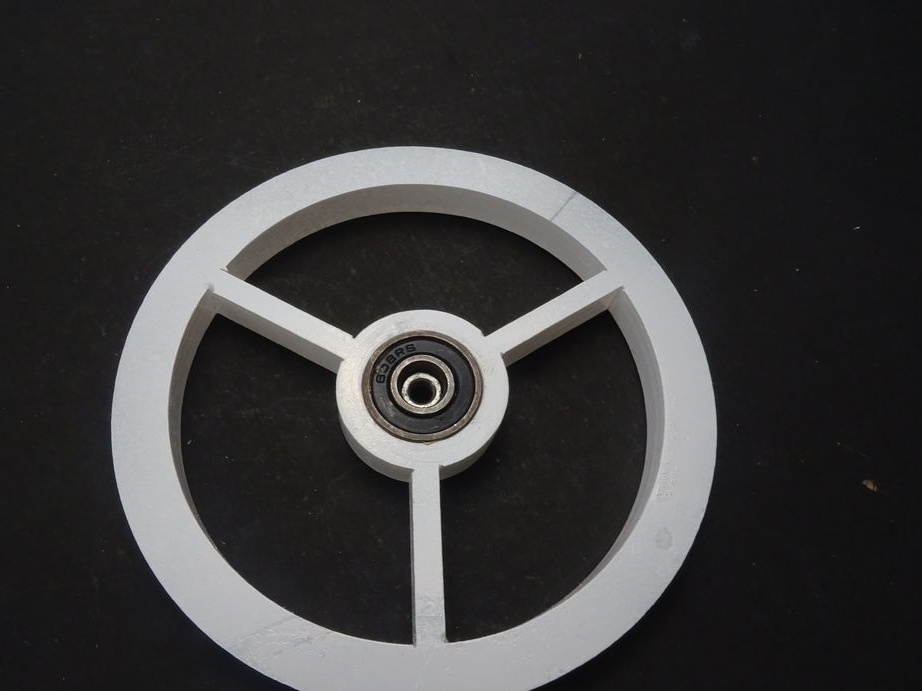
(som referanse, lageret er 8 x 16 x 5 mm, forfatteren indikerer 8 * 22 mm)
-To propeller;
-Krepezh;
-Poplavki;
Limpistol;
-Super lim;
Epoksyharpiks;
Loddejern;
-Drel;
-Laser kutter;
-Pila;
- skrutrekker;
-Drel;
Loddejern;
A-bord;
-Datamaskin med programvare;


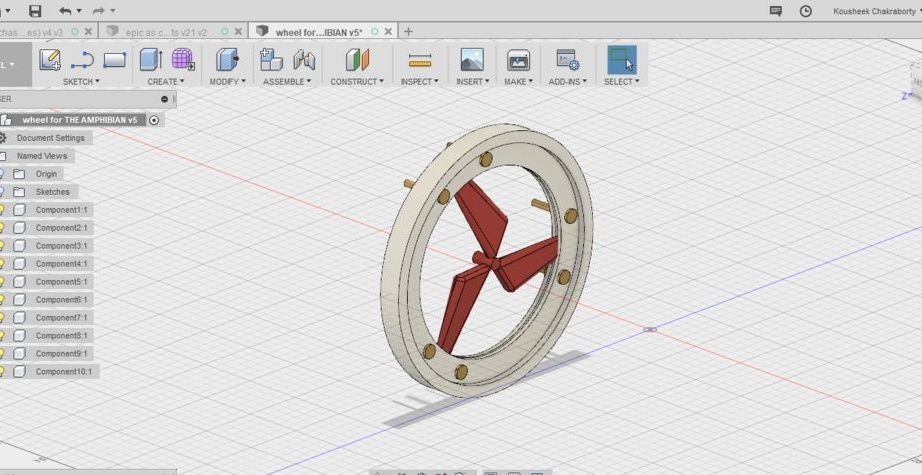
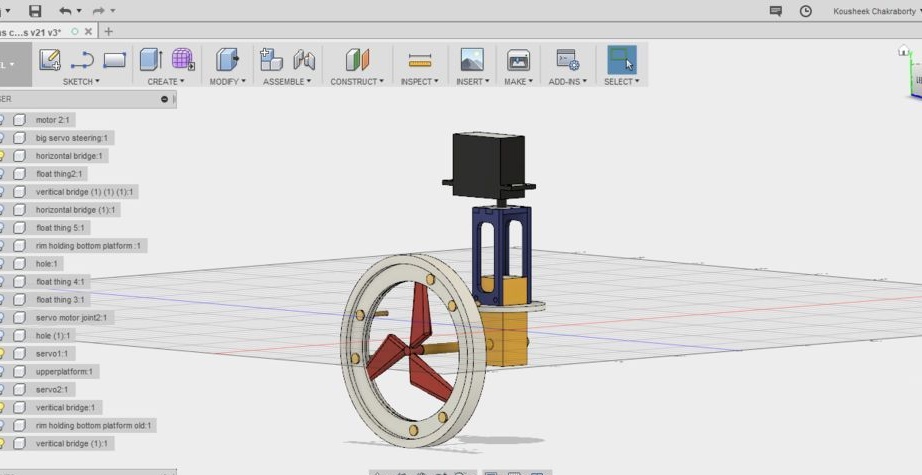
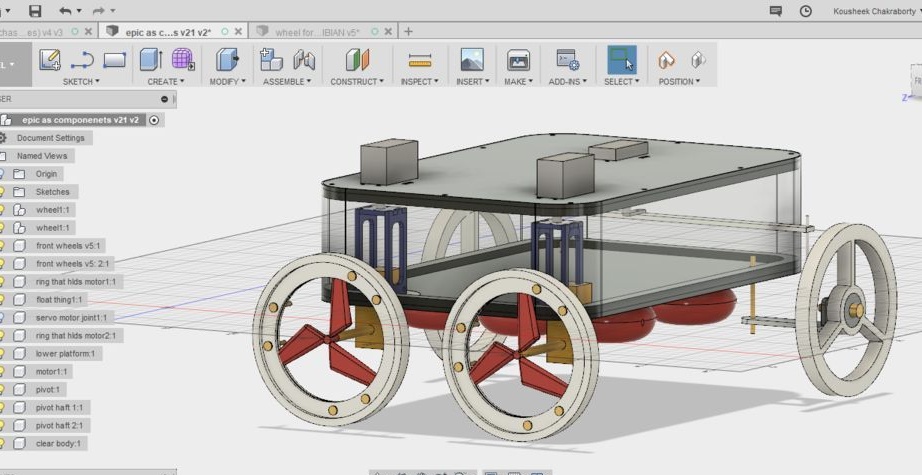
Trinn en: Design
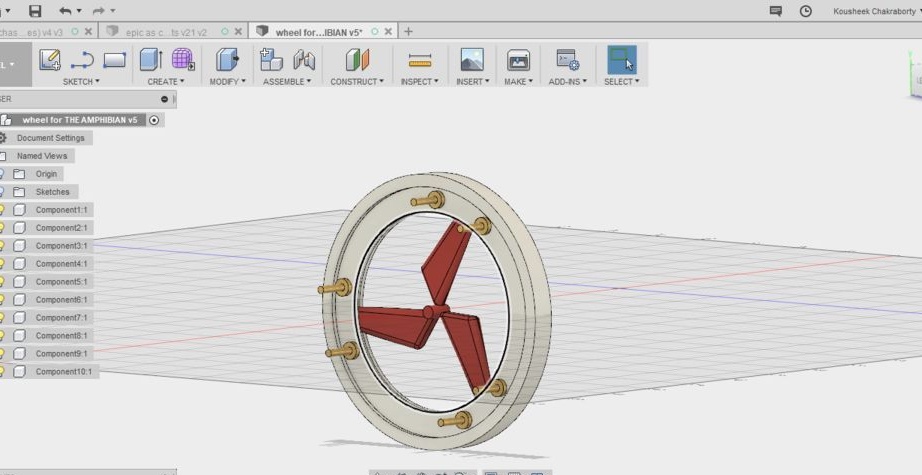
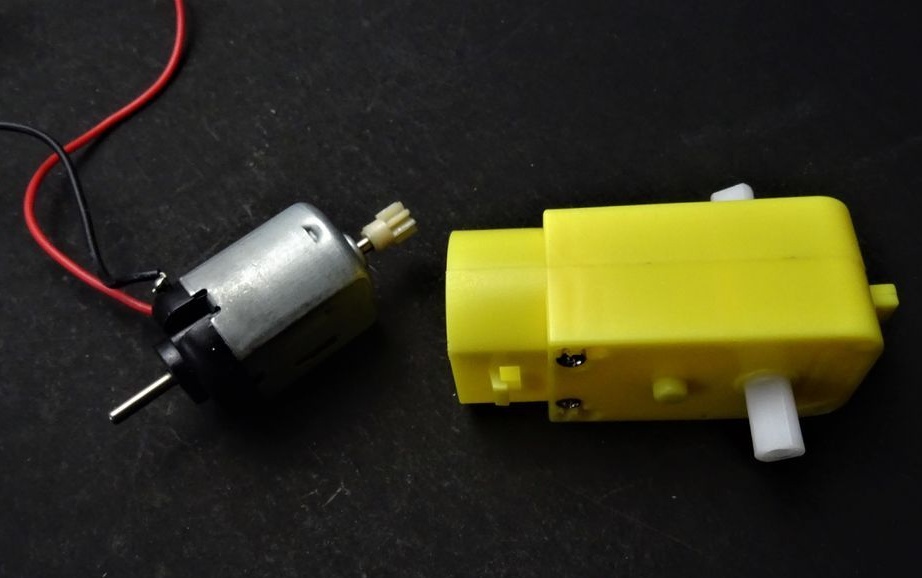
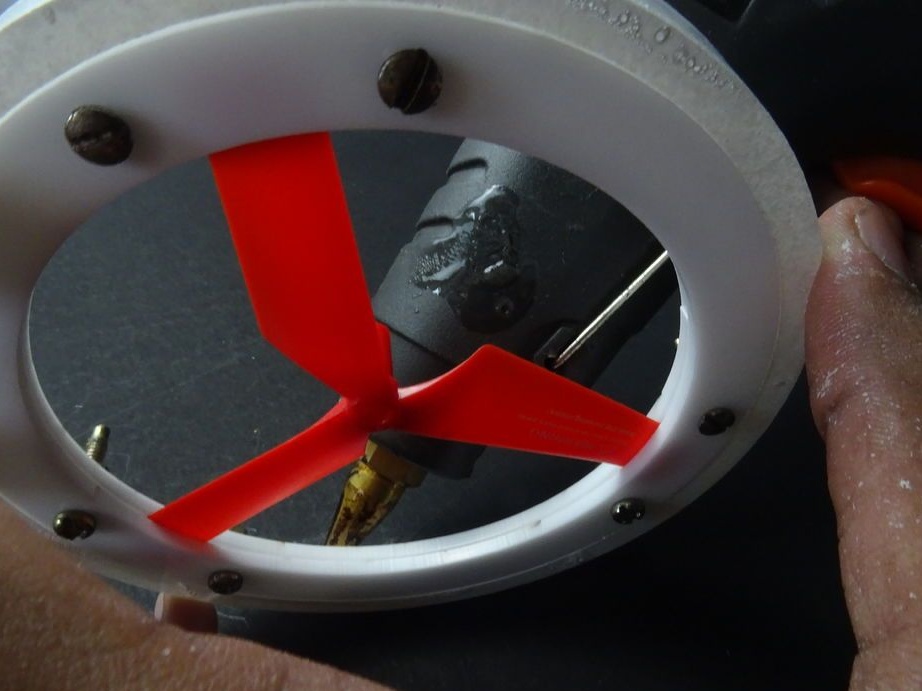
For å lage prosjektet brukte mestrene Fusion 360-programmet. Hele vanskeligheten var å kombinere bevegelse på land og i vann. Ved design av hjulene utviklet mestrene et system der skruene ville åpne seg i vannet, men med tanke på kompleksiteten i designen integrerte de ganske enkelt propellene fra barnas leketøy inne i hjulet. Dette gjør det mulig for hjulene å flytte terrengkjøretøyet på land, og når de kommer inn i vannet blir skruene slått på.
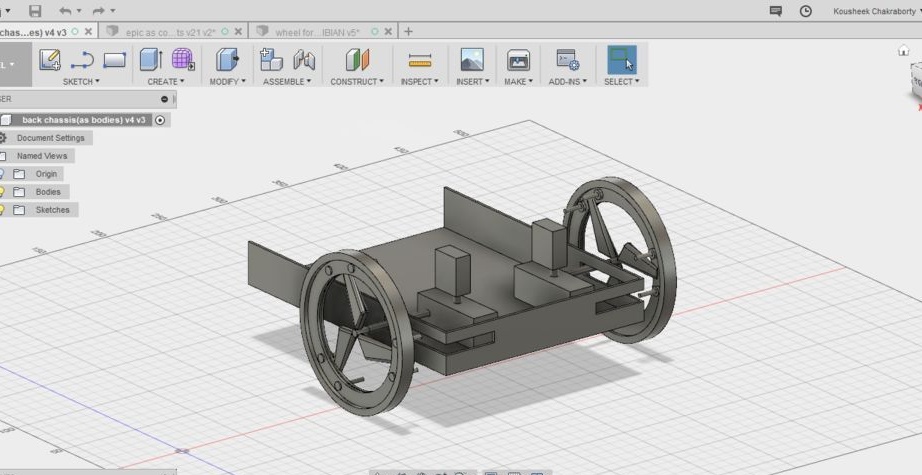
For å implementere denne ideen, må du kunne rotere bakhjulene vinkelrett på terrengkjøretøyet når du kjører på vann. Dette ble mulig da motorgir ble tatt ut av rammen. Plastgir og vann som kommer inn i dem vil ikke skade.
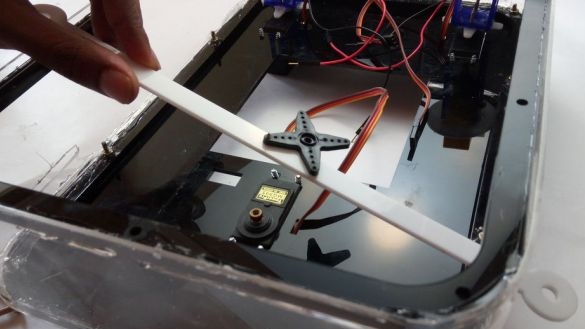
Rotasjonen av hjulskruene vil bli utført ved hjelp av en servodrift.
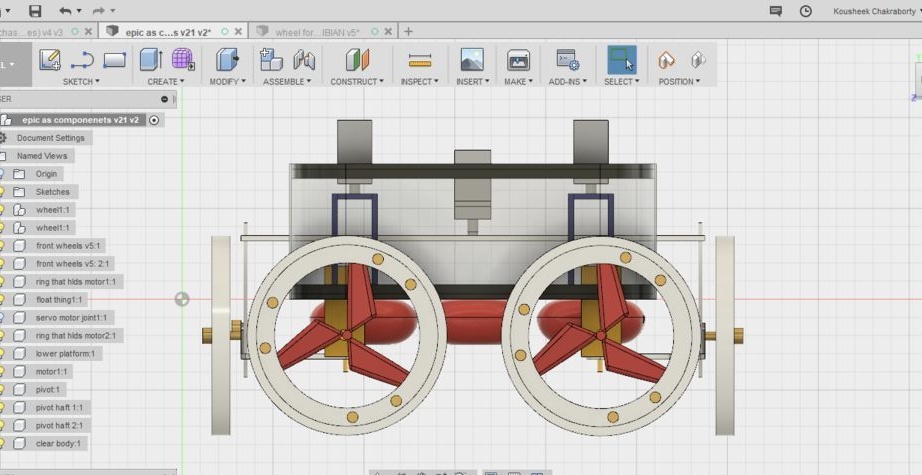
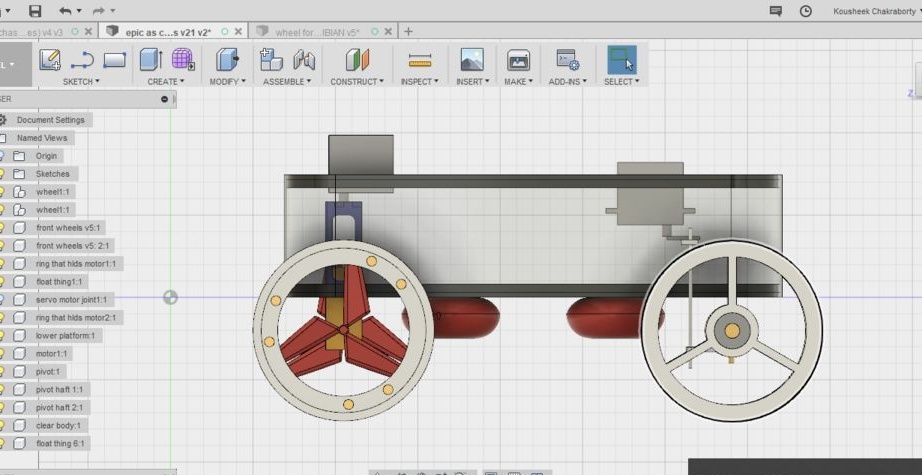
Terrengkjøretøyet har to svingmekanismer. Den ene for å kontrollere bakhjulene til propellene i vannet, og den andre, for å kjøre på land, styrer forhjulene. Rotasjonsvinkelen til forhjulene er 35 grader, noe som gjør at du kan gjøre skarpe svinger.
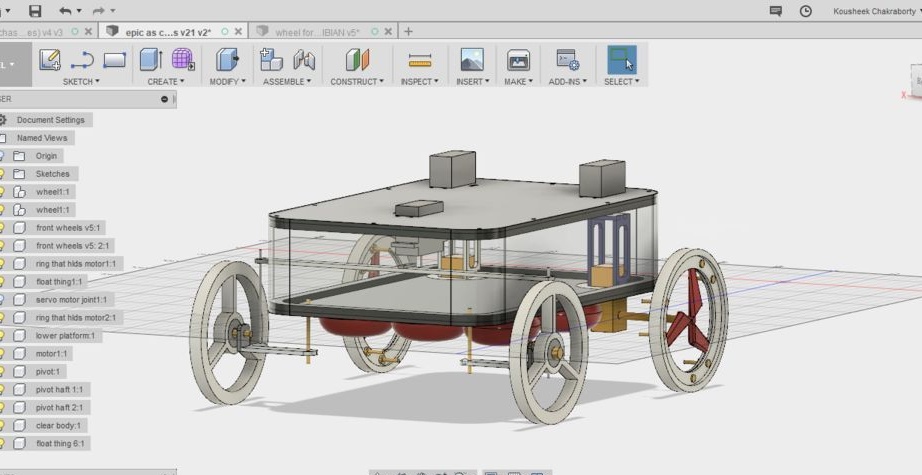
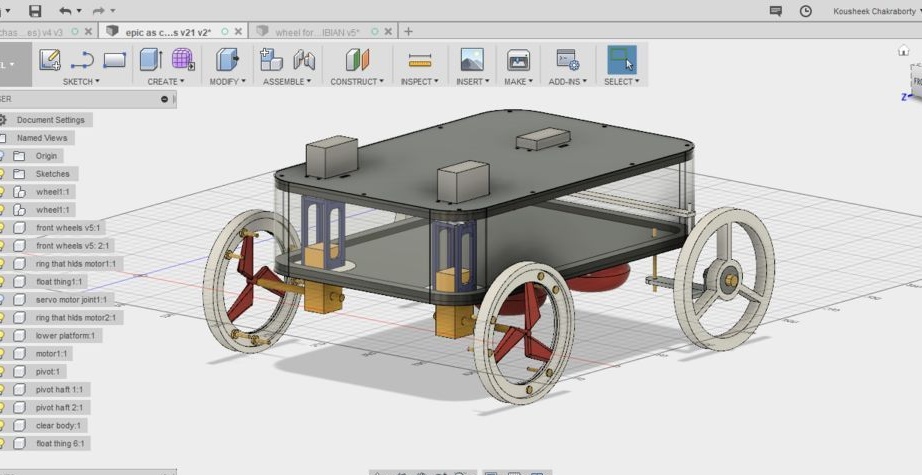
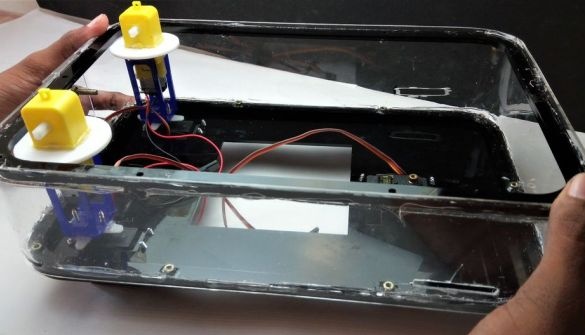
På bildene nedenfor kan du se transformasjonen av terrengkjøretøyet når du beveger deg gjennom land og vann.
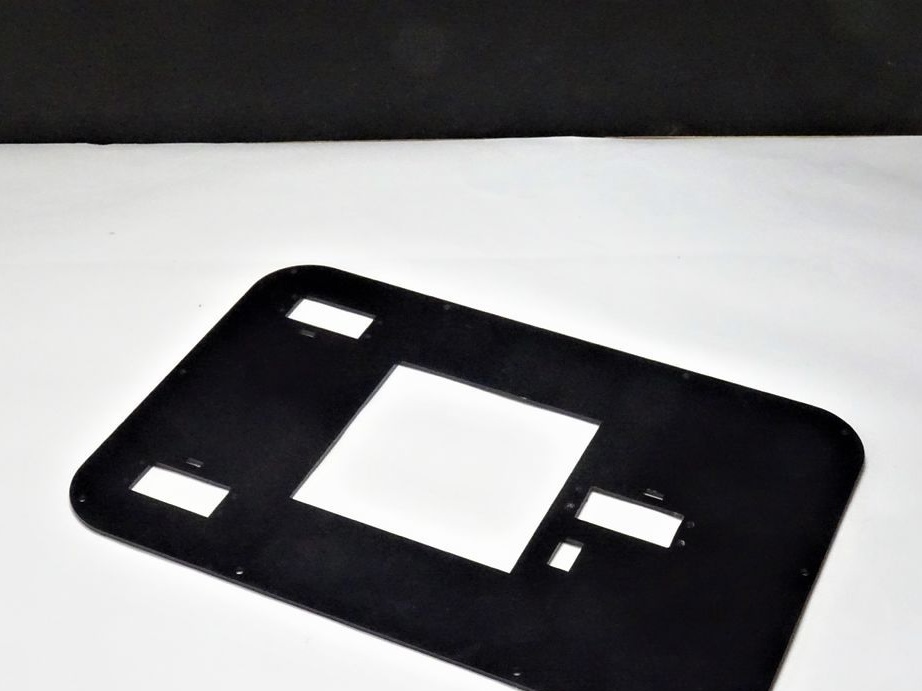
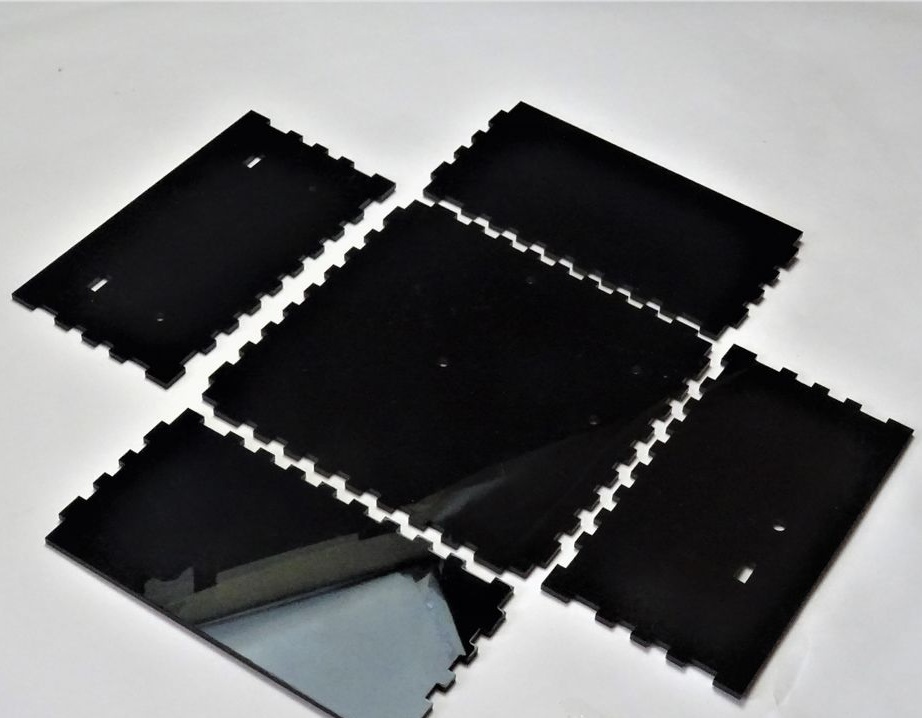
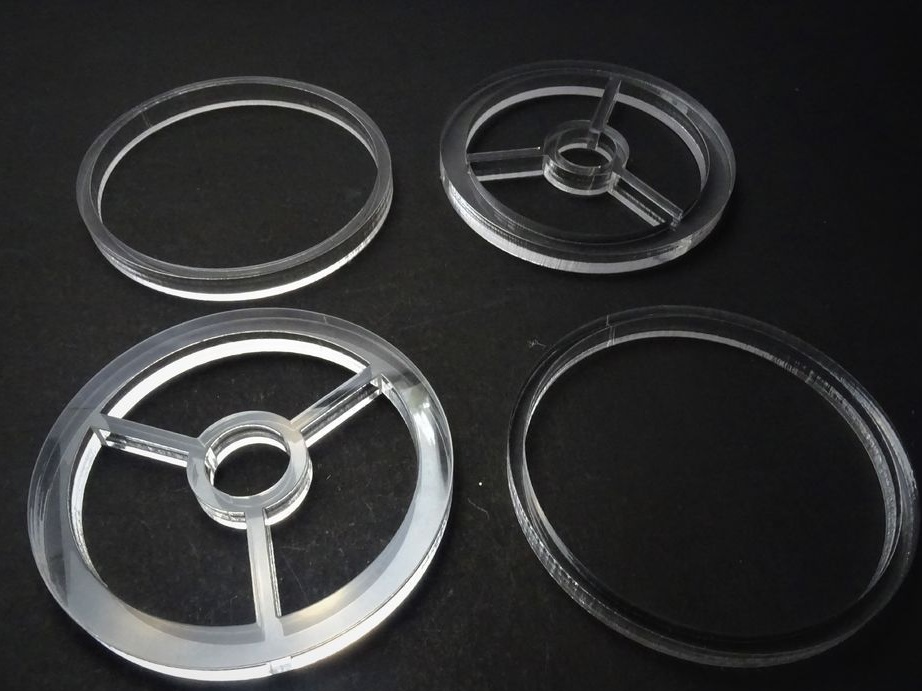
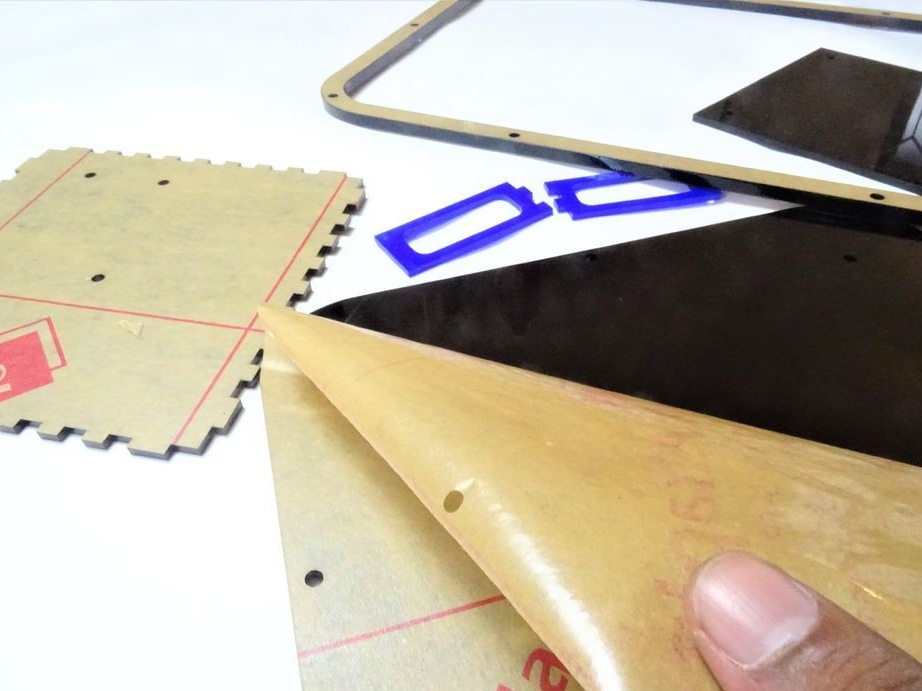
Trinn to: Laserskjæring
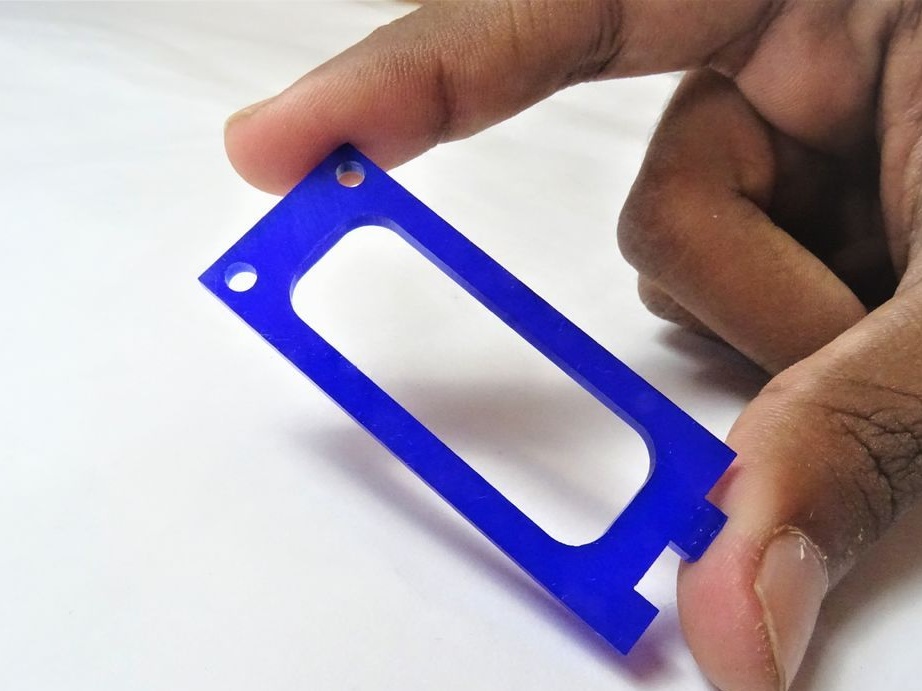
For terrengkjøretøyet brukte mesteren akryl i forskjellige tykkelser og farger.
Svart toppstrøk 3 mm x 1
Bunnlaget Svart 3 mm x 1
Svart sideramme 5 mm x 2
Sidevegg gjennomsiktig 2 mm x 1
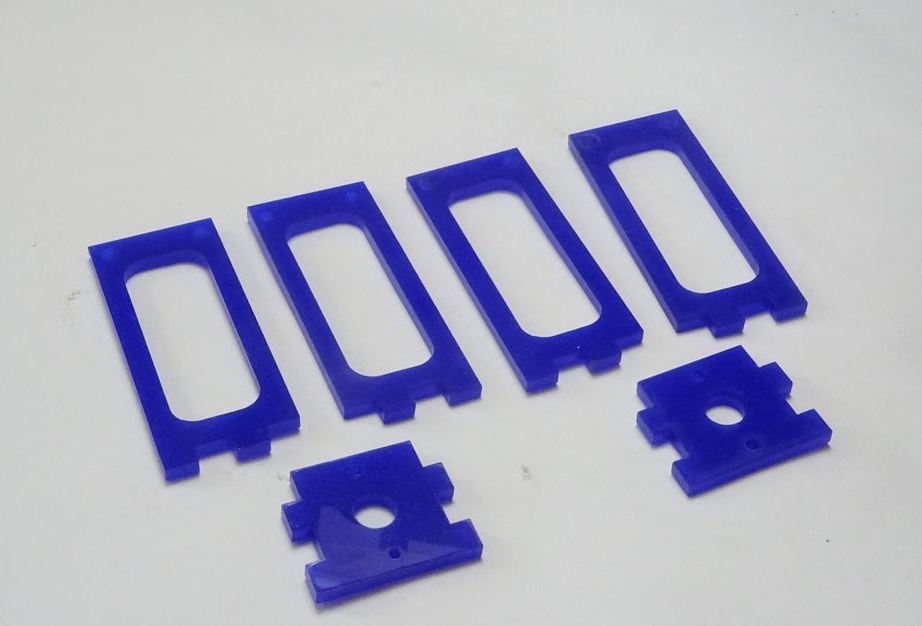
Strøm side blå 3 mm x 4
Bridge Top Piece Blue 3 mm x 2
Motor DisK Hvit 3 mm x 2
Framhjul hvit 10 mm x 2
Indre felg (bakhjul) hvit 3 mm x 4
Ytterkant (bakhjul) Hvit 10 mm x 2
Styring Hvit 3 mm x 1
Skuffeskap Svart 3 mm x 1
Svart kupertrekk 3 mm x 1
Bakre motoraksel Hvit 3 mm x 2
Frontpanel hvit 5 mm x 2



