


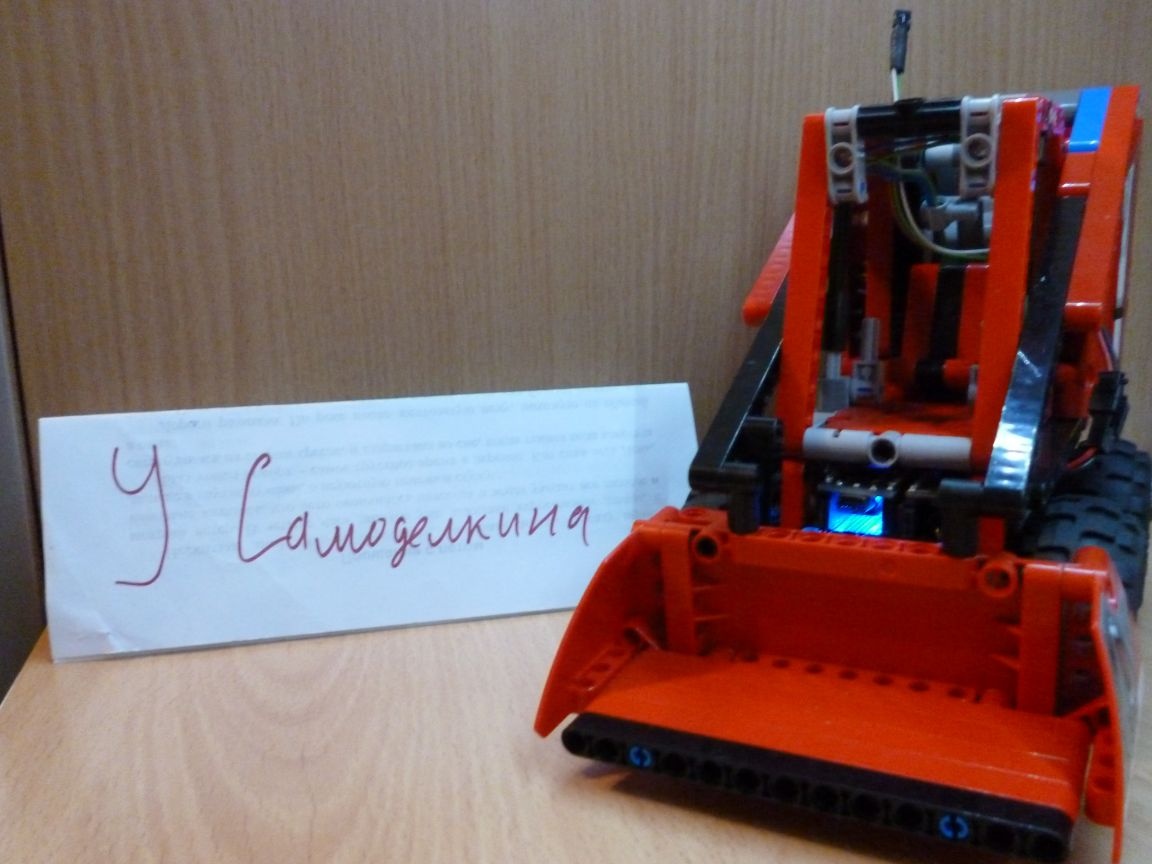
Så, tar legoteknikk fra sønnen min, og hjemme Arduino Nano begynte å kombinere disse designerne.
Vi trenger:
- Lego Technic (sett 42029 og 42033)
- Arduino Nano (lenke til styret)
- DRV 8833
- 2 servostasjoner SG-90
- IR-mottaker
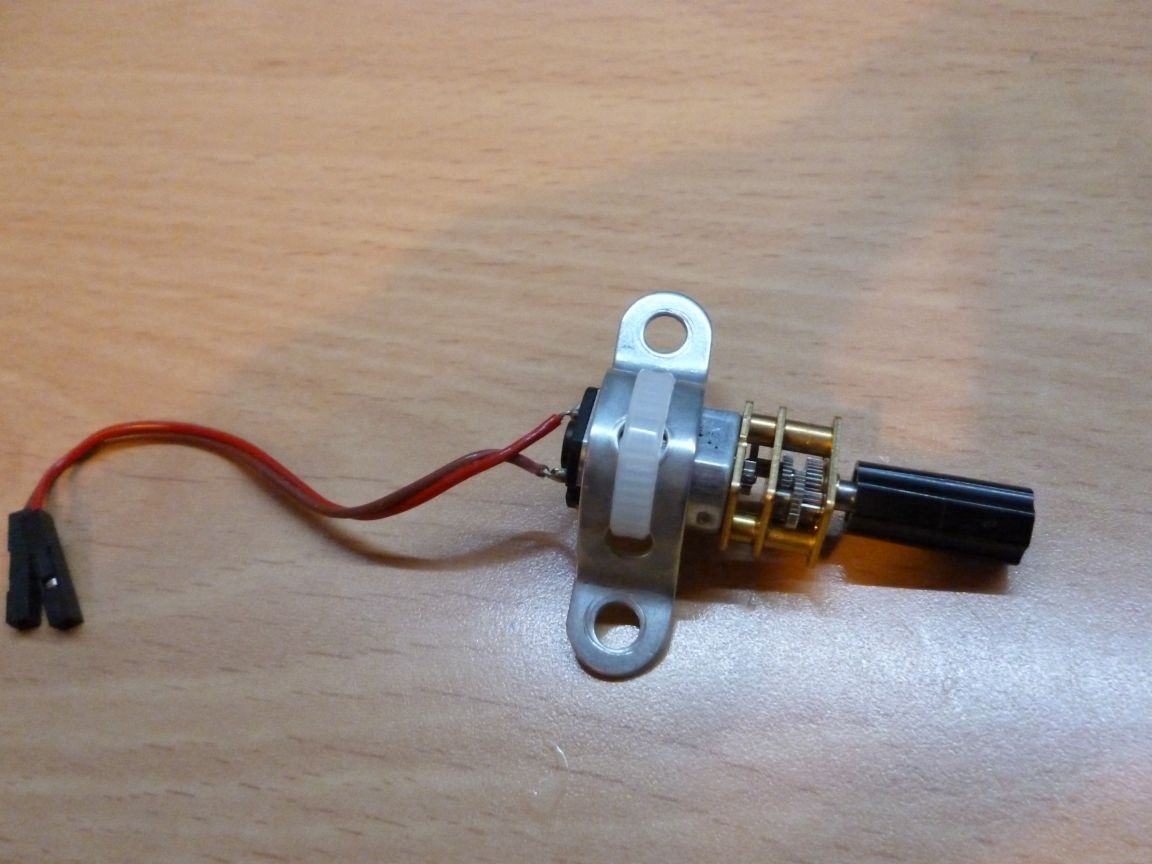
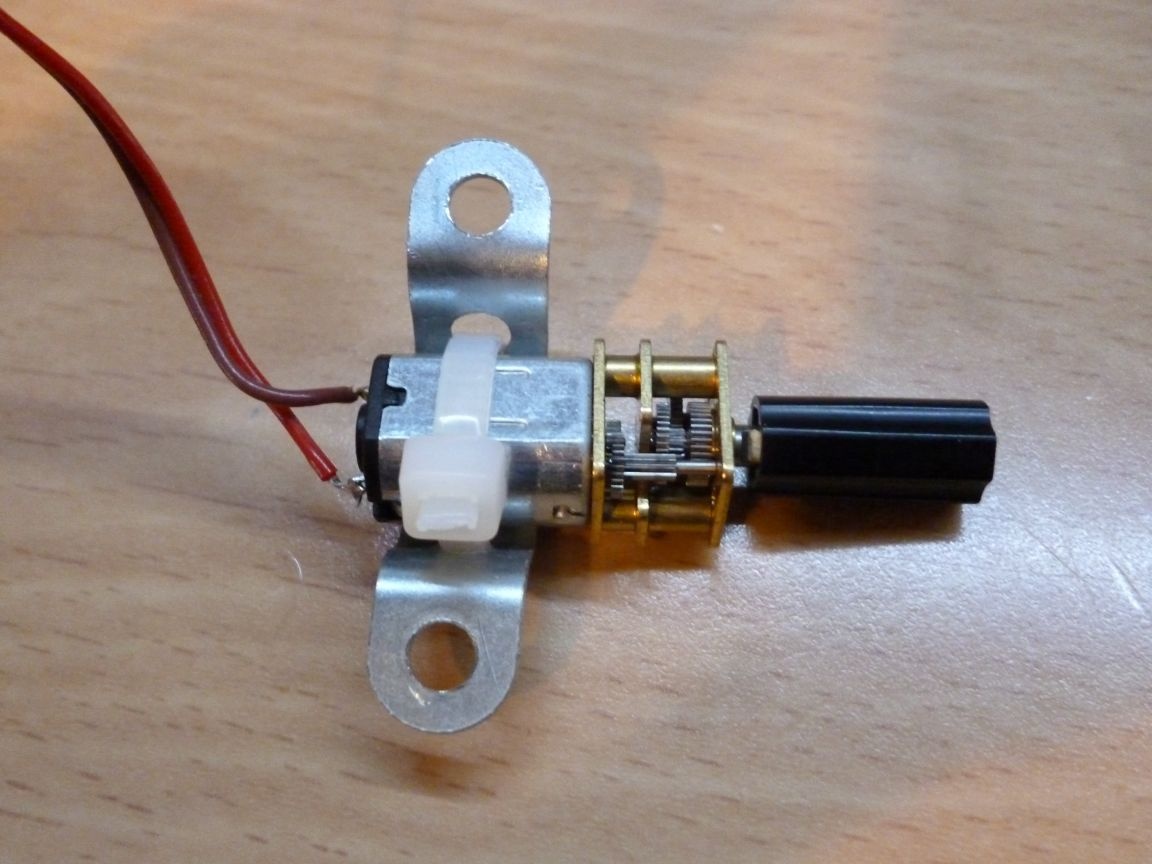
- girmotor
- 2 lysdioder
- 2 motstander 150 ohm
- Kondensator 10v 1000uF
