


I denne artikkelen vil veiviseren fortelle oss hvordan han laget en robot-bartender kontrollert av en smarttelefon.
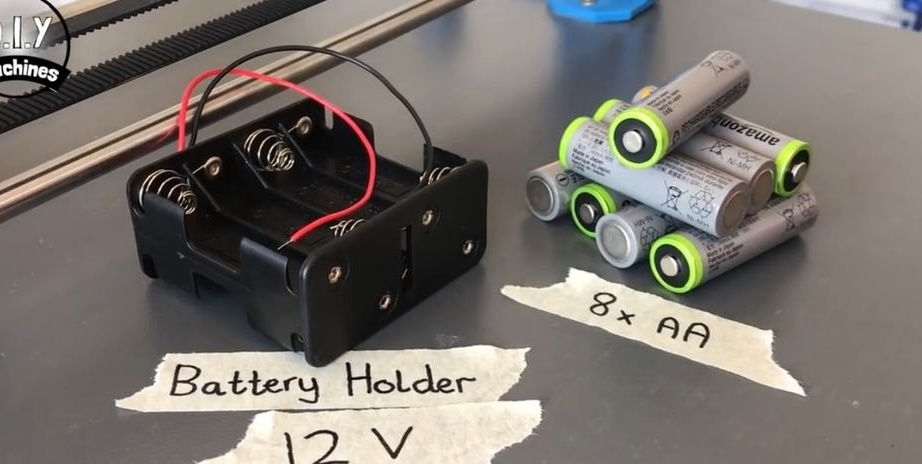
Funksjoner på enheten: arbeid på Arduino, rimelig pris, Bluetooth-kontroll fra hvilken som helst gadget, autonomi (arbeid fra 8 AA-batterier).
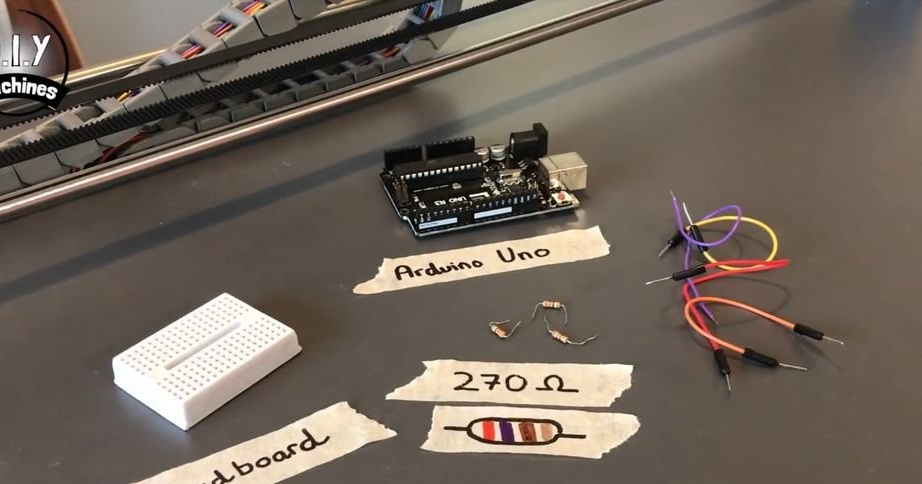
For å bygge en slik enhet, brukte mesteren følgende
Materialer og verktøy:
-Arduino uno;
-Drivermotor L293D;
- kontaktbryter;
-Linear lagre;
-Trinn motor;
-Rem og remskive (versjon 2m);
-Rem og remskive (versjon 5m);
-HM10 Bluetooth-modul;
-En skrutrekker;
-Krepezh;
-Nozhki;
-Tabell topp;
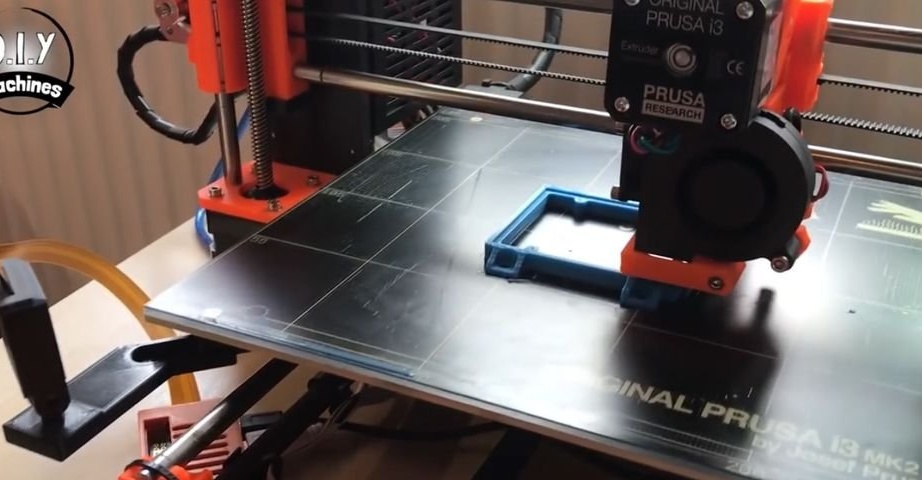
-3D skriver;
-Metal stenger;
- skrutrekker;
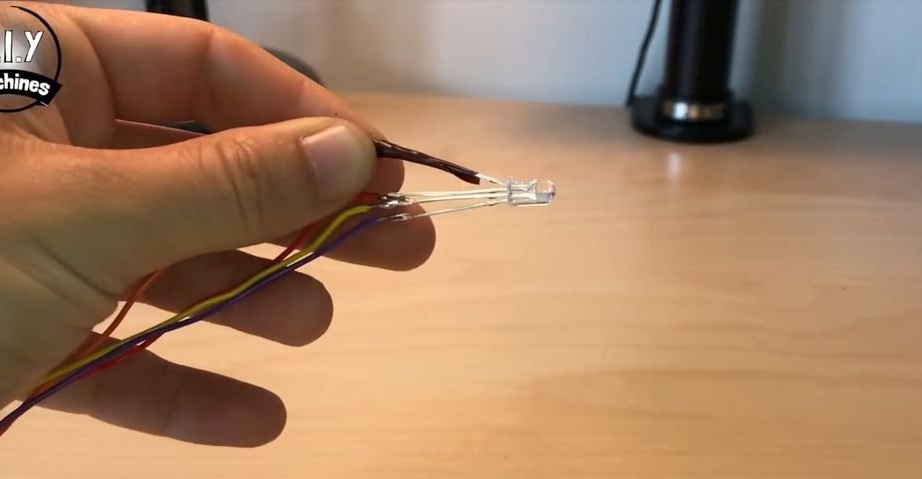
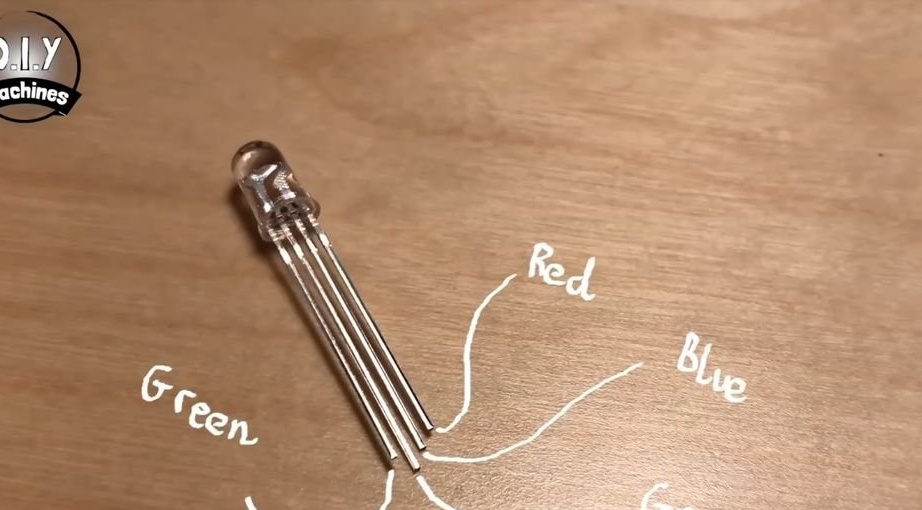
- RGB LED;
seeing-;
Lodding tilbehør;
-Izolenta;
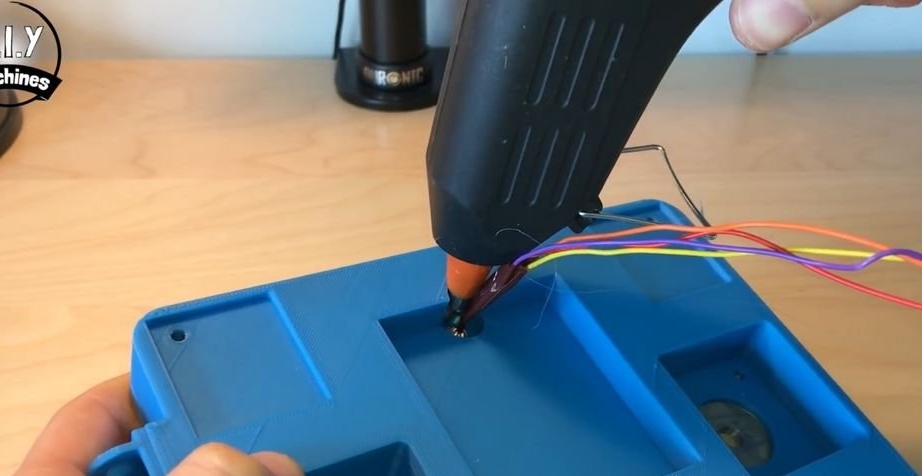
Limpistol;
-Batterirom;
-Konnektory;
Button-Type batteriet;
-Datamaskin med programvare;
- Holdere for flasker;
-Den ventil;
-Flaske;
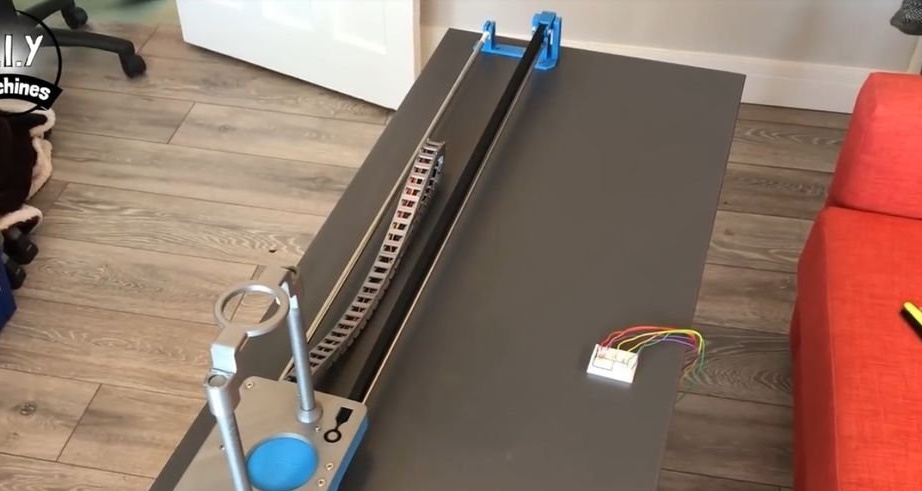
Trinn en: tabellen
Først samler mesteren bordet. Bordstørrelse 120 * 45 cm. Bordtykkelse 18 mm.