Du kan laste ned filen til CNC fra lenken.
Laser Cutting Rover Parts.zip
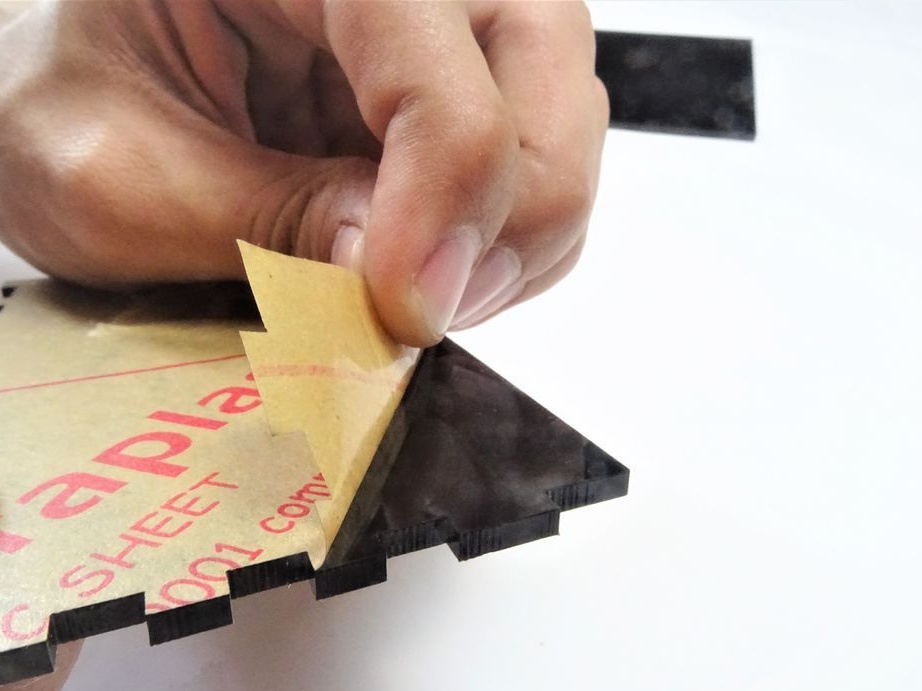
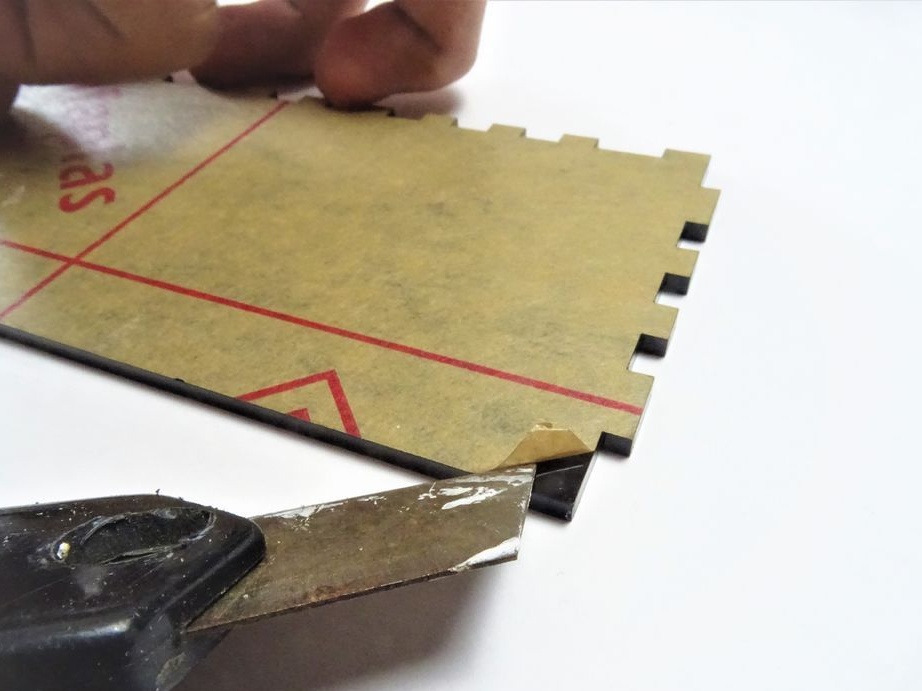
Etter å ha produsert delene, fjerner du beskyttelseslaget fra dem.
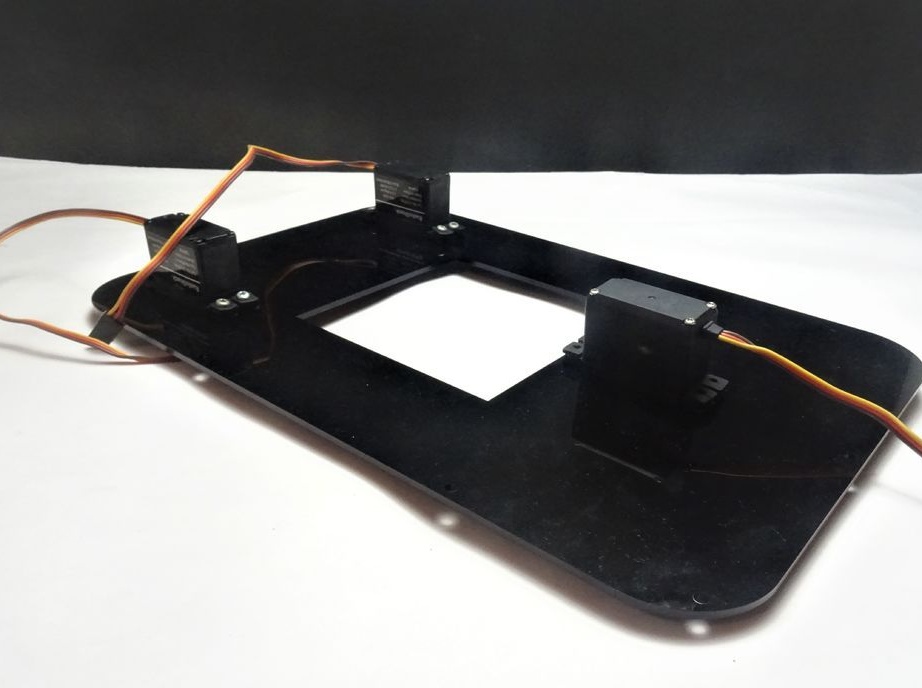
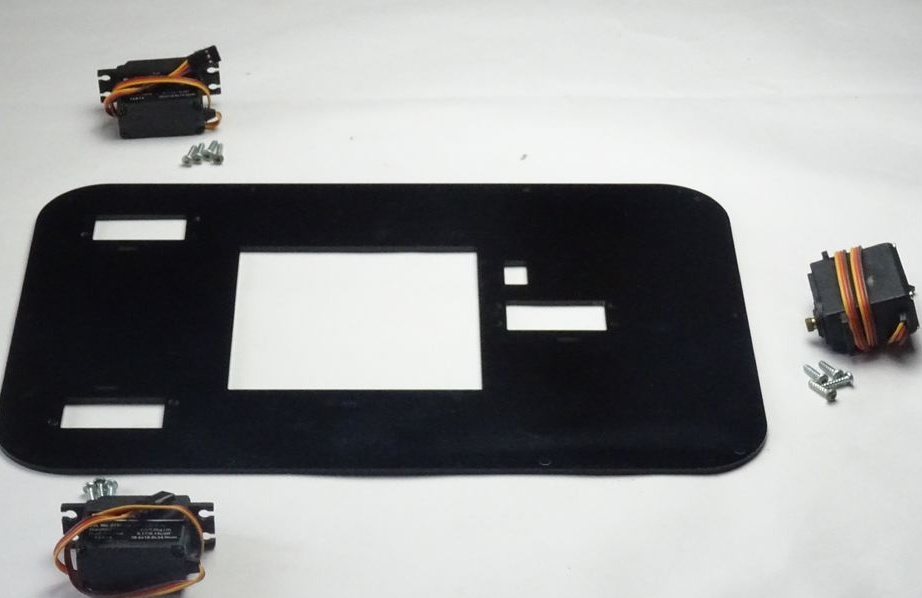
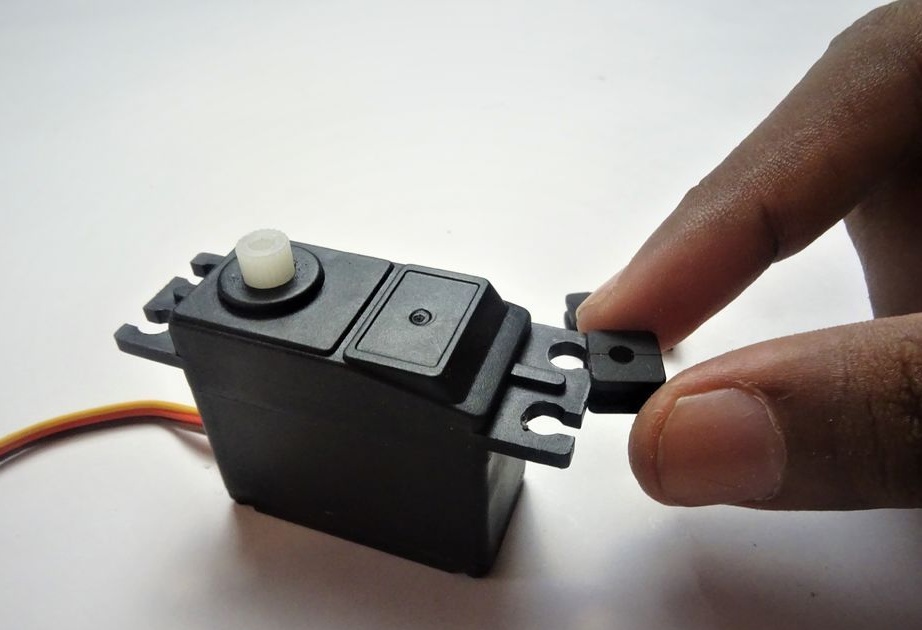
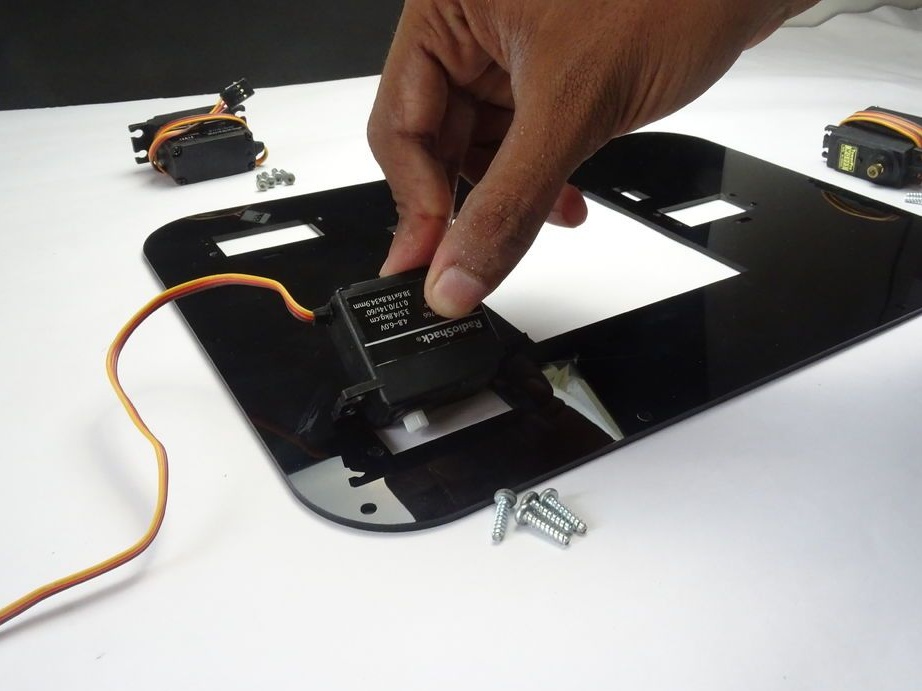
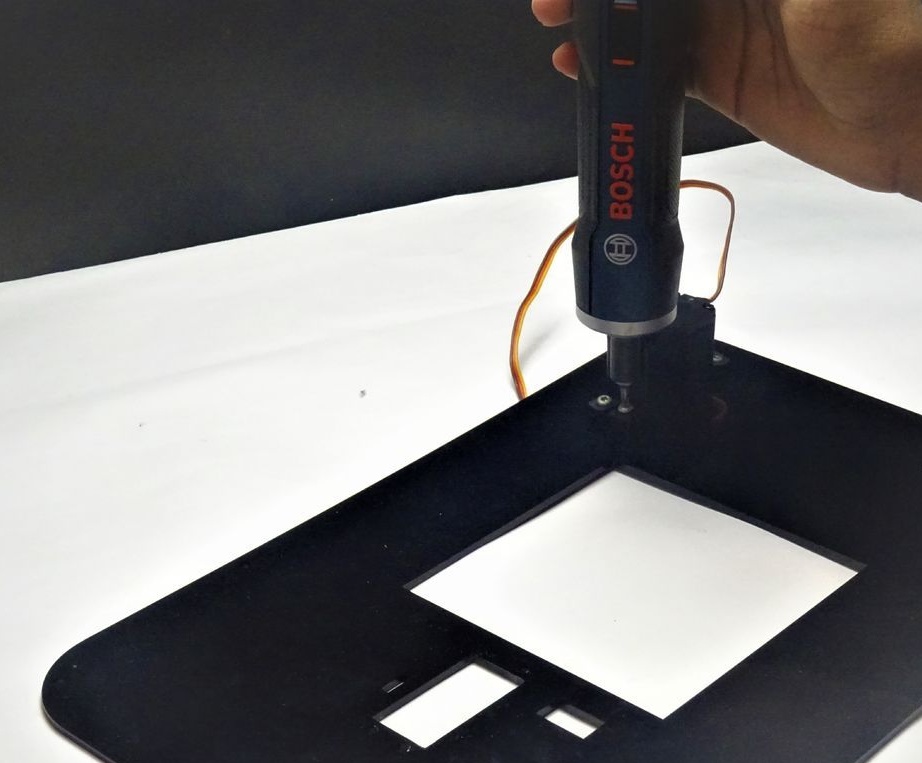
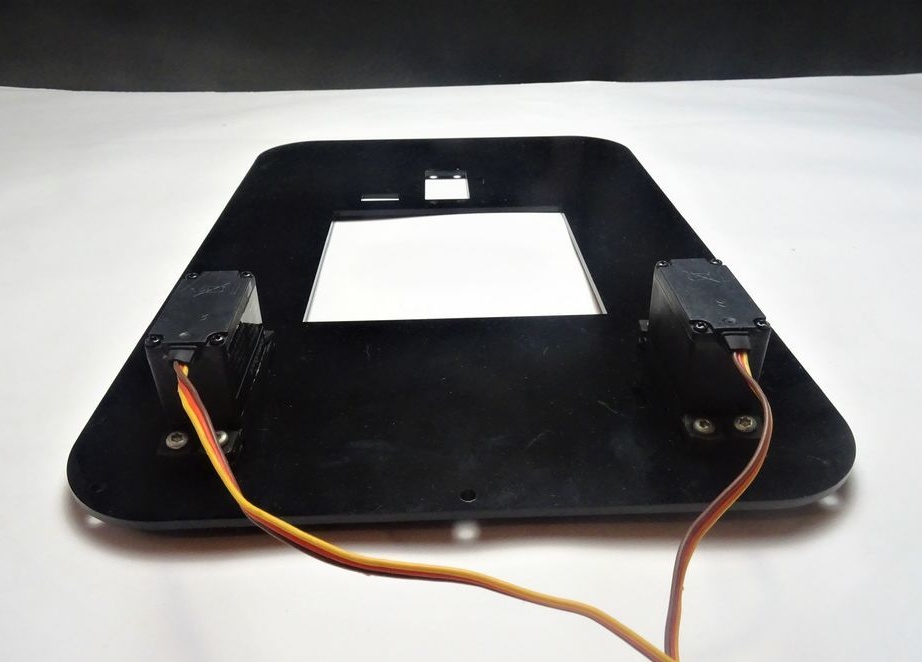
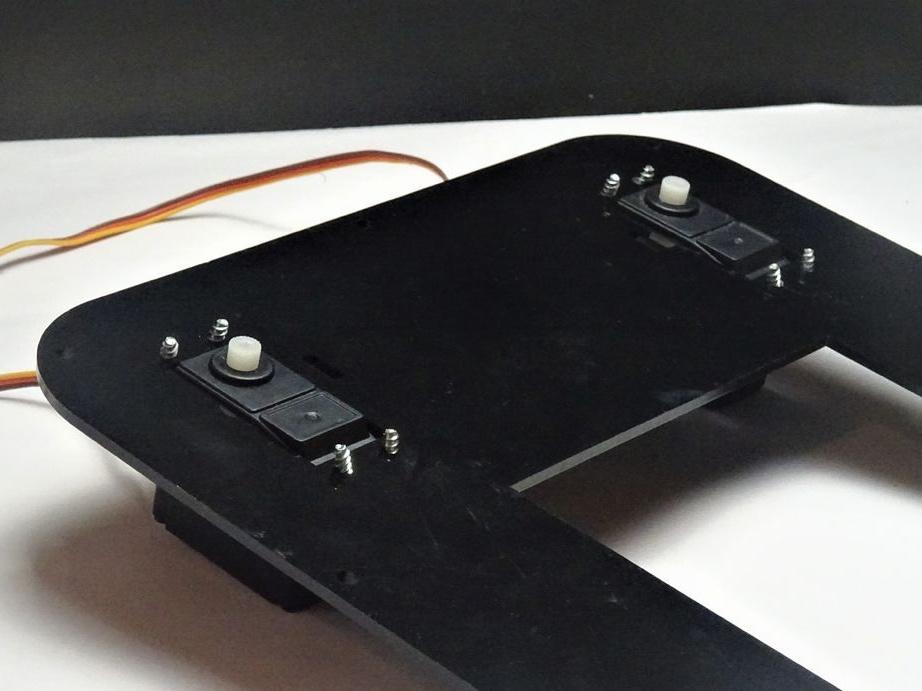
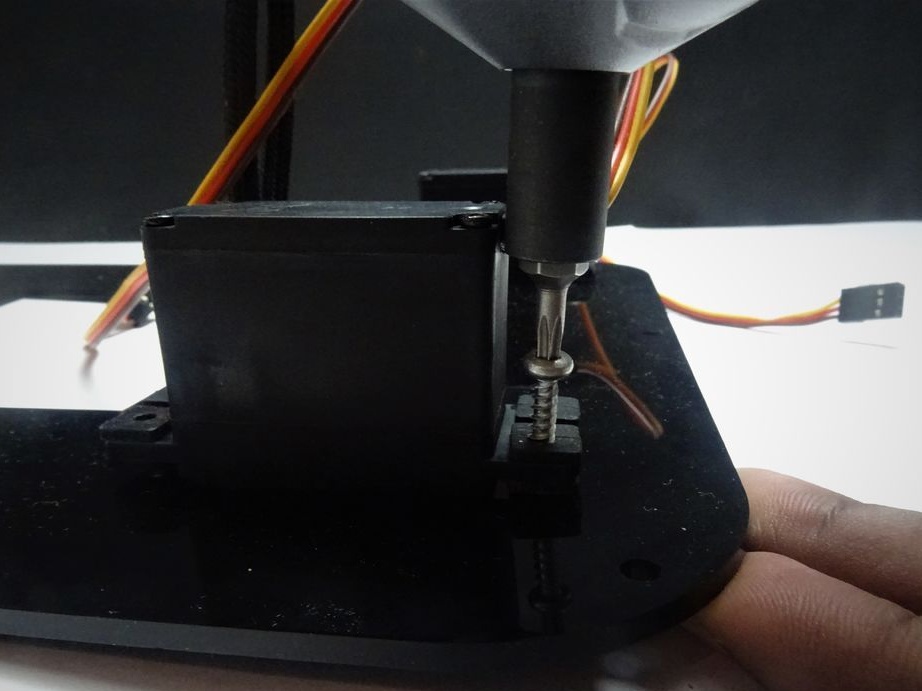
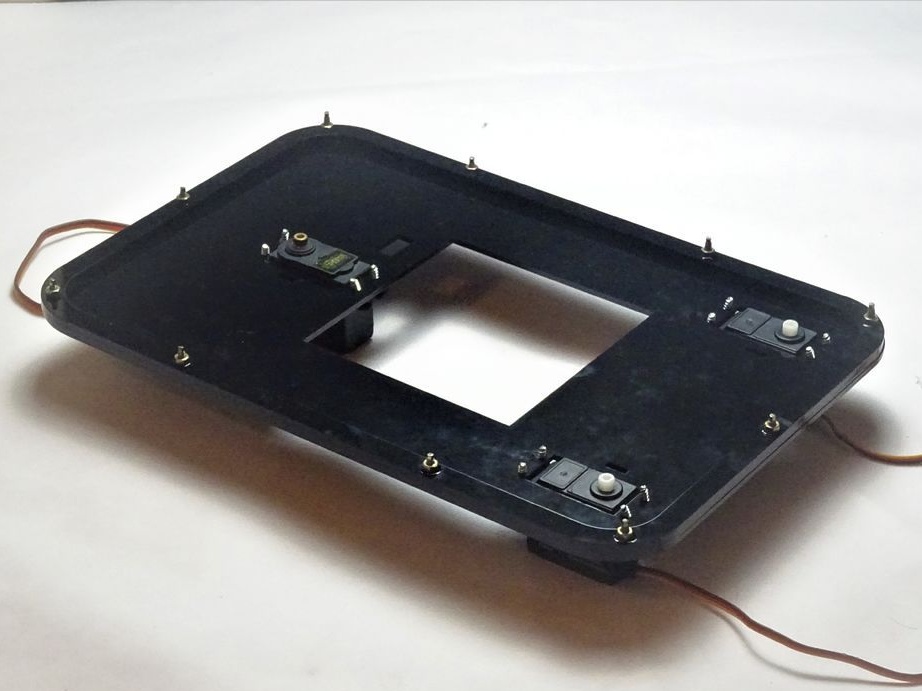
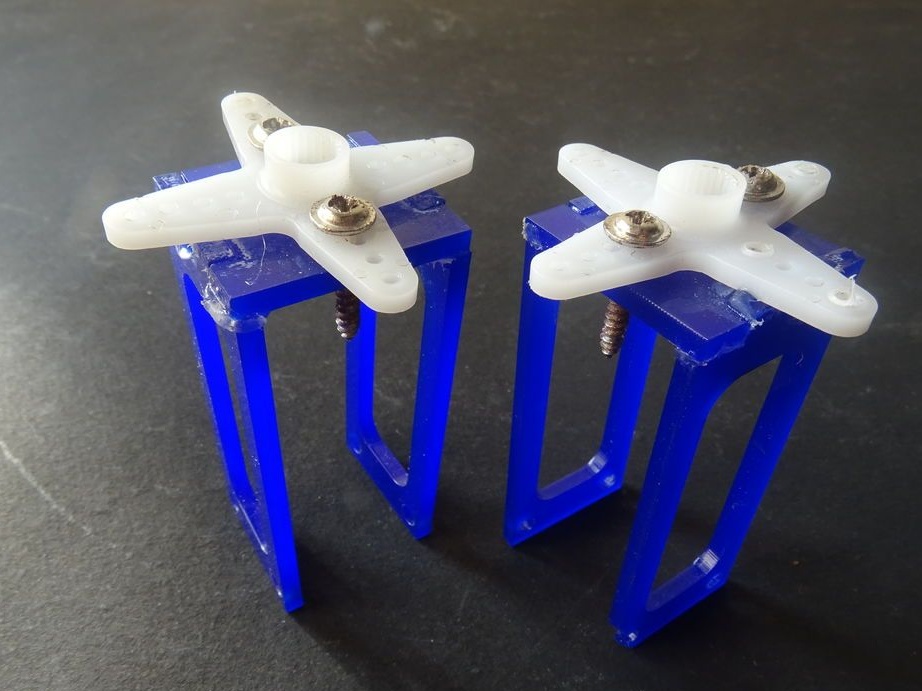
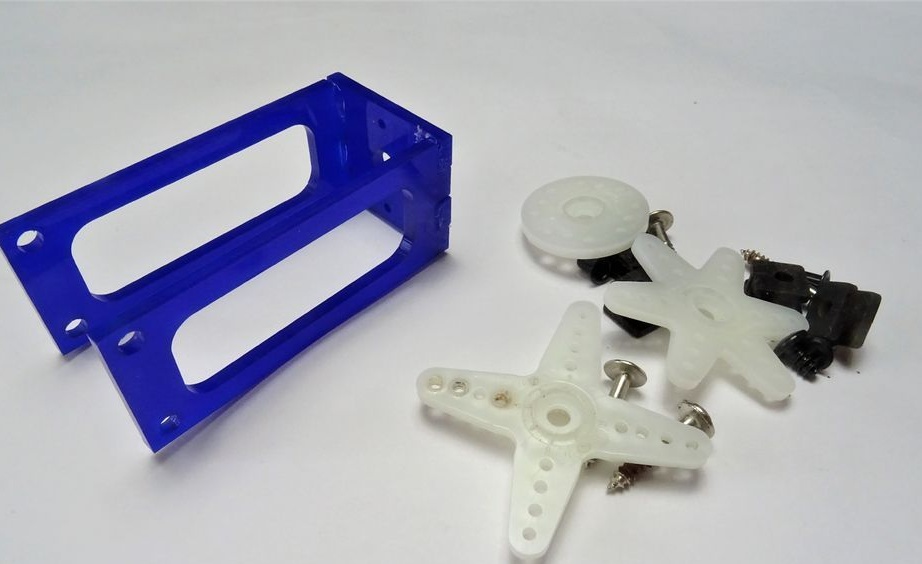
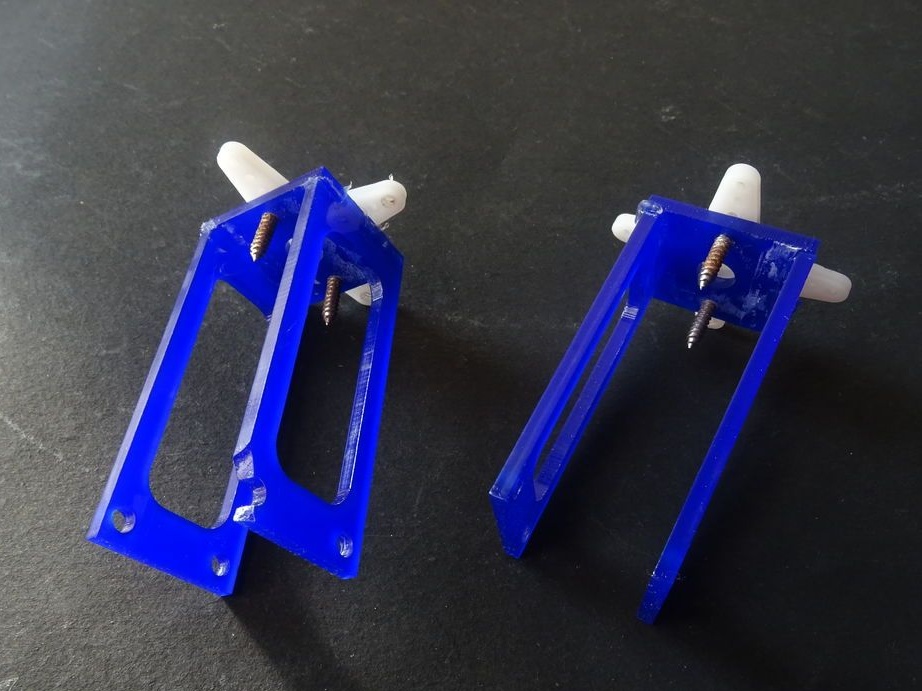
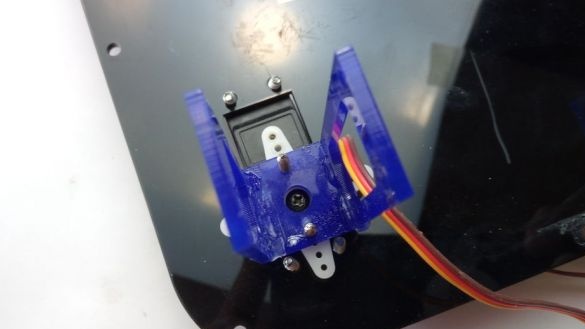
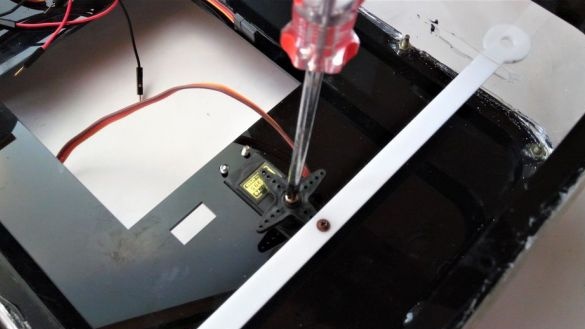
Trinn tre: Installer Servo Motors
Alle tre servomotorene er skrudd fast på plattformen. To bak og en foran.

