
God dag til alle kjære venner! I dagens artikkel vil jeg vise deg en ganske interessant idé hjemmelaget, som kan gjøres av nesten alle som har gjort i det minste litt håndverk og hvem vet litt om Arduino.
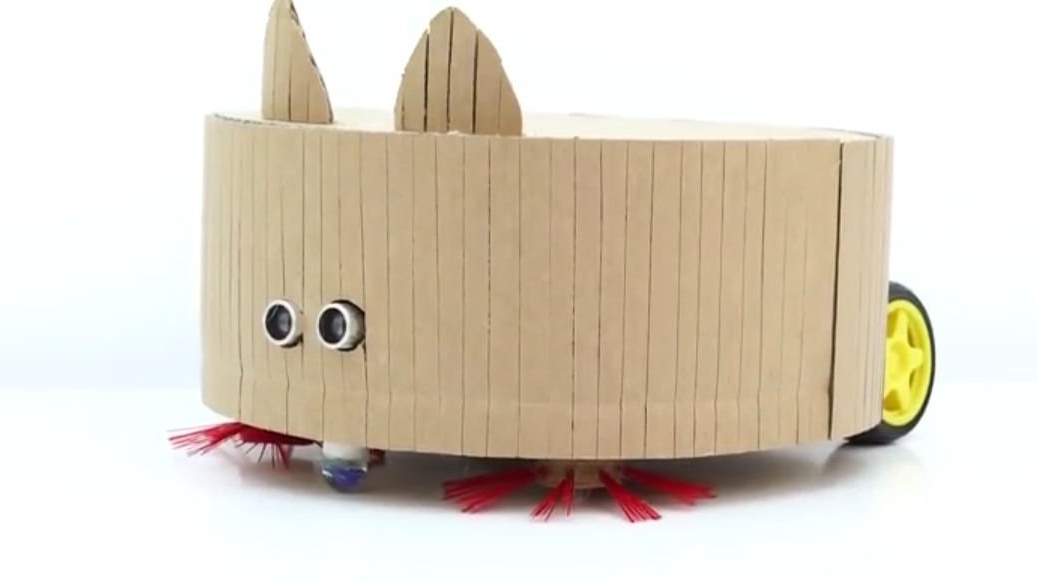
Generelt sett vil vi i dag gjøre enkle roboter pappstøvsuger gjør det selv. Men du forteller meg, for jeg har allerede fortalt deg hvordan du lager en robotrenser selv, og du vil ha rett, men denne robotstøvsugeren er mye enklere, billigere og mer praktisk enn den forrige. Ja, og dette modellen endret og ser bedre ut, og har også full automatisering ombord. dette ulike jobb, vil ikke bare bidra til å passere tiden, men vil også bli en uunnværlig assistent i ditt hjem eller verksted. Kort sagt er tingen nyttig og ikke komplisert.
Vel, nok av det lange forordet, la oss gå!
Og så, for dette hjemmelagde produktet vi trenger:
bølgepapp (mye papp)
-
kobler ledninger
-
-
-Hjul for girmotorer
-driver av drivere for Arduino (forfatteren av det hjemmelagde produktet bruker en modelldriver, som du bare trenger å sette inn i arduino for å koble til, men du kan bruke en driver som er praktisk for deg, det viktigste er at spenningen samsvarer med girmotorene)
-
-plastflaskehetter
- bust fra en kost
-motor med turbinvifte, i prinsippet kan du gjøre det selv
plastnett
- liten beholder
eske for to 18650 batterier
-
Av verktøyene vil vi også trenge:
loddejern
limpistol
kontorkniv
-lineyka
- blyanter eller markører
Det første trinnet er å ta et stort ark papp, en linjal og et kompass. Vi måler 13 cm med et kompass og tegner en sirkel på papp, hvoretter vi klipper den ut, totalt trenger vi to slike sirkler:


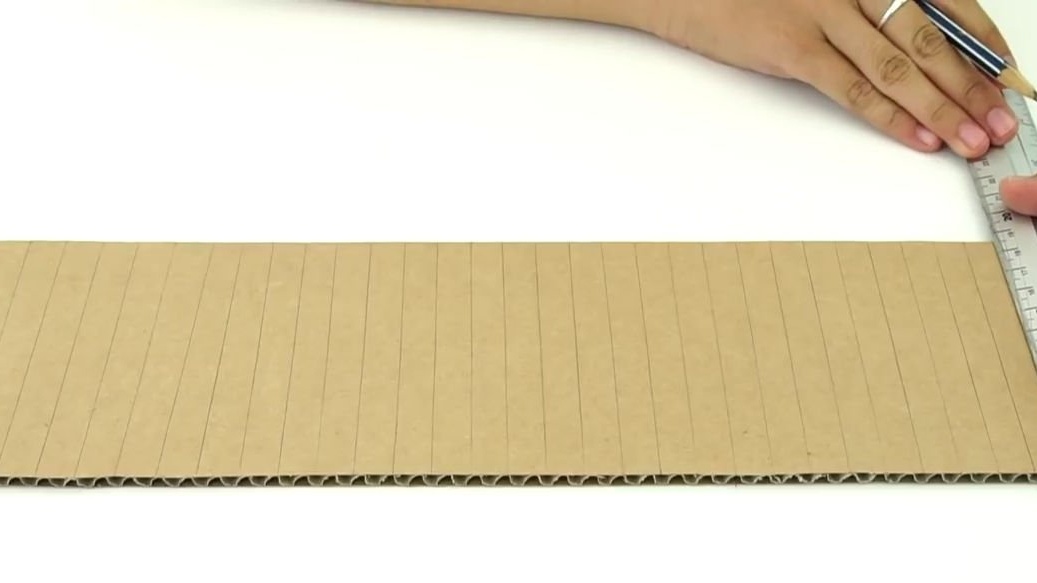
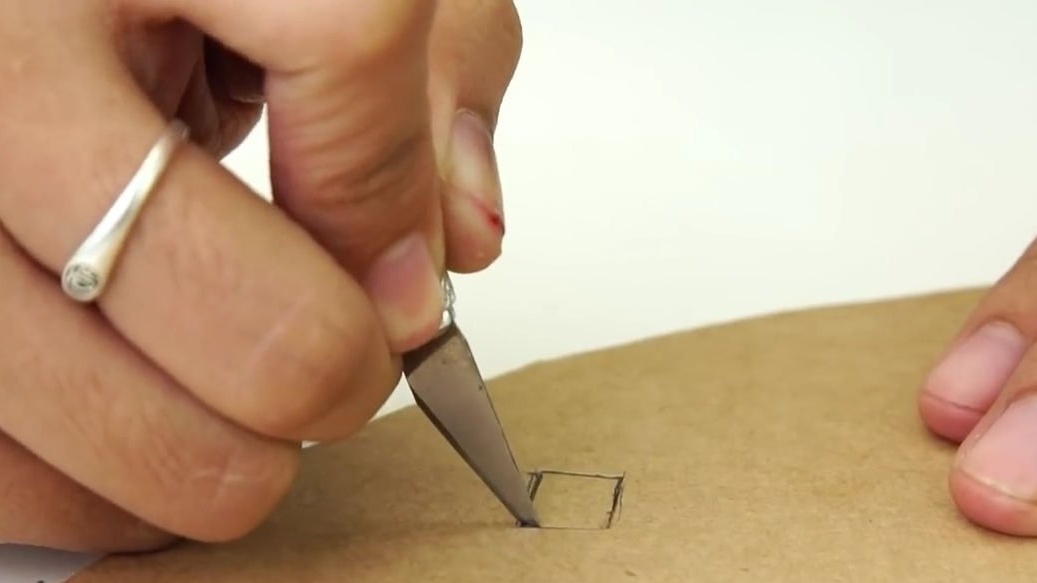
Så kuttet vi ut et rektangel av liten størrelse fra samme papp. Vi tar en linjal og en blyant, med en blyant tegner vi en papp med et intervall på ca 1 cm. Etter denne prosedyren tar vi en geistlig kniv og lager små kutt av det øverste laget av papp, uten å berøre bunnen. Dette er nødvendig slik at papp blir mer elastisk:



Vi vri det tidlige arbeidsstykket som er laget rundt en av pappkretsene, og selvfølgelig limer vi det med varmt lim:

La oss ta tak i elektronikk og den mekaniske delen.