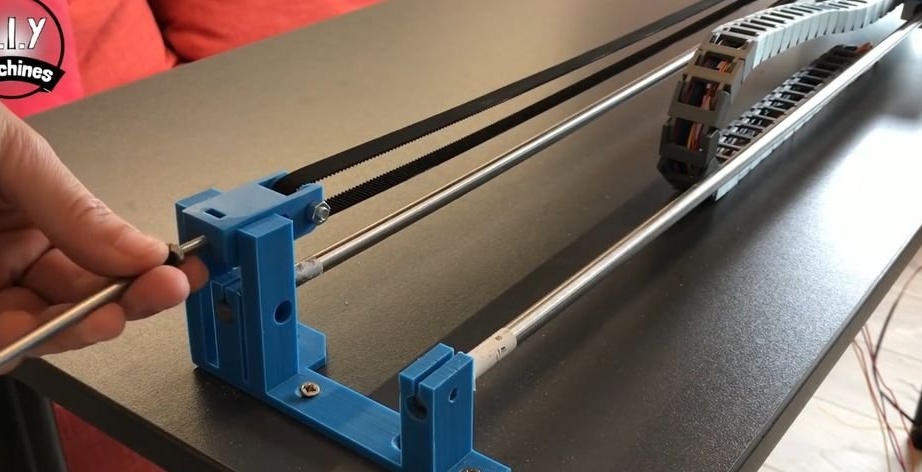
Trinn to: Strammer
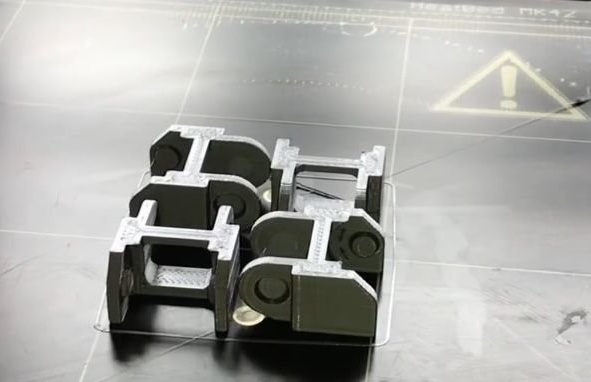
Filer for utskrift av deler kan lastes ned nedenfor.
3D-utskriftsfiler.
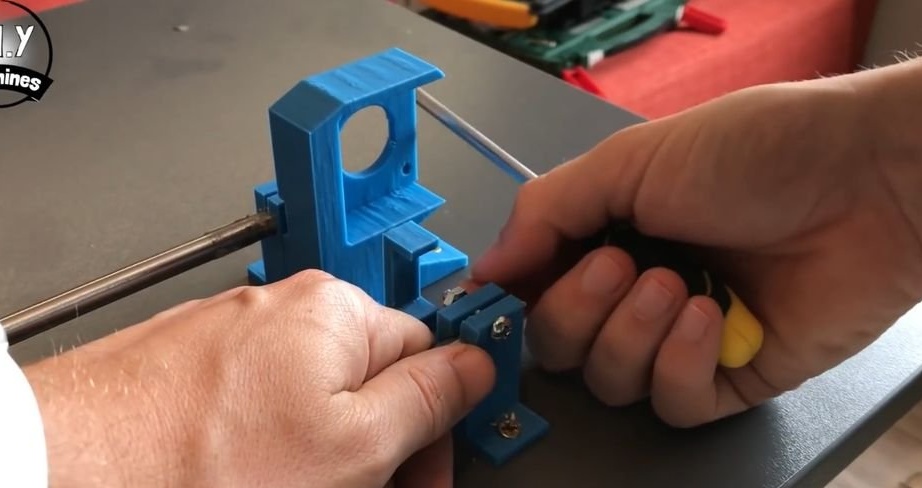
Nå vil det være nødvendig å skrive ut de to første detaljene “idler.stl” og “Rod_Clamp_V5.stl”.
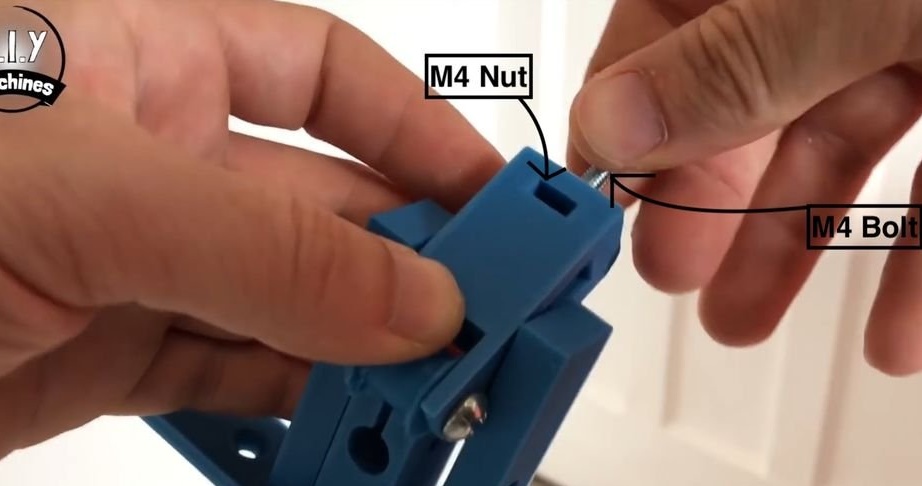
Etter utskrift er det nødvendig å feste strekkvalsen til stilkeklemmen ved hjelp av en lang M4-bolt og mutter. Sterk klemming er ikke nødvendig, da rullen må rotere fritt.
Så er de to delene festet sammen.
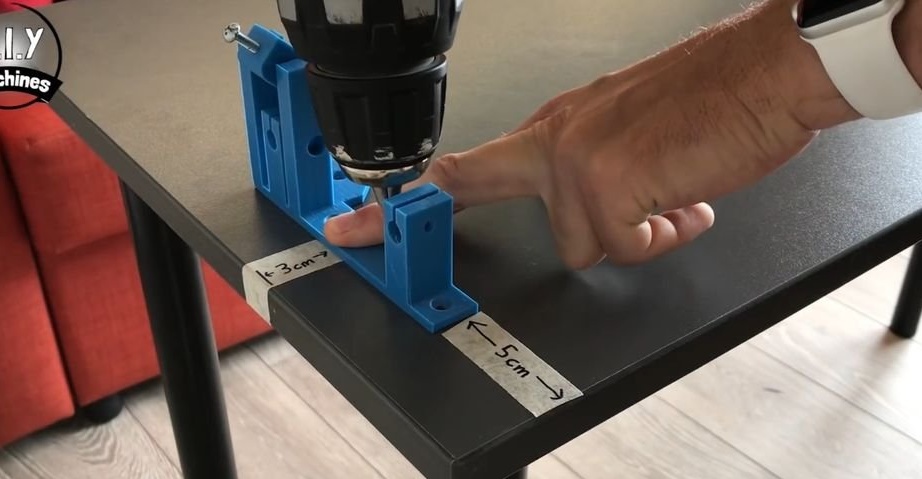
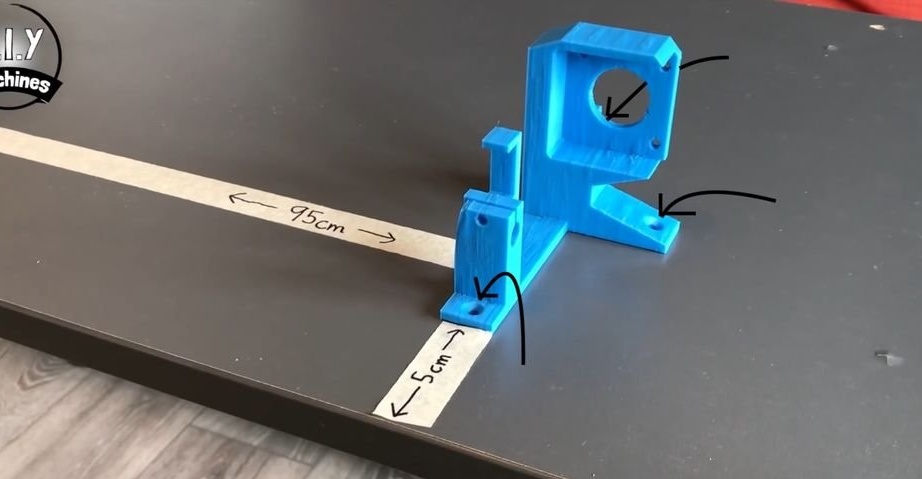
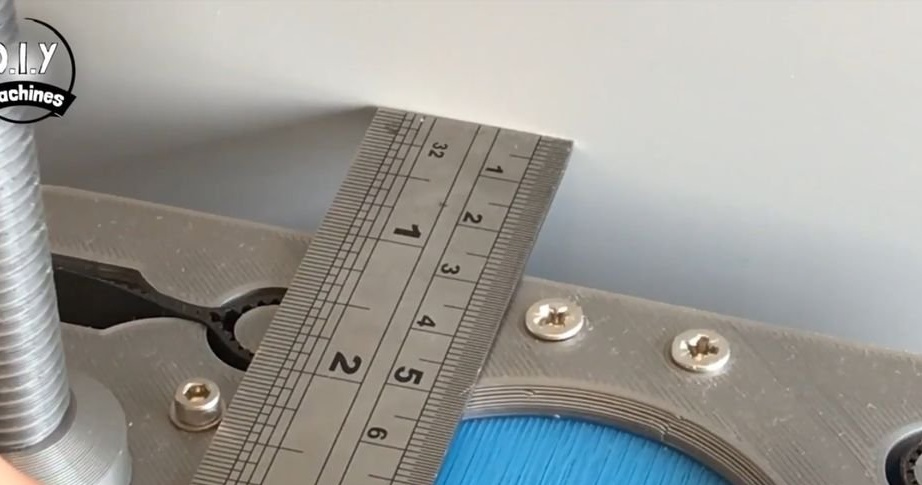
Merker på et bord 3 cm fra venstre kortside og 5 cm fra forkanten og strammer strammeren.

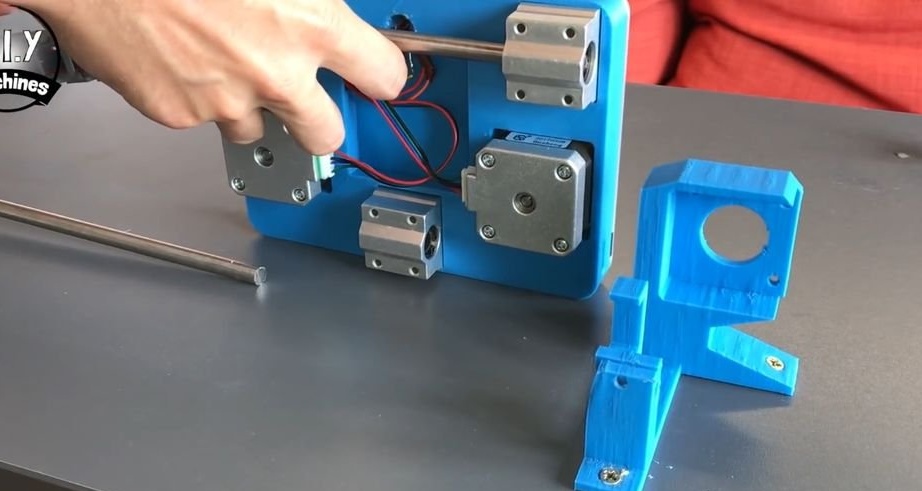
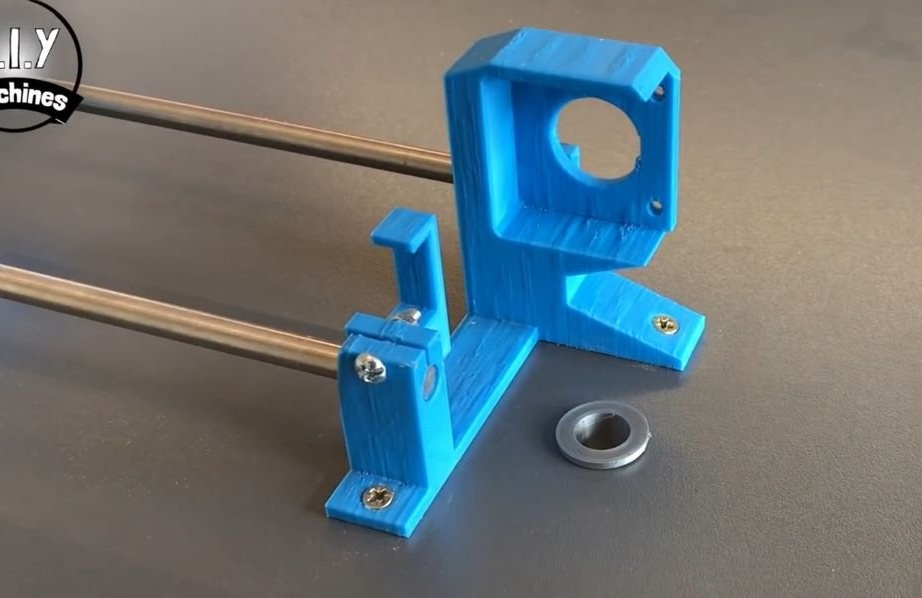
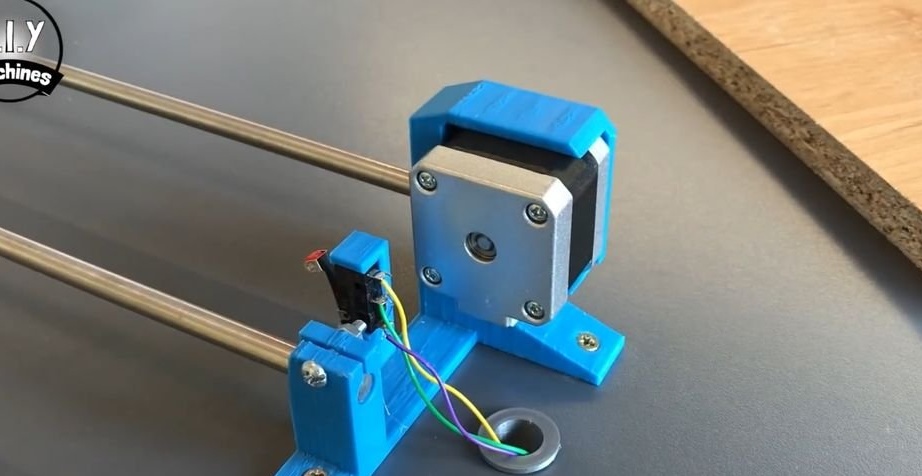
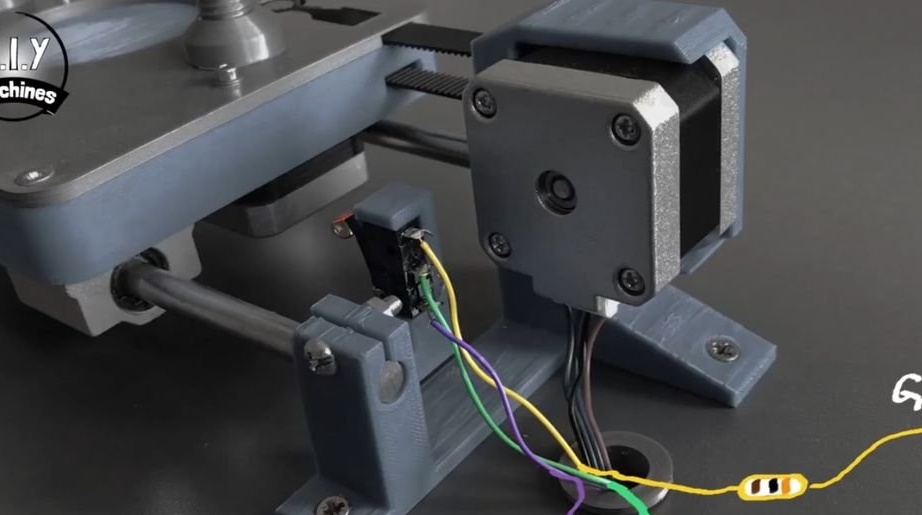
Trinn to: Motormontering
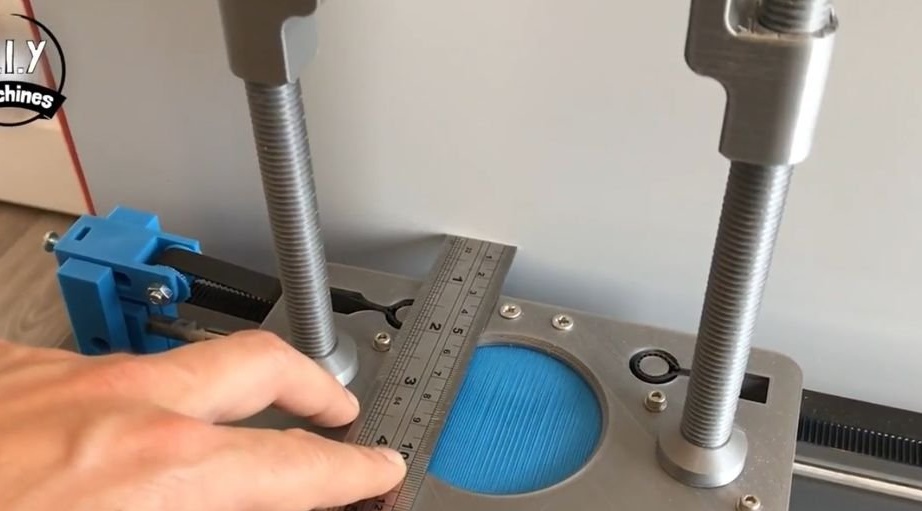
Skriver ut motorfestet, filen "X_Axis_Motor_Mount.stl". Festes på bordplaten i en avstand på 95 cm fra strammeren og 5 cm fra kanten av bordet.
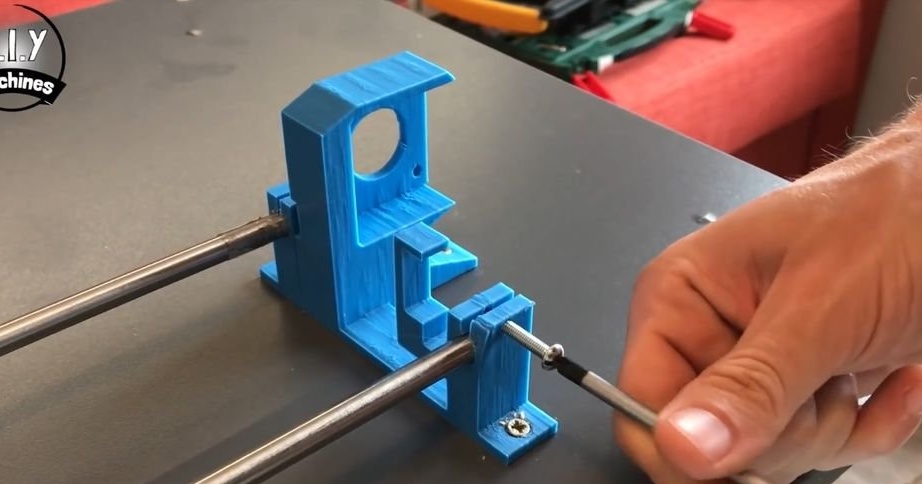
Trinn tre: Guider
Setter guider. Lengden på stengene er 1 meter.
Trinn fire: LED
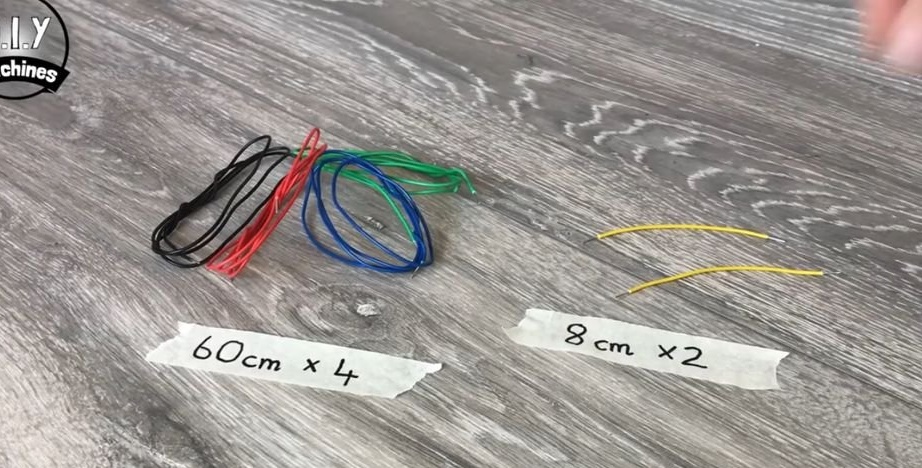
Master vil bruke RGB LED for indikasjon. Lodde 180 cm ledninger i forskjellige farger til hvert ben. Krysset isolerer.