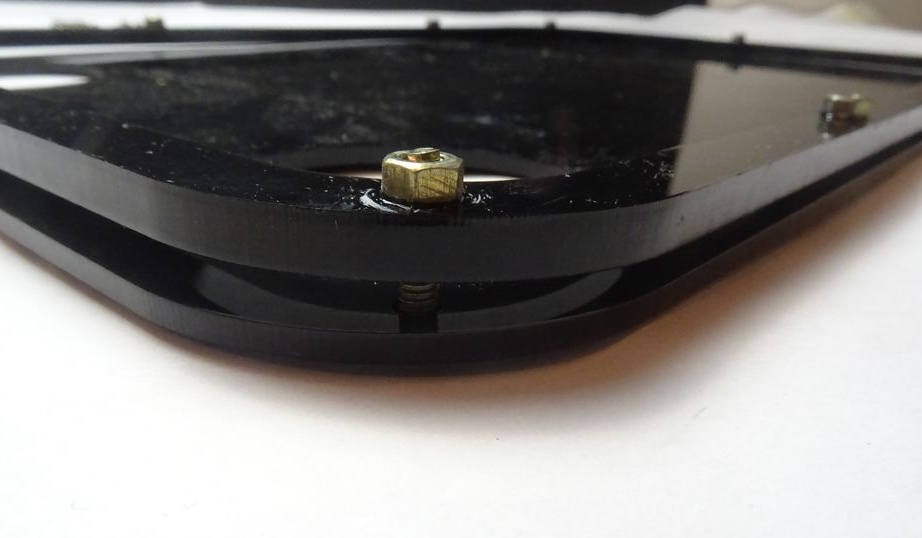
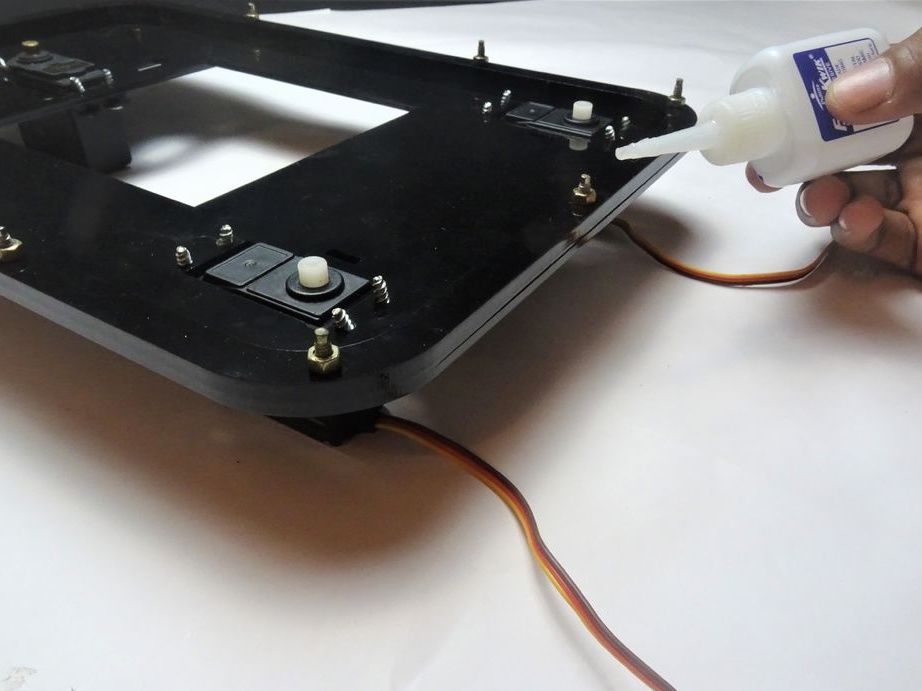
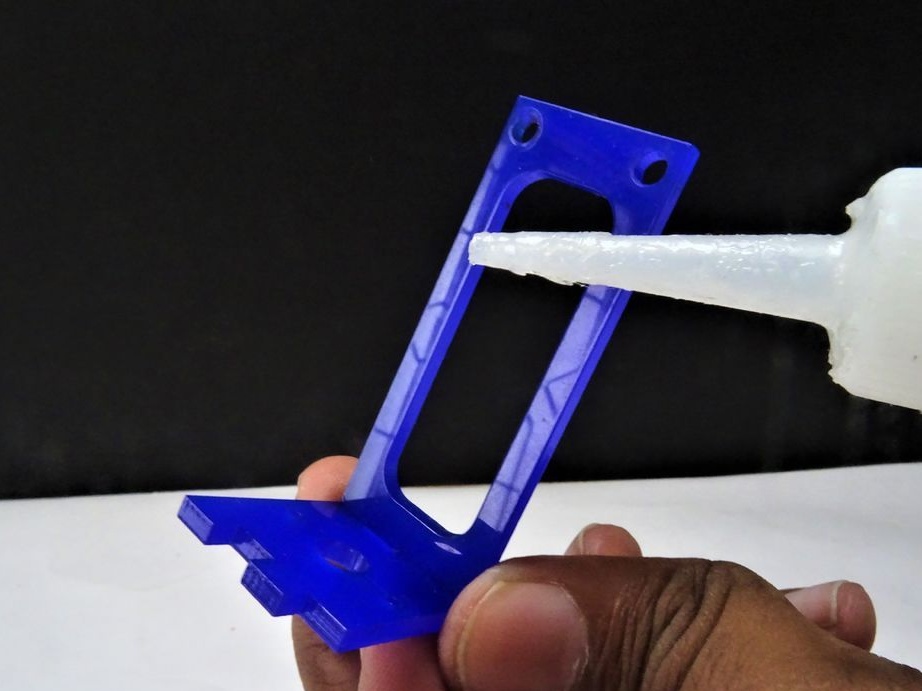
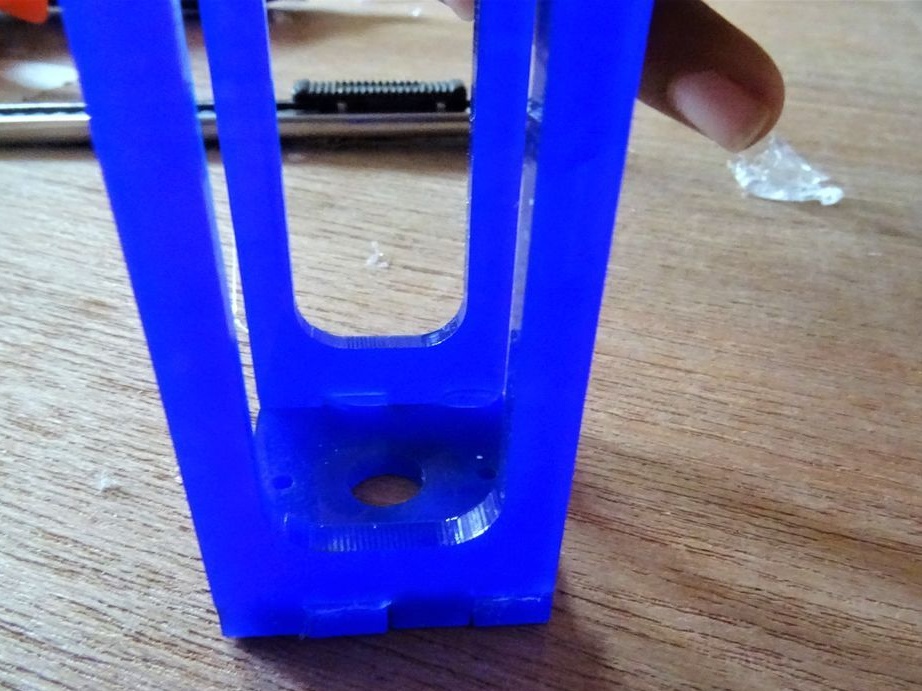
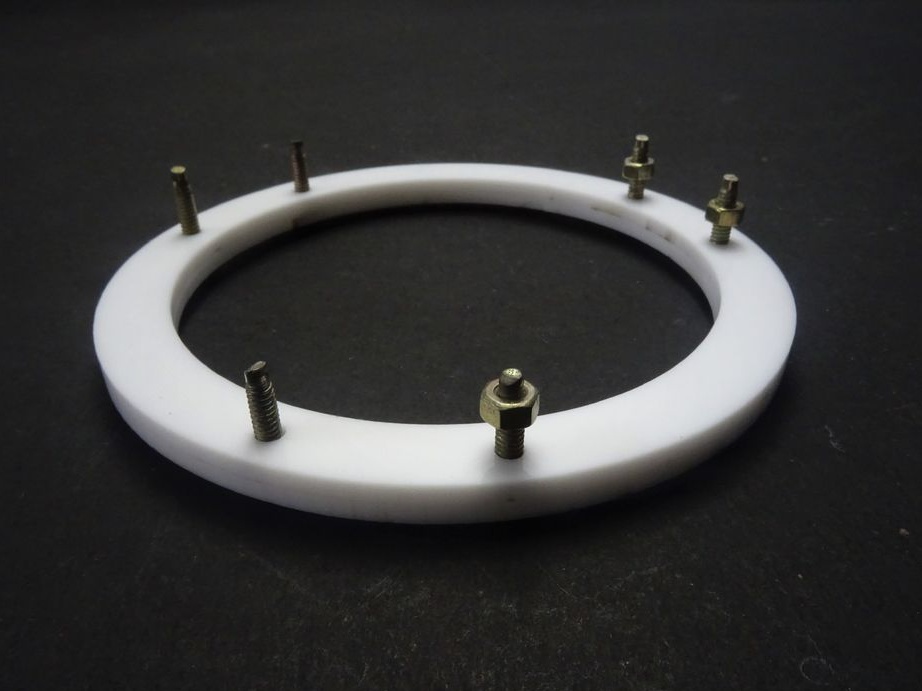
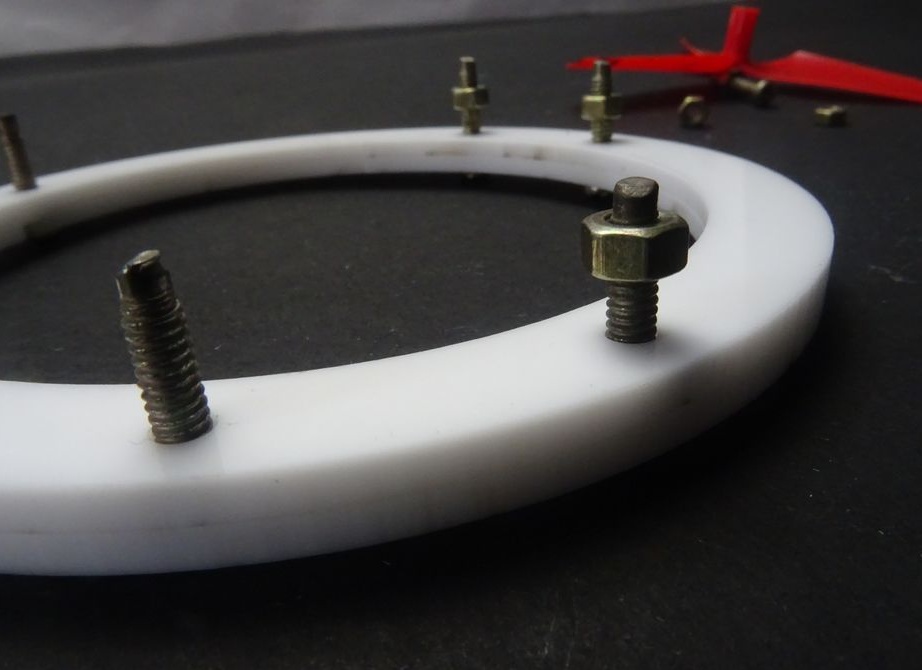
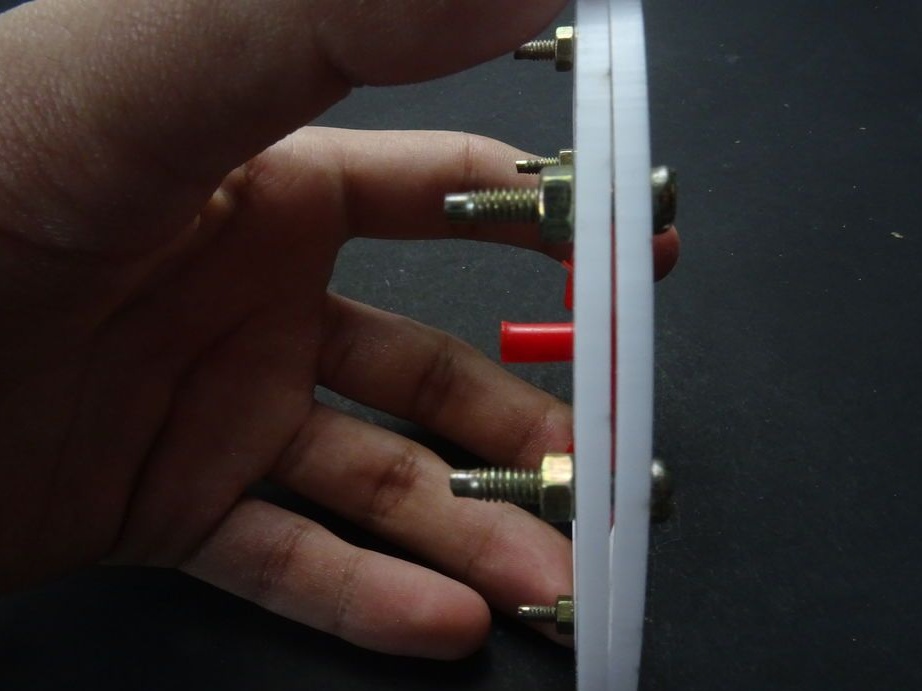
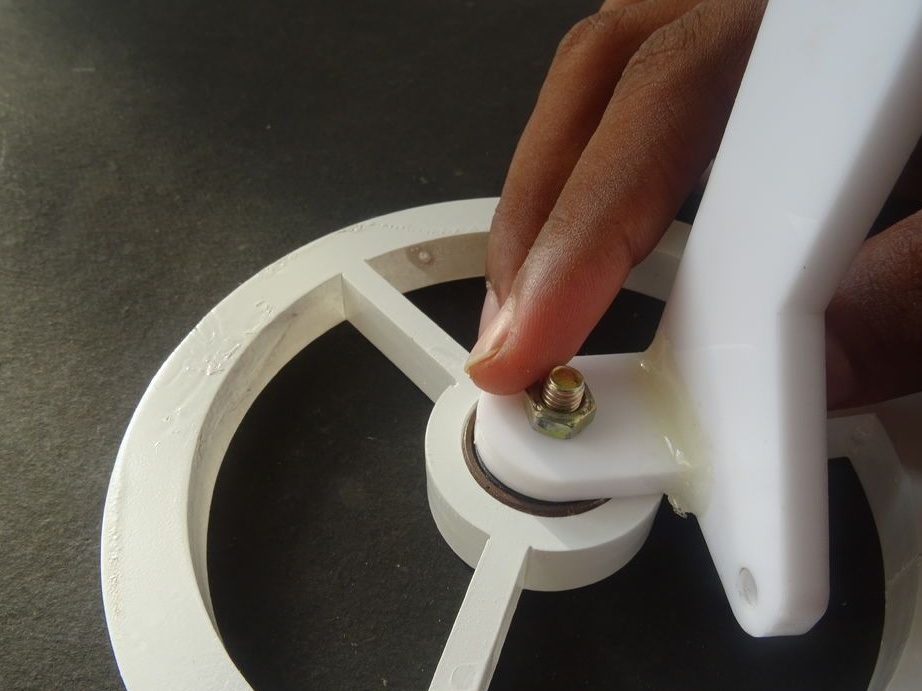
Trinn fire: nøtter
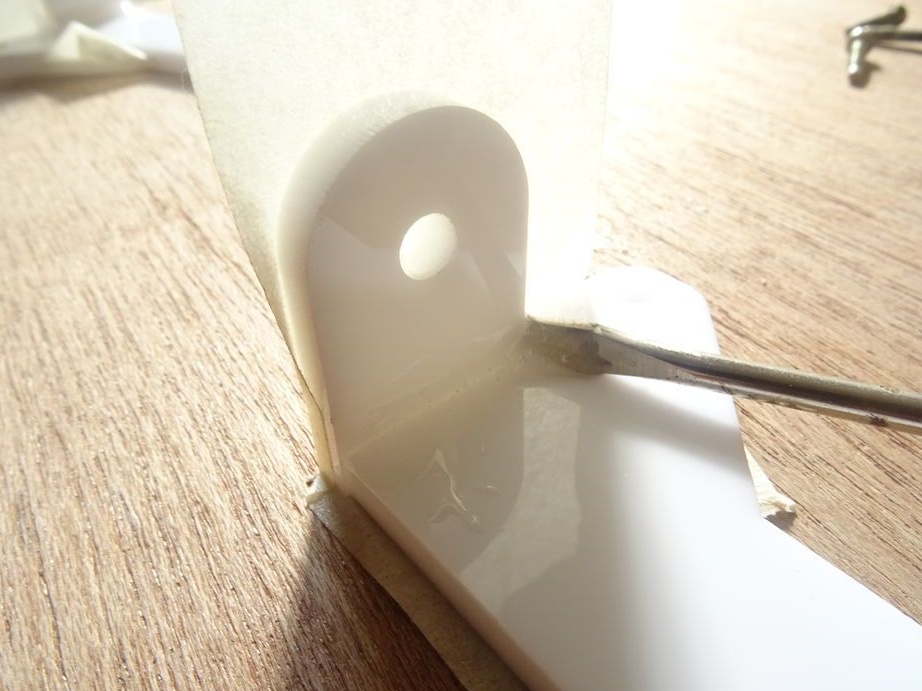
For tilgang til mekanismene er de øvre og nedre delene boltet sammen. Lim nøttene på superlimet til rammen, og forsterker den deretter med epoksy.