For å komme i gang, ta girmotoren og sett et hjul på den, vi gjør det samme med den andre motoren:

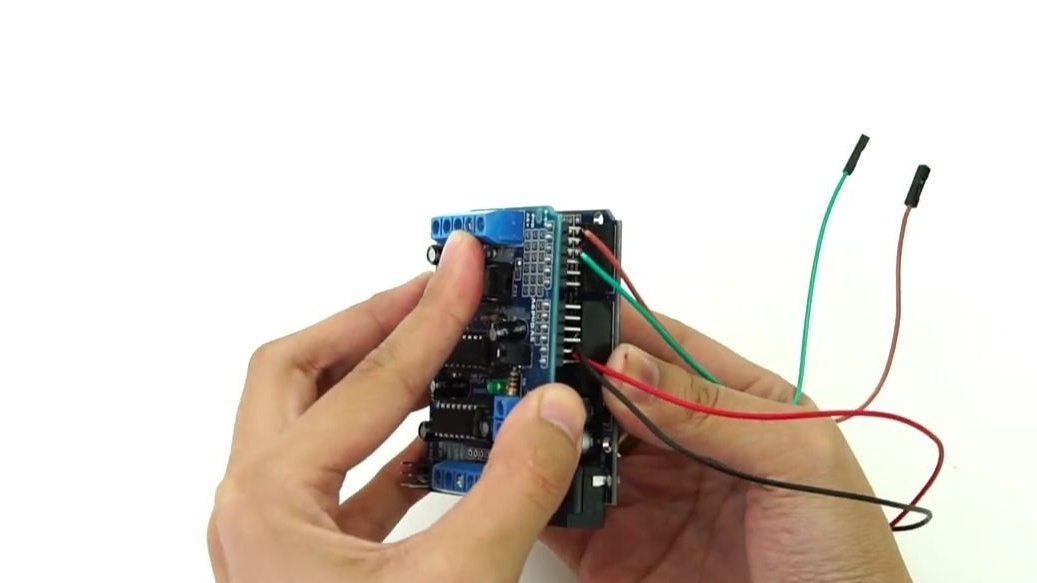
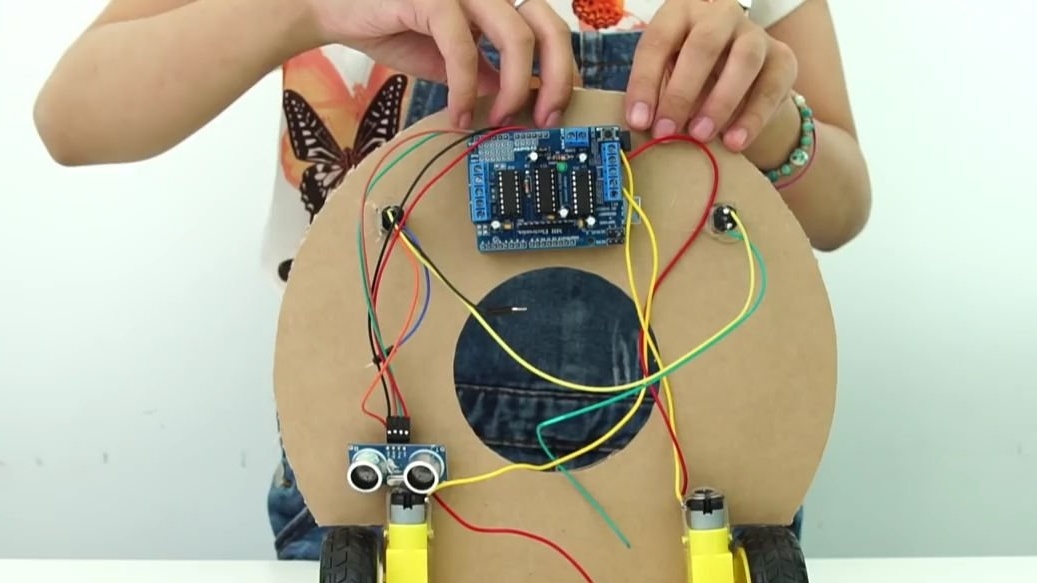
Så tar vi Arduino Uno-brettet og tilkoblingsledninger, som igjen må kobles til visse pinner (kontakter) på brettet. For enkelhets skyld tar vi forskjellige farger: vi kobler rødt til 5 volt, svart til GND, og de to andre til to forskjellige pinnene. Hvilke pinner du skal koble ledningene til, må du umiddelbart finne ut på bakgrunn av koden, eller skrive pinnene som ledningene dine er koblet til. Generelt er det ikke noe komplisert her, vi kobler sammen:

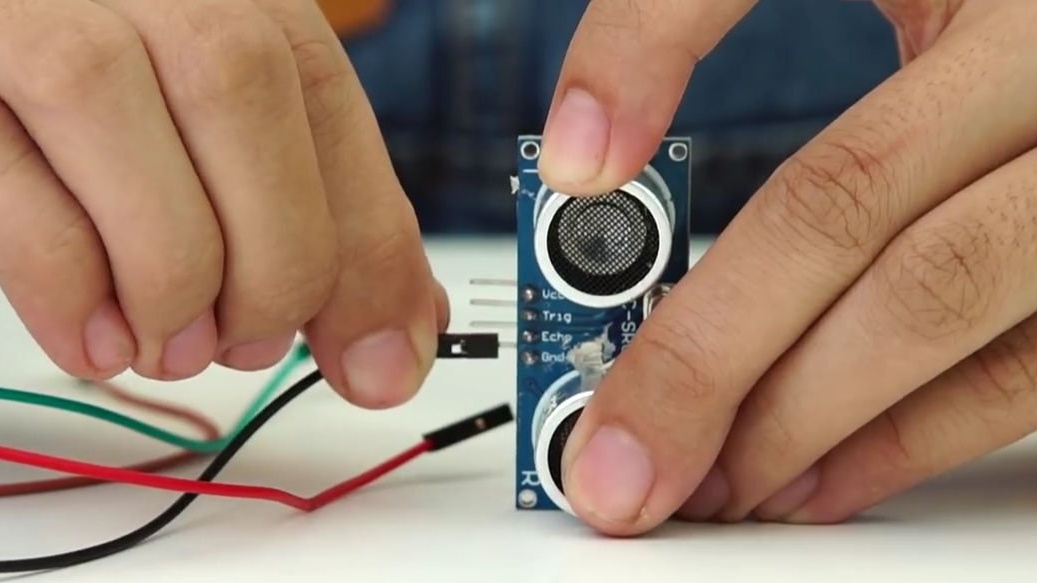