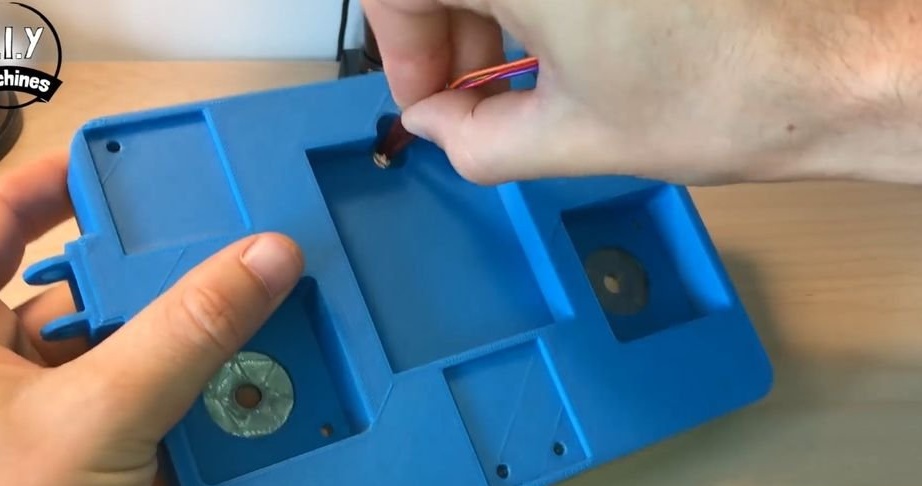
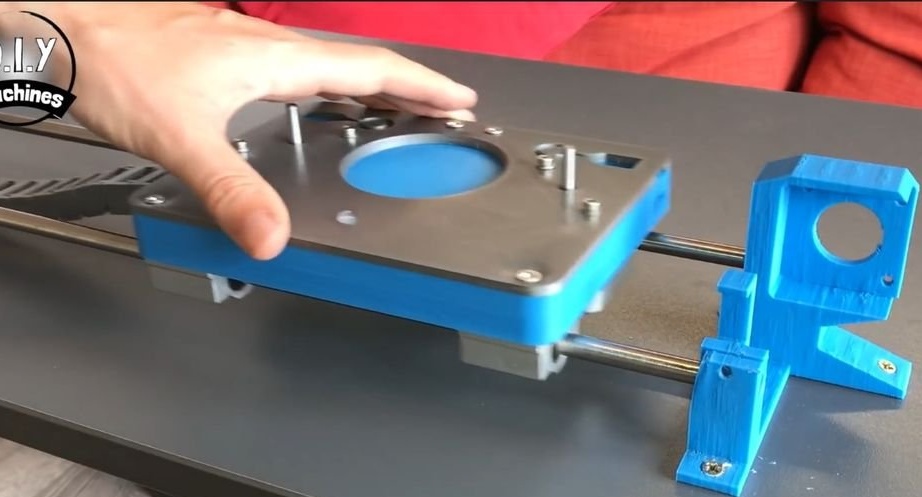
Trinn fem: plattform
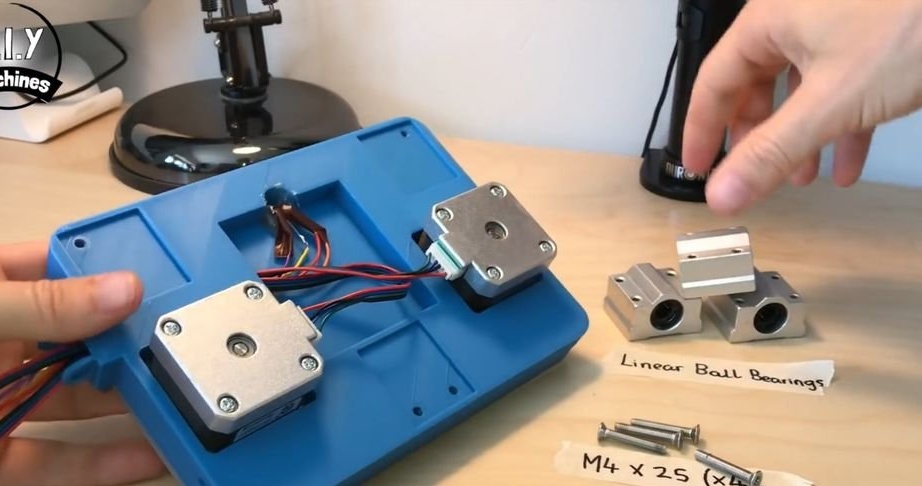
Skriver ut delen 'slider_base_v3.stl'. Fikser en LED. Installerer trinnmotorer.
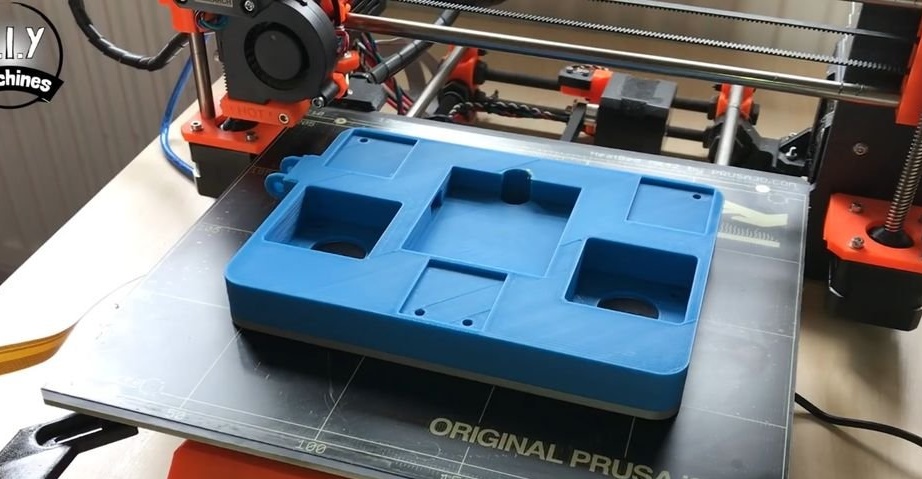