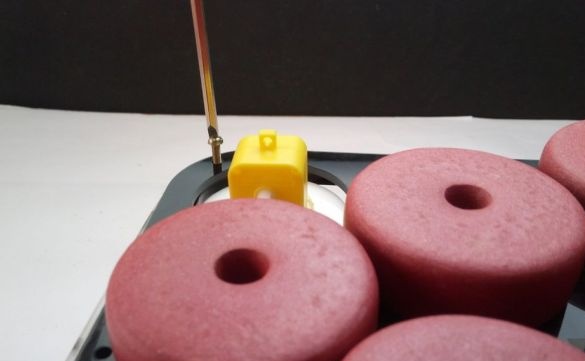
Trinn fem: Flyter
Lim flyter.



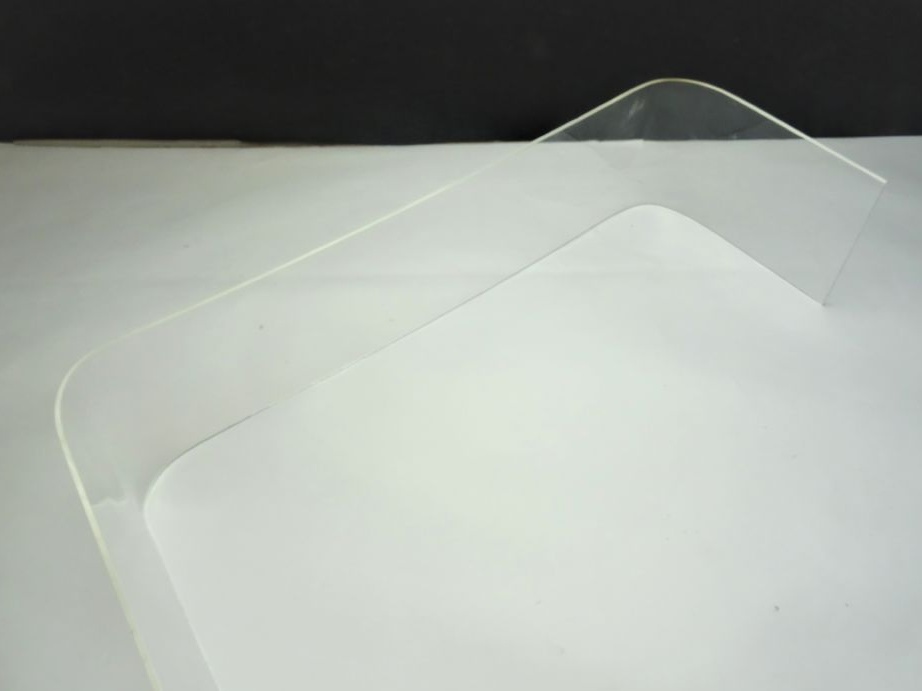
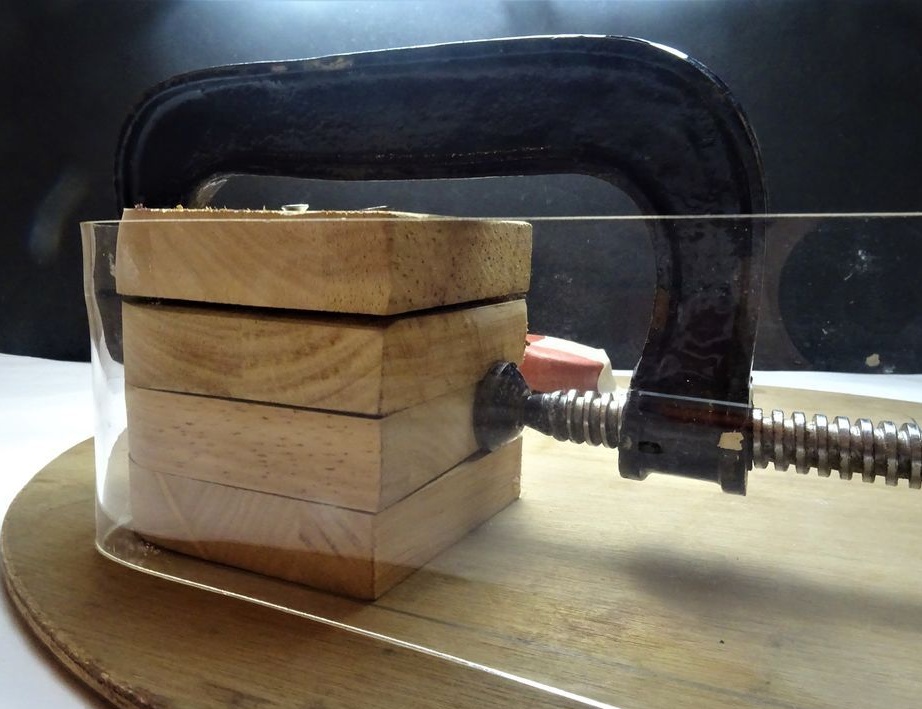
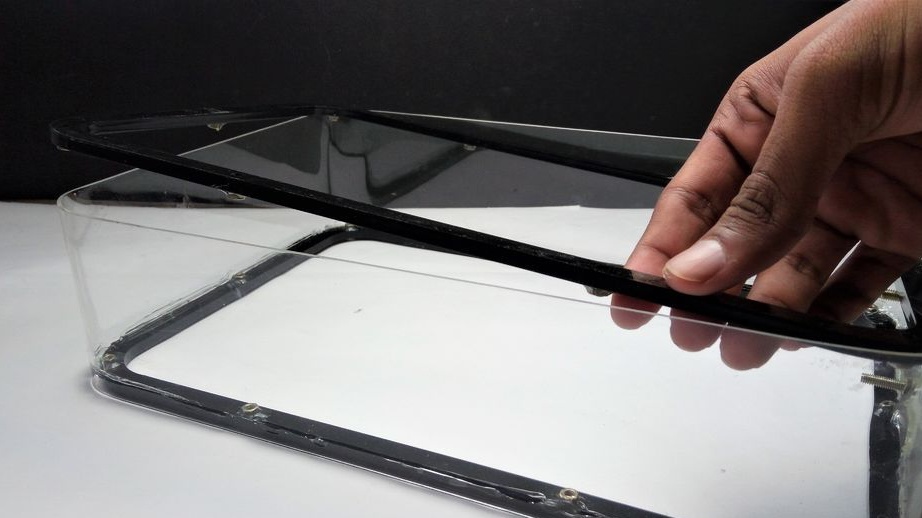
Trinn seks: Forme akryl
For å bøye akryl lager en håndverker en mal fra tre.