- 2 enkelt rad kammer PLS-40
- 2 PBS-20-kontakter
- Induktor 68mkGn
- 4 NI-Mn 1,2v 1000mA-batterier
- Kobling pappa-mamma to pinner til tråd
- Homutik
- Ledninger i forskjellige farger
- lodde
- Rosin
- loddejern
- Bolter 3x40 og muttere og skiver til dem
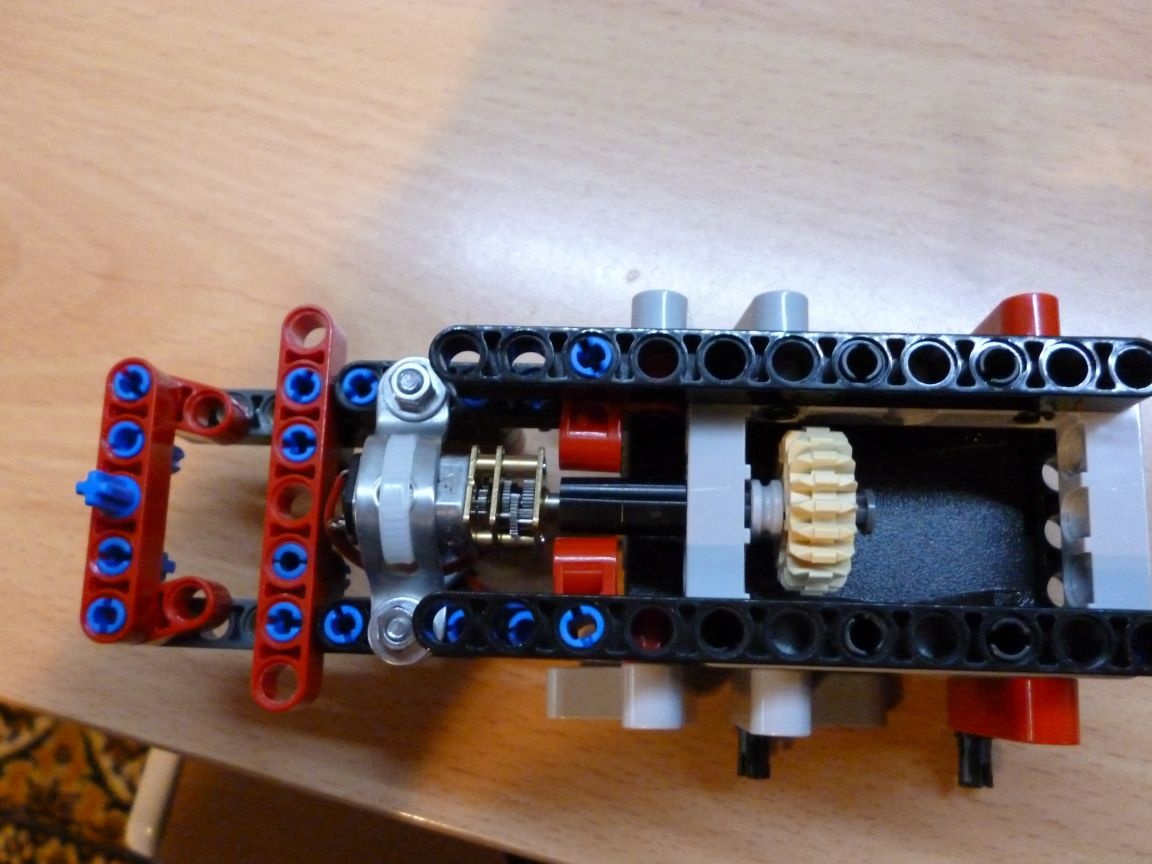
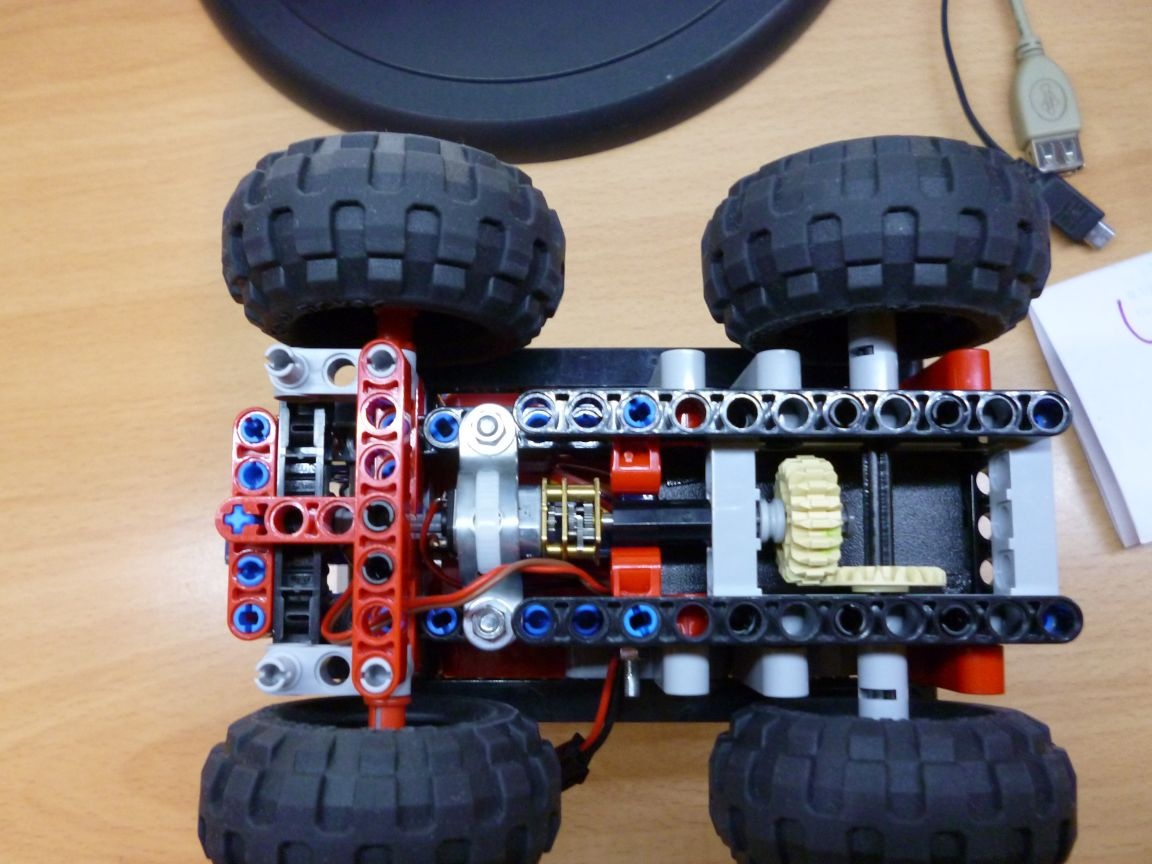
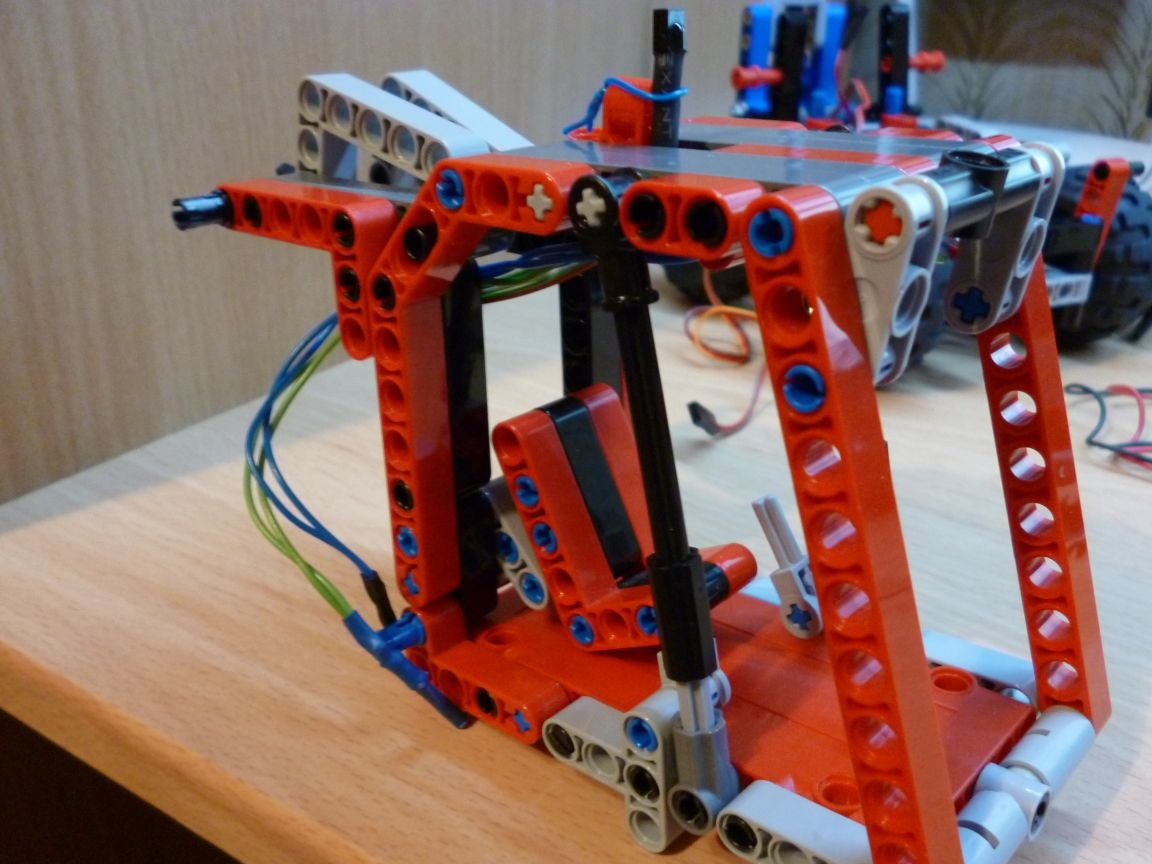
Trinn 1 monter chassiset og drivakselen.