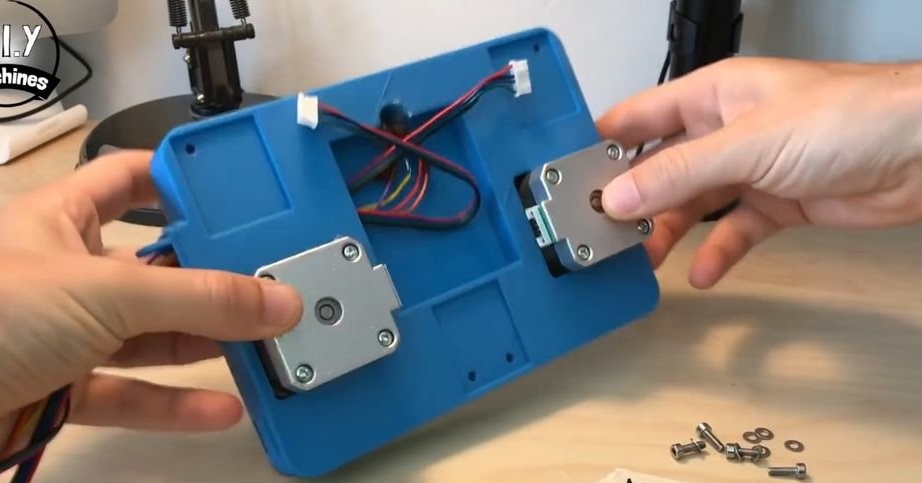
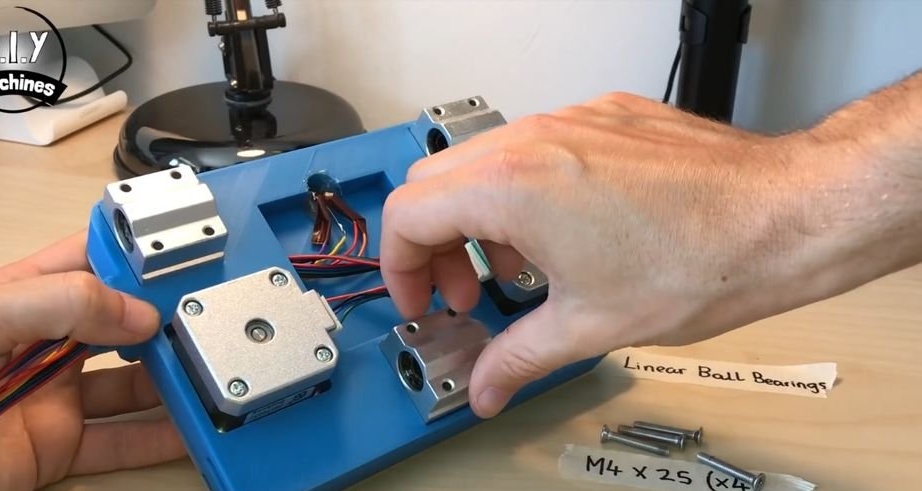
Installerer lineære lagre.
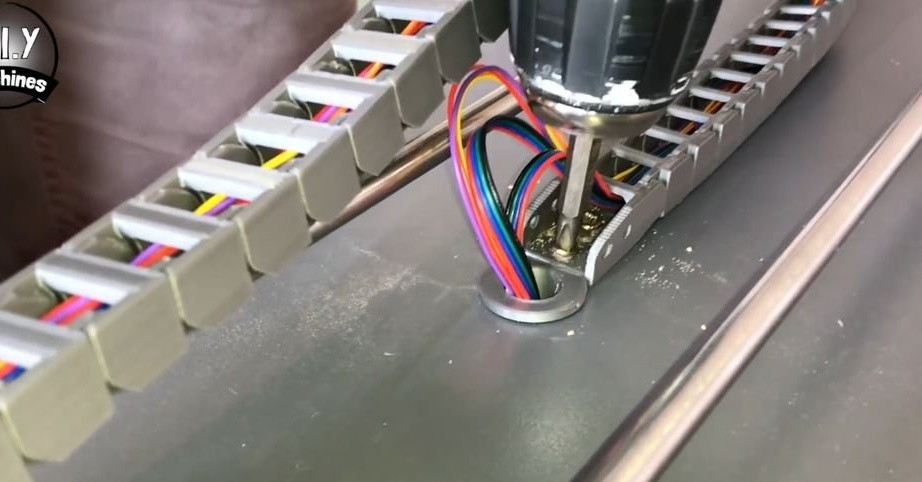
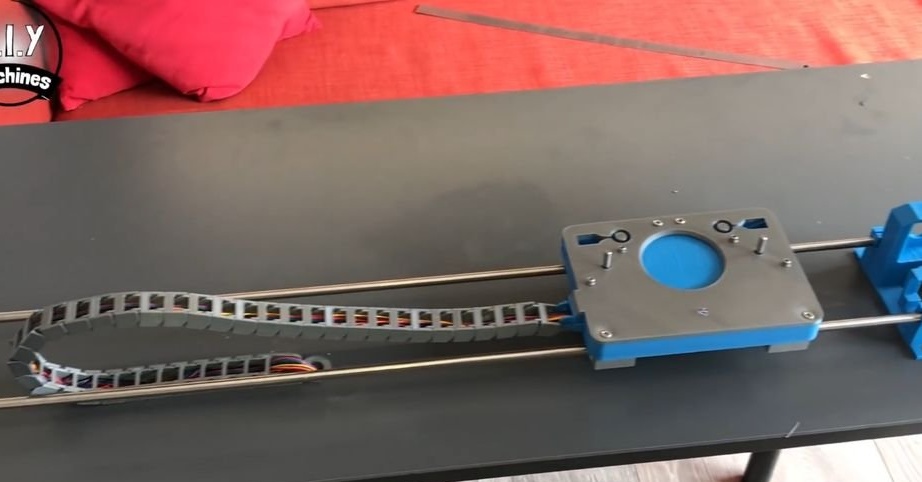
Trinn seks: Kabelkanal
Kabelkanalen for enheten består av separate segmenter koblet i en enkelt krets.Inne i kretsen legges ledninger. Kjeden er bevegelig og bøyes om nødvendig. Kjedessegmenter skrives også ut på skriveren.


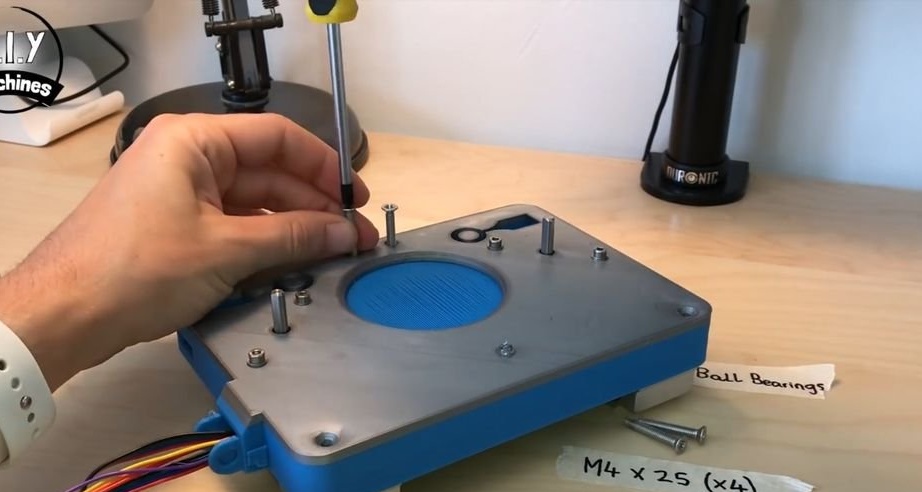
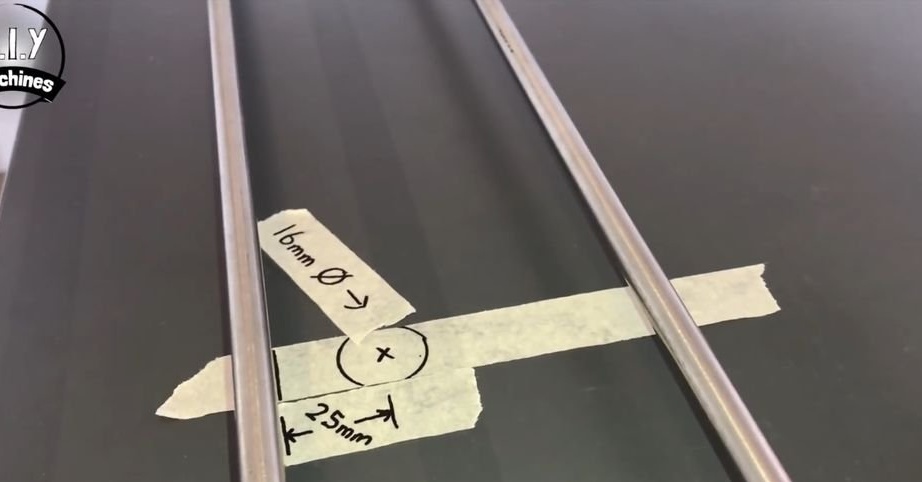
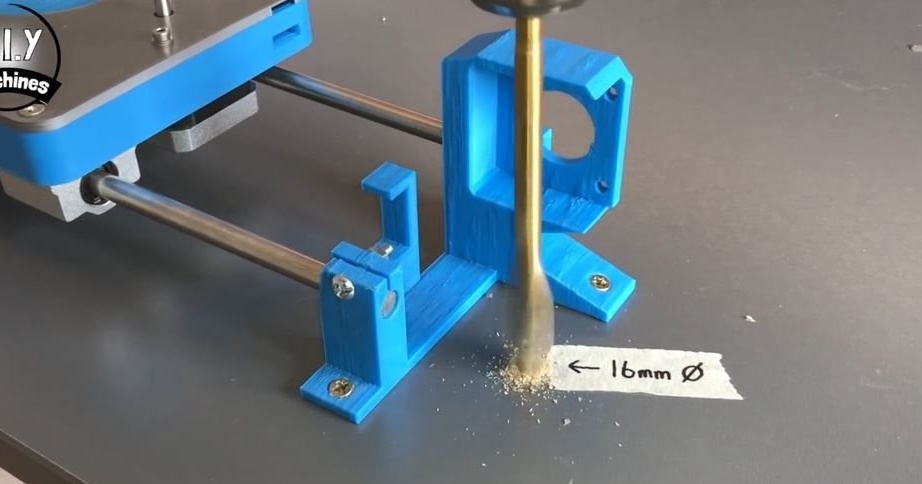
Bor et hull på 16 mm i en avstand på 25 mm fra den ekstreme føringen og 47 cm fra strammeren. Sett ermet "Table_Tidy.STL" inn i hullet. Fest kabelkanalen den ene enden på plattformen, den andre på benkeplaten ved siden av hylsen. Strekker ledninger.



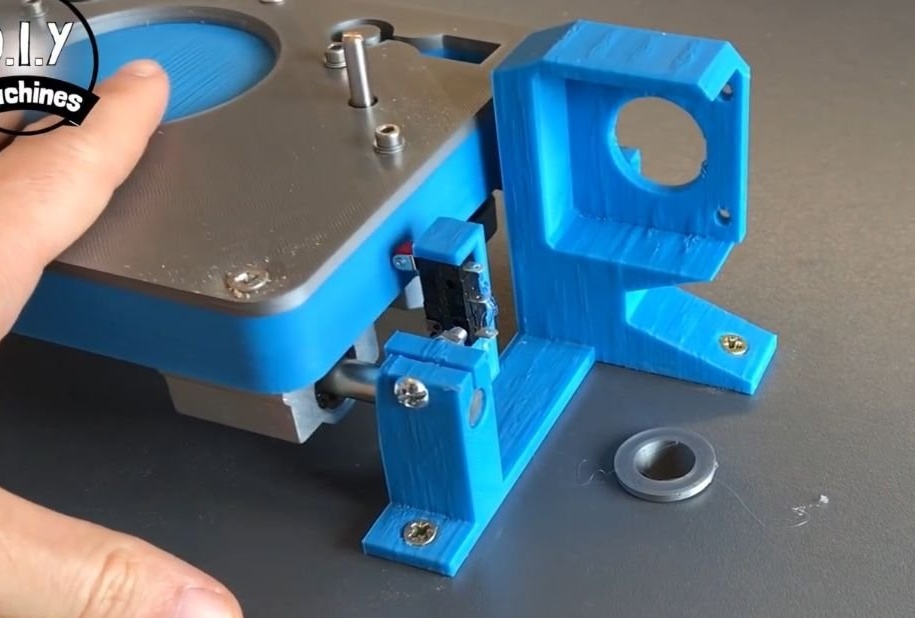
Syvende trinn: bytte
Ved siden av motorfestet bores ytterligere 16 mm hull. Sett en erme i den. Fest hengeren til festet. Lodd til kontaktene for 1 meter ledning.

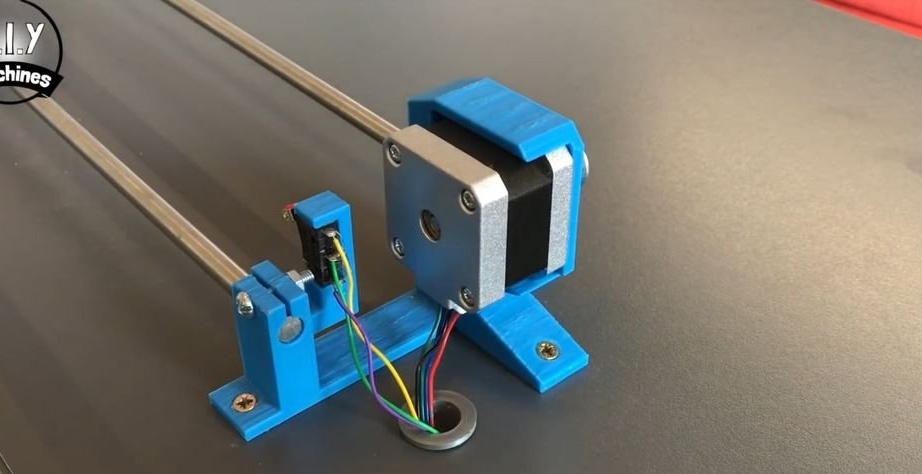
Trinn åtte: X-aksen motor
Sikrer motoren til å montere.