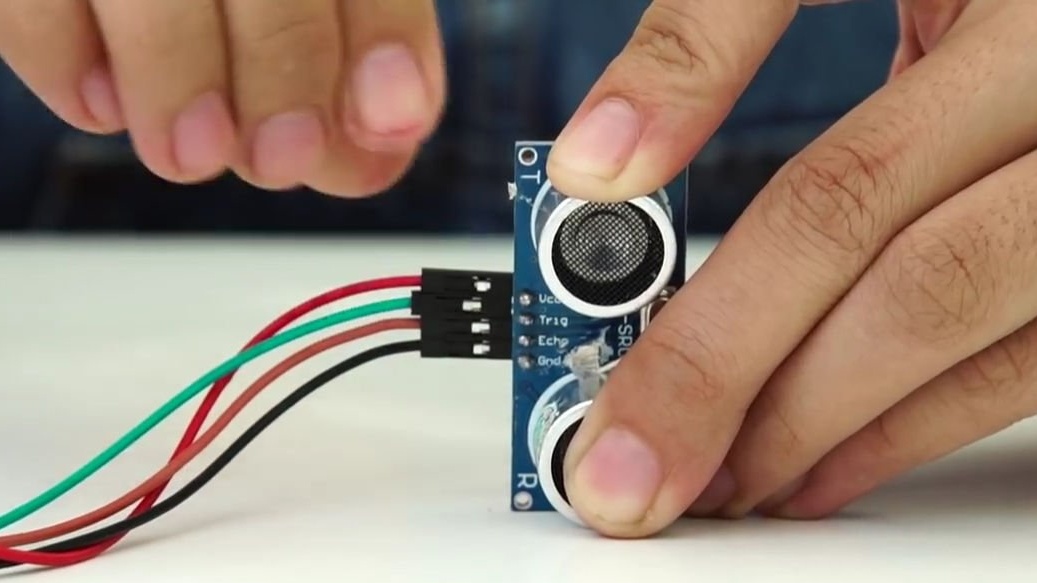
Vi kobler den motsatte siden av ledningene til ultralydområdet, som vist på bildet nedenfor, hvis det ikke er klart, kan du se forfatterens video.
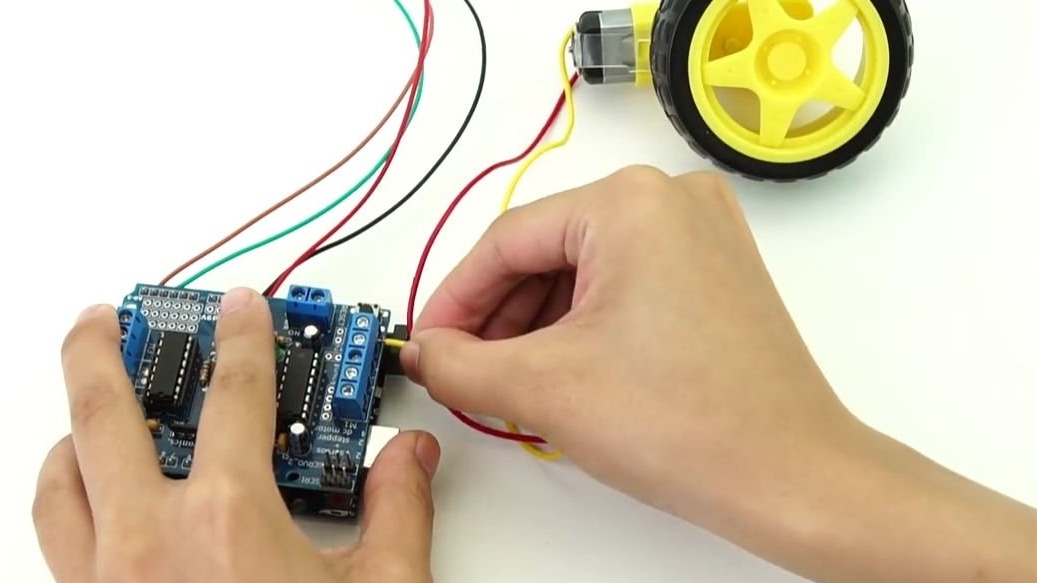
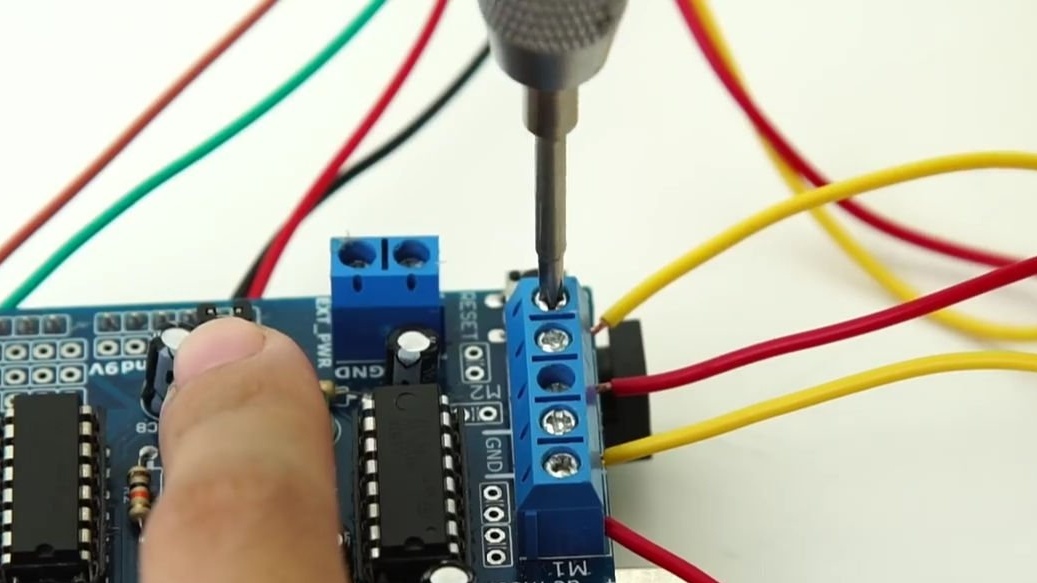
Vi kobler girmotorene til motordriveren, du trenger ikke engang å lodde noe, bare sett det inn i klemmene og det er det:

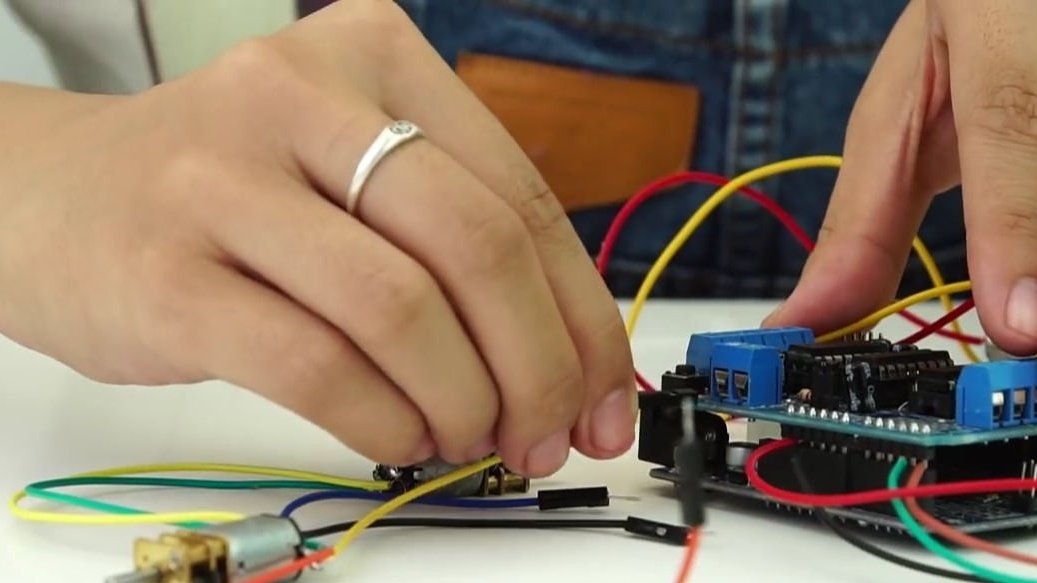
Det er nødvendig å lodde tilkoblingsledningene til minimotorene, ved hjelp av hvilke, vil vi koble disse samme motorene til motordriveren. Generelt kobler vi til:
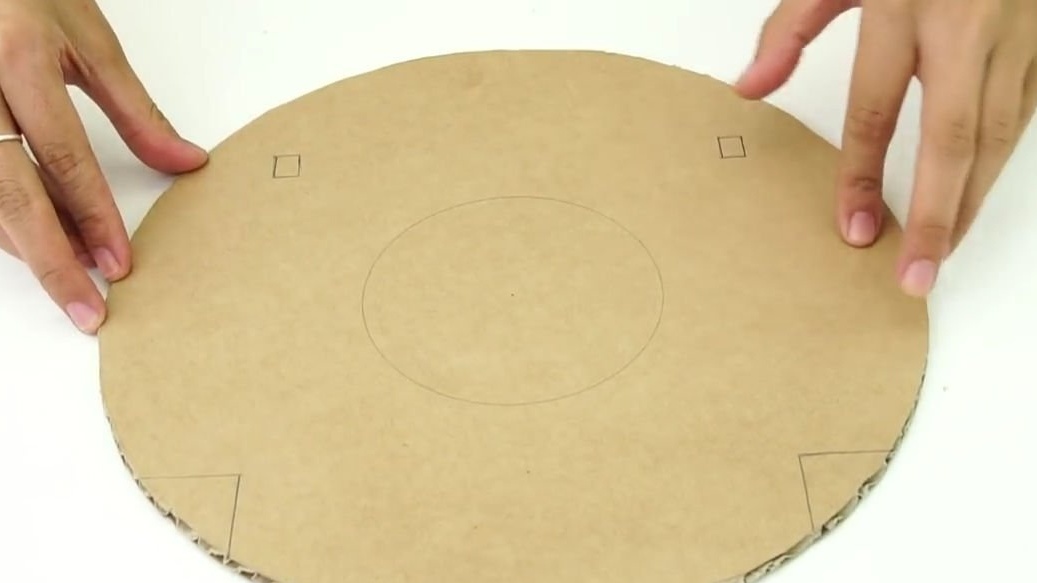