Du kan montere ethvert chassis fra Technic, uansett viste det seg slik.
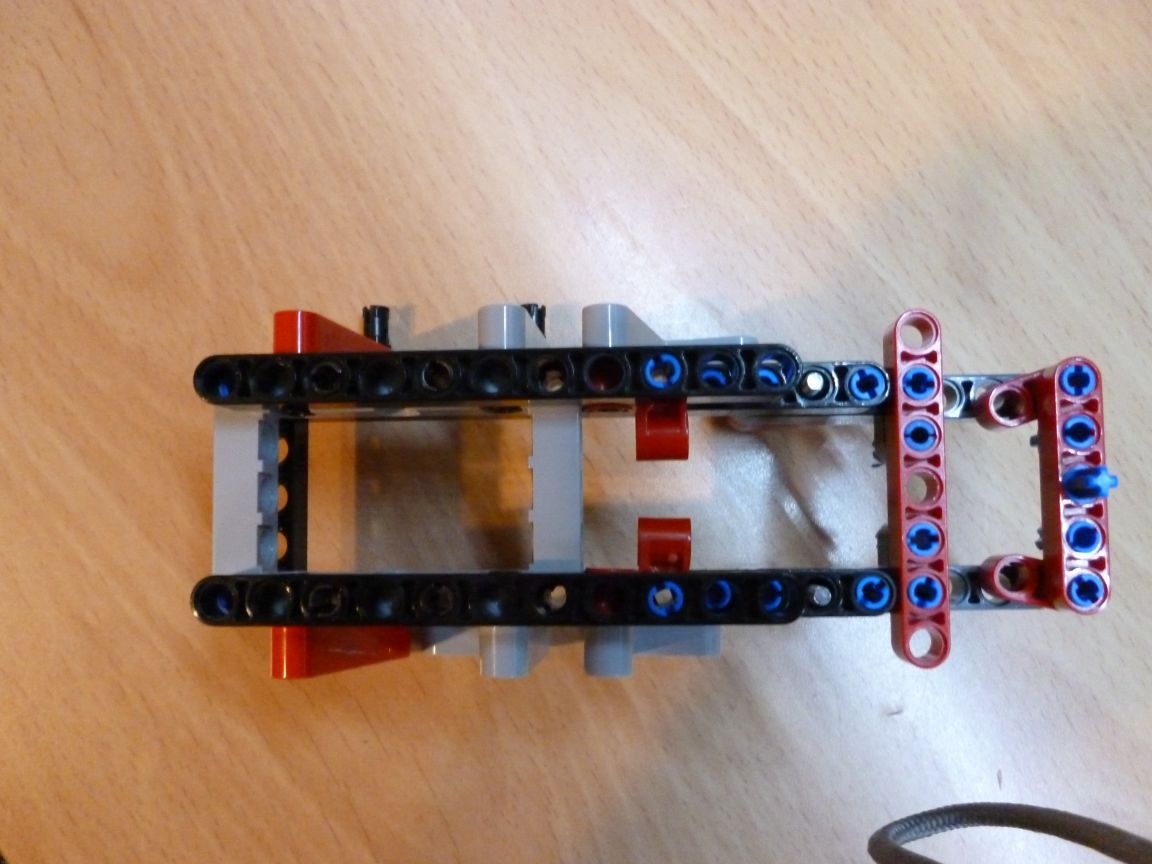
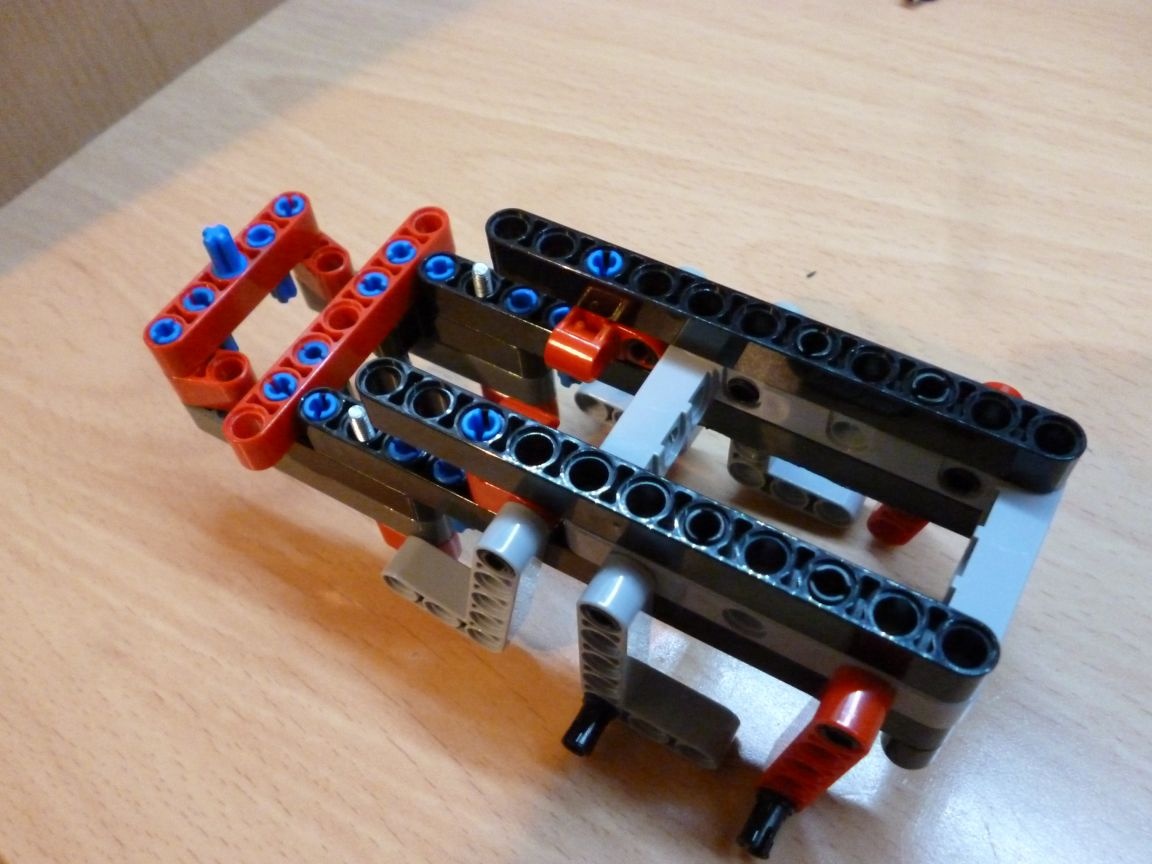
Det er bare problemet å koble girmotoren til designerne. Jeg bestemte meg for dette på følgende måte: satte en tilkoblingshylse på girmotoren og satte inn et skrap av en fyrstikk for fiksering. For montering av girmotoren brukte metallplast fra en jerndesigner og en klemme. Det viste seg følgende:
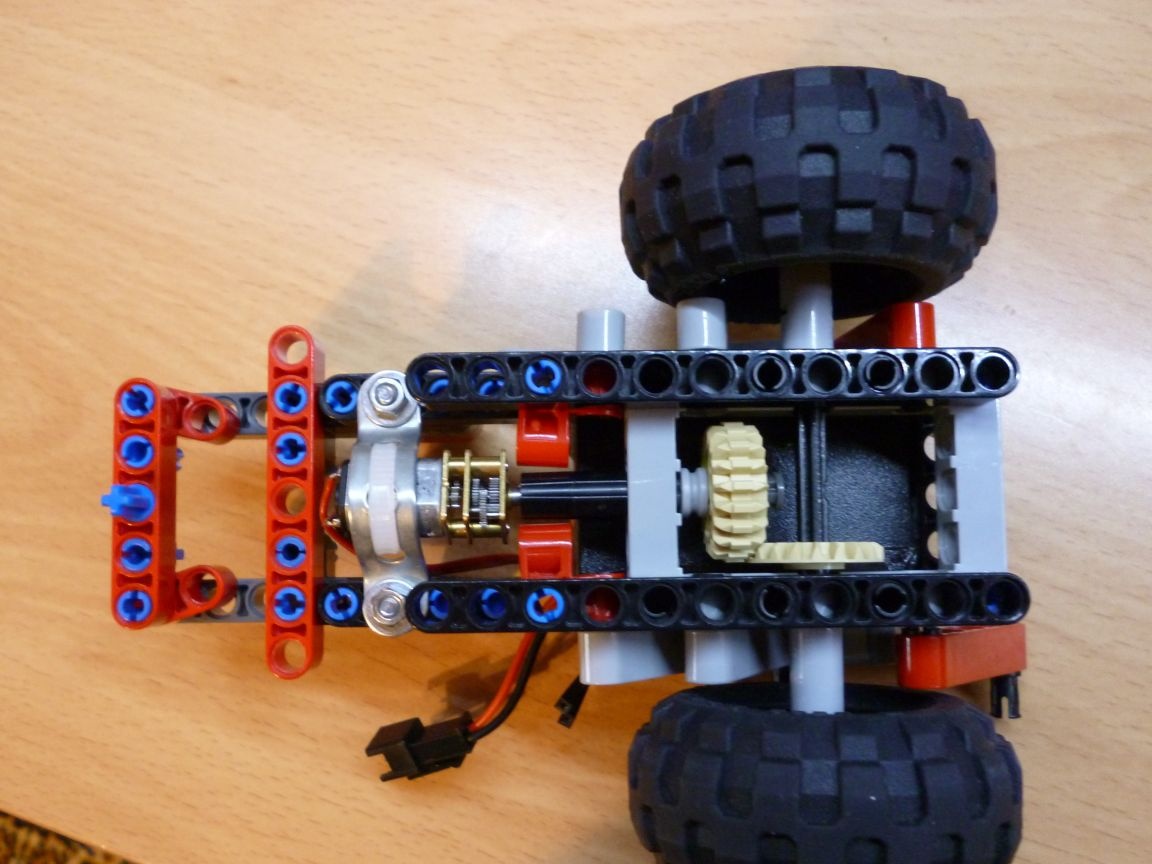
Deretter installerer vi det resulterende designet på chassiset ved hjelp av 3x40 bolter:
Og sett på hjulene:
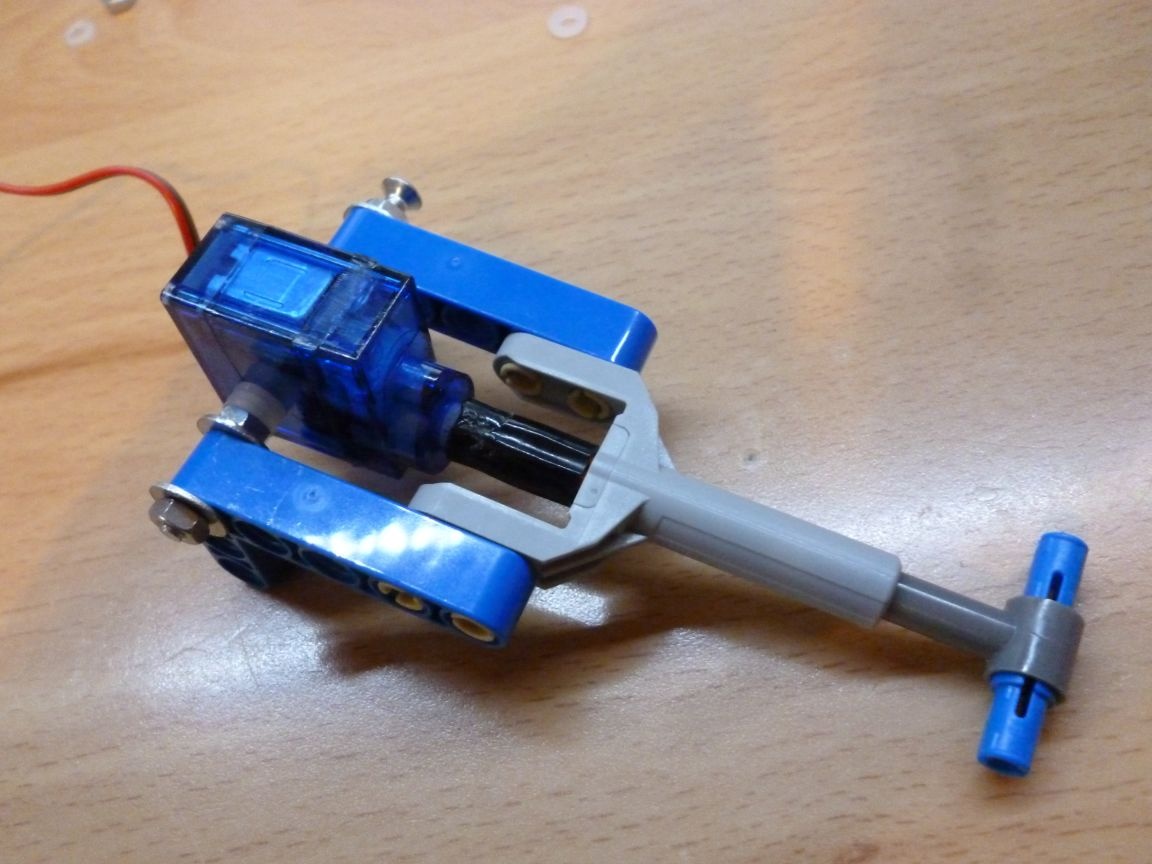
Trinn 2 svingbare hjul
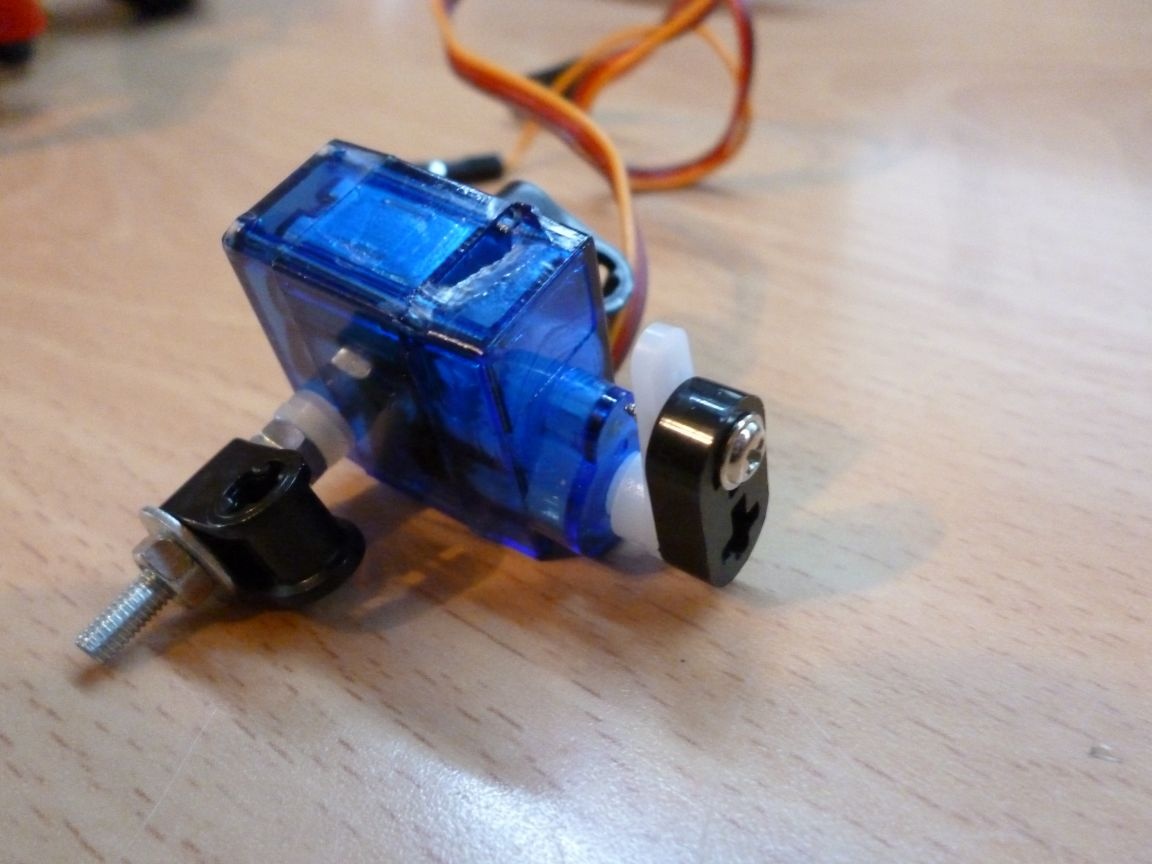
For å utføre rotasjonen tok servo SG-90. Det er nødvendig å bore nøye, for ikke å berøre de indre delene, et gjennomgående hull med en diameter på 3,2 mm eller bare kuttes med en skrivesnor.