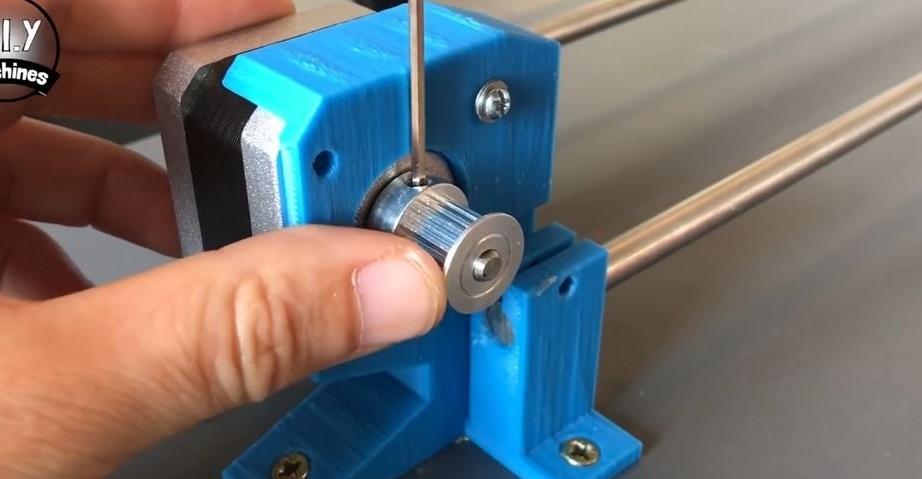
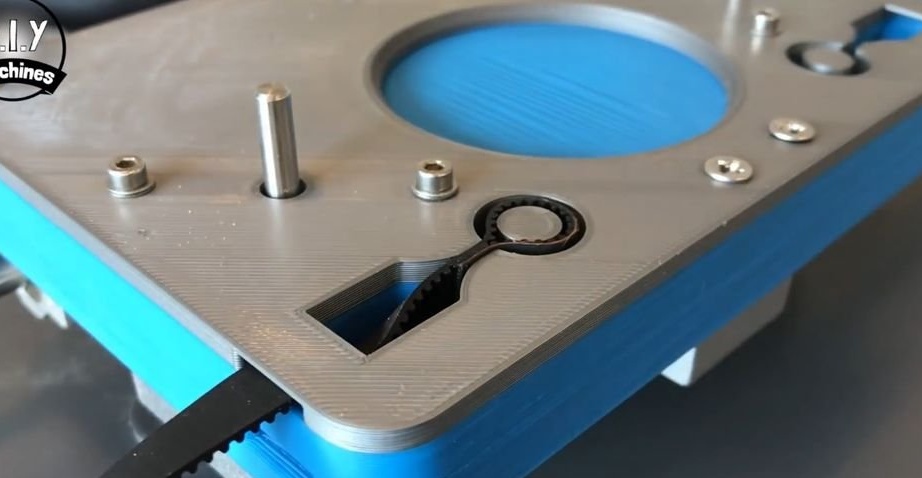
Trinn ni: belte
Fest remskiven til motorakselen. Fest enden av beltet til plattformholderne. Trekker beltet gjennom trinsen og gjennom strammehjulet. Fest den andre enden til holderne. Om nødvendig kan beltespenningen justeres ved å stramme eller skru ut skruen.







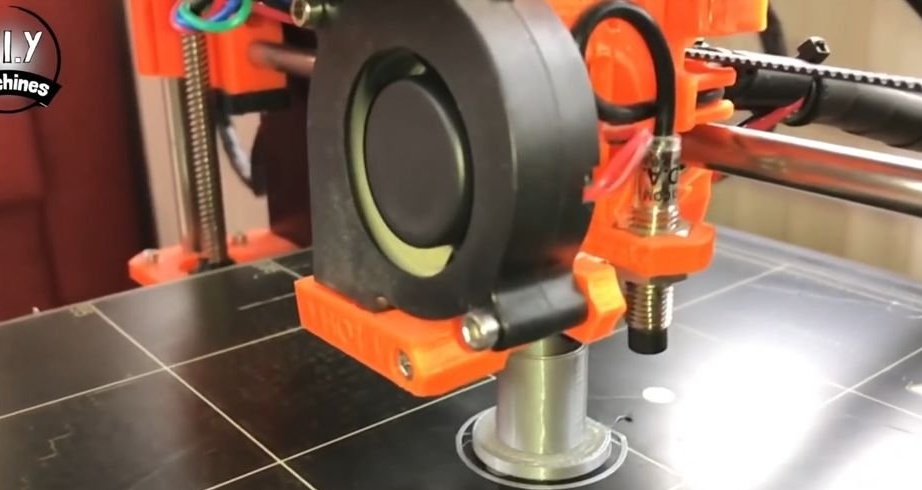
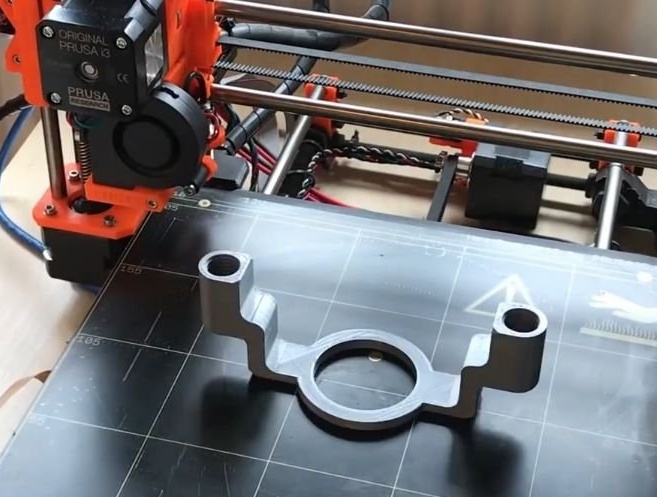
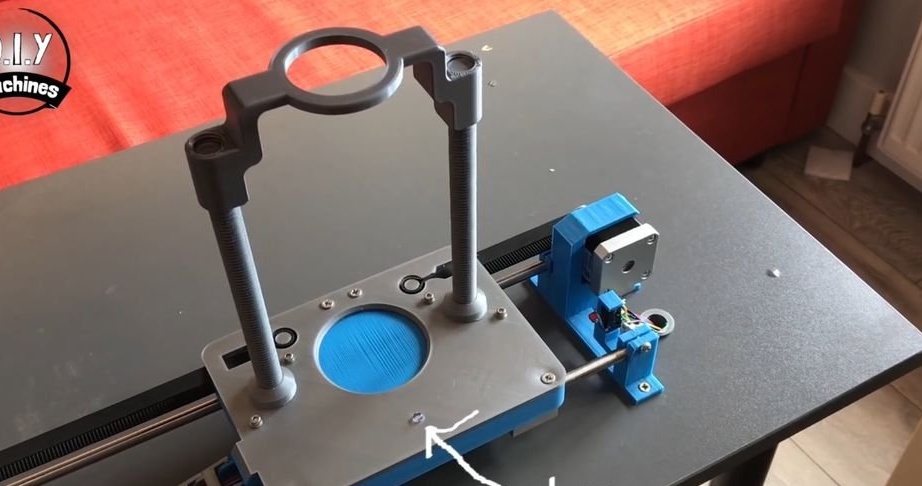
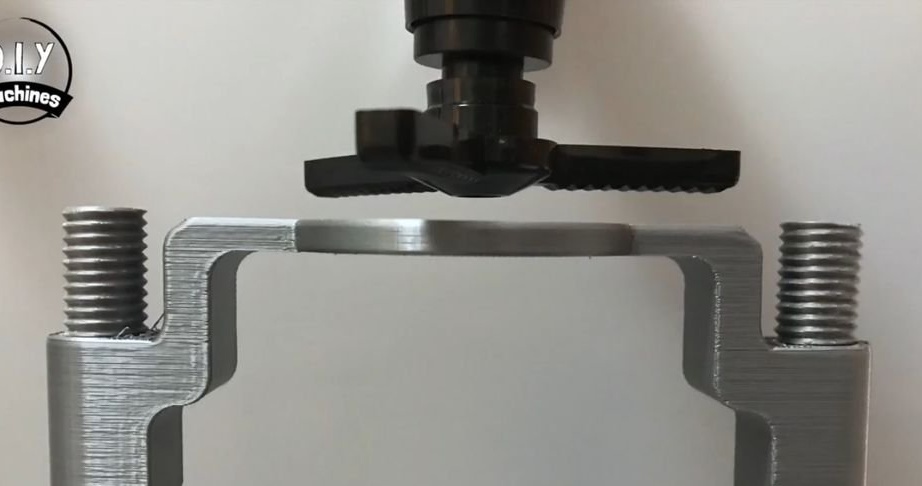
Trinn ti: Cupholder
Skriver ut to gjengede stenger main_rod2.3.STL og holder Dispenser_Paddle_V2.STL. Festes på en plattform.