Han klemmer delen med en klemme, og oppvarmer den med en hårføner, gir delen den ønskede formen.





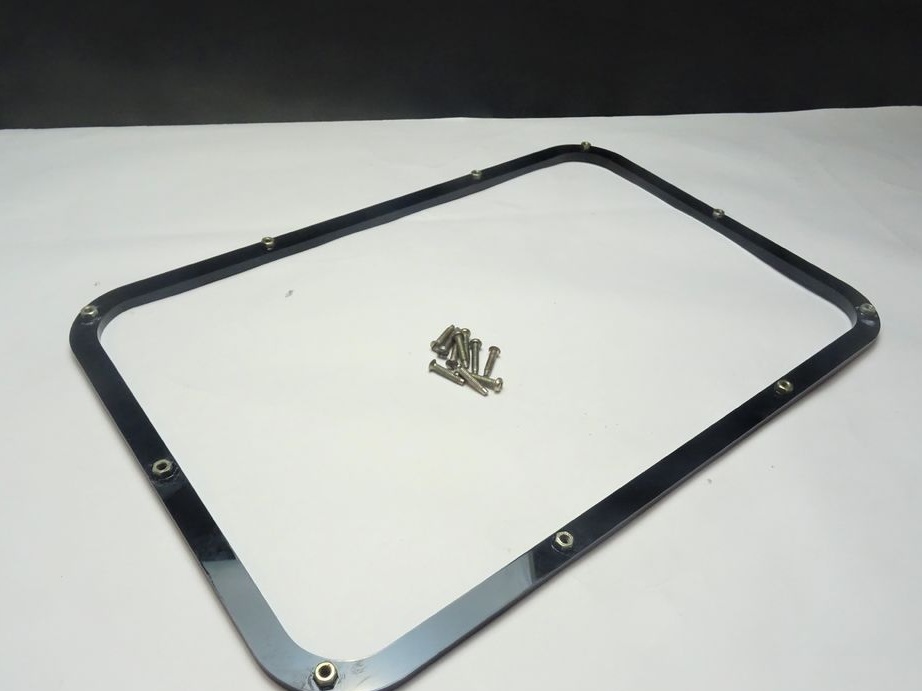
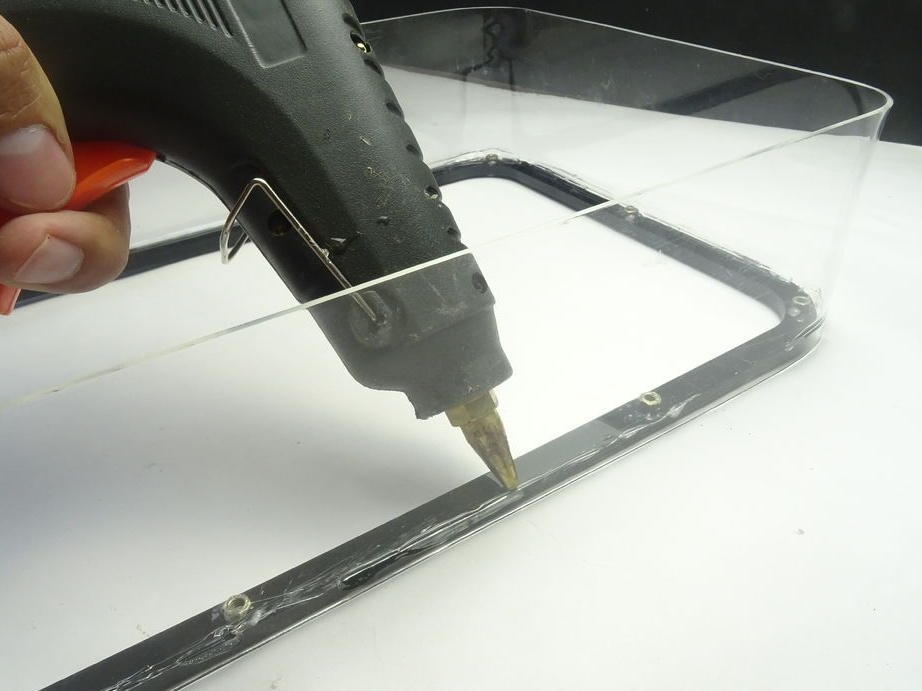
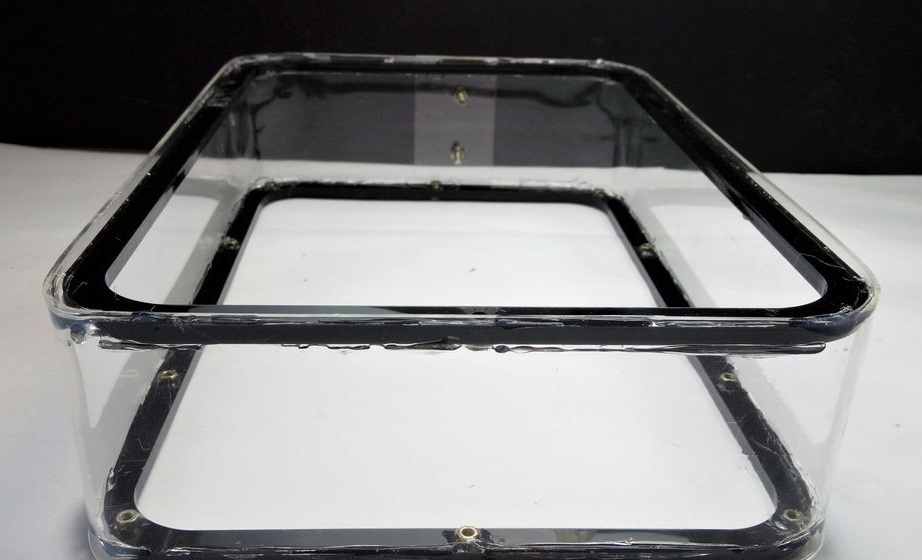
Syvende trinn: rammeverk
Lim de øvre og nedre rammene på det gjennomsiktige kroppen. Sømmene er forsiktig forseglet med varmt lim.







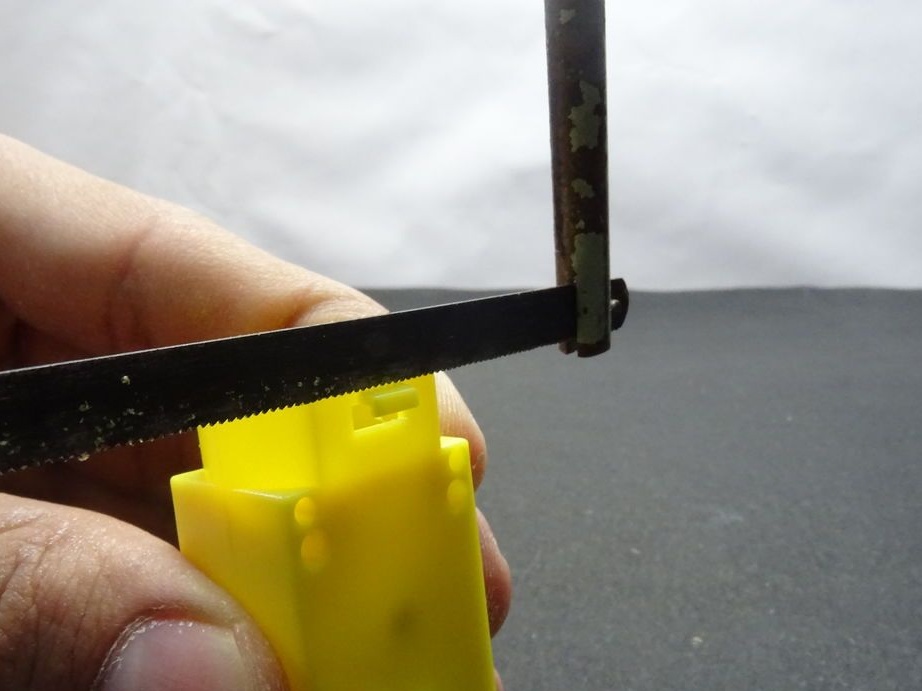
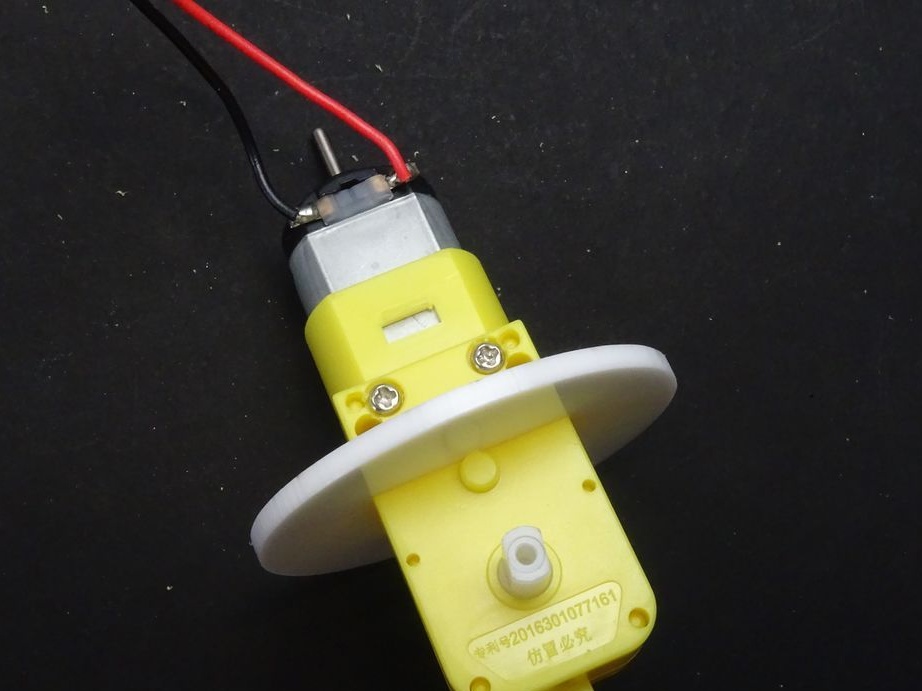
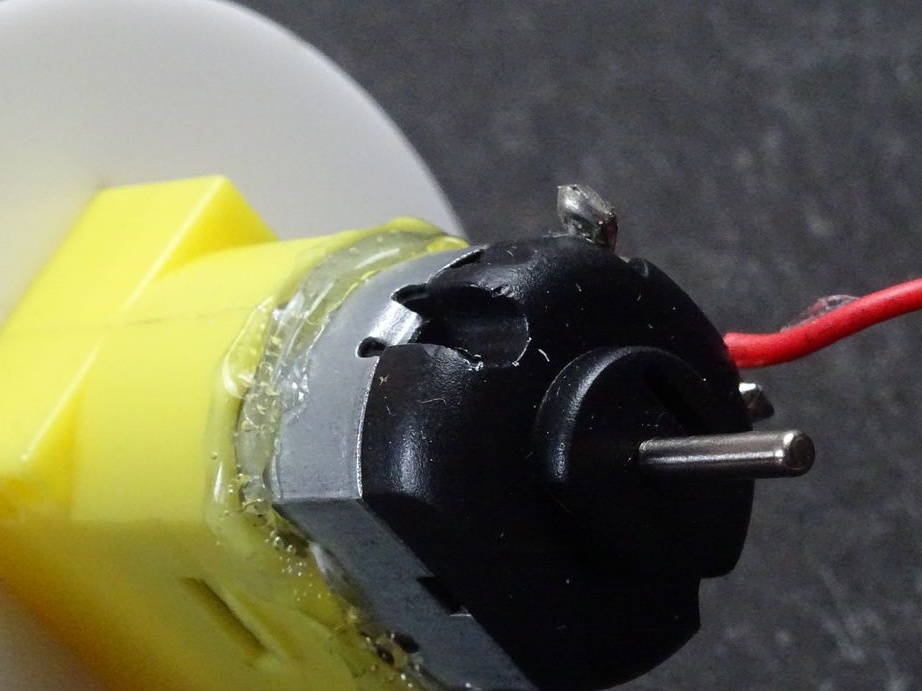
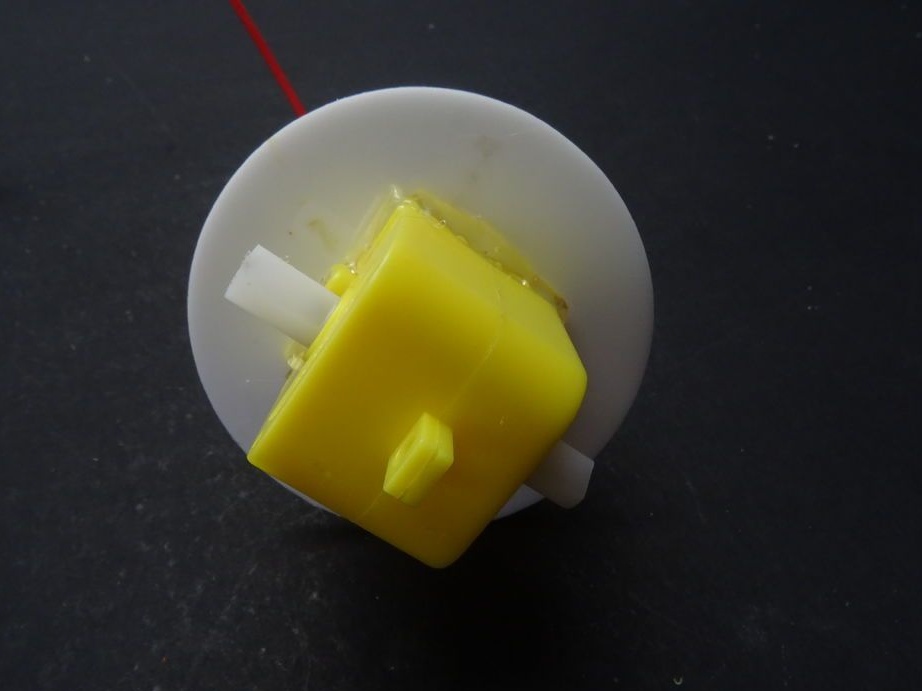
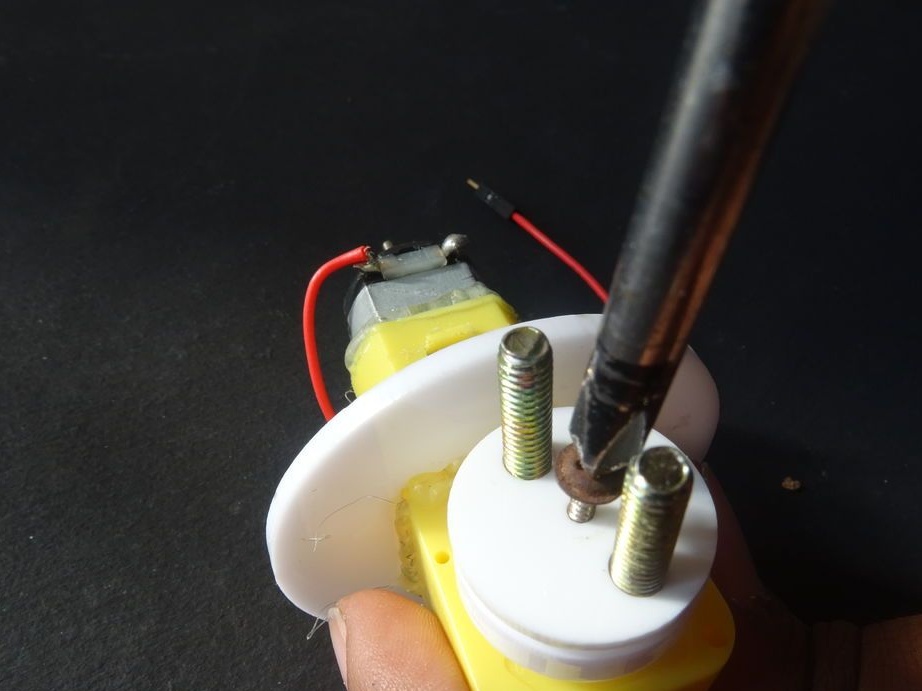
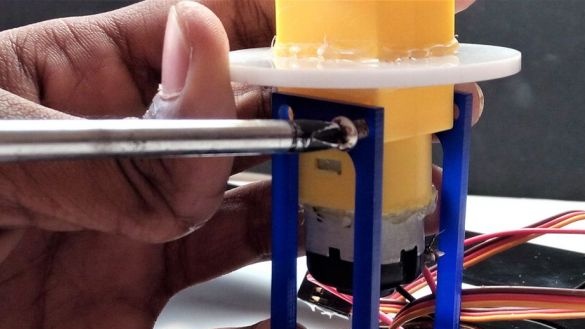
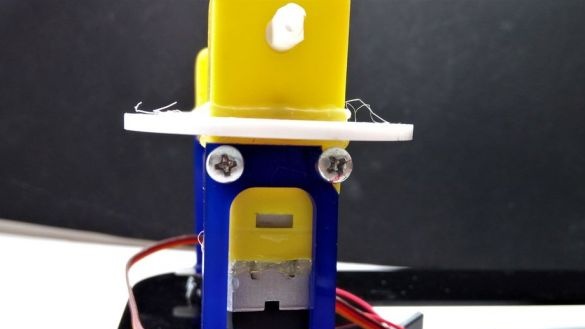
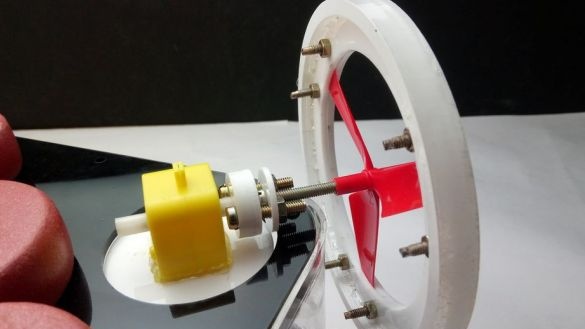
Trinn åtte: Motorinnstilling
Nå må du behandle motorhuset for å installere deler på det.
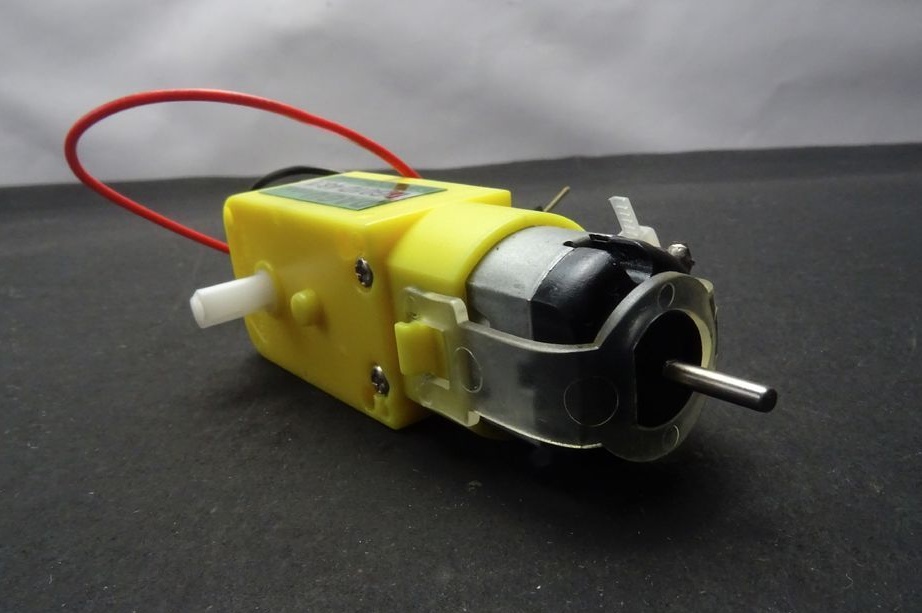
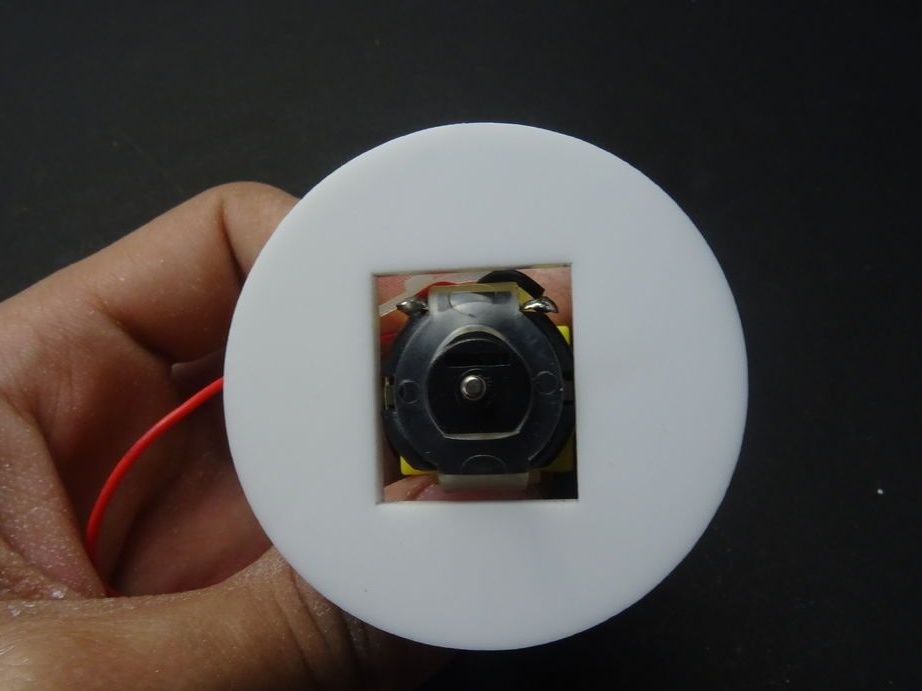
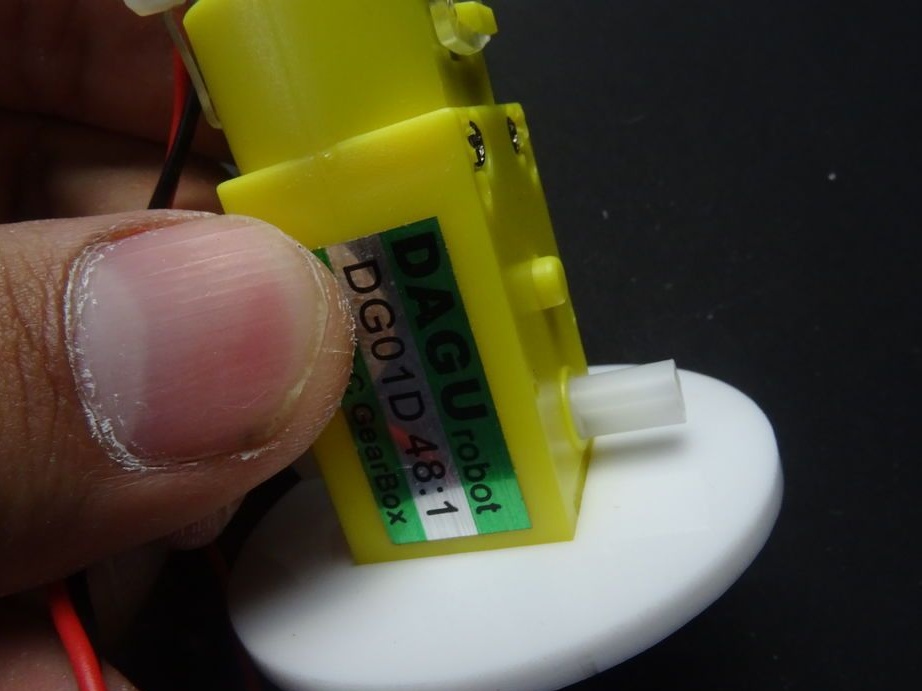

Kutter alle utstående deler fra kroppen, opp til klistremerket.
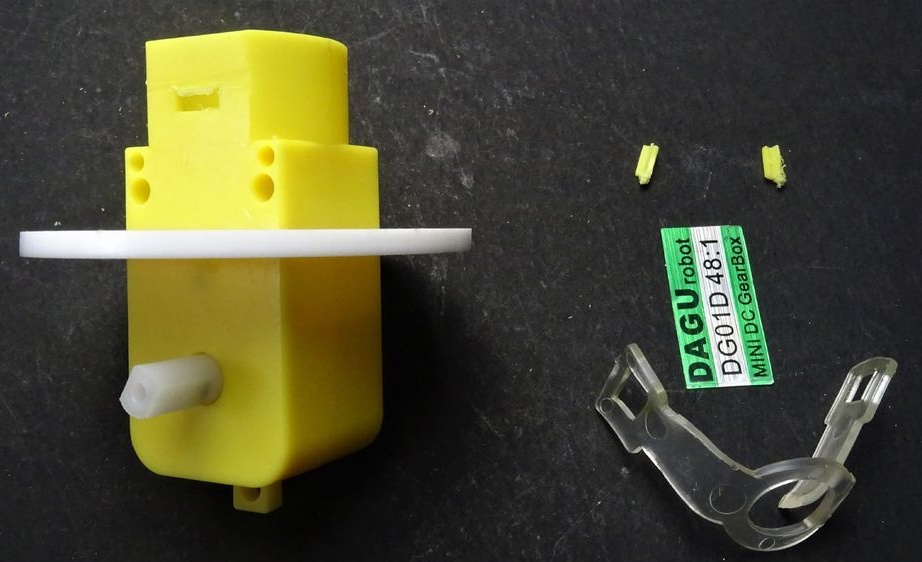

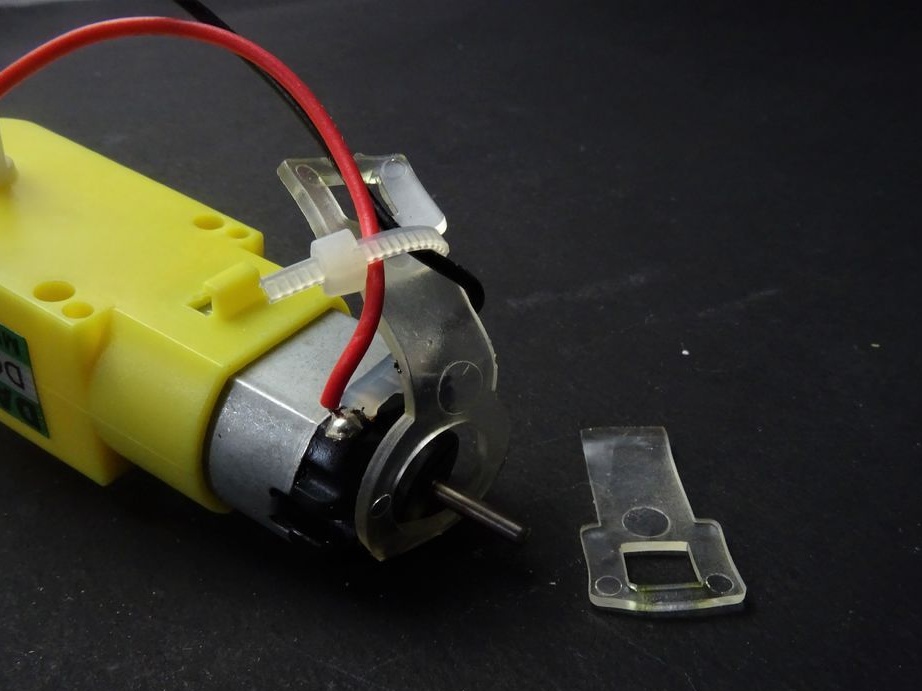


Installerer delen på kroppen og limer den. Siden det var nødvendig å kutte av motorfestet (sperrene), fikseres motoren også med lim.

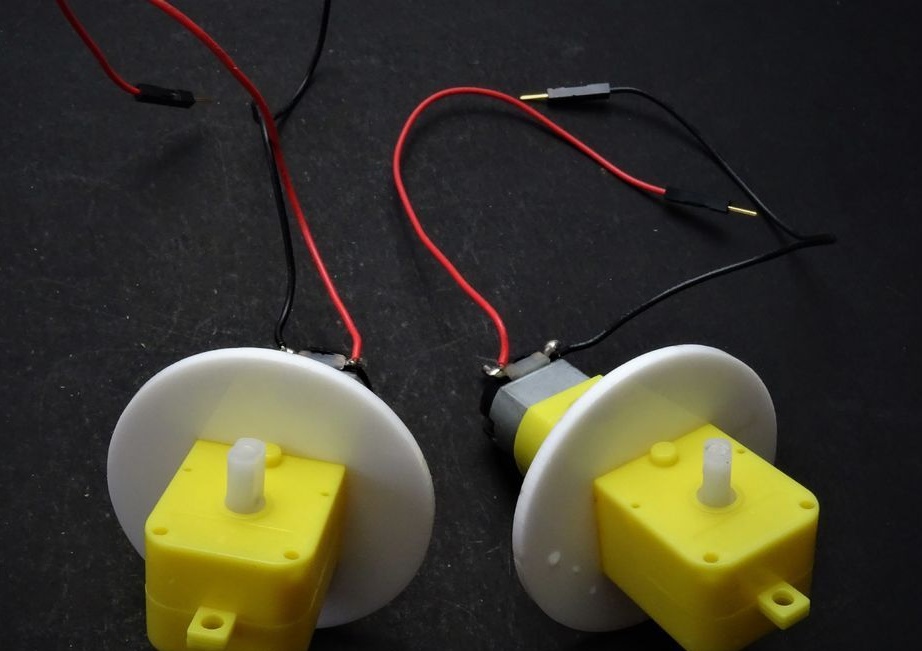

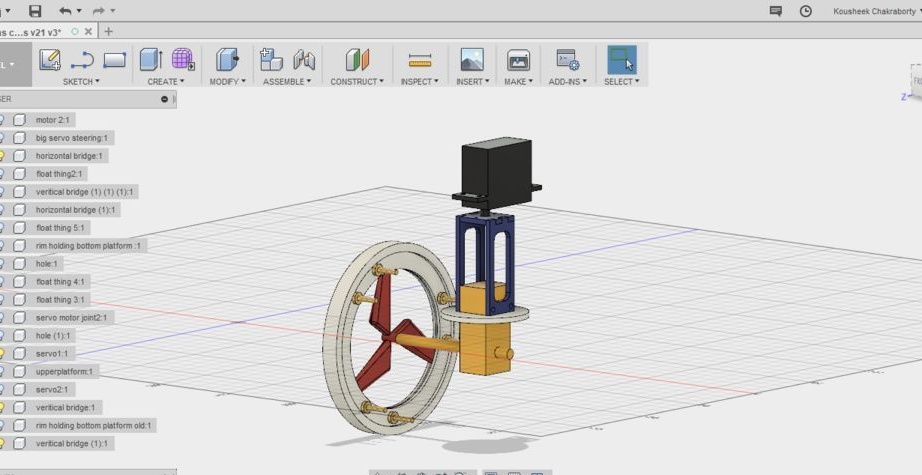
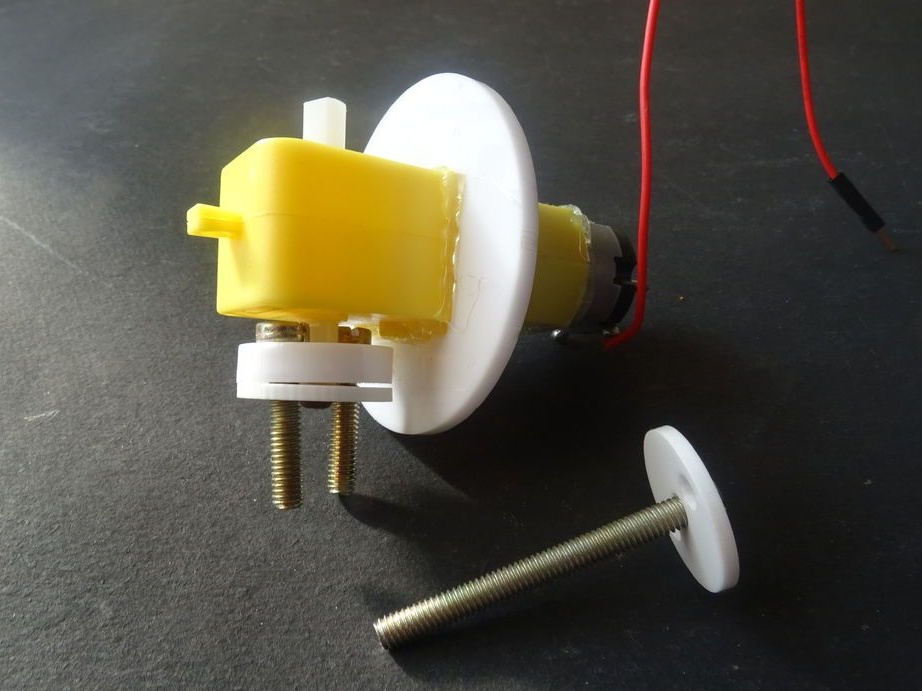
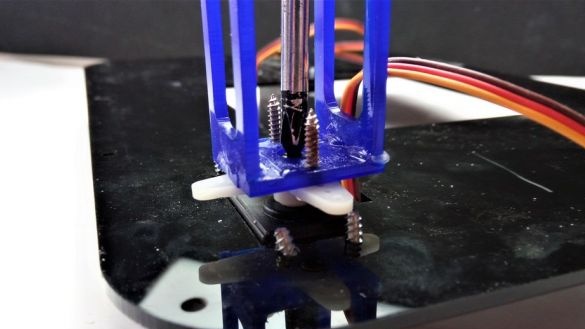
Trinn ni: Dreiemekanisme
Monterer et rotasjonshus. En motor vil bli installert i den, og den kobles til servodrevet.
Limer saken.

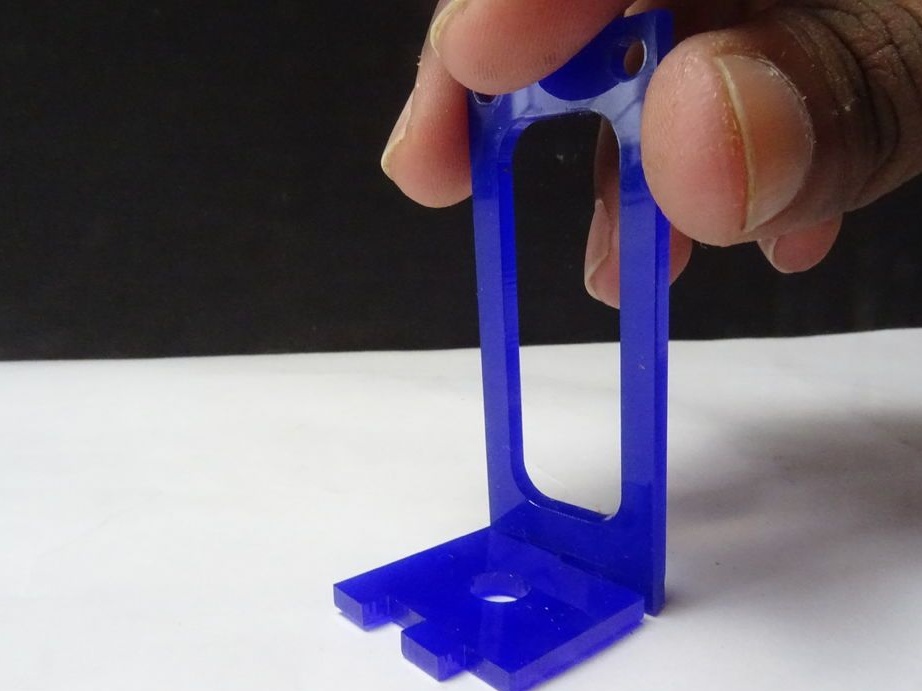

Skruer på koblingen.


Trinn ti: Maleri
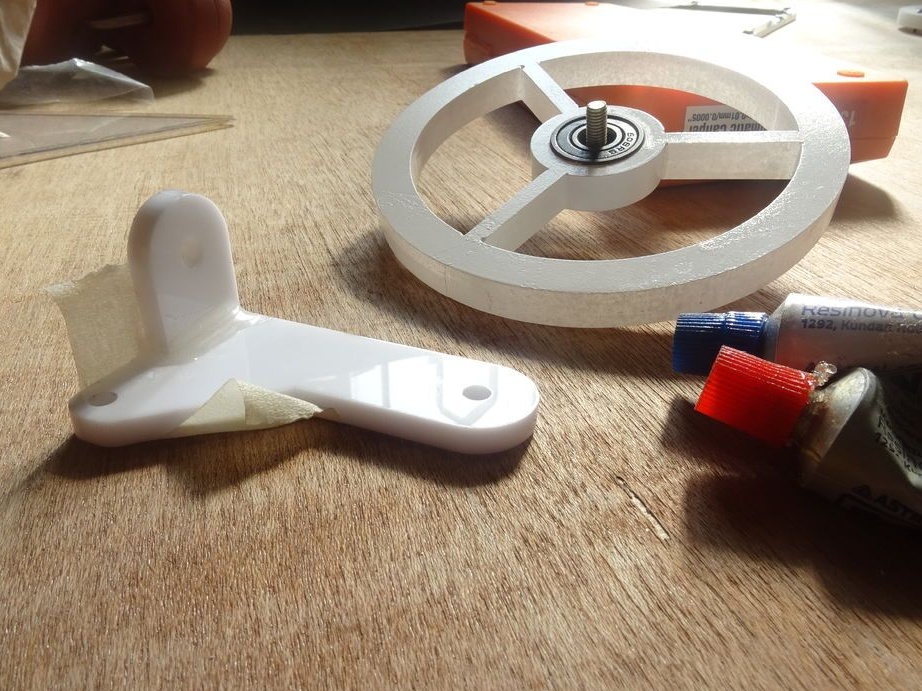
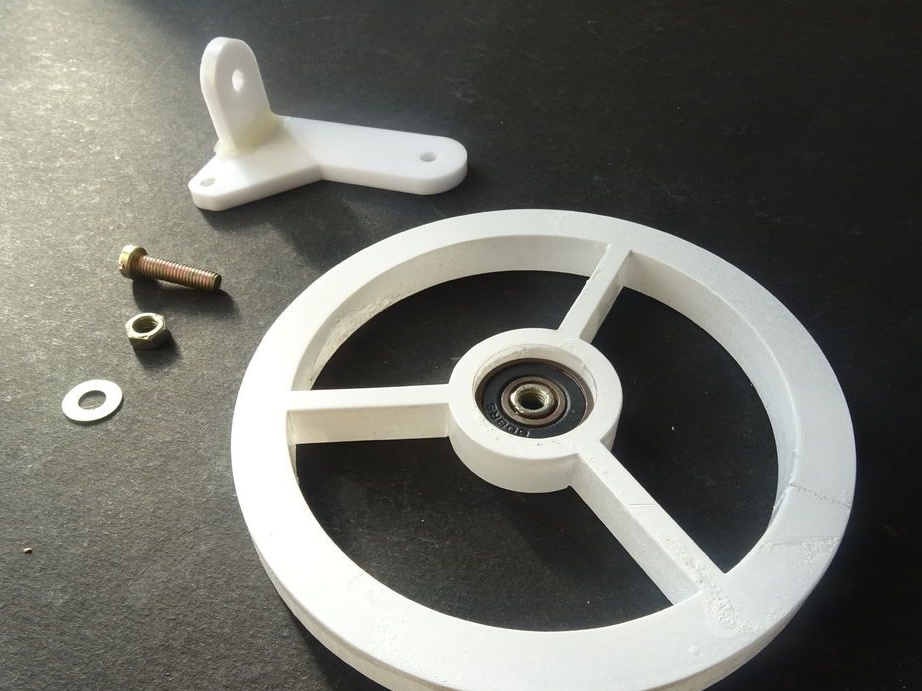
Siden mesteren ikke hadde hvit akryl med ønsket tykkelse, ble hjulene og kanten kuttet ut av gjennomsiktig akryl og deretter malt hvitt.