Vi setter en bolt inn i hullet og hjørnene langs kantene og fikser med muttere:

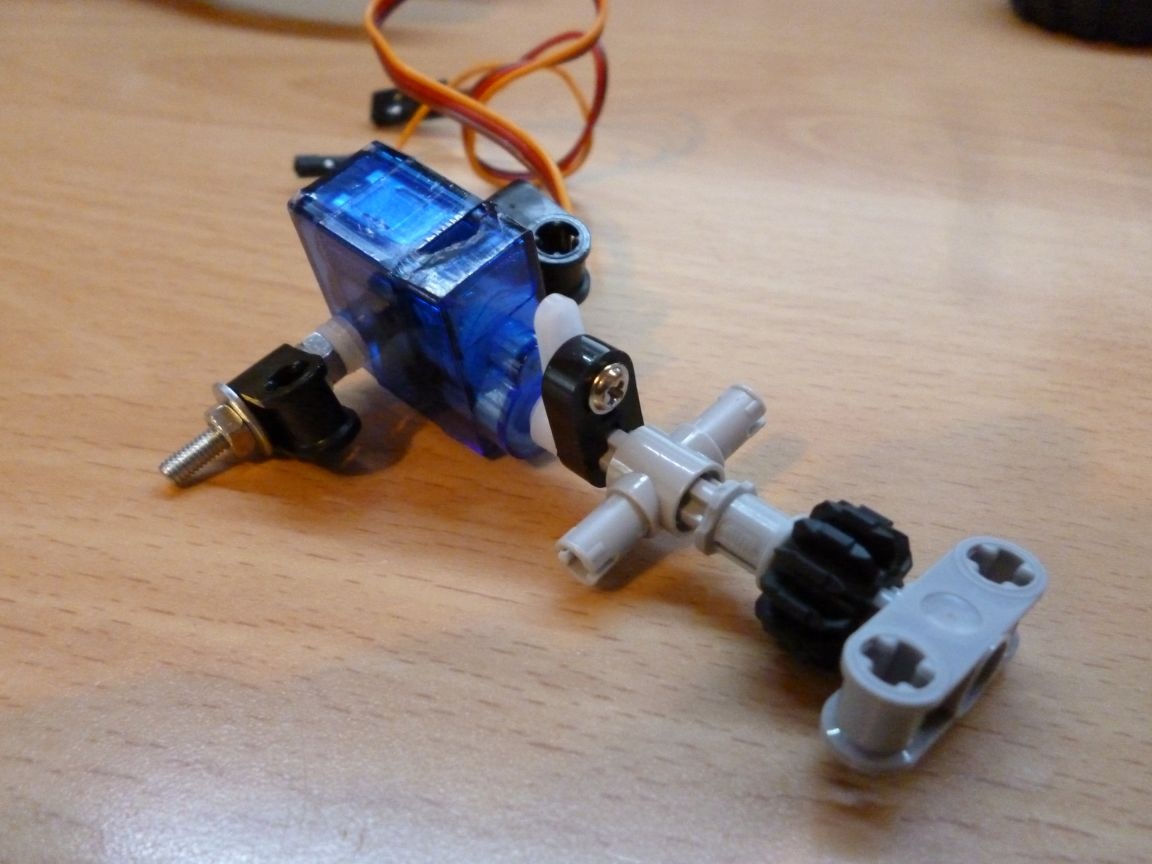
På servo akselen satte vi på en spak med en skrudd del fra lego:
Og til slutt svingarmen:
Vi satte på chassiset:

Sett på hjulene:
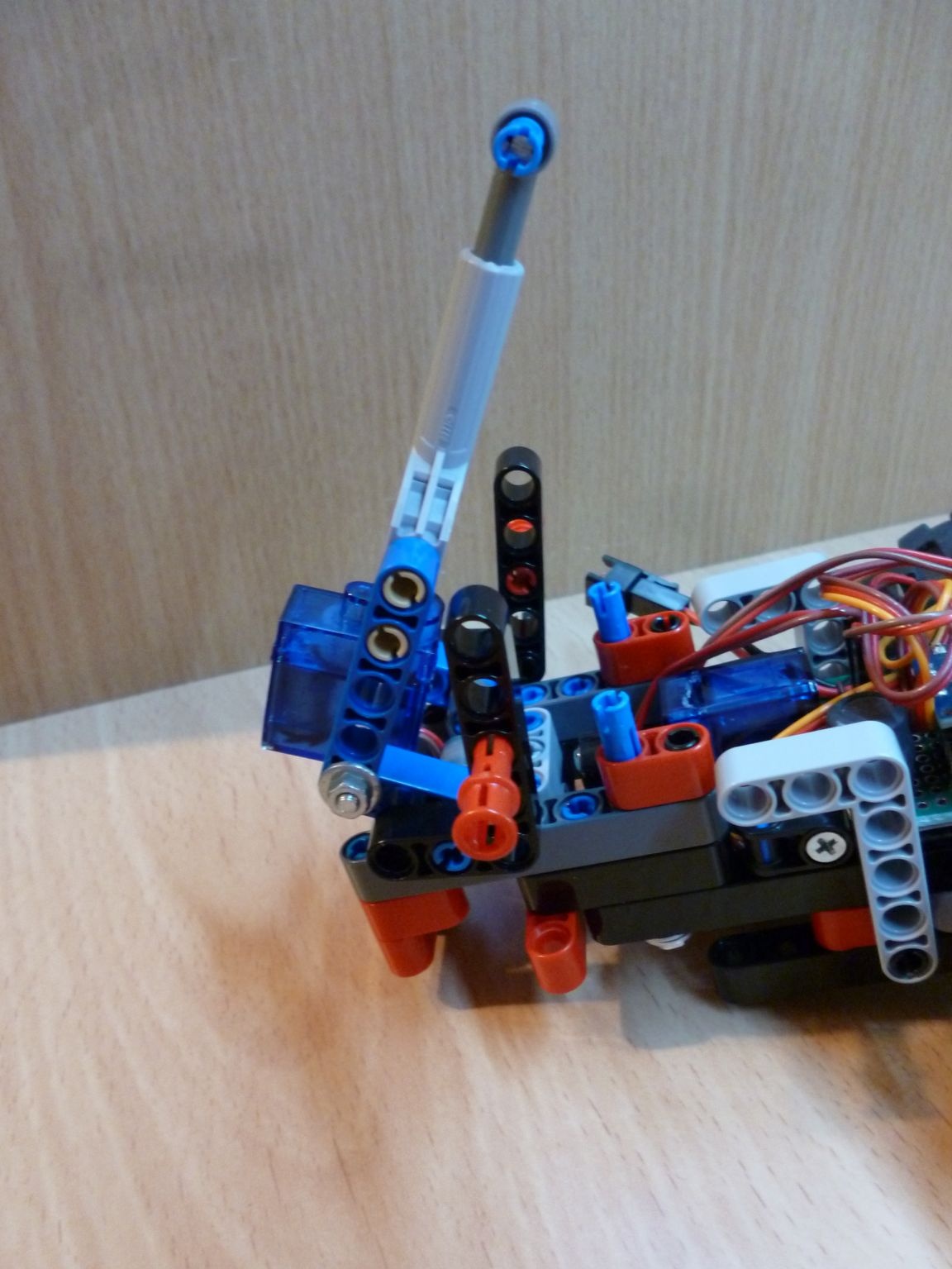
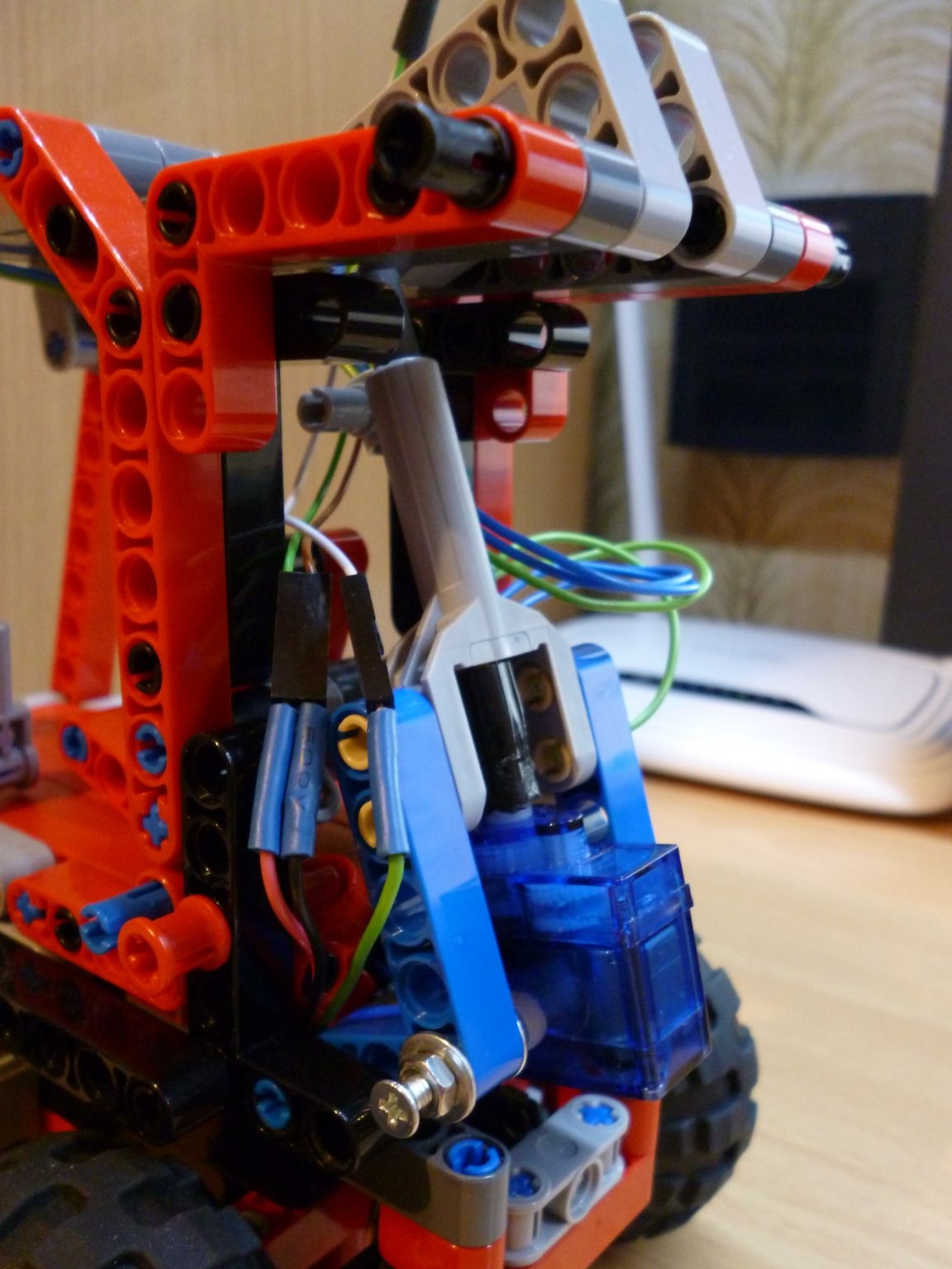
Trinn 3 løfteutstyr.
For å løfte bøtta tok en modifisert servo SG-90. Hele poenget med