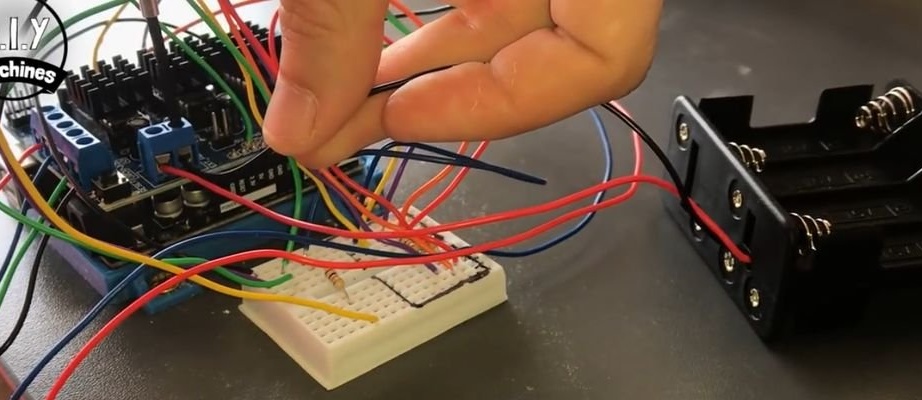
Trinn elleve: indikator, trailer, brødbrett
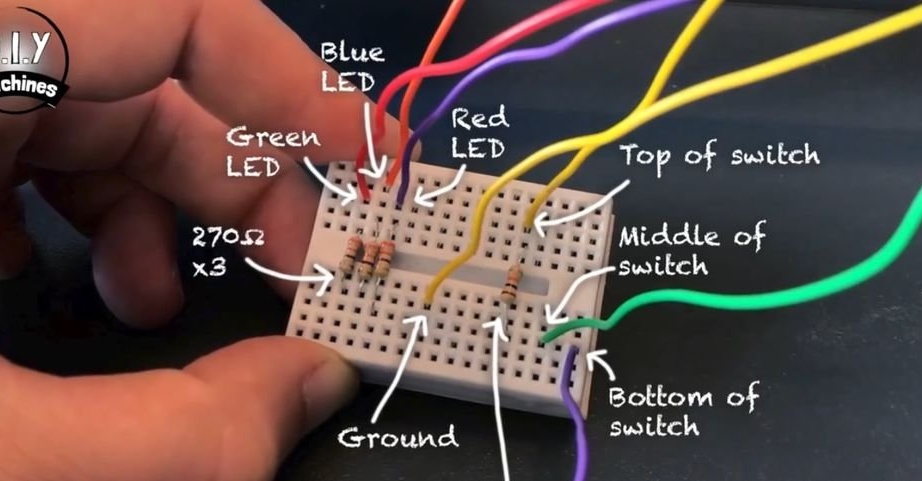
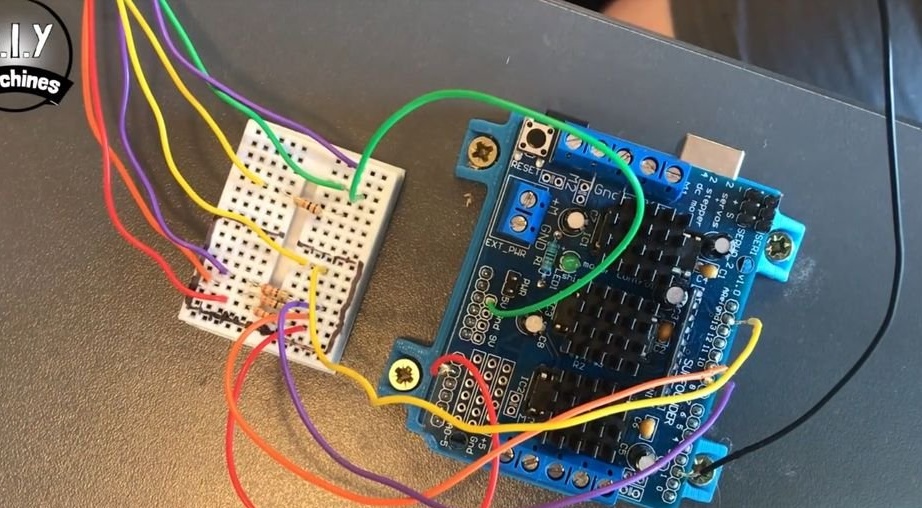
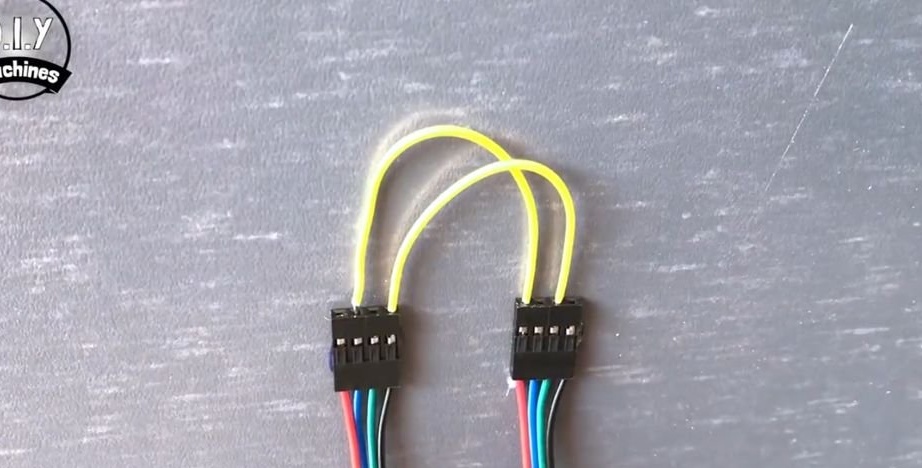
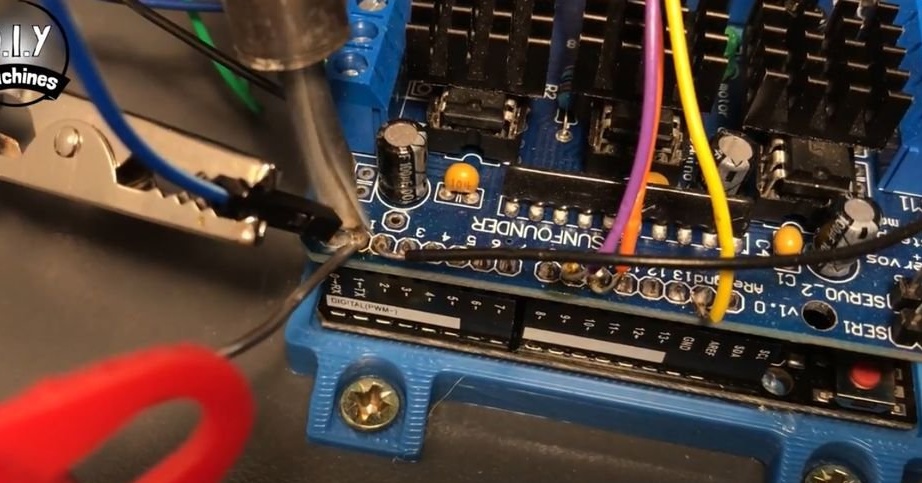
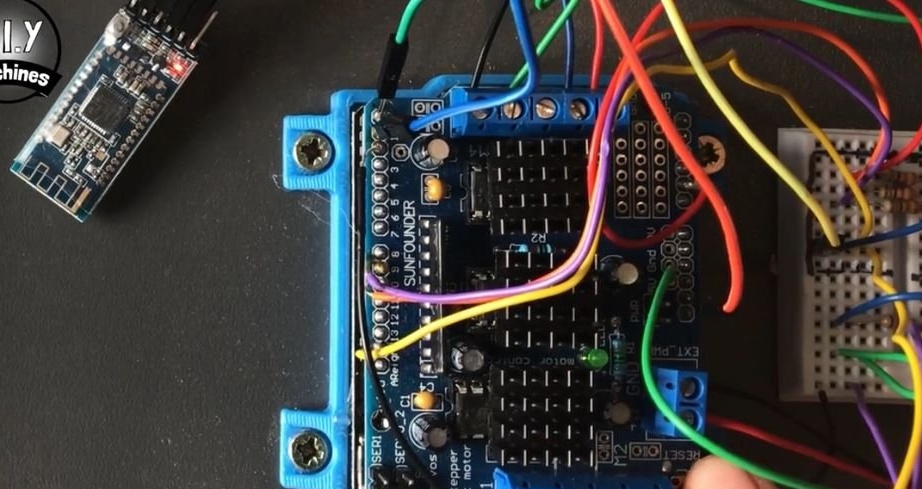
RGB LED, har fire ben. Det ene benet er vanlig og tre i fargen. Skipsføreren tar ytterligere fire ledninger, hver omlag 15 cm lange, og selger dem på følgende måte (av fargene på LED-glød) til motordrivermodulen:
Rødt for å pinne D9
Blått til pin D10
Grønn for å pinne A1
Katoden til GND-pinnen.
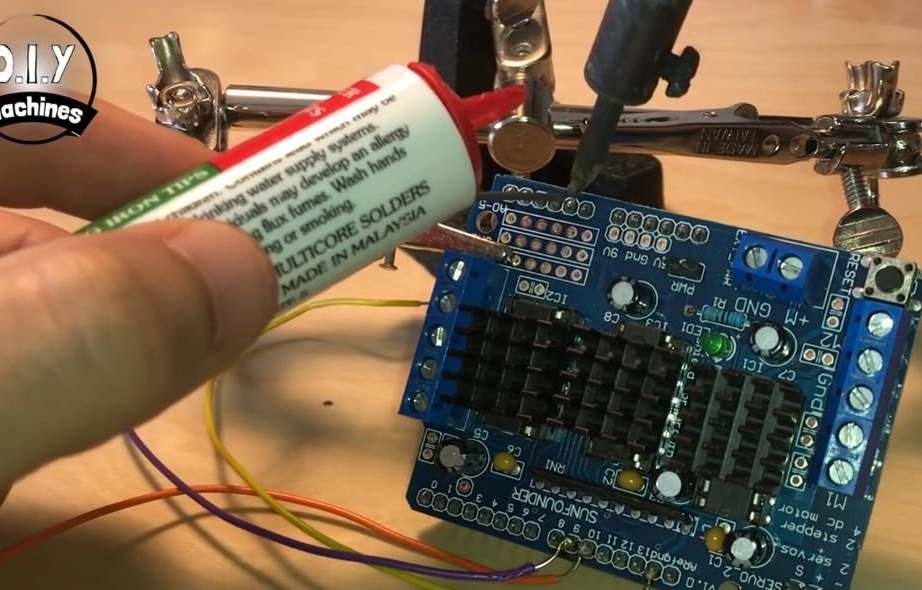
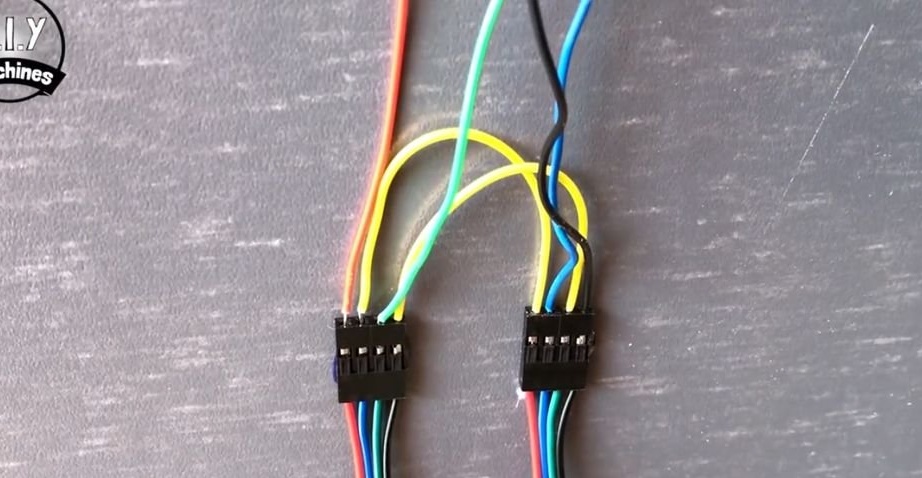
Den kobler tilhengeren: den øvre kontakten er GND, den midterste kontakten er 5 V, den nedre kontakten er utgang nr. 2.
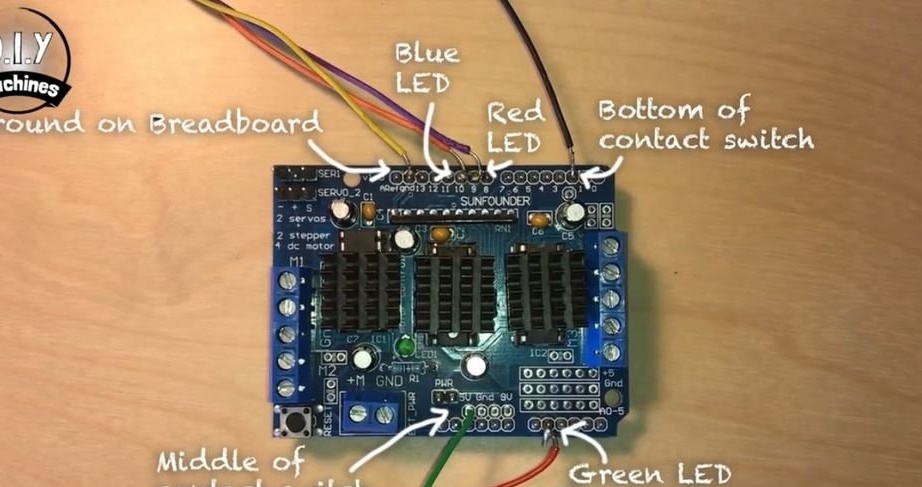
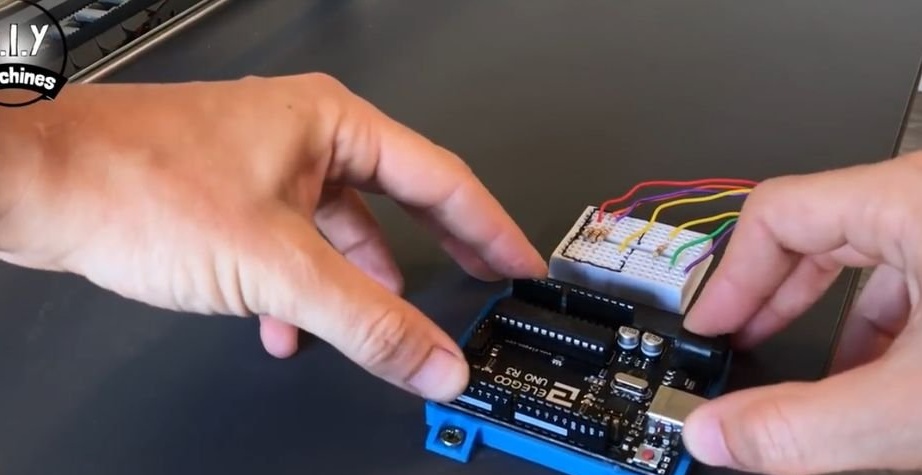
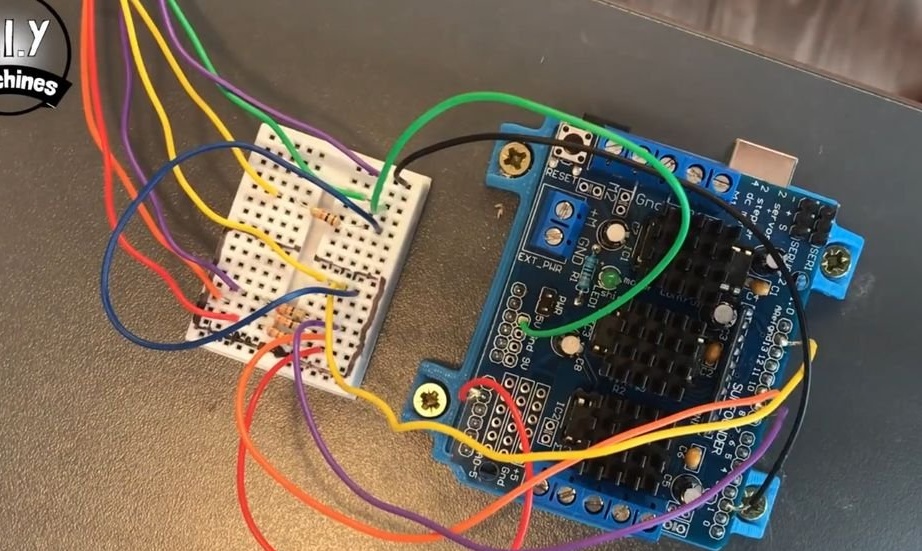
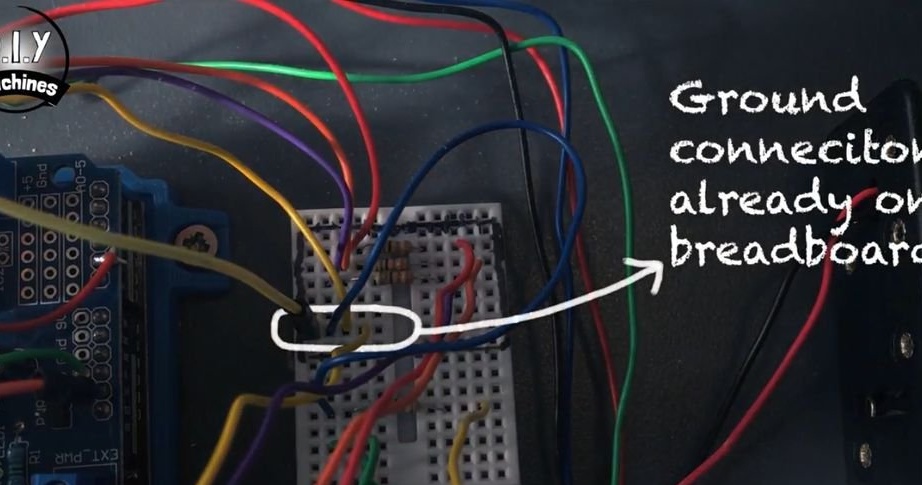
Neste monterer alt på en brødplate (se bilde). Fest brettet til bordet.
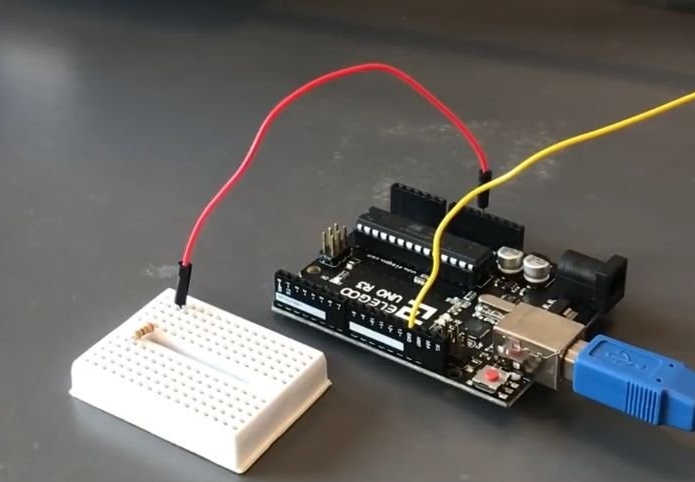
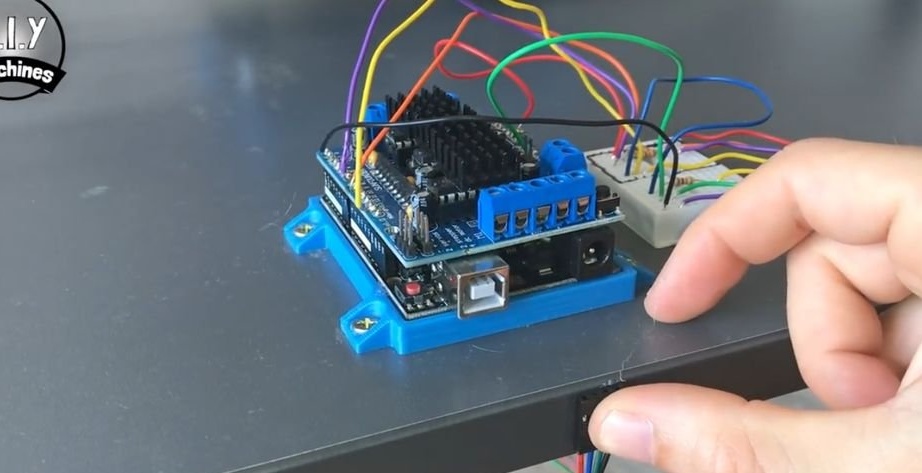
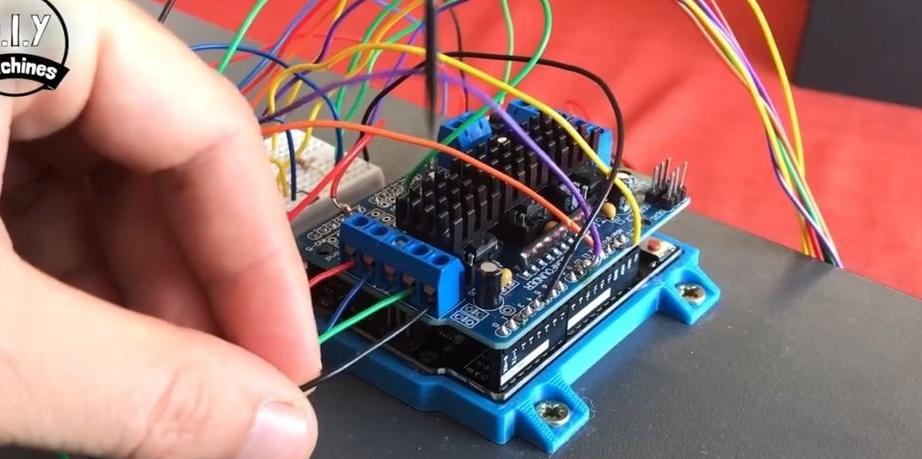
Trinn tolv: Arduino
Skriver ut monteringsplate for Arduino. Fest tallerkenen til bordet. Festes på en tallerken med Arduino. Installerer en motordrivermodul på Arduino.
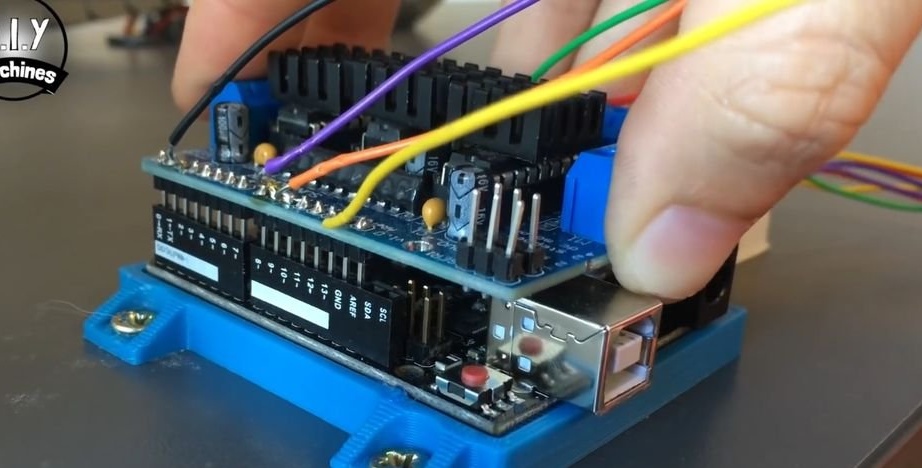
Kobler ledningene fra driveren til brødbordet, som på bildet.
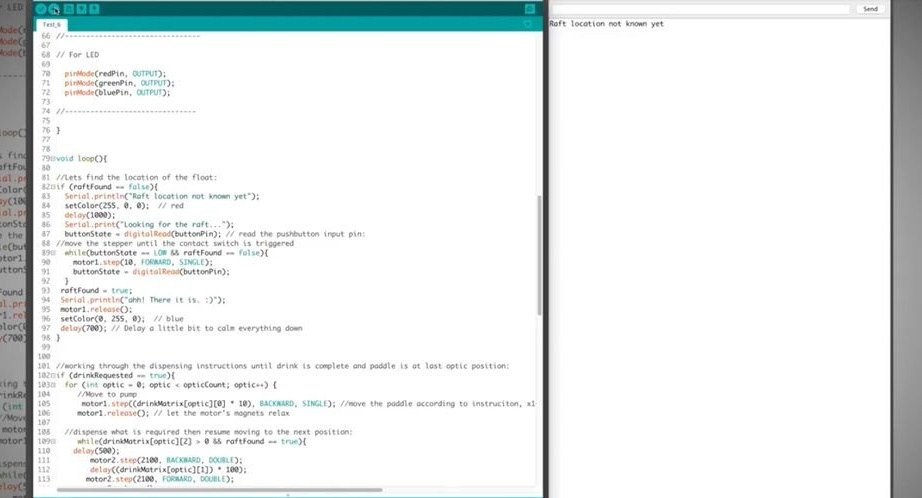
Trinn tretten: Last ned kode
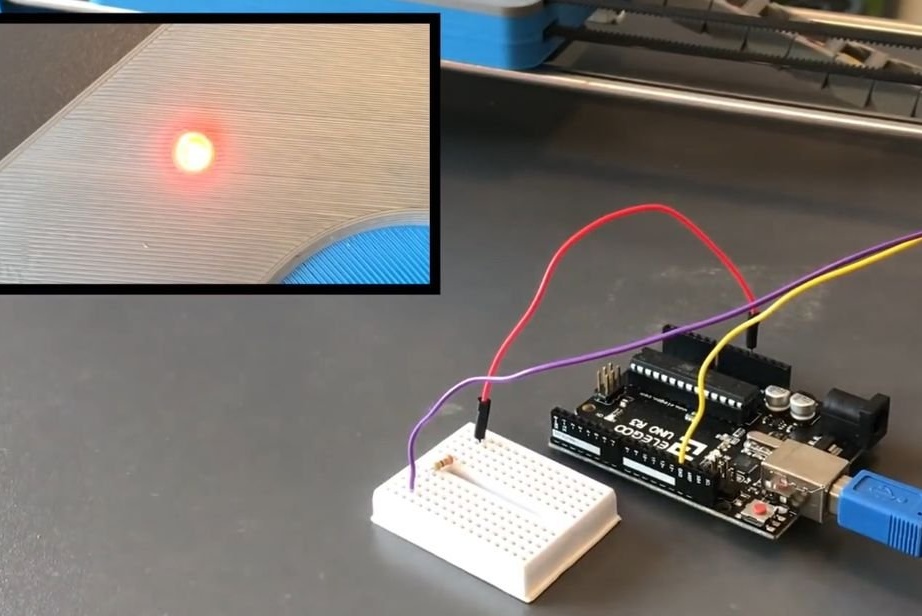
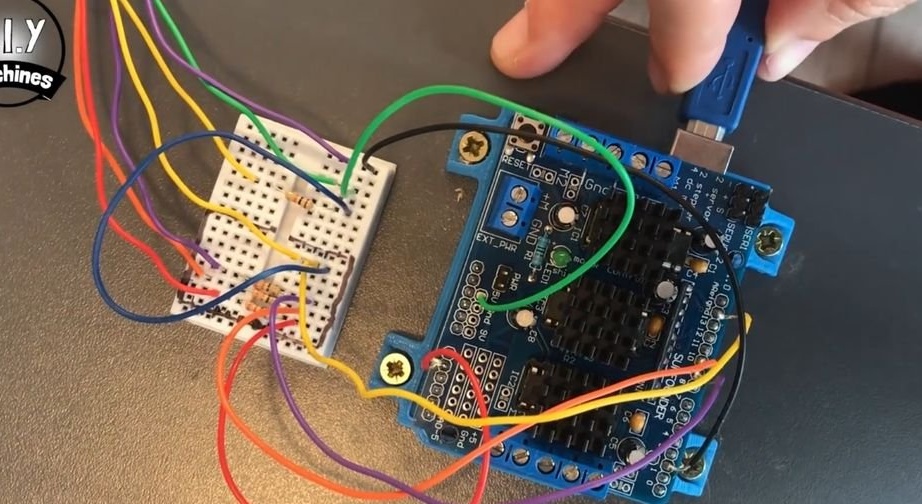
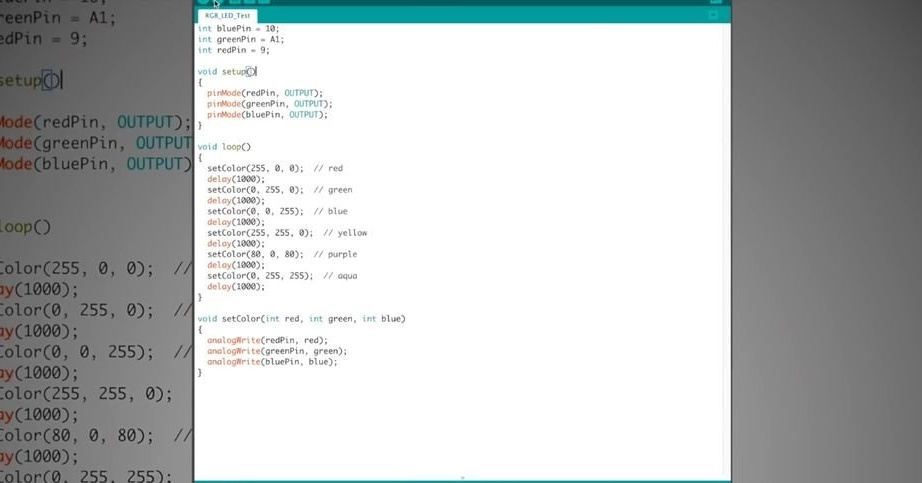
Kobler Arduino til en PC og laster ned koden. Kode finner du her.
Kjører LED-testkoden. Lysdioden skal lyse opp i forskjellige farger.
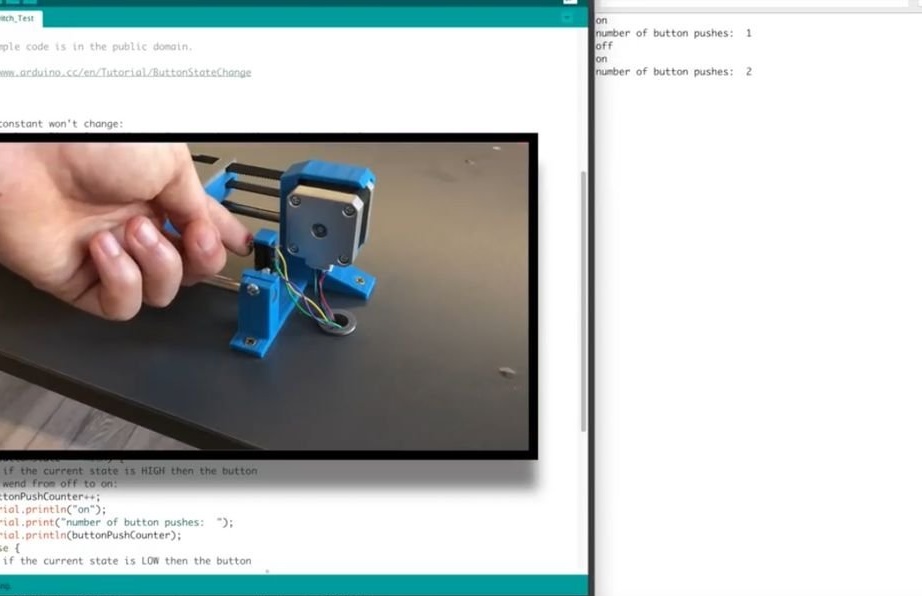
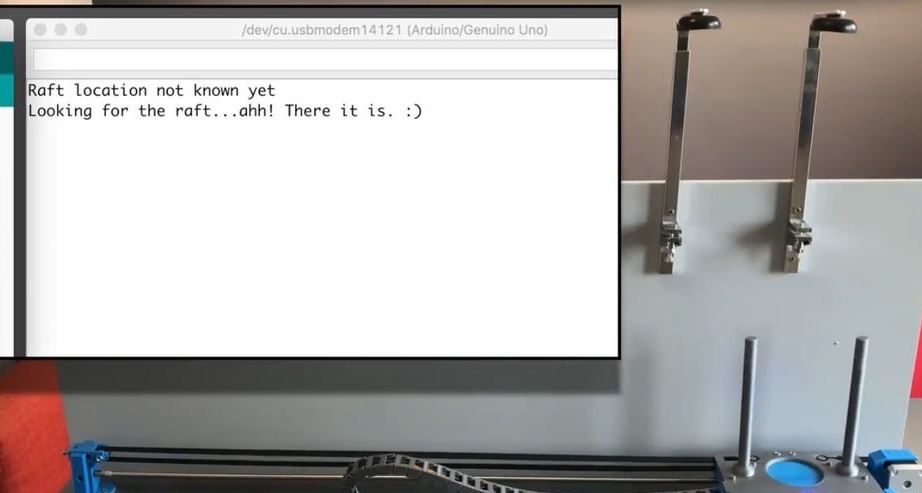
Følgende skript å laste ned er "Contact_switch_test". Så snart den er lastet inn, skal hvert trykk på begrensningsbryteren vises på skjermen.