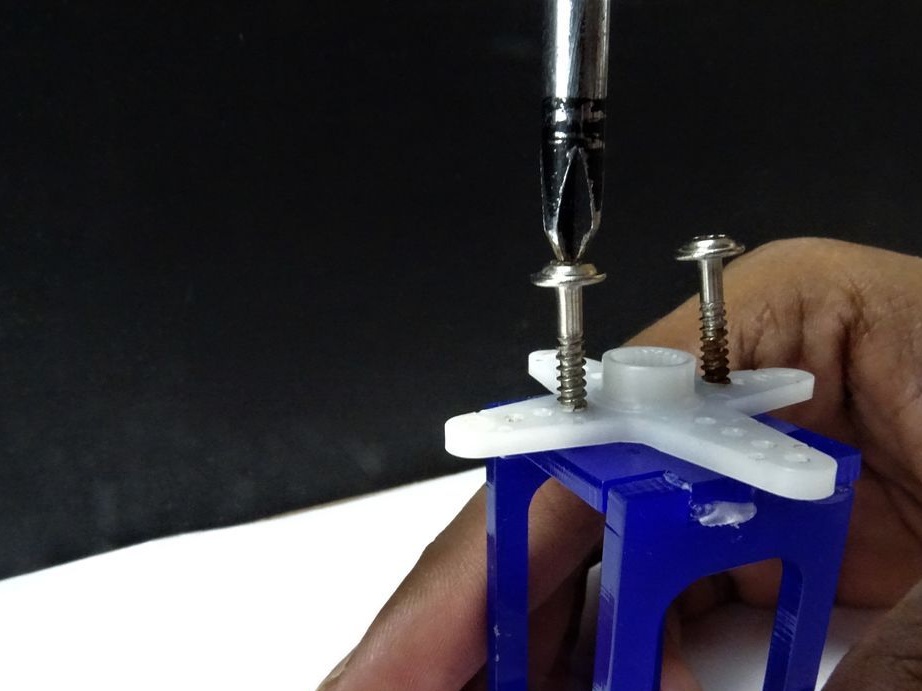
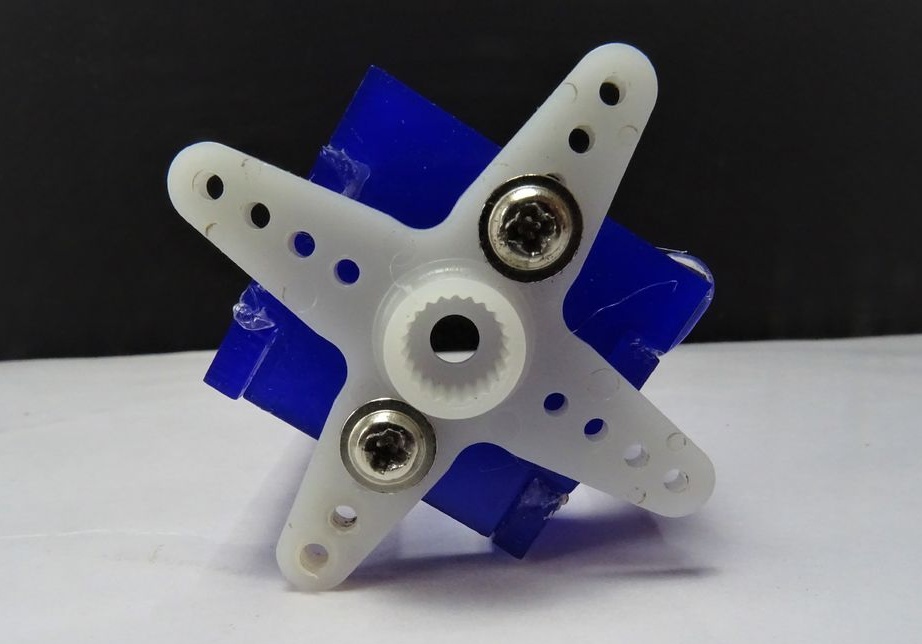
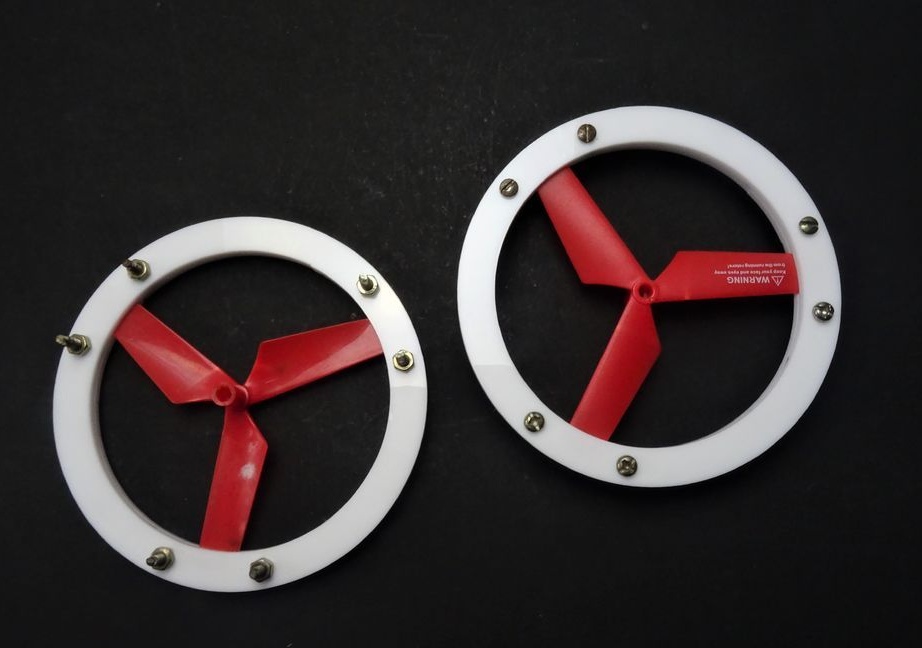
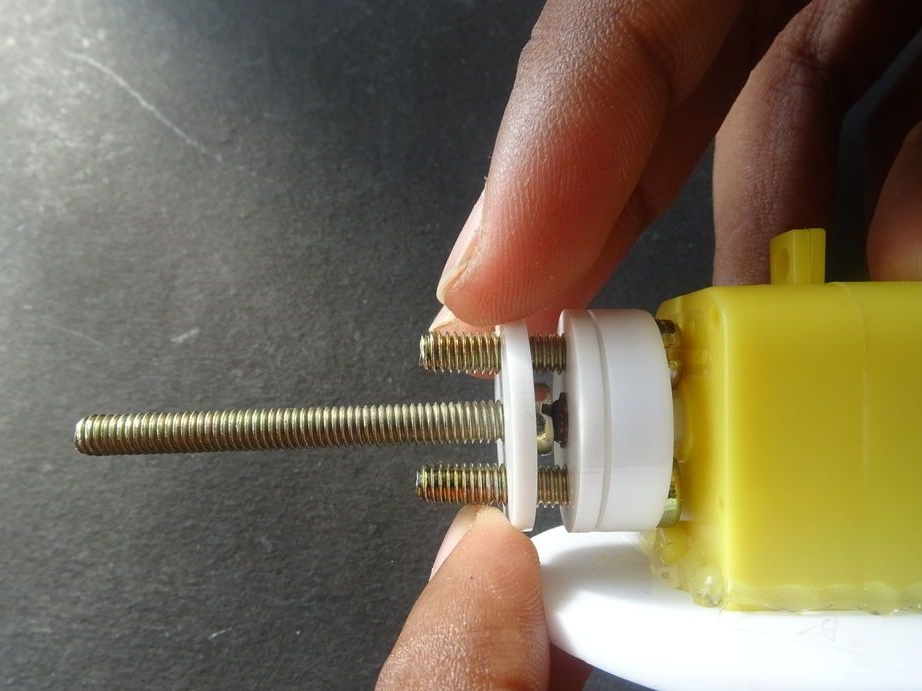
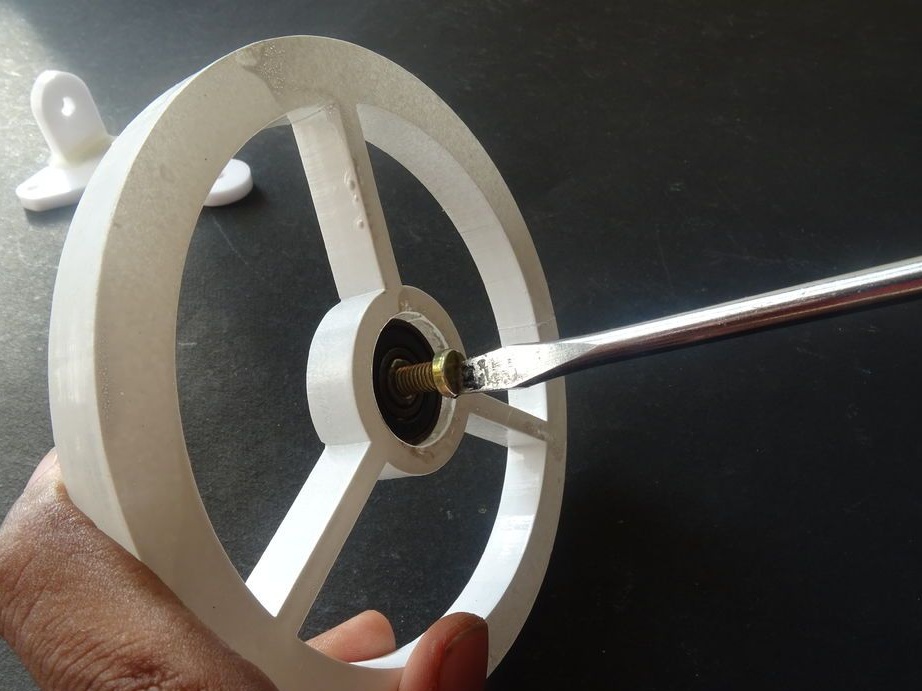
Trinn elleve: Hjulmontering
På bolter samler to hjulfelger. Skruene er ikke helt strammet.




Mellom skivene installeres skruer og stram skruene. Når du installerer skruen, må du bruke malen til å sentrere den.
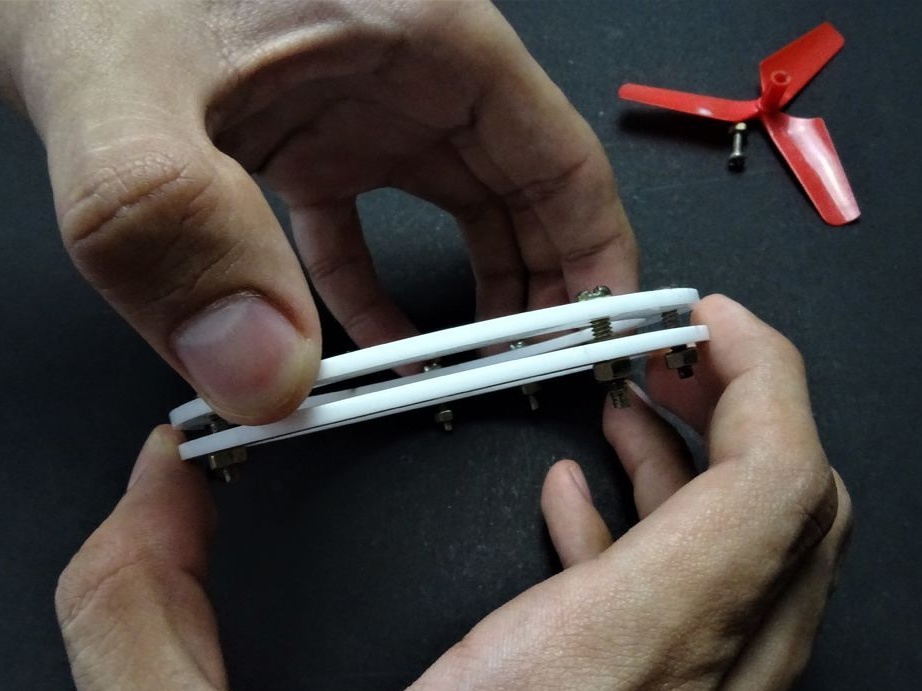
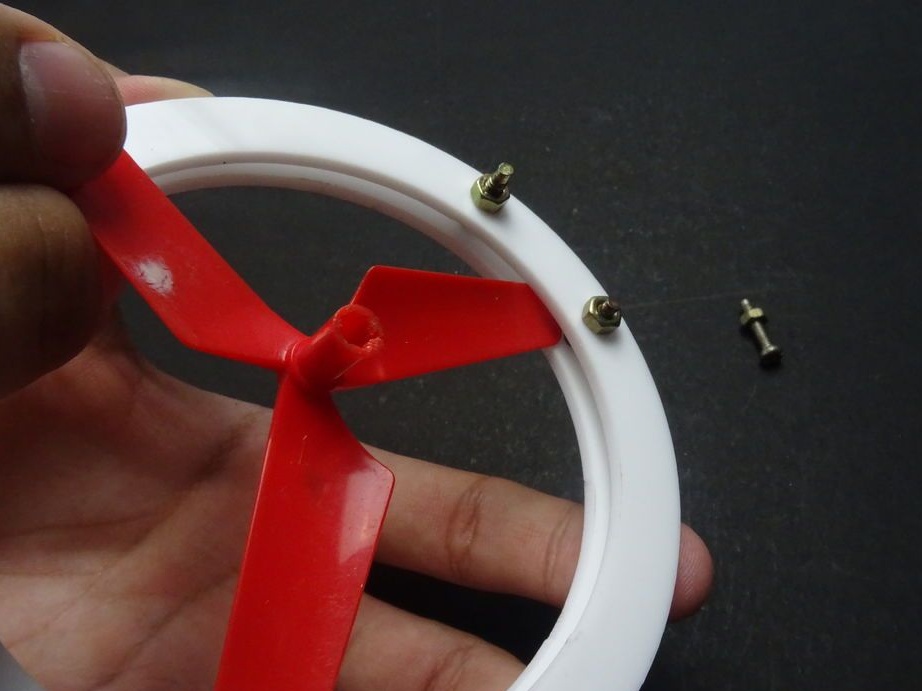
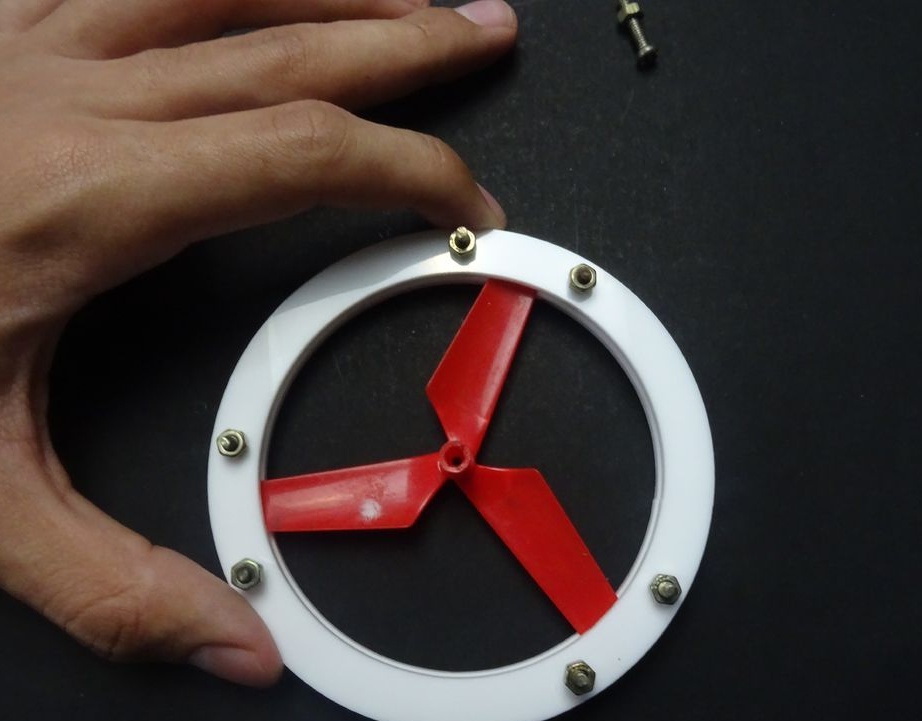

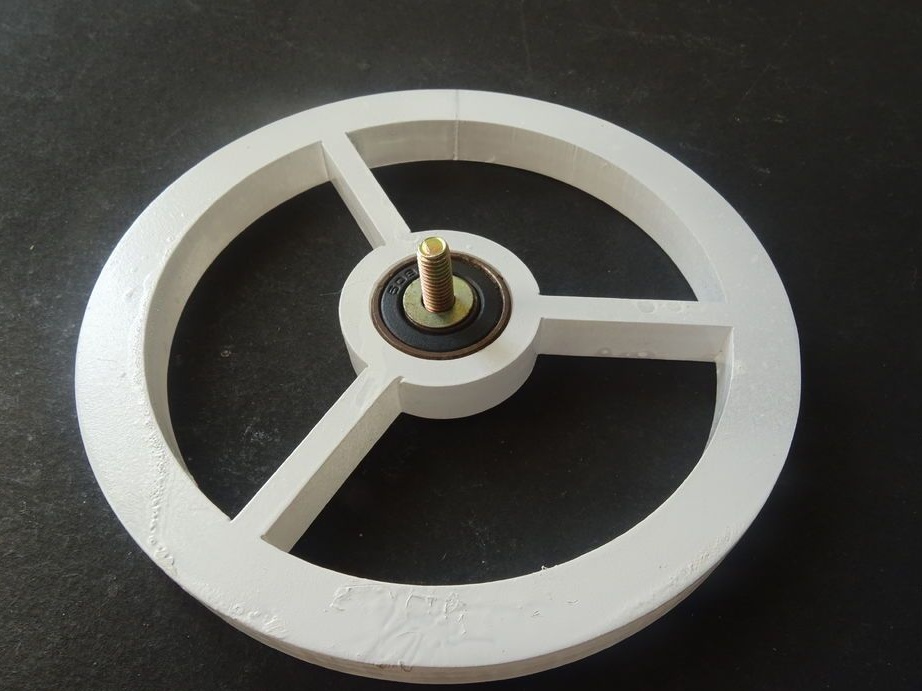
Innstiller den ytre kanten av hjulet. Felgen må være i flukt med den interne disken.
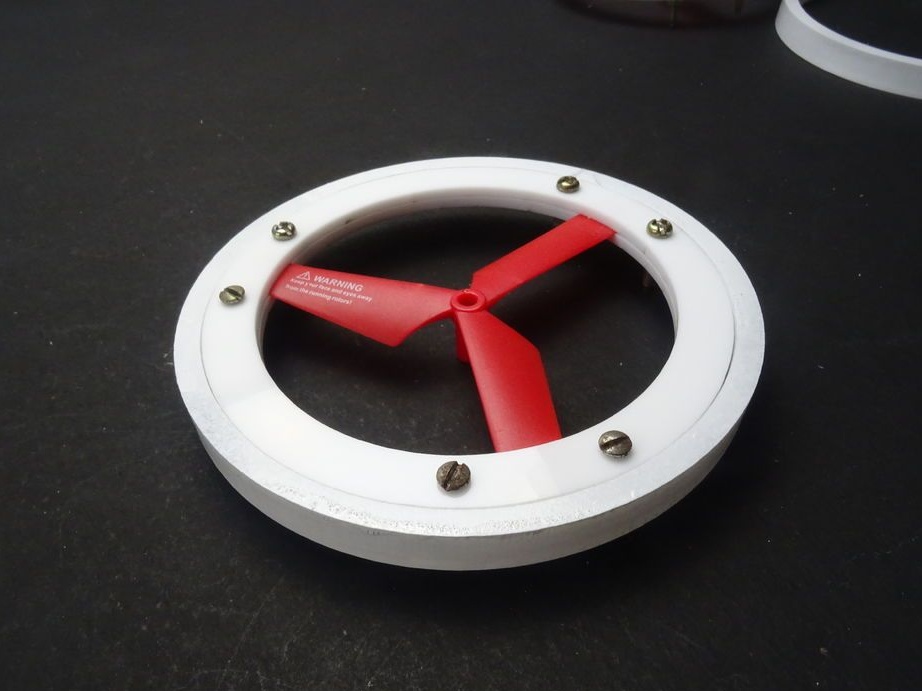

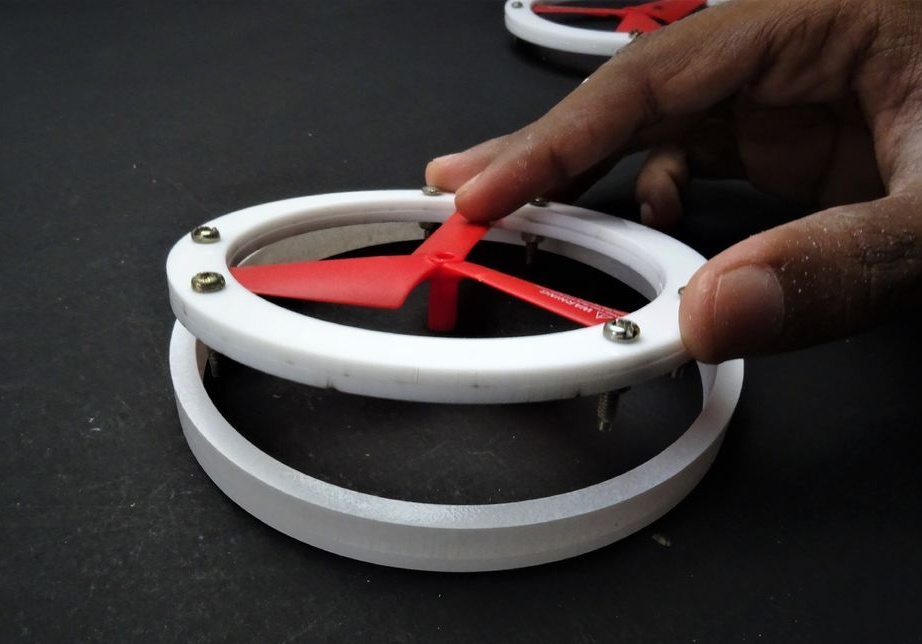
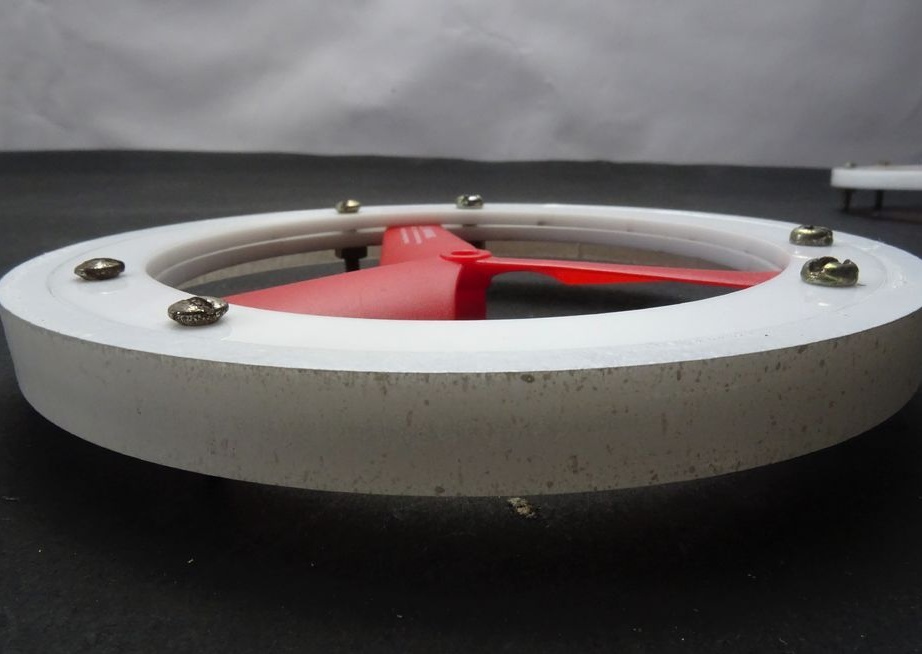

Påfør varmt lim på skjøten.