endringen er å fjerne den interne kontrollen og lodde ledningene direkte til motoren for å få en girmotor ut av servodrevet, det vil si slik at den kan snurre helt. I tillegg til i den første servoen, må du lage et gjennomgående hull for montering:
Installer på chassiset:
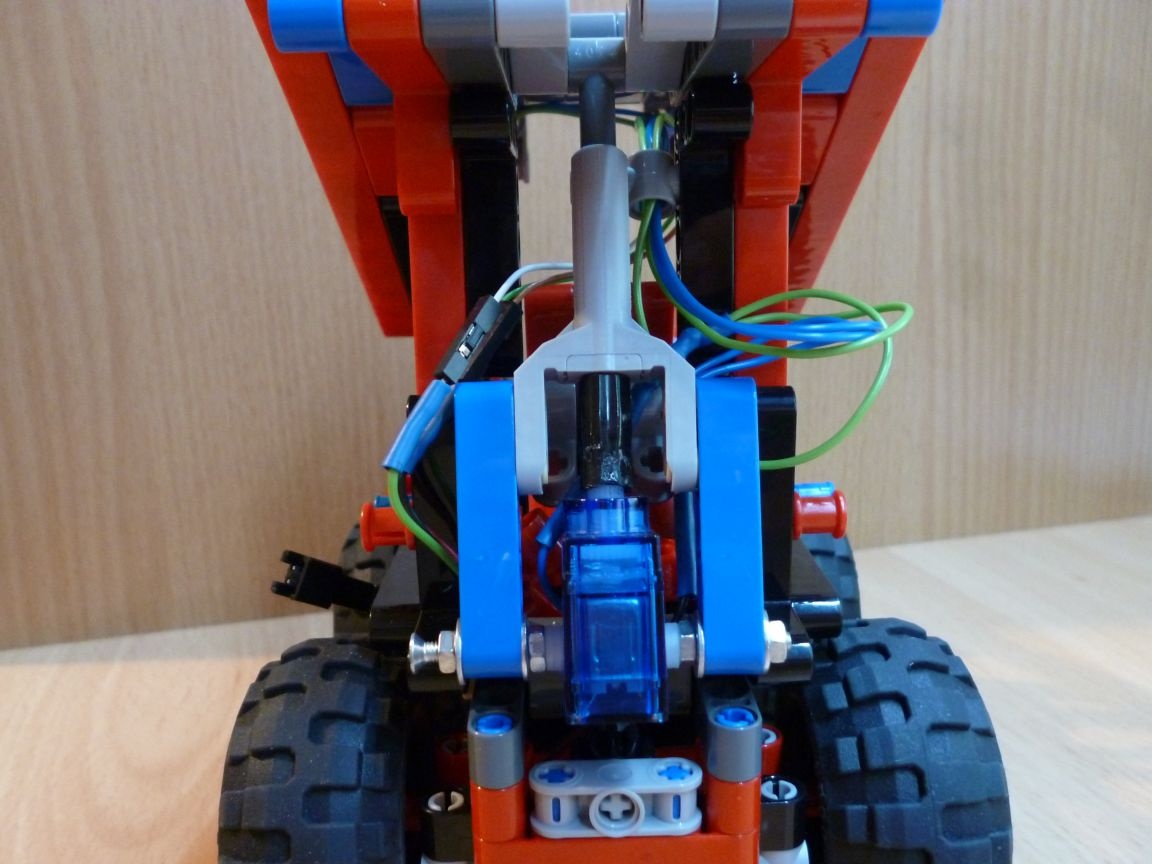
Trinn 4 førerhus.
Det er nødvendig å montere en førerhus fra legoteknikk fra fotografier:

Trinn 5 er en elektriker.