Trinn fjorten: koble X- og Z-motorene
Sikrer kontakten som kommer fra motoren X gjennom brødbordet på bordet. Kobles til med førerkabler.
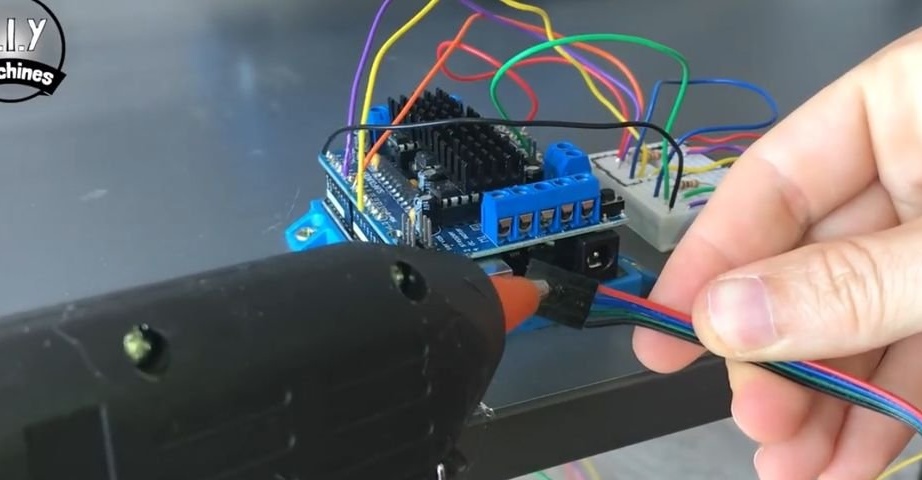
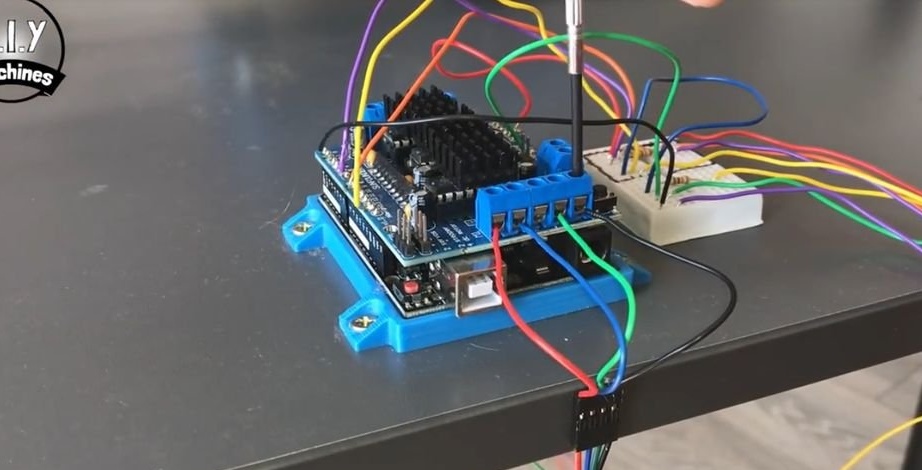
Kobler til Z-aksen trinnmotorer.
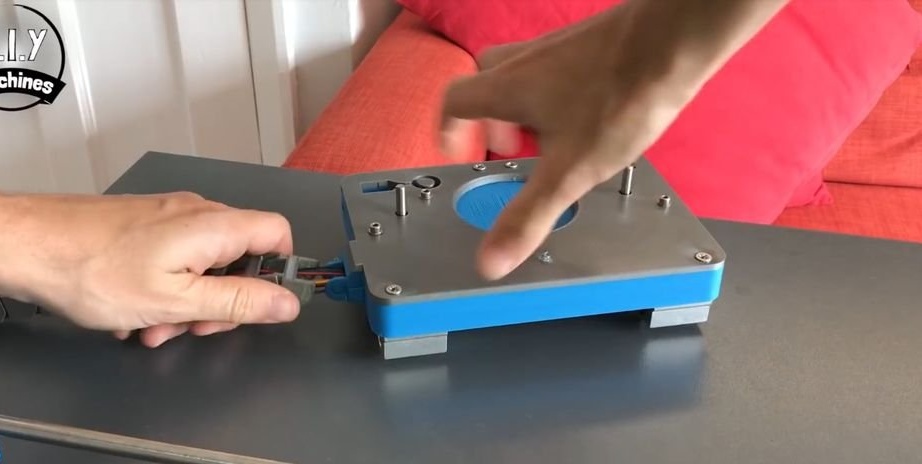
Trinn femten: Batterirom
Fjerner en genser på en modul. Kobler til batterirommet.
Nå kan du kjøre "test 1". Den røde lysdioden skal lyse opp, og plattformen skal nå begrensningsbryteren. Da blir lysdioden grønn.
Trinn seksten: flaskeholdere
Bruk av braketter sikrer bakveggen på MDF.




Flytter plattformen videre 1 cm fra endebryteren. Juster glassholderen og fester flaskeholderen med dispenseren (dessverre ga ikke master en beskrivelse for fremstilling eller kjøp av holderen). Neste. holdere festes hver 12. cm.



Trinn sytten: kode, kalibrering, test
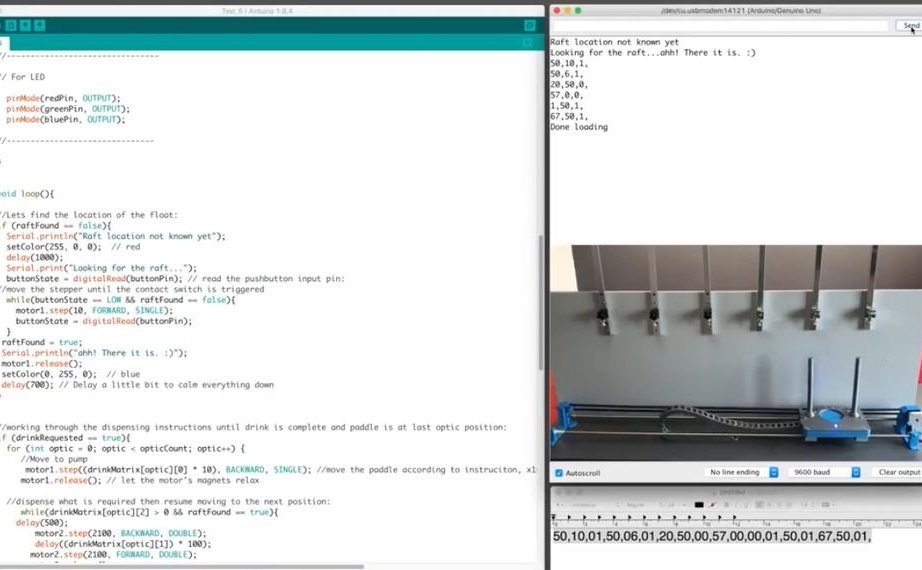
Laster hovedkoden kl https://www.thingiverse.com/thing:2478890
I innstillingen setter den følgende verdier: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. Mesteren har seks dispensere. I innstillingene er det seks grupper på tre, der det første sifferet er avstanden fra grensebryteren, den første dispenseren, den andre dispenseren, etc., det andre sifferet er tiden drikken ble hellet i glasset, den tredje er antall helle. Alle disse verdiene kan endres etter behov.


Den første drikken som enheten tilberedte var gin og cola. For å utjevne trykket i flasken med cola, må du lage et hull. Deretter angir veiviseren de nødvendige parametrene.



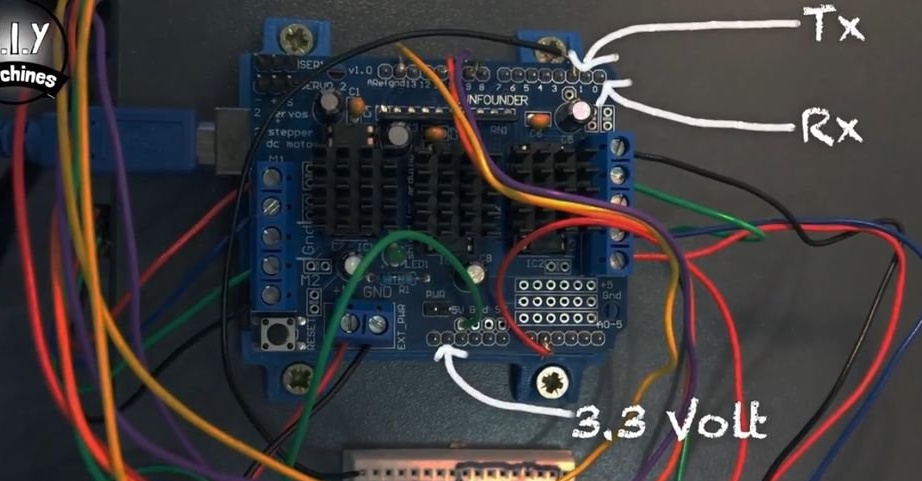
Trinn atten: Bluetooth-modul
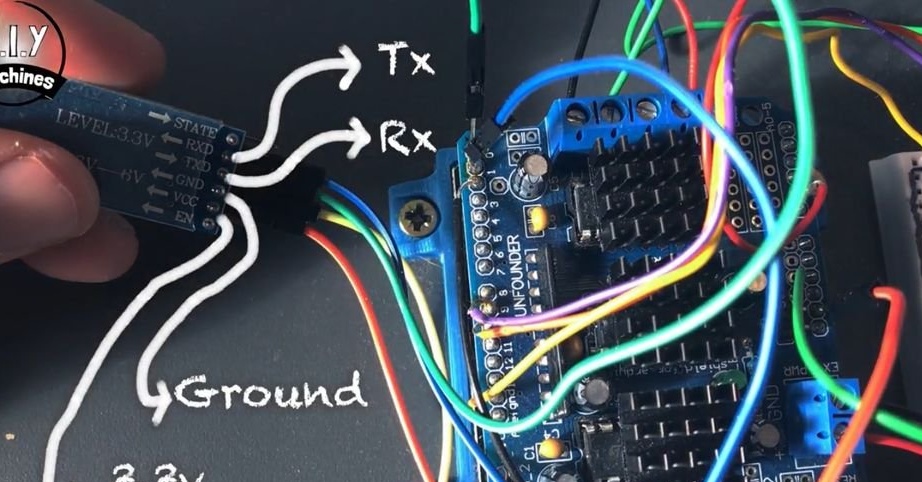
For å kontrollere bartender fra dingsen installerte masteren en Bluetooth-modul. Modulen kobles til som følger.
HM10 -> Arduino Shield
RXD ------> TX
TXD -------> RX
GND ------> Bakken
VCC ------> 3.3V

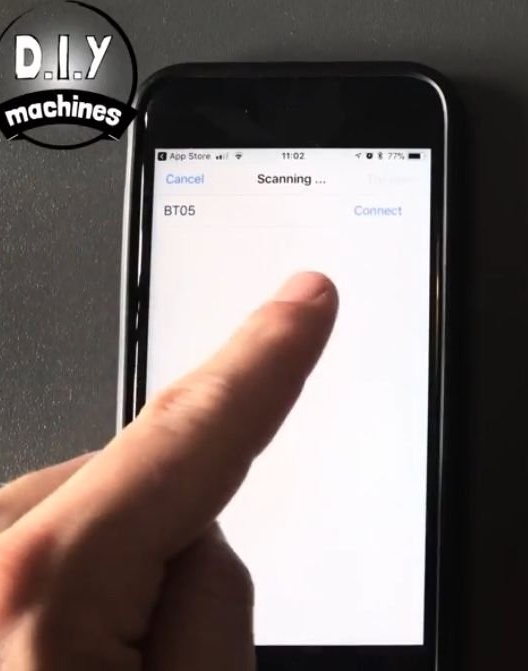
Mesteren har en smarttelefon som kjører iOS. For dette systemet laster han ned “hm10 bluetooth serial lite” fra applikasjonsbutikken. Deretter oppretter den tilkoblinger og går inn på innstillinger.

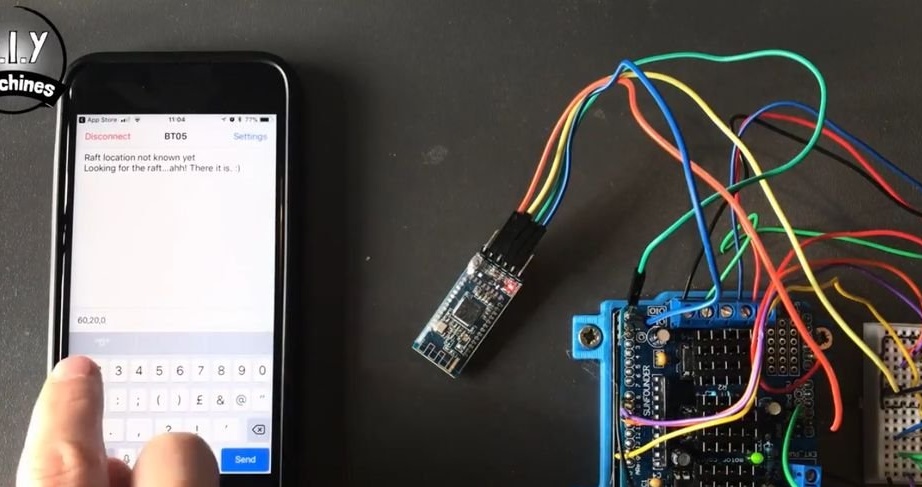
Alt er klart og for mer fullstendig informasjon noen få videoer.