Samler nå forhjulene.
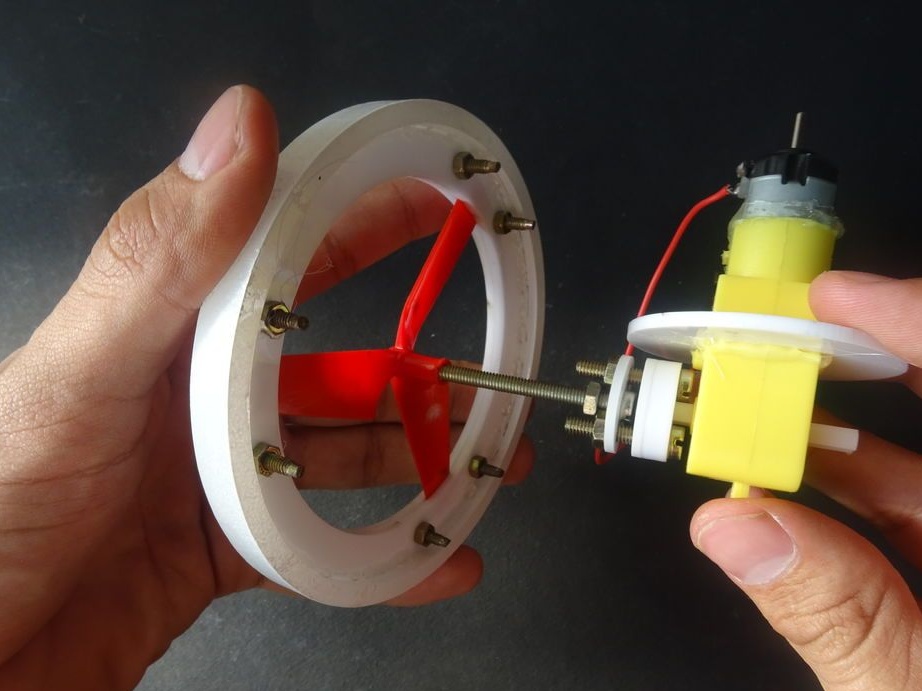
En mutter i passende størrelse tetter seg inn i lagerets indre løp. Presser kulelager inn i forhjulene.



Hjulene er klare.

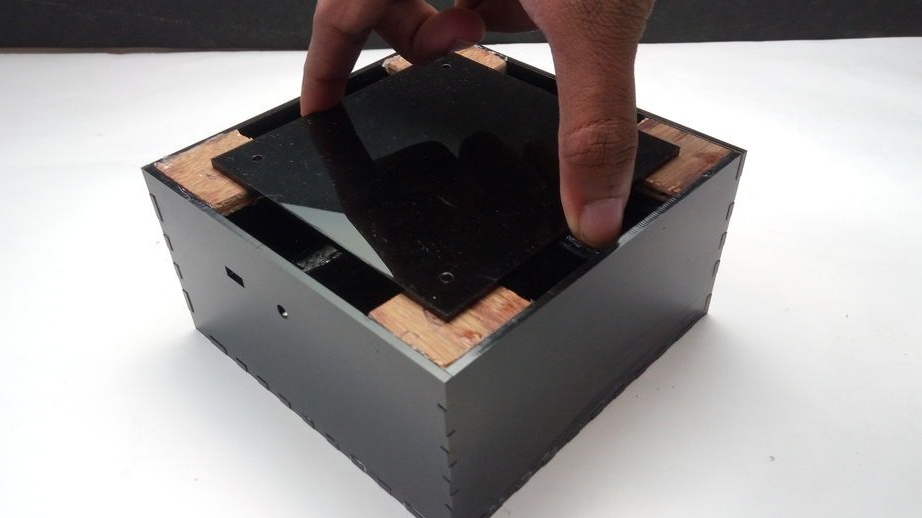
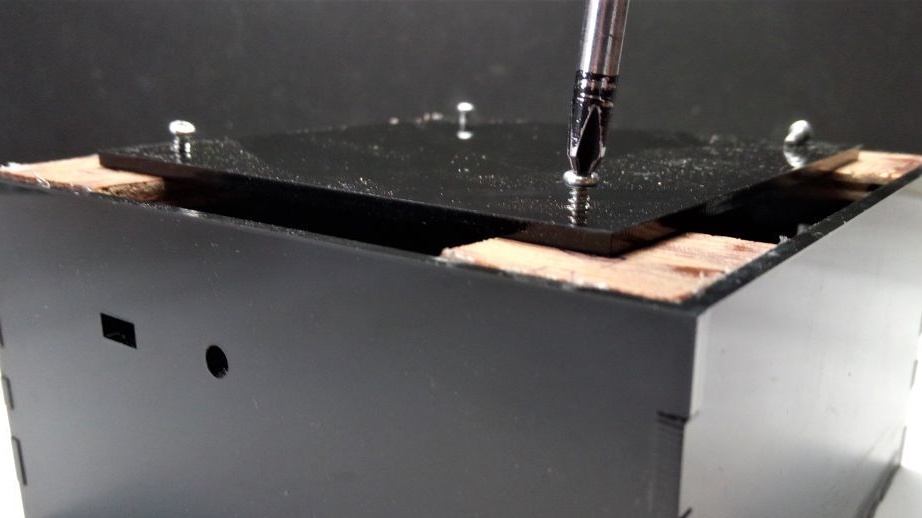
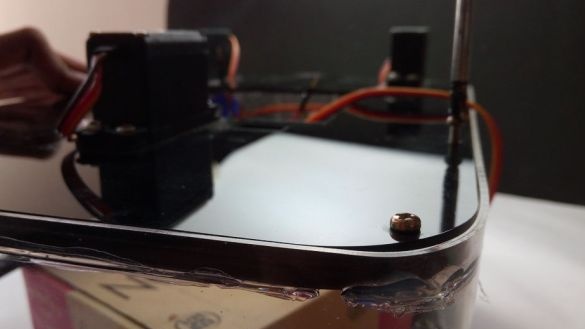
Trinn tolv: Elektronisk kabinett
Lim husene for elektronikken.
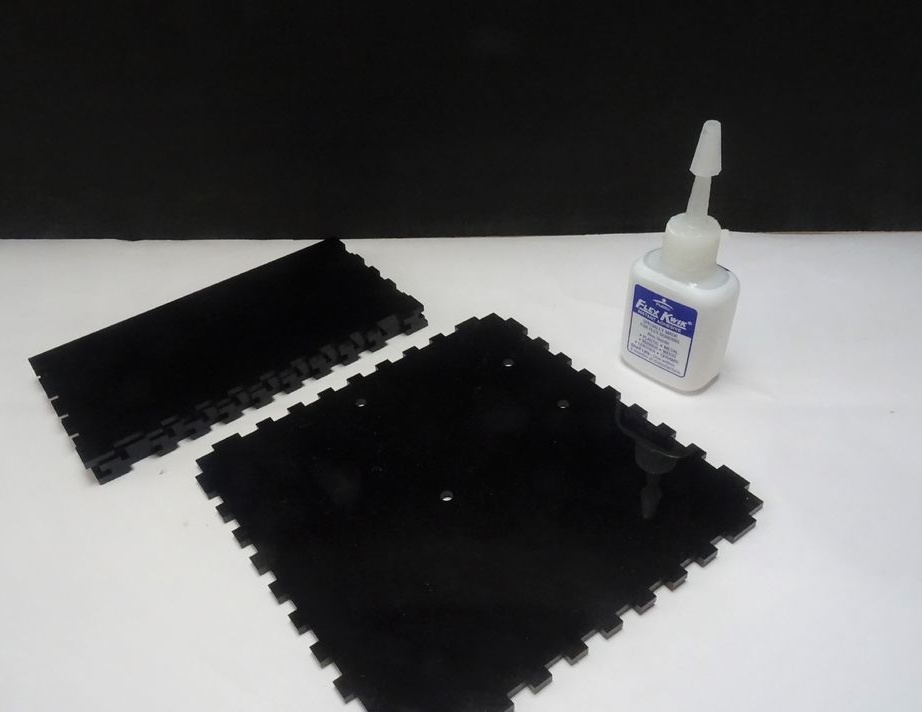
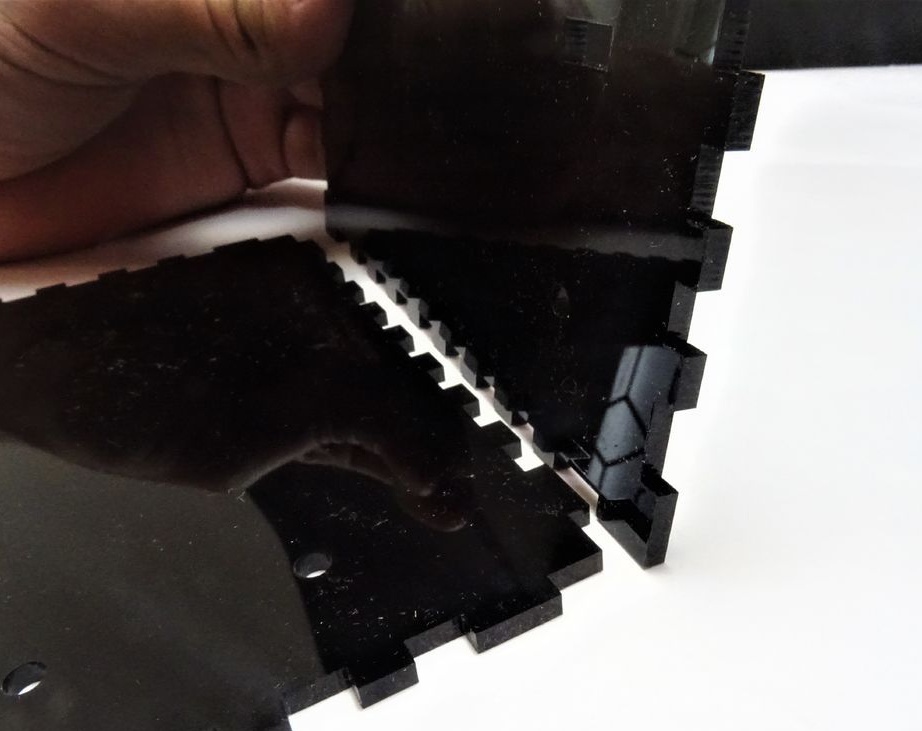

Denne boksen vil inneholde alt elektronisk komponenter, noe som betyr at den må vanntettes så grundig som mulig.


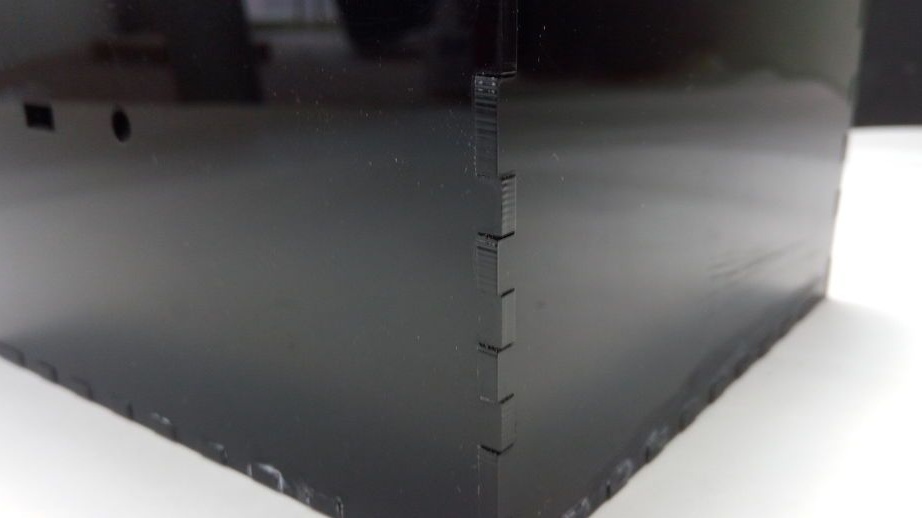
Fire firkanter kuttes og limes fra brettet i hjørnene av boksen. Bokslokket vil være festet til dem.



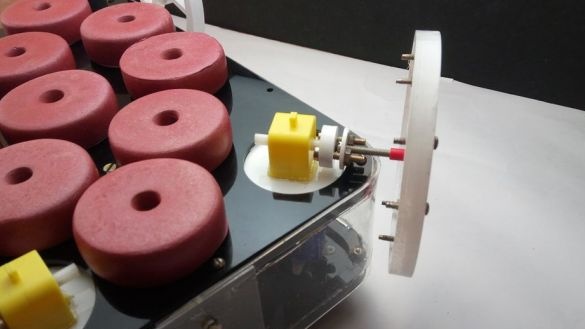
Trinn tretten: Hjulmontering
Nå må du koble hjulene og giret med en clutch.





Skruer forhjulene til trekkraft.


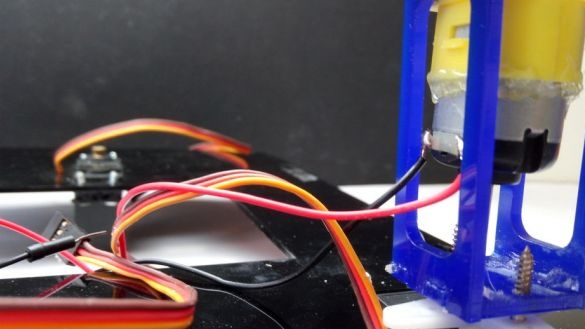
Trinn fjorten: Koble til elektronikk
I henhold til ordningen installerer den elektriske deler.
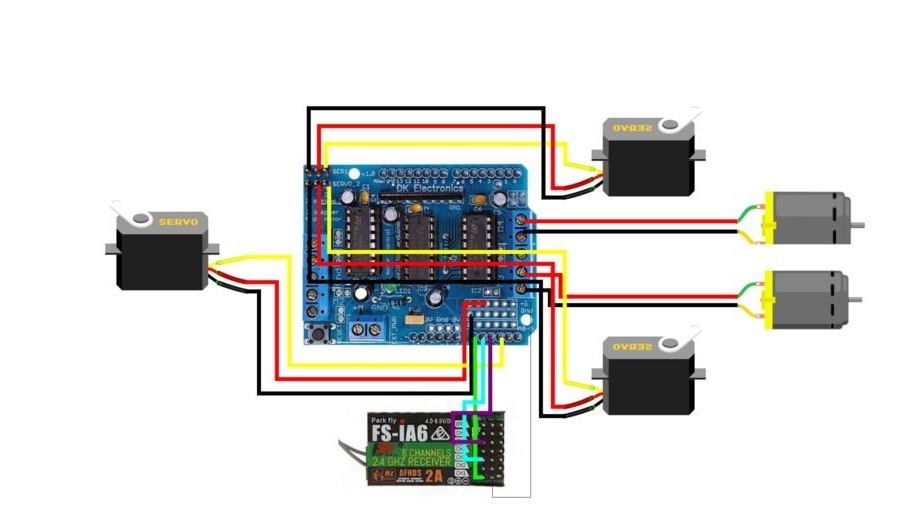

Ledningene til venstre motor til M1, høyre til M2. Kobler til en motorfører. Kobler servoer. Installerer mottakeren: gnd av mottakeren til gnd Arduino; +5 V-mottaker til +5 V Arduino; pinne 3 til A0; pinne 1 til A1; pinne 5 til A2. Kobler batteriet.
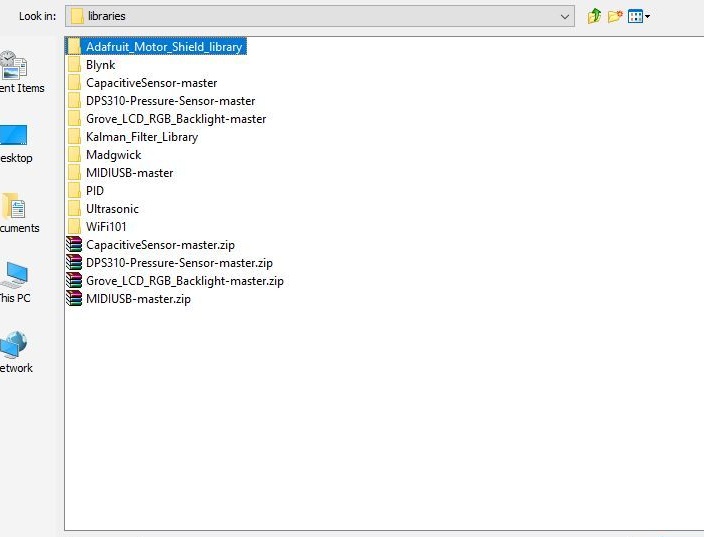
Trinn femten: Last ned kode
Først må du laste ned biblioteket.
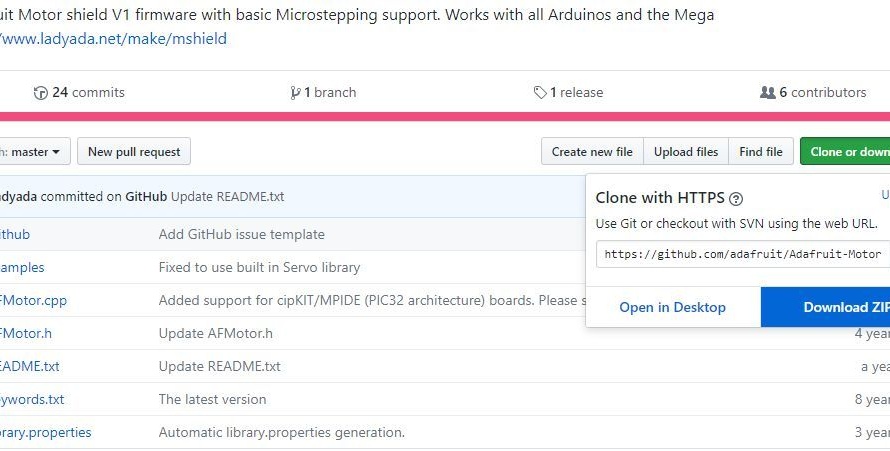
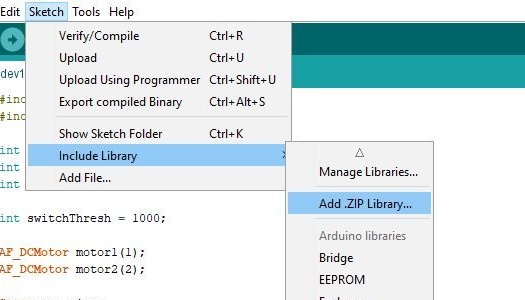
Last deretter ned koden. Når du legger i batteriet, skal batteriet kobles fra.
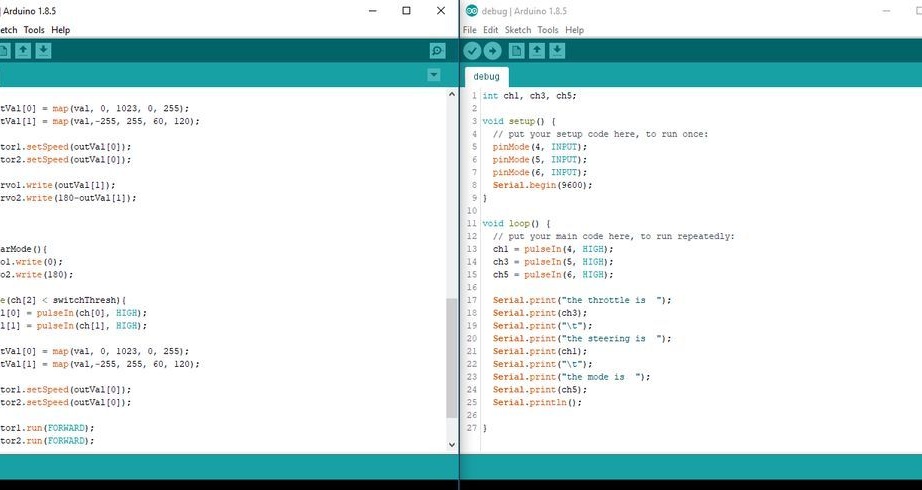
Last ned koden nedenfor.
amphibious_rover_code.ino
Etter å ha lastet ned koden, kontrollerer den driften av motorer og stasjoner.
Trinn seksten: montering
Nå er det på tide å sette sammen terrengkjøretøyet.
[center[/ sentrum]
Installerer servoer. Installerer girmotorer.

Fest hjulene. Vri begge kroppens halvdeler.






Alt er klart, og nå kan du teste.