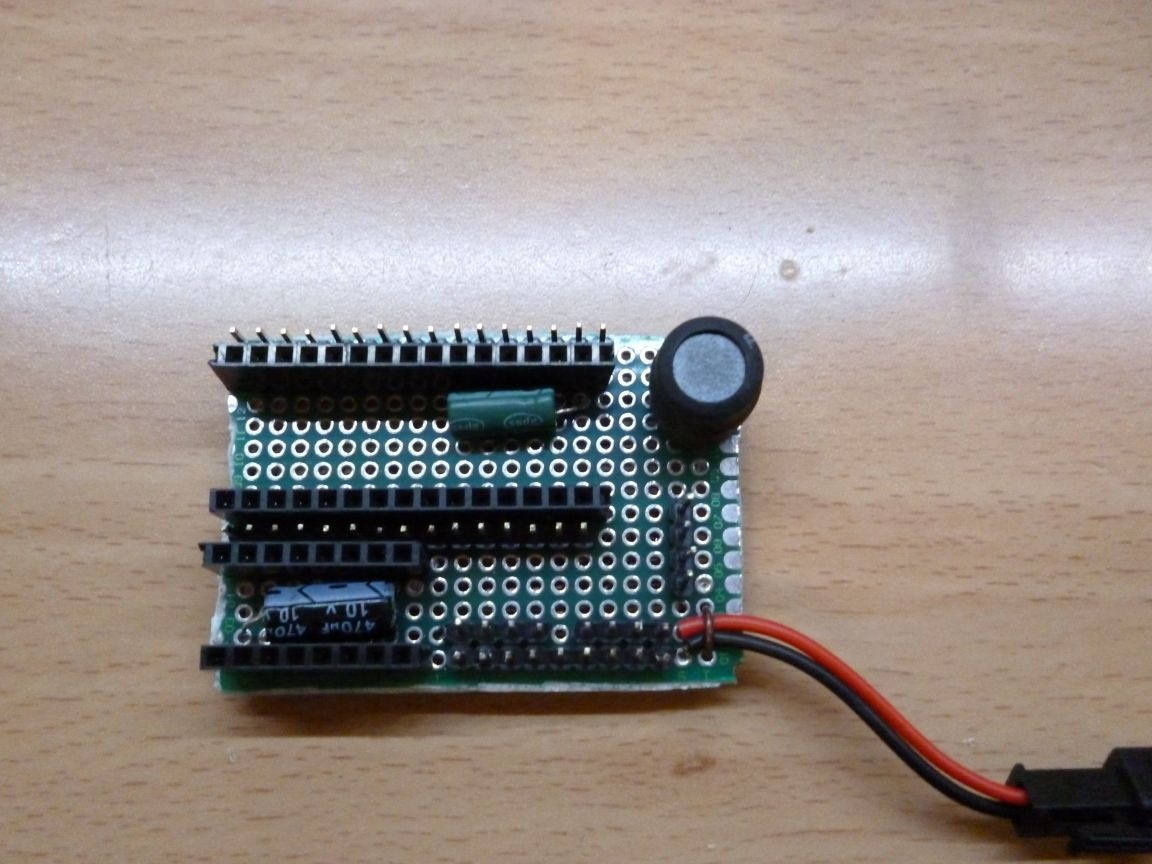
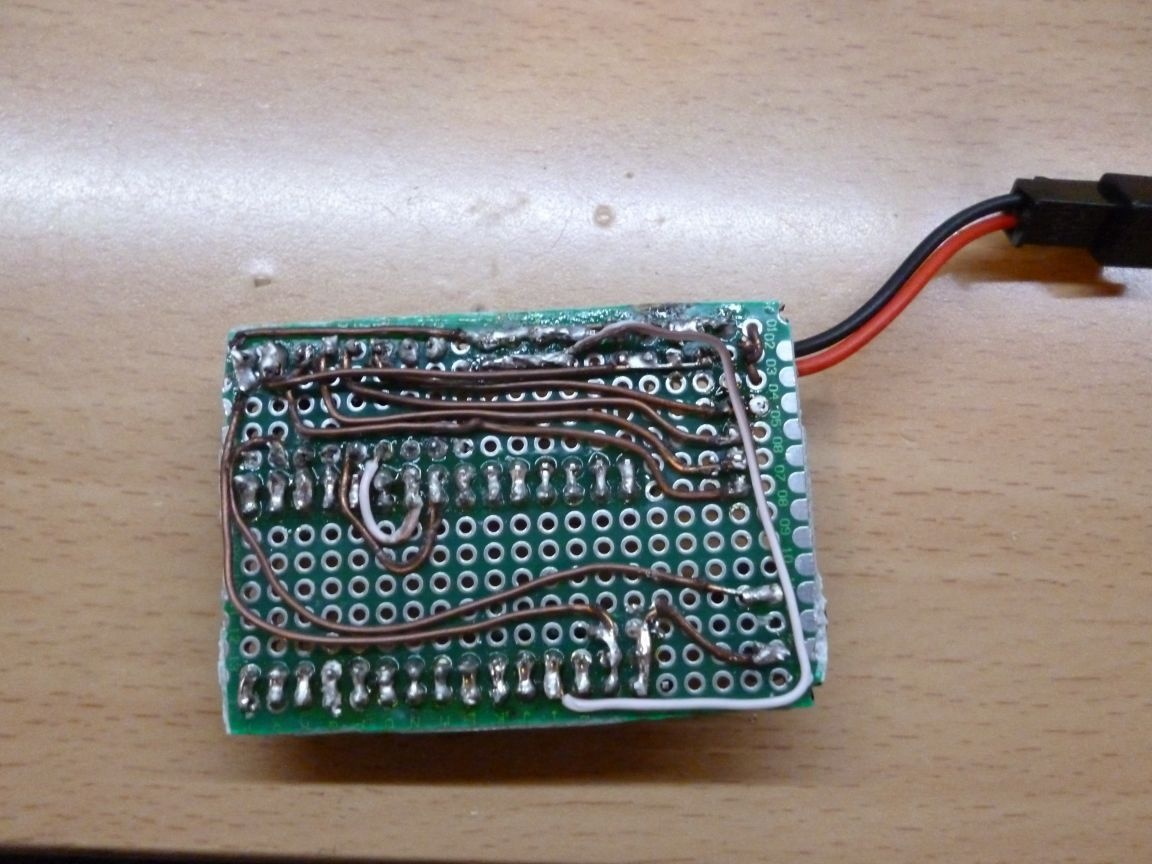
Her må du ta på deg et loddejern. For enkelhets skyld må du lodde alt på kretskortet i henhold til følgende diagram:
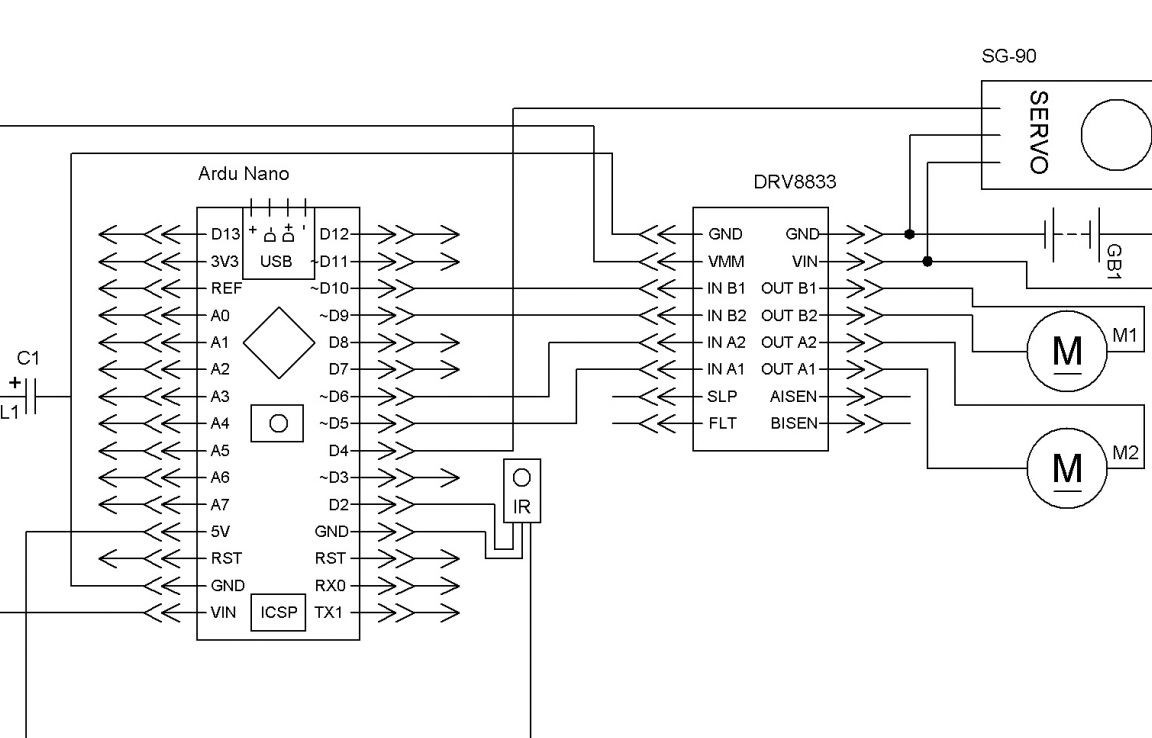
Jeg tror det er verdt å forklare litt: du kan ta hvilken som helst laveffektkondensator, du kan også finne en induktor av noe slag, dette er nødvendig for å stabilisere spenningen til mikrokontrolleren. Motstander må velges for lysdiodene som brukes. Jeg tok en IR-mottaker fra et gammelt leketøy, men du kan kjøpe det i en radiobutikk. Hvis det er sterk interferens, kan du legge til en kondensator til IR-mottakerens strømkrets.