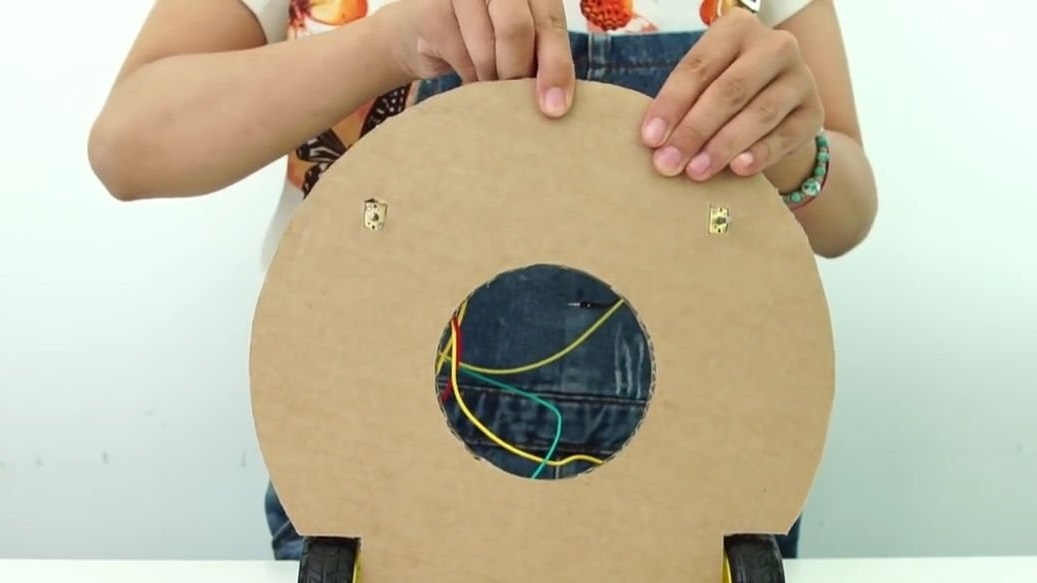
Nå tar vi den gjenværende pappsirkelen, som ble laget helt i begynnelsen. På den må du tegne en ny sirkel i midten og flere rektangler. Du kan se all markeringen på bildet nedenfor. Så kuttet vi ut de merkede hullene, det skulle vise seg på samme måte som på bildet nedenfor:

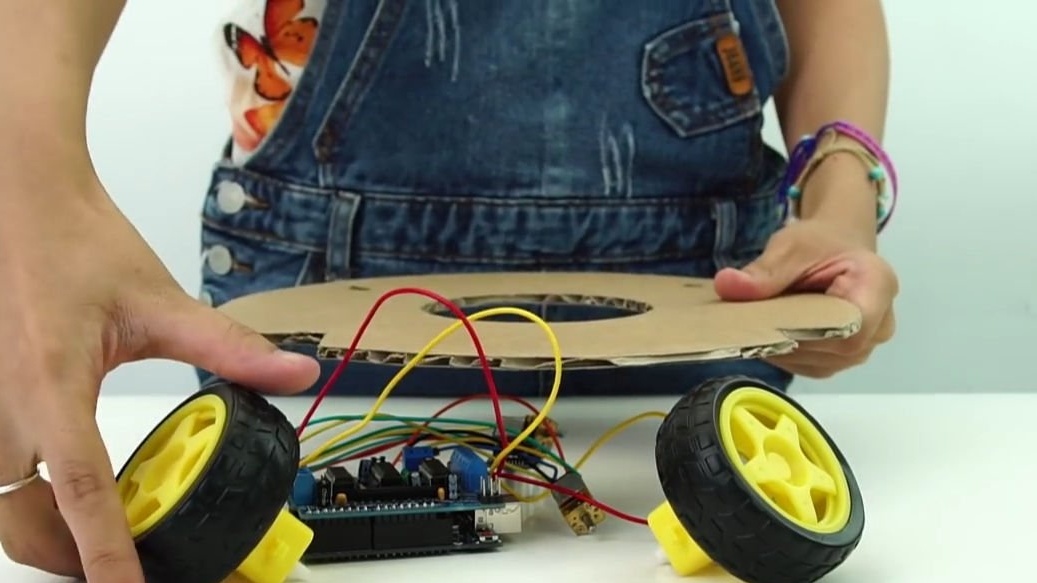
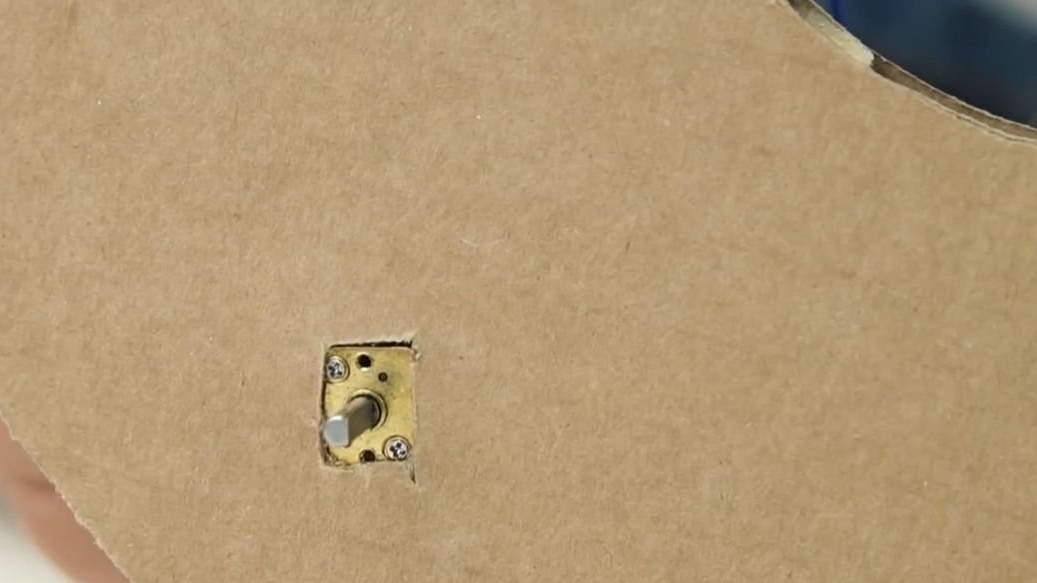
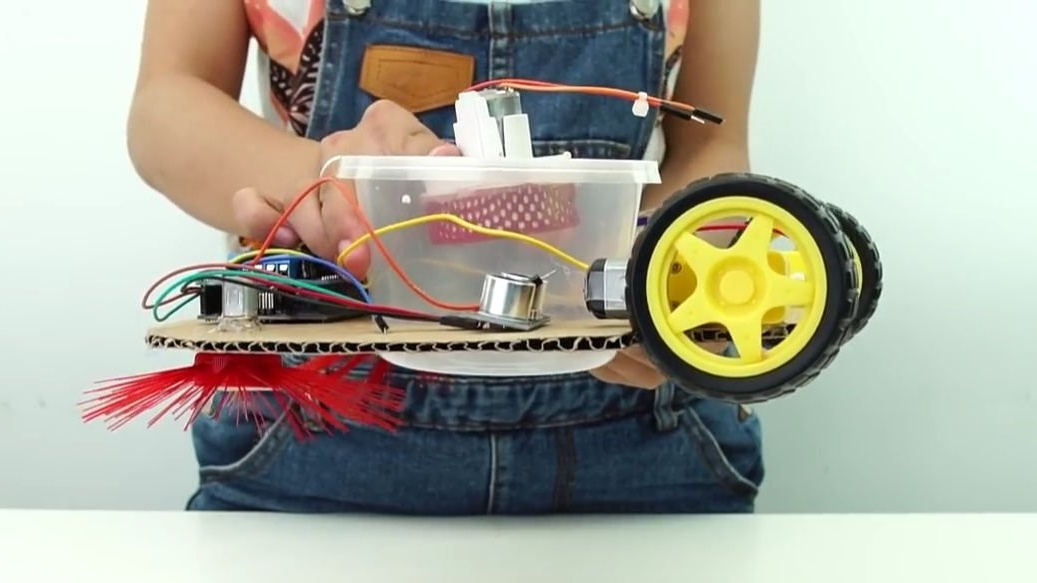
Ta helheten elektronikk og legg den på en tidligere laget pappsirkel. Vi setter inn små motorer i de rissede rektangulære hullene, og fest resten av elektronikken til smeltlim, fester store girmotorer parallelt med baksiden, og berører ikke ultralydsområden:

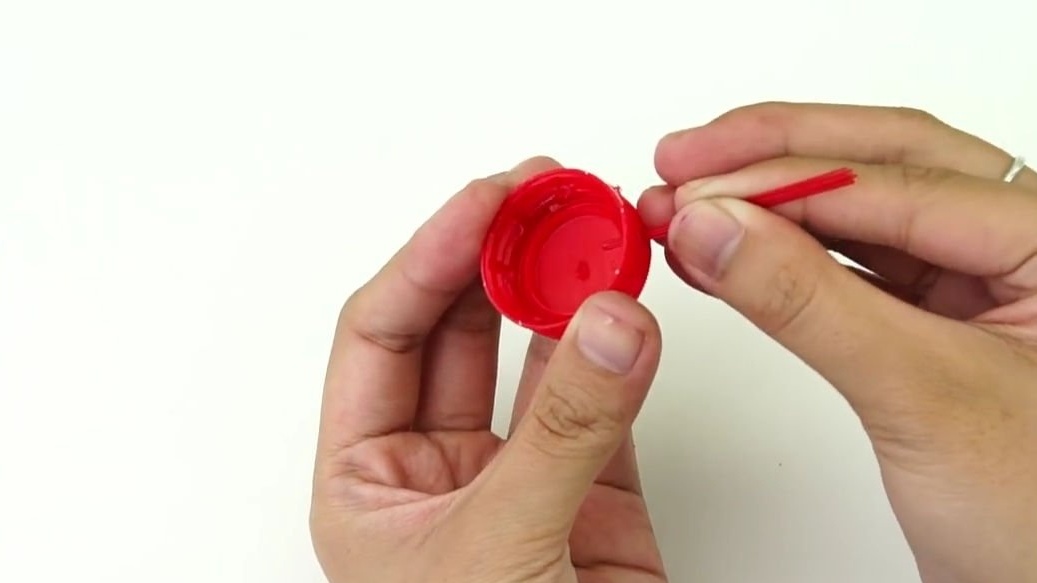
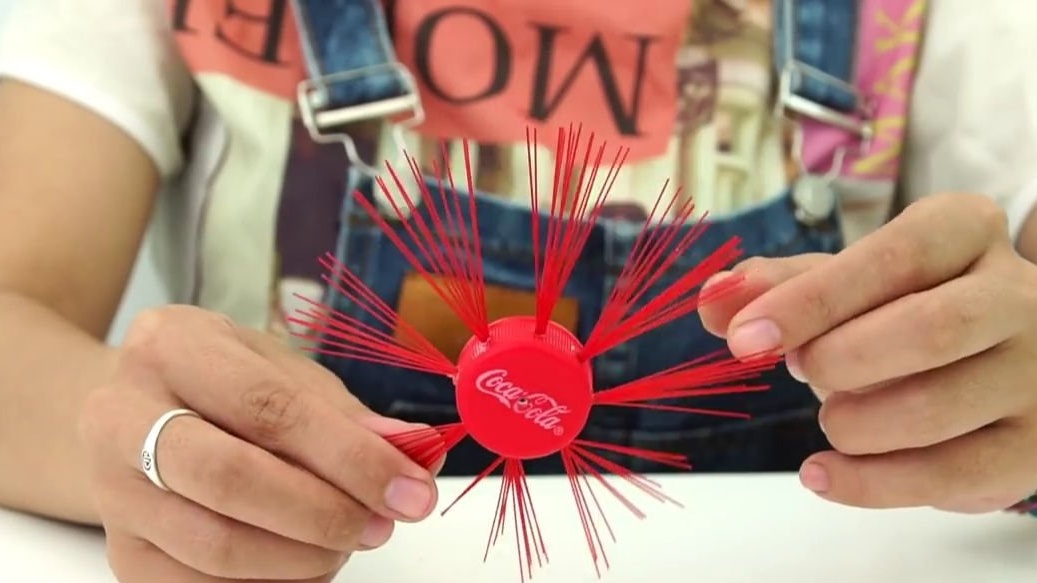
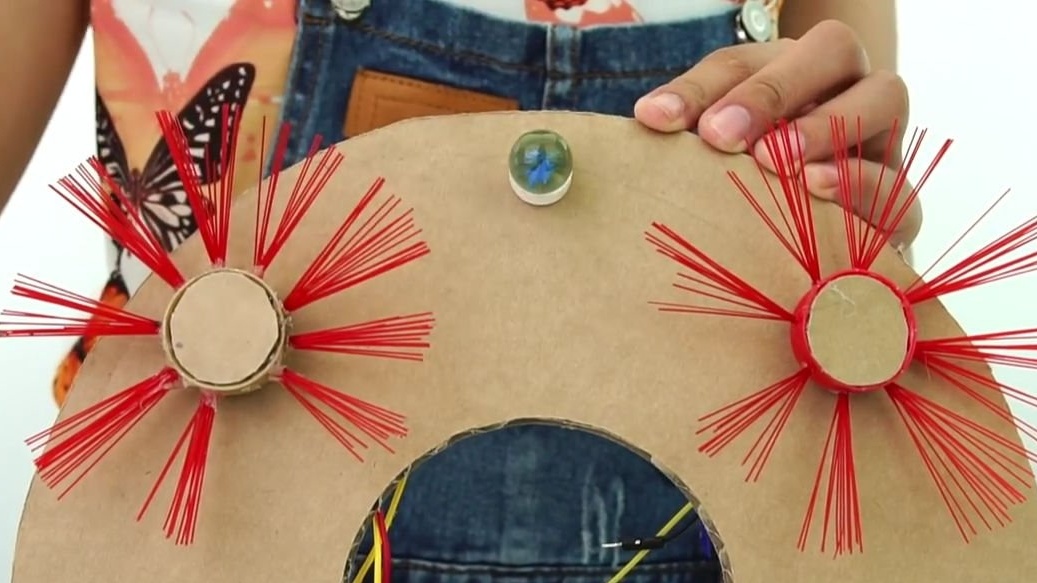
Vi fjerner lokkene fra plastflaskene, vi trenger bare to stykker. Ved å bruke et loddejern, en varm spiker eller en stav, lager vi hull: den ene i midten av lokket, og den andre på sidene med et innrykk på omtrent 1 cm. I hullene som er laget på sidene, trekker vi ut de tidligere tilberedte bustene fra kostet, de skulle være i samme størrelse. Vi fikser disse bustene med varmt lim. Totalt må det lages to slike emner.
Vi limer dem på aksen til små motorer, som er plassert på en pappsirkel. Vi limer igjen med varmt lim:


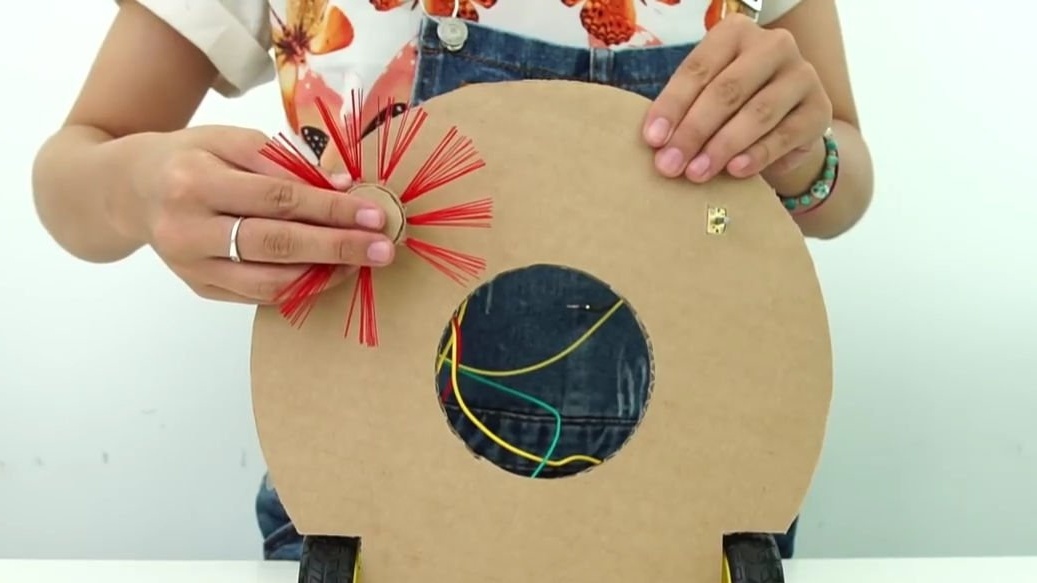

På forsiden, mellom to børster, lim en liten ball eller et lite hjul som kan rotere rundt aksen:
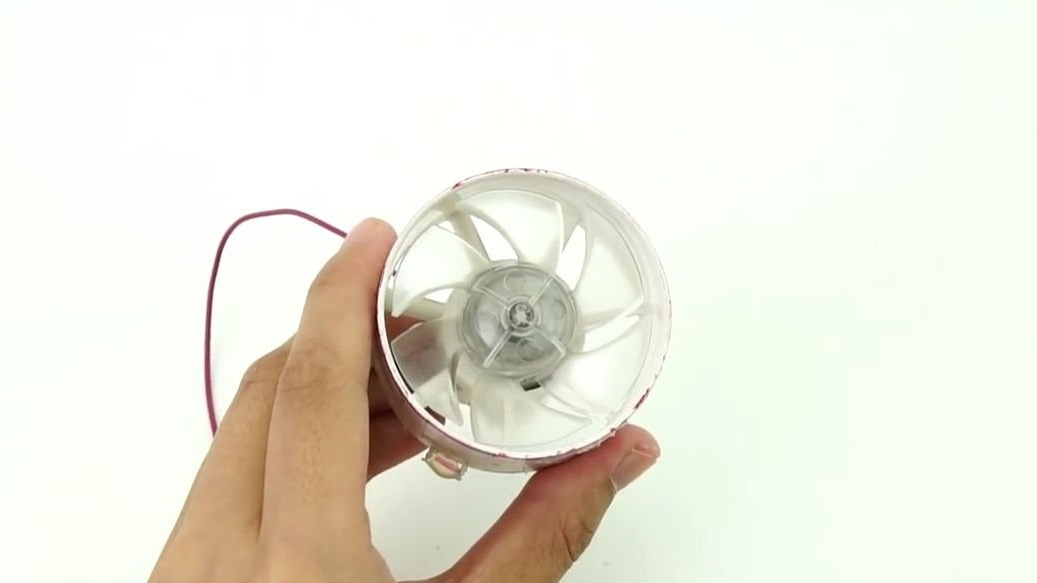
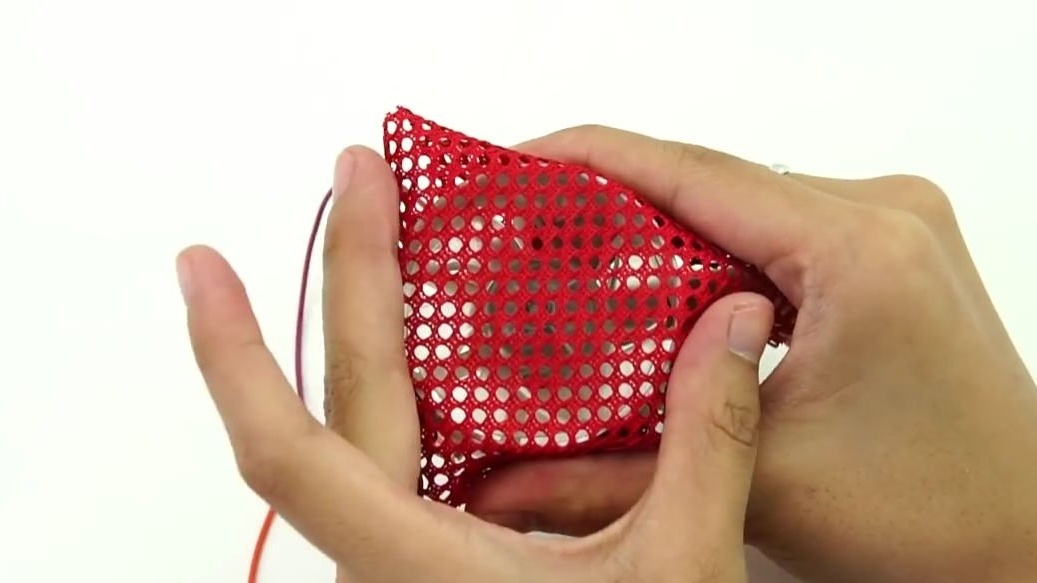
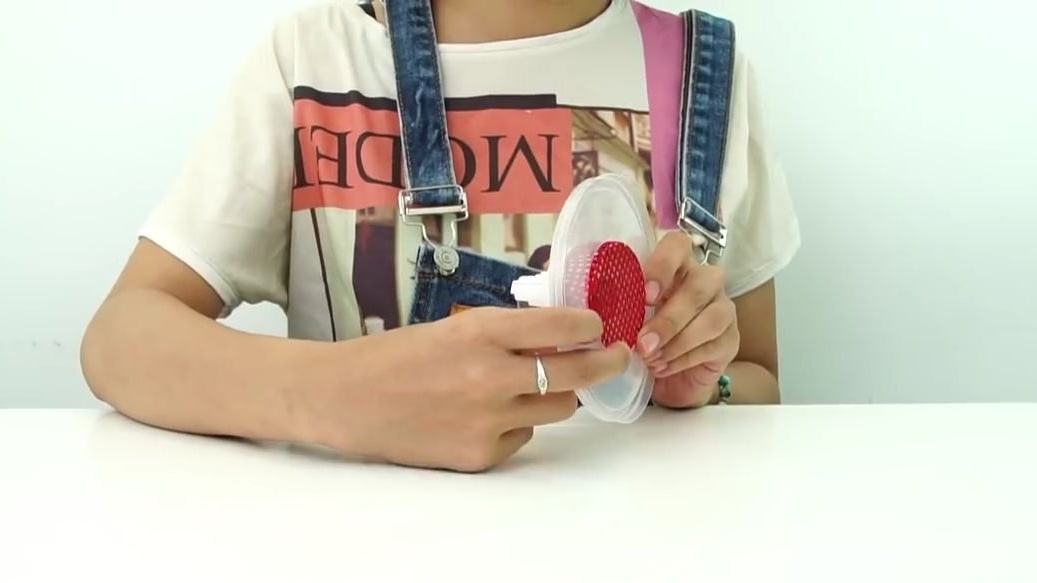
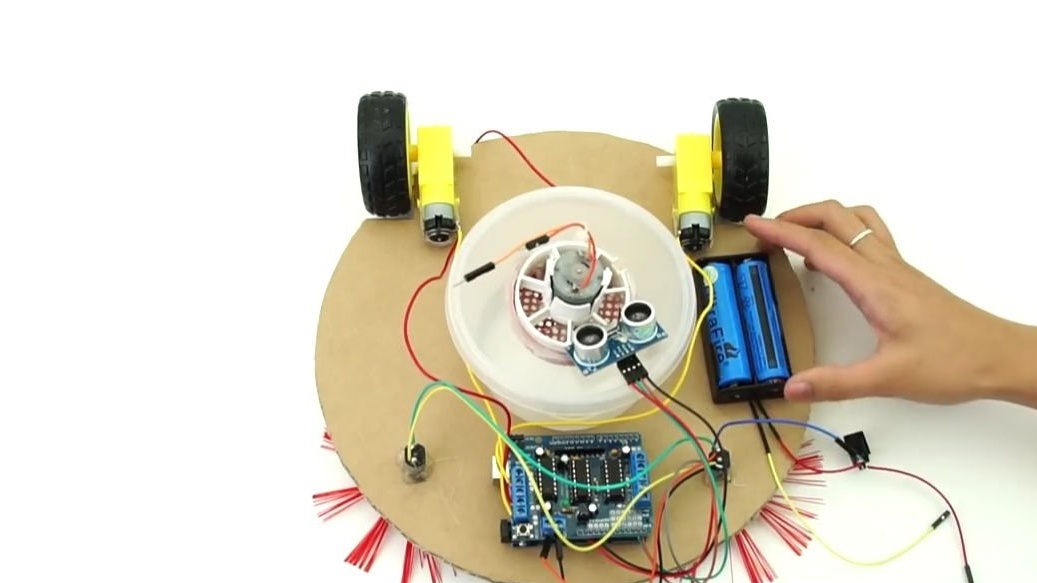
Nå trenger vi en elektrisk motor med en turbin som kan suge inn luft, og generelt kan en veldig kraftig kjøler komme opp. Vi setter på og fikser et plastnett på fronten av turbinen, det er nødvendig for å beskytte turbinen, det vil si for å forhindre at stort rusk kommer inn og siler ut. Fjern lokket fra plastbeholderen. Beholderen skal helst ha rund form. I lokket lager vi et jevnt rundt hull der du trenger å sette inn og lim turbinen med et nett. I selve beholderen lager vi et lite rektangulært hull med kanten. Vi legger lokket med turbinen på beholderen, og du er ferdig. Sugedelen av roboten er ferdig. Jeg vil minne deg på at alt må gjøres som vist på bildet nedenfor:



Vi tar bunnen av roboten og installerer en beholder med en turbin i det sentrale hullet og limer alt fast med varmt lim. Deretter, på siden av strukturen, installerer vi en boks med 18650 batterier og en bryter koblet til en av ledningene som kommer fra boksen. Vi kobler til nye ledninger for å drive Arduino, vi lager endelige hårklipp og vi kan fortsette.
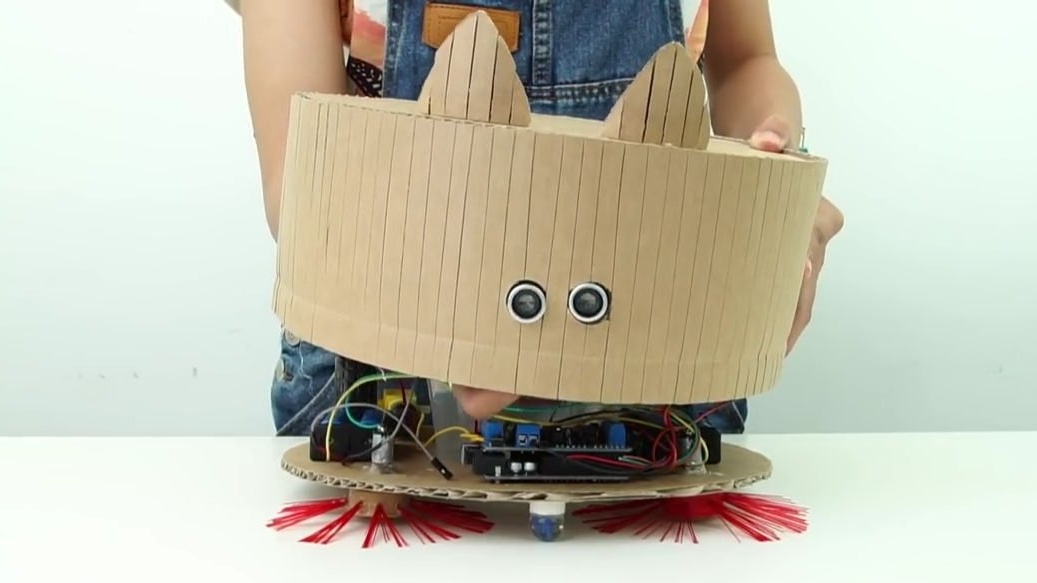
Vi setter inn ultralydområdesøkeren i spesielle hull som må gjøres på forhånd i robotlegemet. Som du husker, ble denne bygningen laget i begynnelsen. Forfatteren av artikkelen la også til dekorative elementer i form av ører, og en ultrasonisk avstandsmåler kommer ut i stedet for øyet, alt dette ser veldig bra ut. Vi legger saken over basen av strukturen og fikser den, men ikke så veldig, for i så fall må du få batteriene til lading.Selvfølgelig kan du installere en modell for å lade batterier direkte i roboten, men det er usannsynlig at den erstatter lading av høy kvalitet.
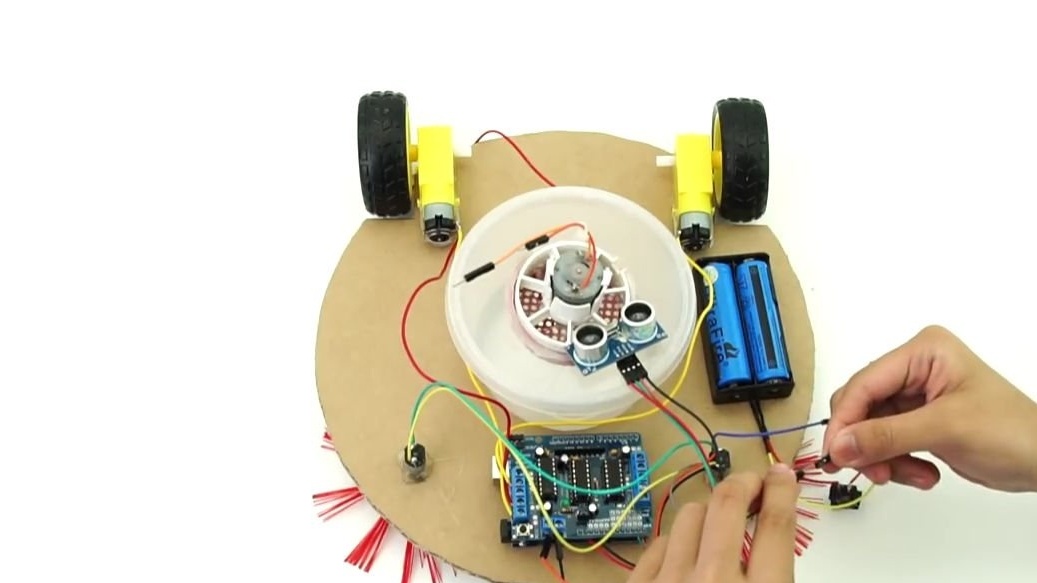

Det gjenstår bare å laste opp firmware til Arduino, generelt er det best å gjøre dette etter å ha koblet alle elektroniske komponenter for å sjekke kretsen og koden, men du kan gjøre det senere. Det er best å skrive en skisse for å helle på Arduino selv, men du kan ganske enkelt finne på internett en ferdig skisse for roboter med en ultralydsensor som reiser rundt et hinder, og fordelen med slike skisser er nå fullført. Men for å unngå forskjellige fallgruver, er det bedre å skrive selvstendig, selv.
Vel, det er det! En enkel og funksjonell robotstøvsuger er klar, og det gjenstår bare å teste den! For å gjøre dette er det bare å slå på den og begynne å sykle på gulvet og støvsuge alt søpla. Roboten beveger seg og snur seg når hindringen nærmer seg, og dette er mye mer praktisk enn tidligere modeller.



Her er en video fra forfatteren med en detaljert samling og hjemmelagde tester:
Du kan også drive denne roboten fra en kraftig bank. Du kan selvfølgelig se min detaljerte gjennomgang for en god en som vil være interessert i dette:
Vel, alle lykke til i fremtidige prosjekter, venner!