Jeg fikk dette:
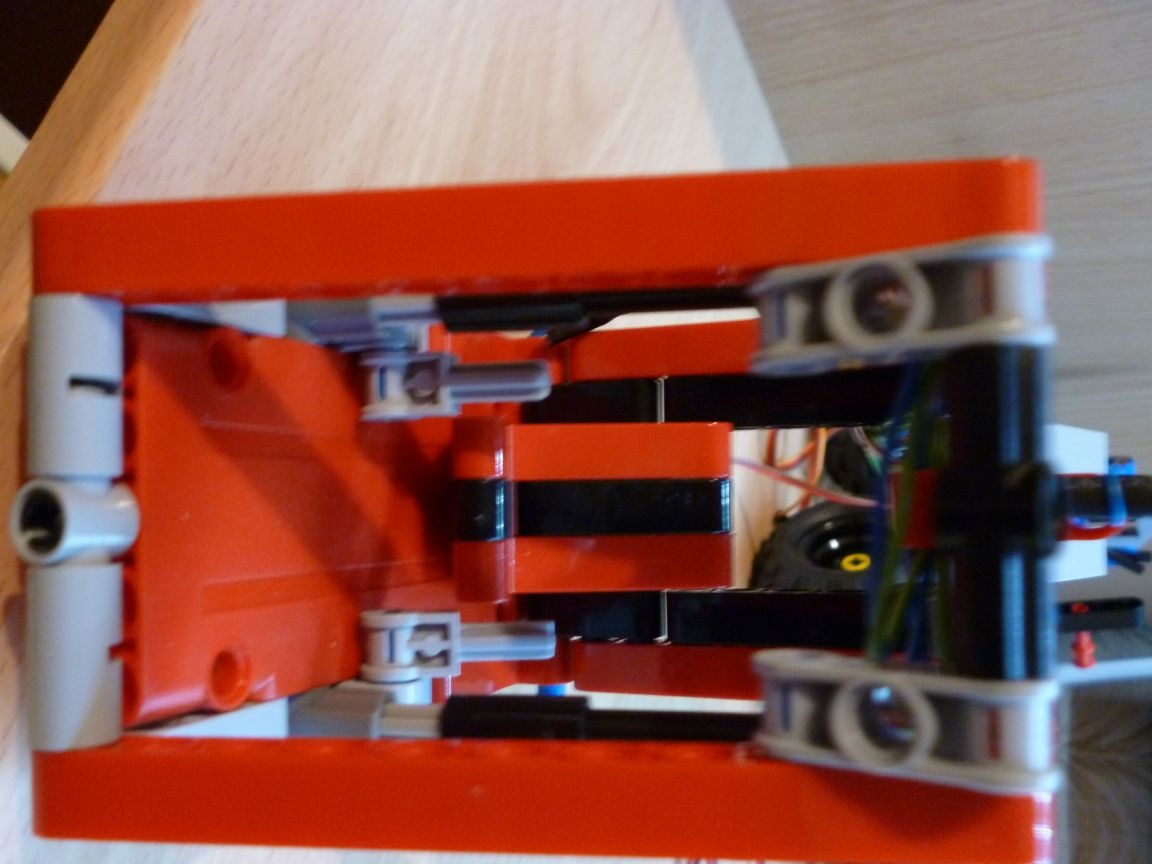
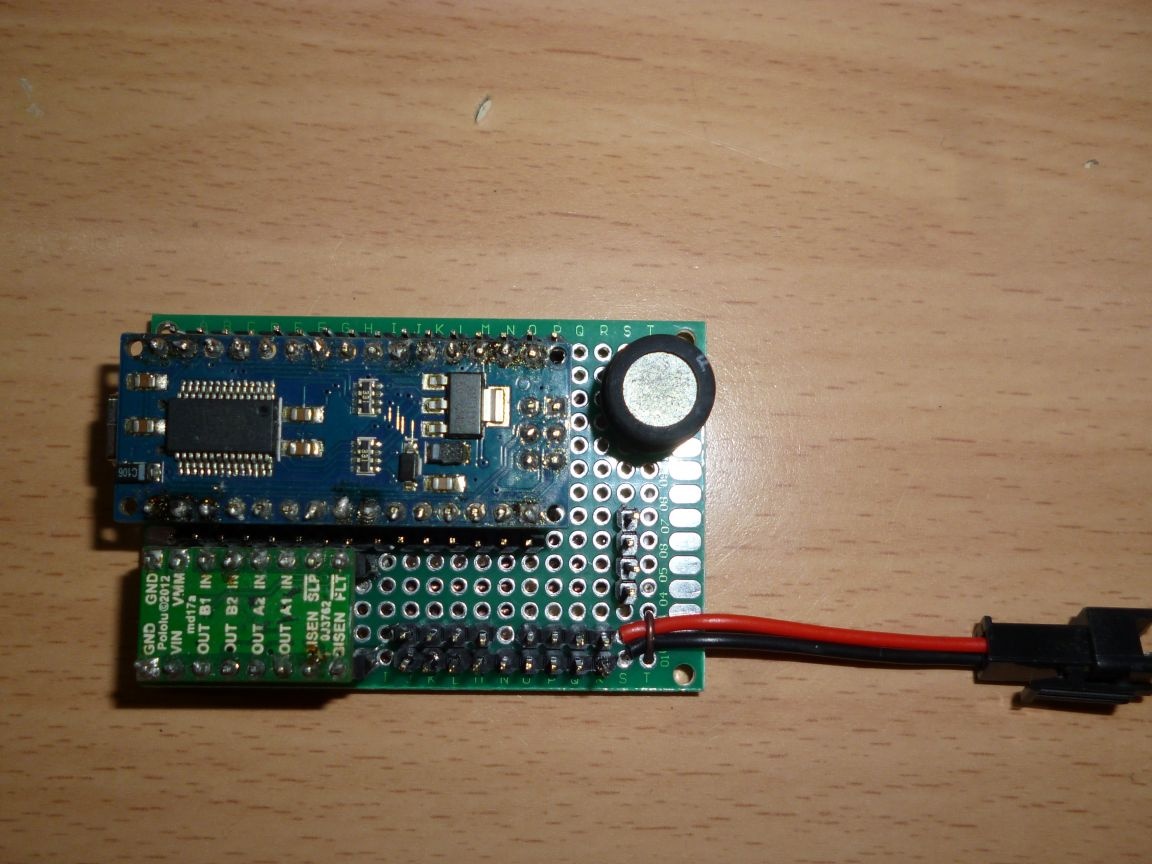
Vi installerer Arduino Nano og DRV 8833 på deres steder:
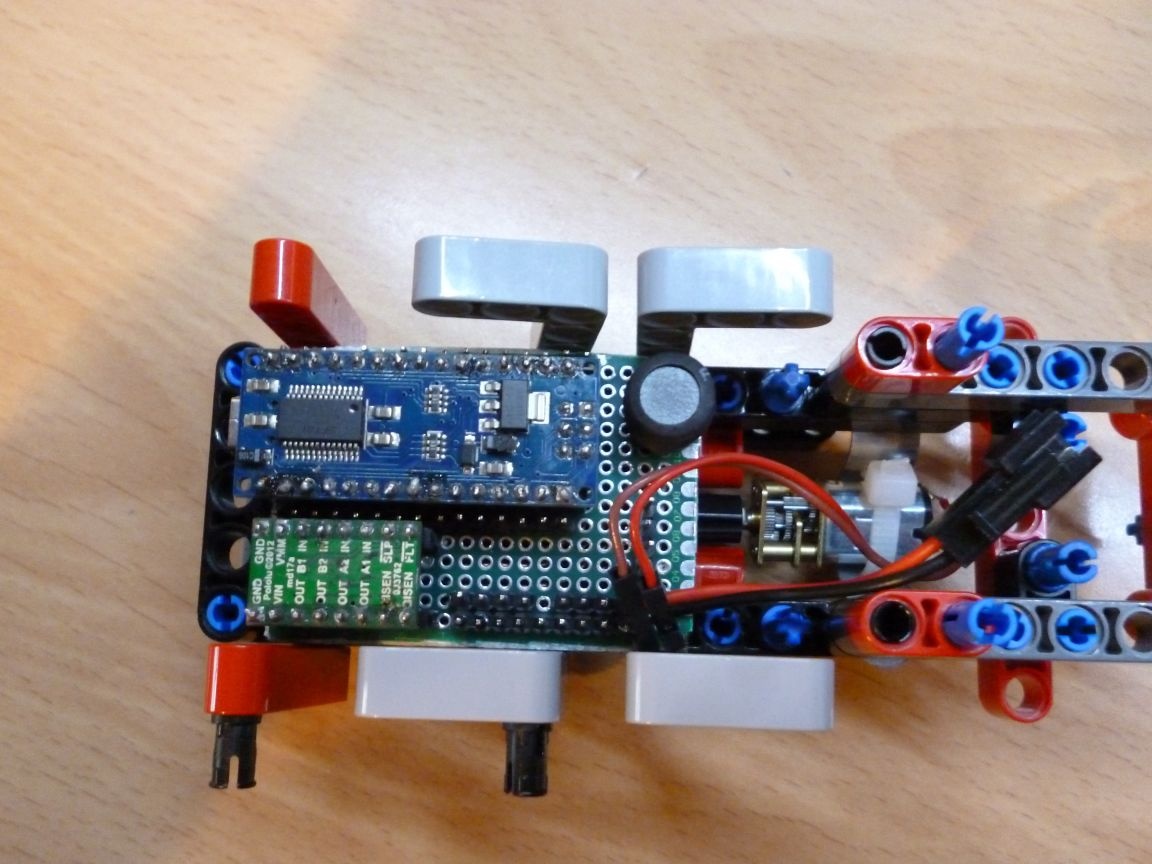
Og nå satte vi brettet på chassiset (fjernet hjulene for enkelhets skyld):
For strøm brukte jeg 4 Ni-Mn 1.2v 1000mA-batterier koblet i serie og viklet med elektrisk tape. Jeg limte dem på dobbeltsidig tape under lokket på bakre førerhus.
Trinn 6 montering av førerhus.
Vi kobler IR-mottaker, motorer og dioder i henhold til diagrammet, setter førerhuset på toppen av chassiset, fikser bøtta (hvilken som helst bøtte kan lages):

Trinn 7 firmware.
Jeg programmerer i en Arduino IDE. Først må du fylle ut firmwaren min og gjennom terminalen se på fjernkontrollkodene du skal bruke. Du kan ta hvilken som helst IR-fjernkontroll, for eksempel fra en TV- eller DVD-spiller. Ved å klikke på en knapp i terminalen vil vi se koden til den trykte knappen, skrive den ned på et stykke papir. Vi gjør dette med alle knappene vi vil programmere handlingene til lasteren. Deretter rediger du skissen. Vi skriver ned kodene vi registrerte for de nødvendige handlingene, og blinker den igjen.
innsetting
Laster video: