
Jeg har nylig bygd dusinvis av roboter, mest inspirert av underverkene i BEAM-robotikk. Hvis du ikke er kjent med denne teknologien, er BEAM en spesiell metode for å konstruere roboter med vekt B - biologi, E - elektronikk (elektronikk), A-estetikk (estetikk) og M - mekanikk (mekanikk). Dette er forkortelsen BEAM. Det som skiller denne teknologien fra andre tilnærminger er bruken av strålingsenergi til ernæring (hovedsakelig solenergi), avhending av forskjellige materialer (gjenbruk) og minimalisme. Selv om jeg har adoptert disse prinsippene, mine egne roboter var ikke helt i ånden til BEAM (de ble drevet av et batteri).
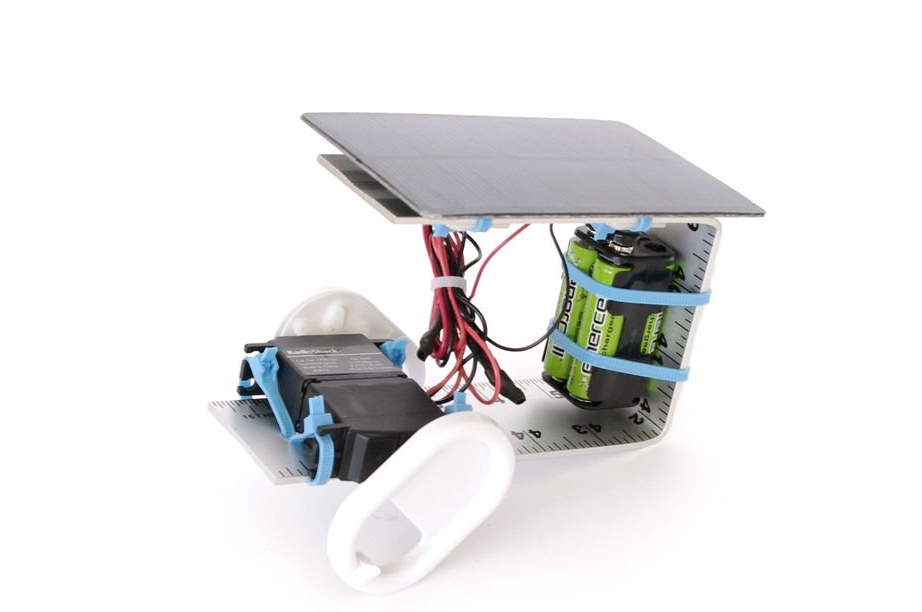
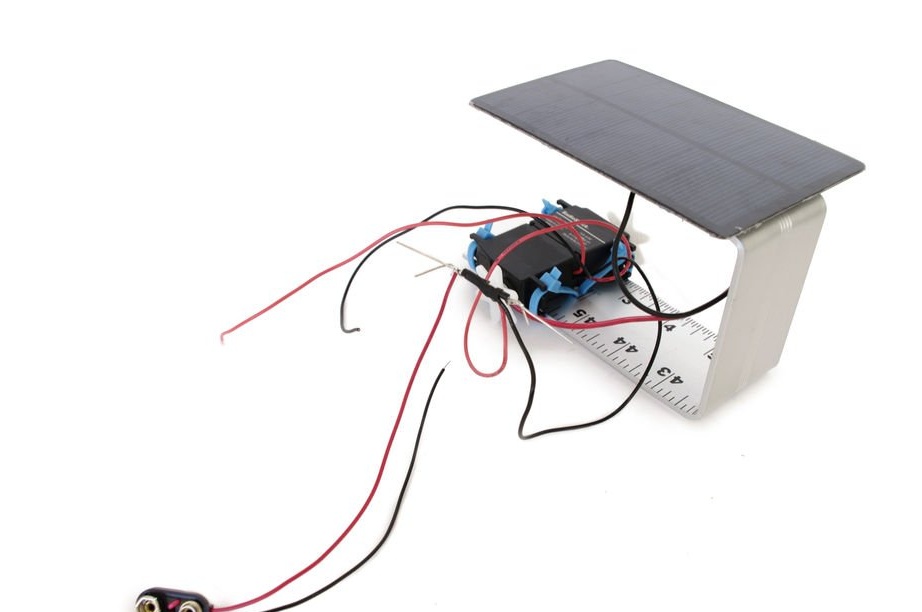
Siden BEAM-robotikk inspirerte meg seriøst, ønsket jeg å lage en solcelledrevet robot. Men i stedet for bare å lage en BEAM-robot, bestemte jeg meg for å integrere et solcellepanel i roboten i min vanlige stil. I stedet for fulldrevet av sola, bestemte jeg meg for å bygge inn oppladbare batterier. Det vil si at roboten min kan drives enten fra et batteri eller fra et solcellepanel, avhengig av hvilken strømkilde som for øyeblikket er kraftigere. Solcellepanelet lader også batteriene når sollyset treffer det. Dette gjør at roboten kan bevege seg både i lyset og i skyggen.
Jeg tror denne tilnærmingen lykkes med å kombinere to stiler, og dette er et interessant eksperiment i konstruksjon av roboter.
Trinn 1: Materialer
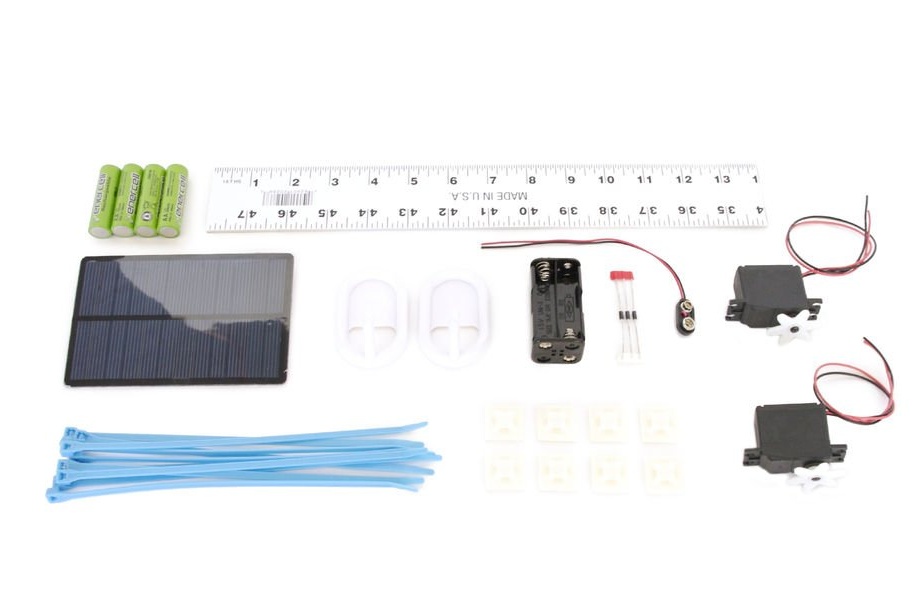
Du trenger:
(x1) Solcellepanel
(x2) Standard servomotorer
(x3) Schottky Diodes 1N5817 - NTE578 ekvivalent
(x1) 9V batteri
(x8) Oppladbare AA-batterier
(x1) 8 x AA-batteripakke
(x12) Sokkel for klemmer
(x1) Linjal (30 - 50 cm)
(x2) Veggmonterte limhaker
(x1) Plastklemmer
(x1) Heat Shrink Tubing
Trinn 2: Endre Servo

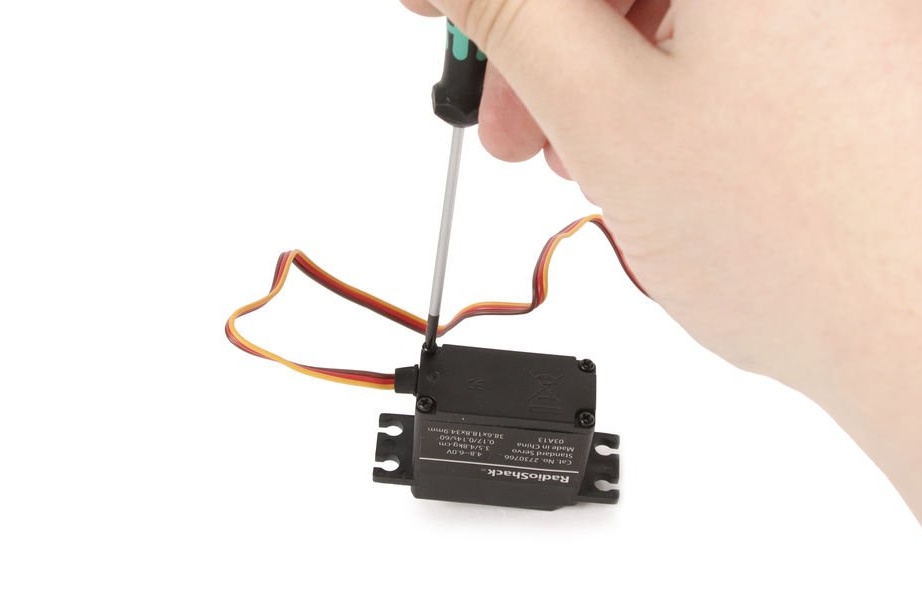
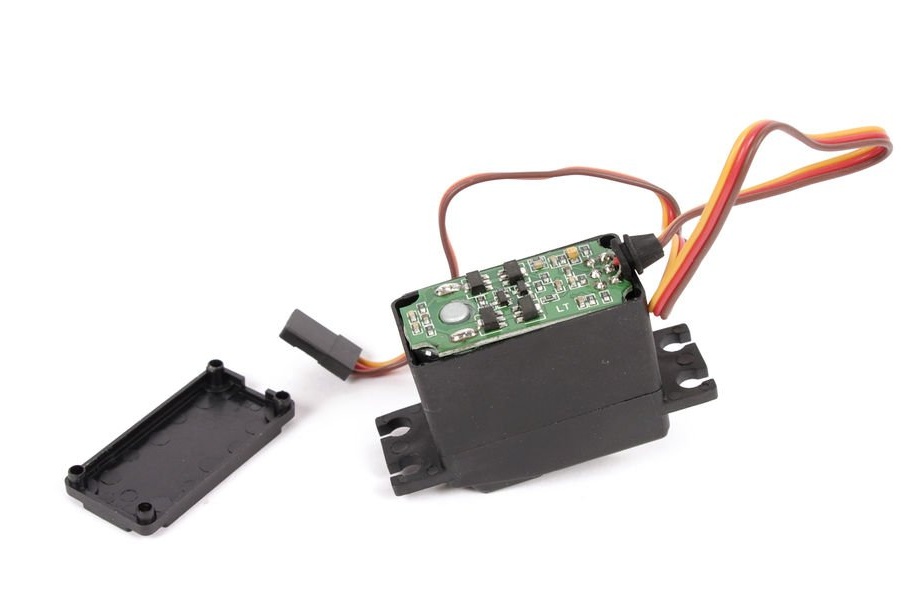
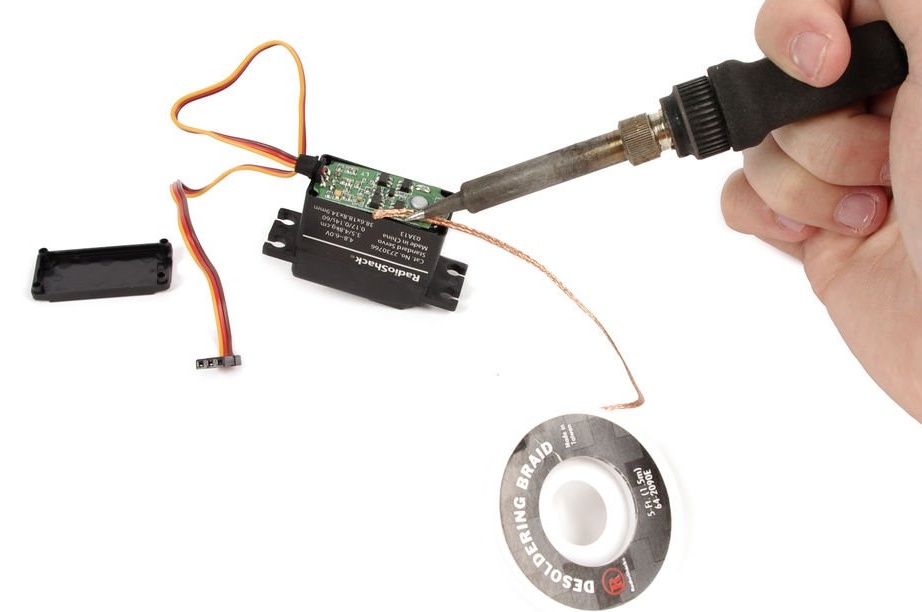
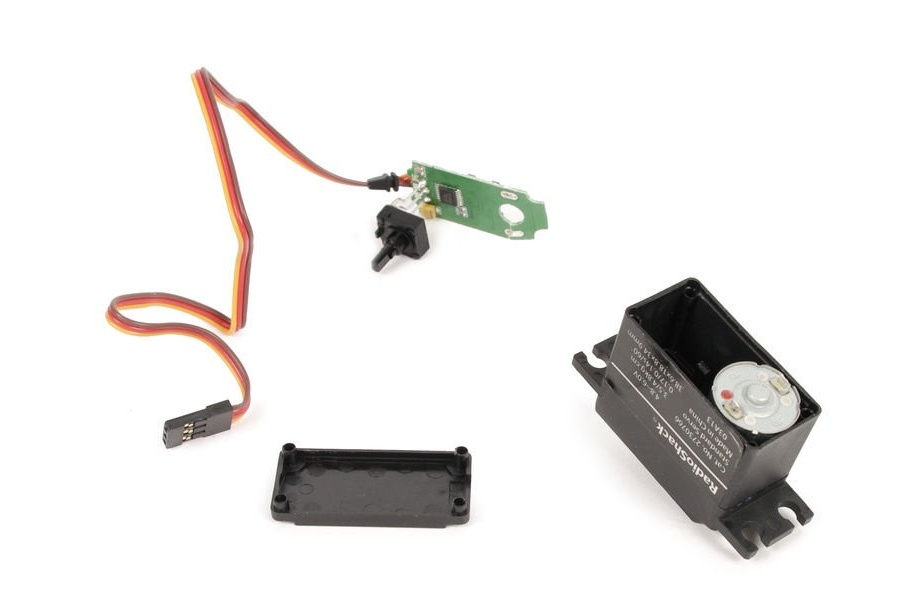




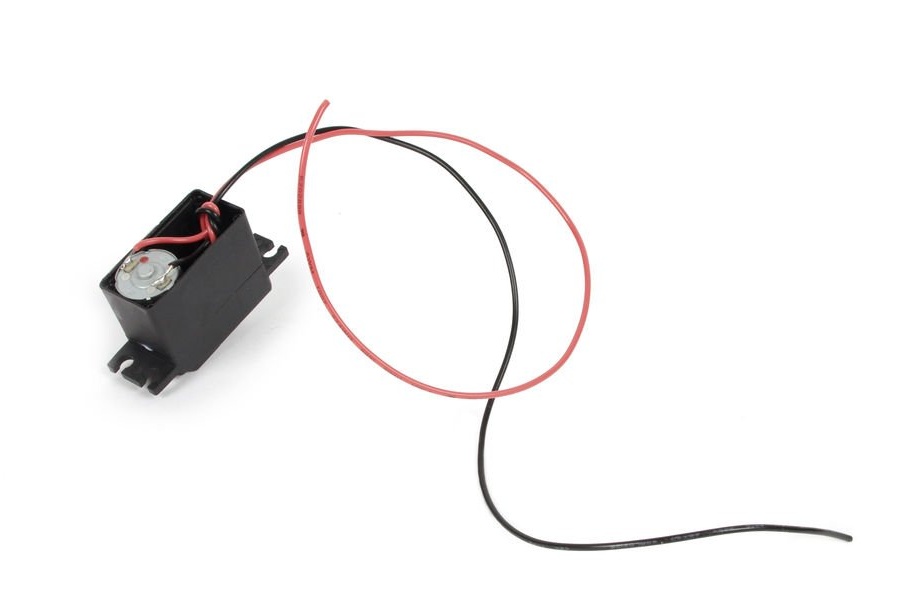
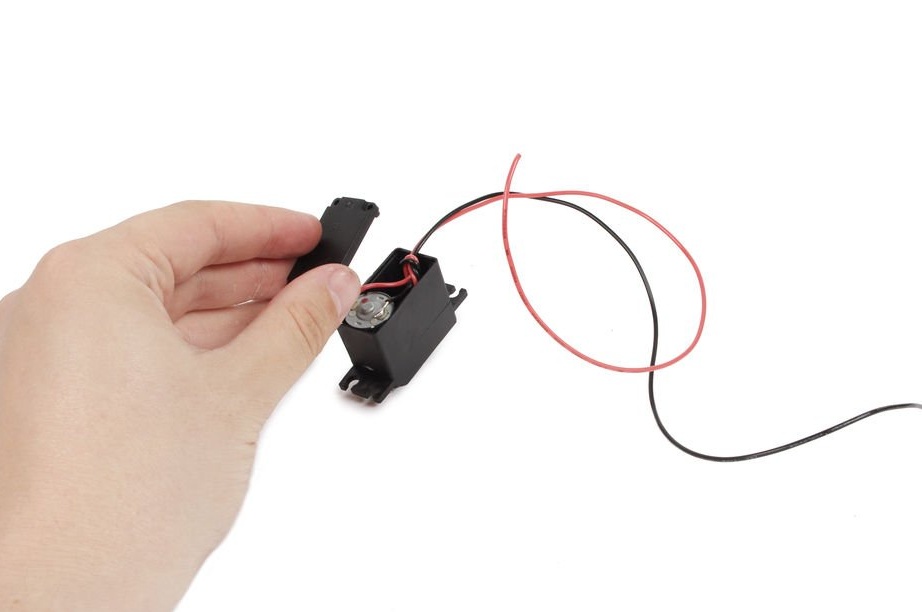

Åpne servohuset ved å skru ut 4 skruer på bunnpanelet. Pakk ut brettet inni og koble de røde og svarte ledningene til hver terminal på stasjonen.
Åpne girstasjonen og finn giret med en liten plastlokk som forhindrer kontinuerlig rotasjon. Klipp av hetten fra giret.
Trinn 3: Bor
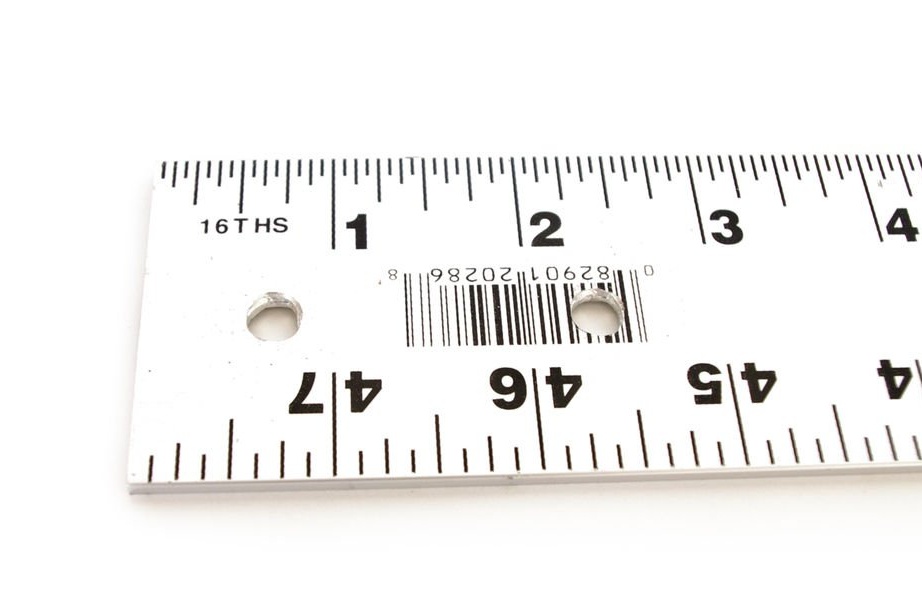


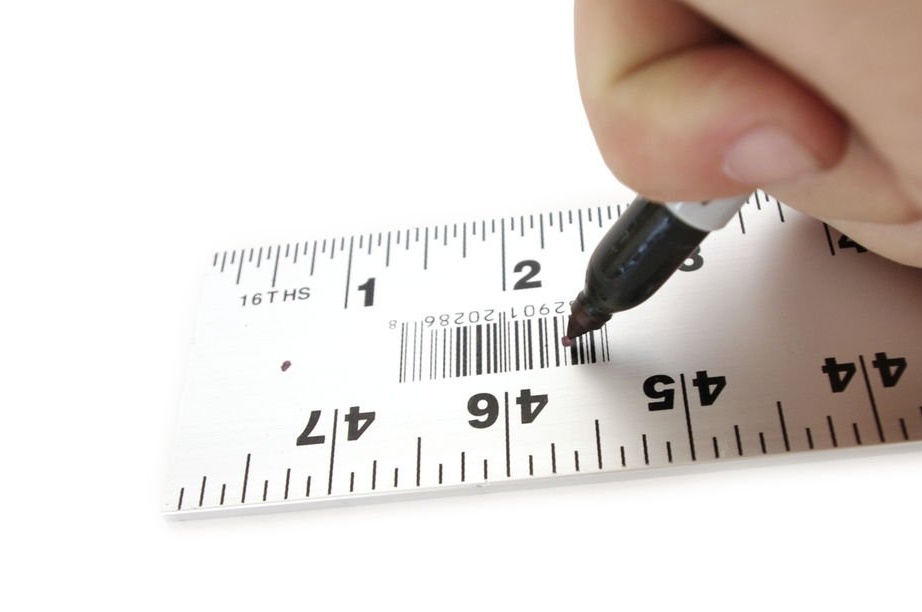
Bor et 6,3 mm stort hull i midten av linjalen, omtrent 15 mm fra kortsiden. Bor et andre hull omtrent 60 mm fra samme kant.
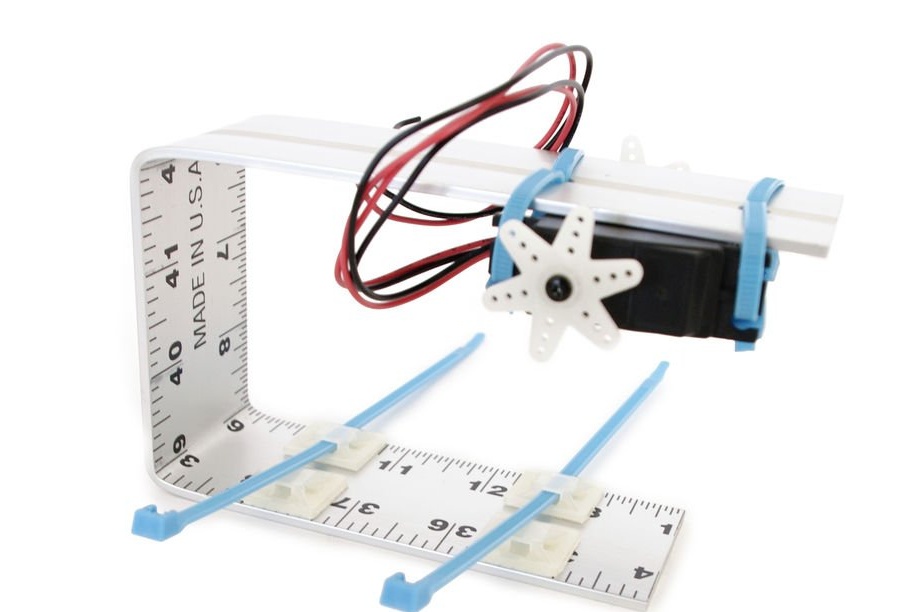
Trinn 4: Bøy

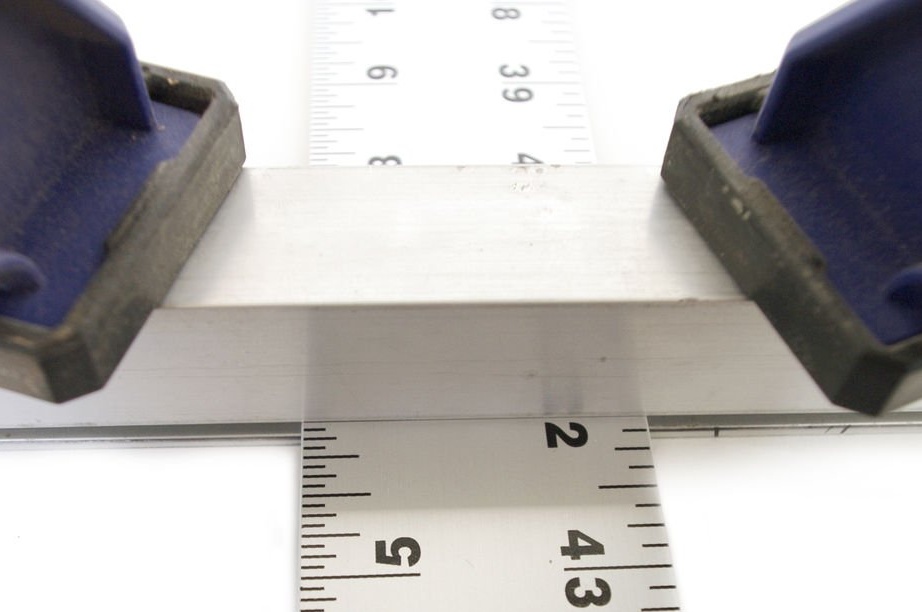
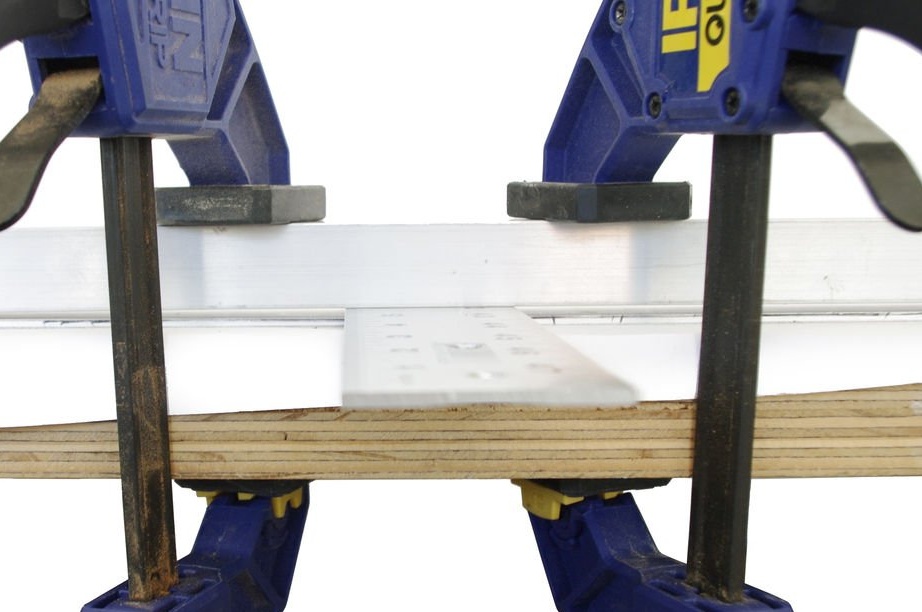

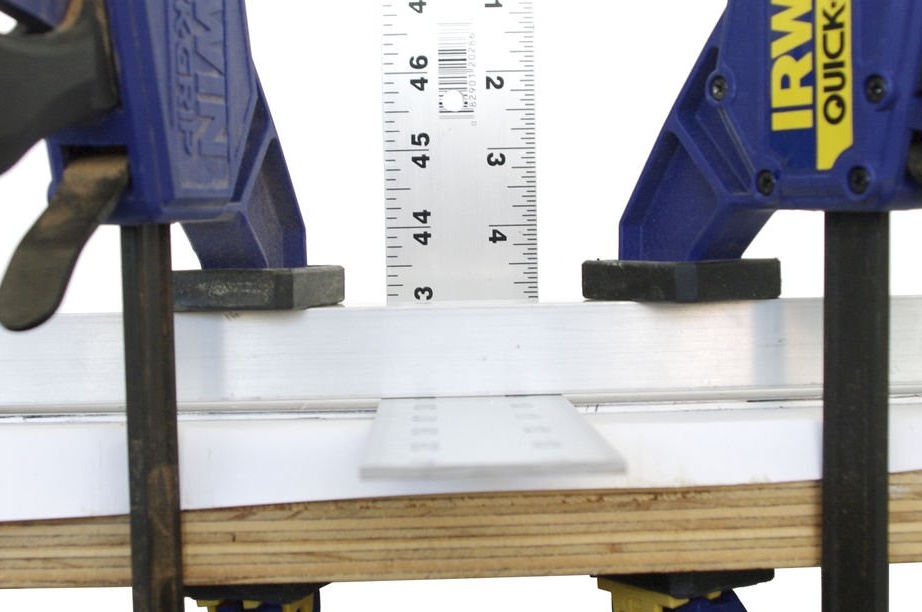

Ved å bruke en skrustikke eller to metallplater klemt på kanten av bordet, bøy linjalen i en vinkel på 90 grader i en avstand på 15 cm fra kanten der hullene ble boret i.
Gjør den samme svingen i en vinkel på 90 grader i en avstand på 15 cm fra den andre kanten. Du vil få en figur i form av bokstaven P.
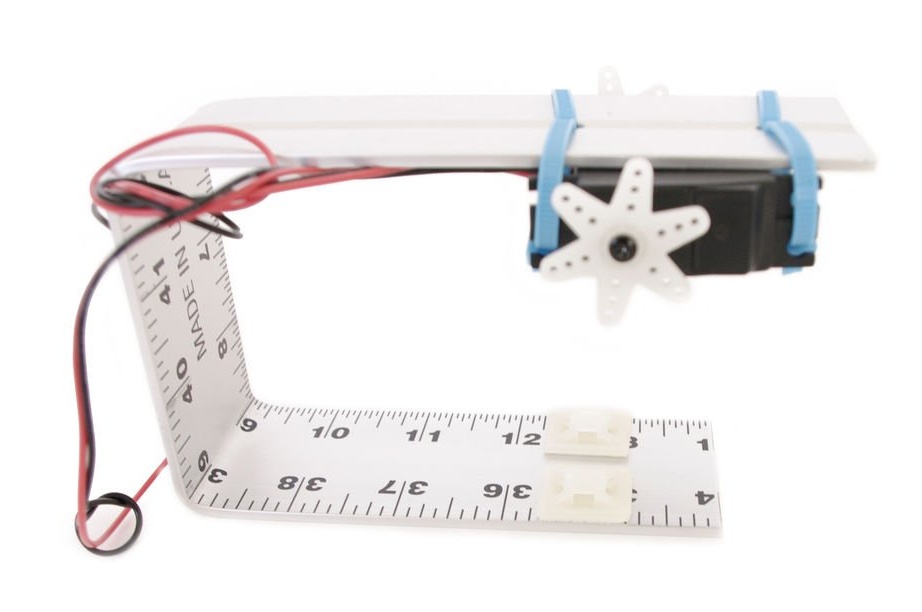
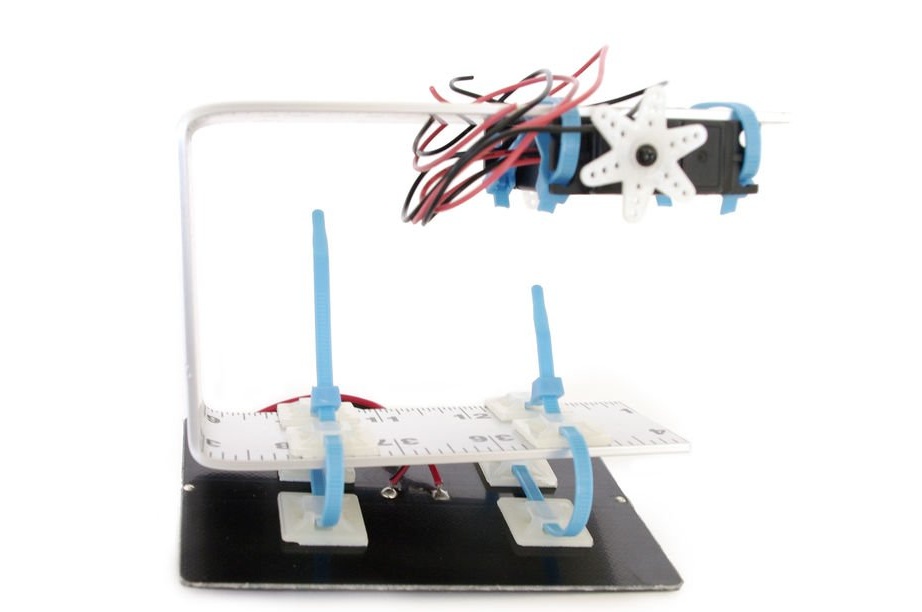
Trinn 5: Tilkobling
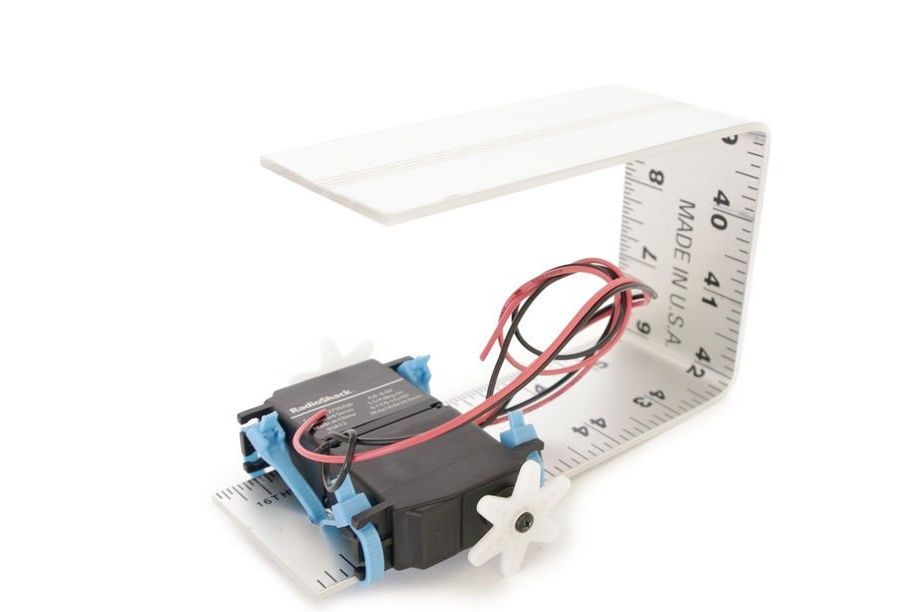

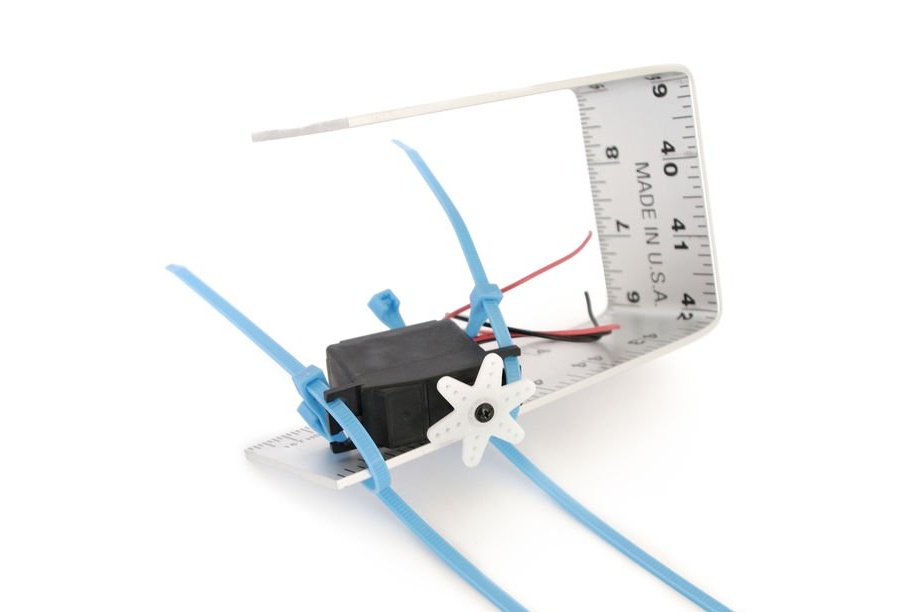
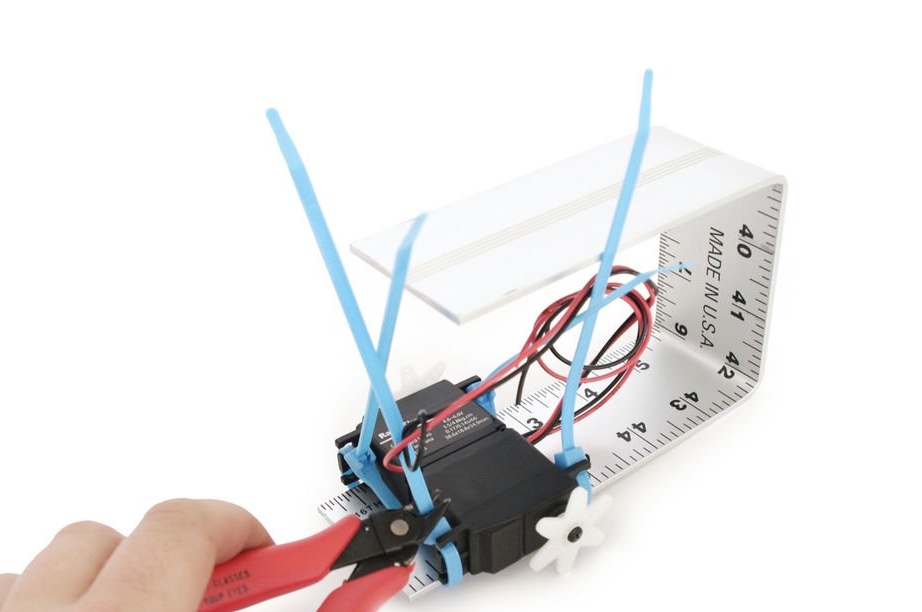
Det er nødvendig å fikse servoer på linjen med plastklemmer, gjennom borede hull. Servomotorer må sitte med ryggen til hverandre.
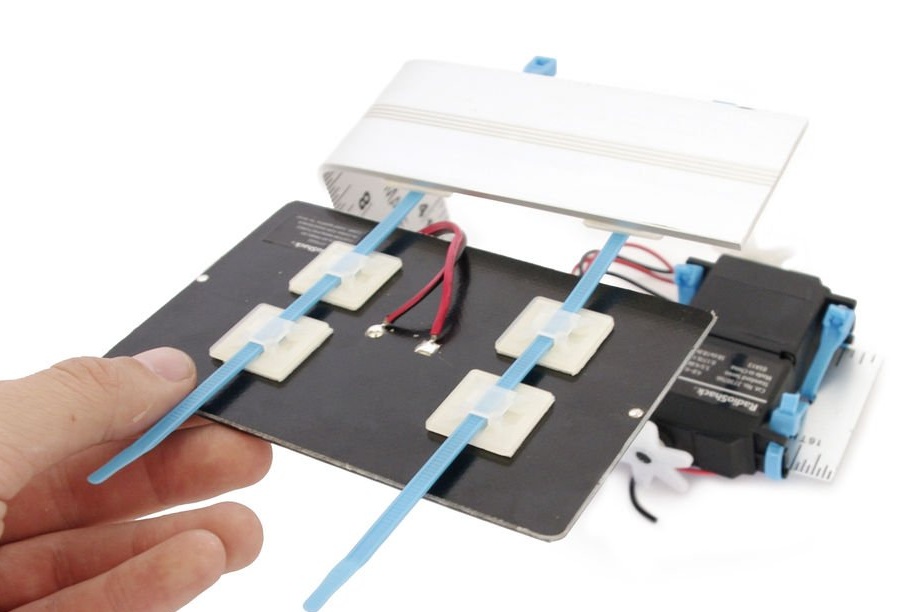
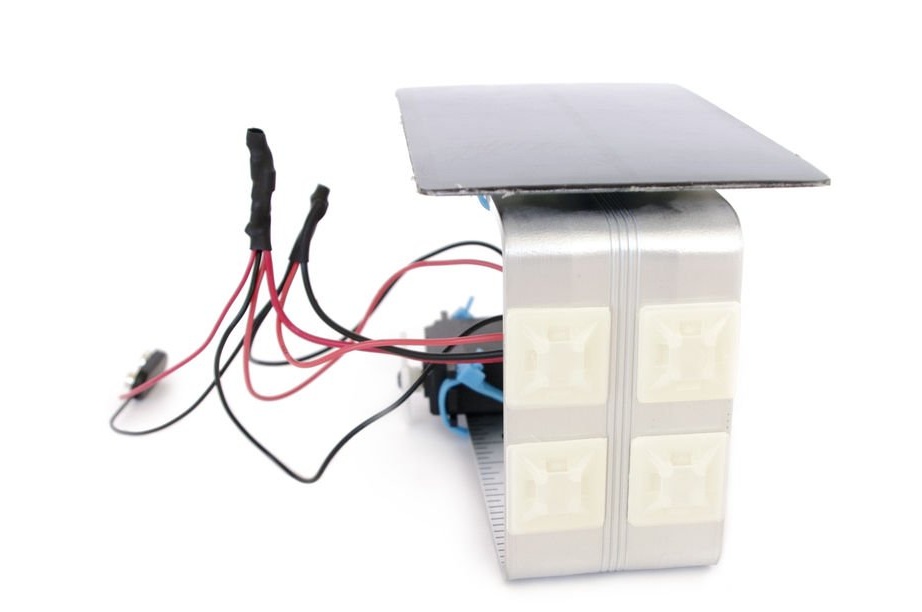
Trinn 6: Sokkel for klemmer
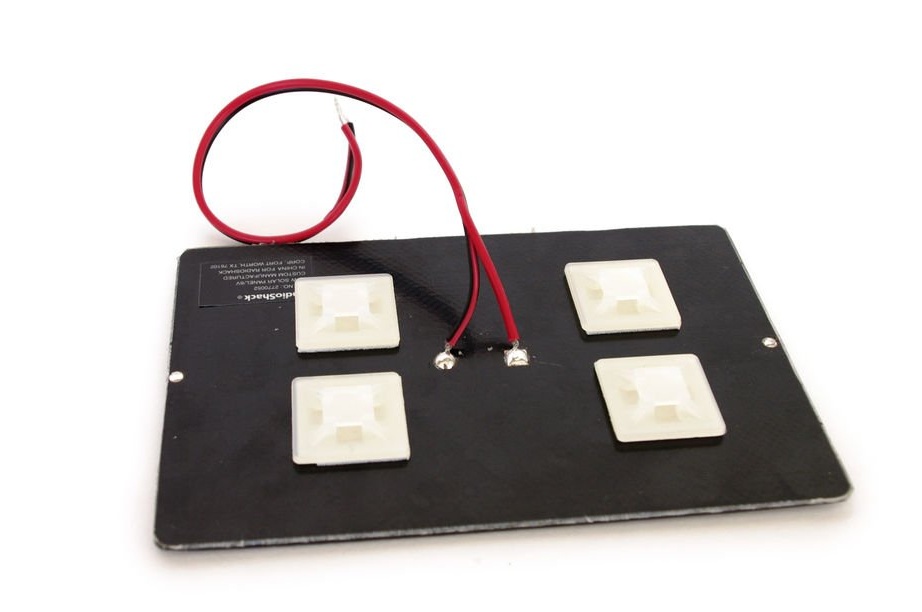

Plasser to par klemmebaser ved siden av hverandre på baksiden av solcellepanelet. Det er viktig at kanalene til hvert par er på samme linje.
Trinn 7: Flere grunner
Fest ytterligere to baser på innsiden av U-stangen, på siden overfor servoene.
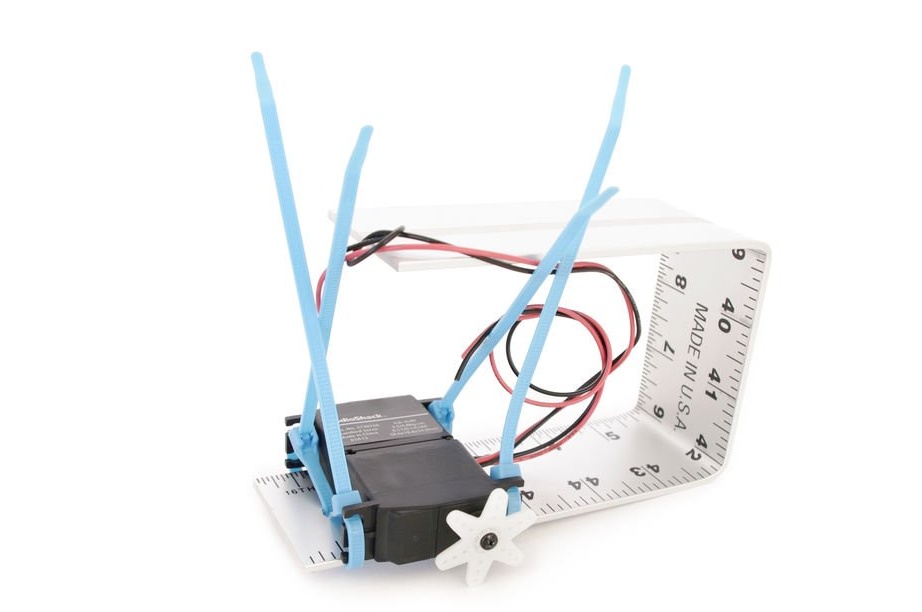
Trinn 8: Tilkobling
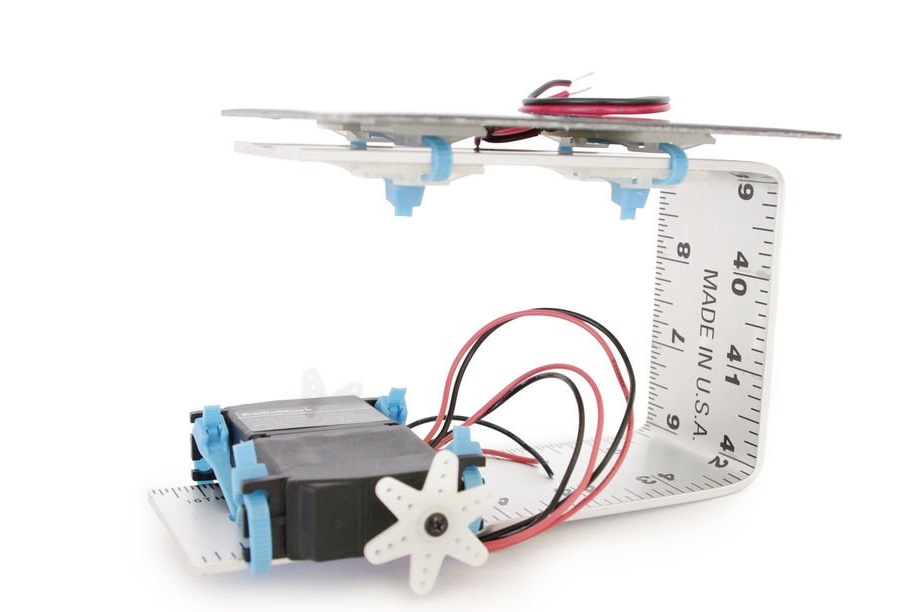
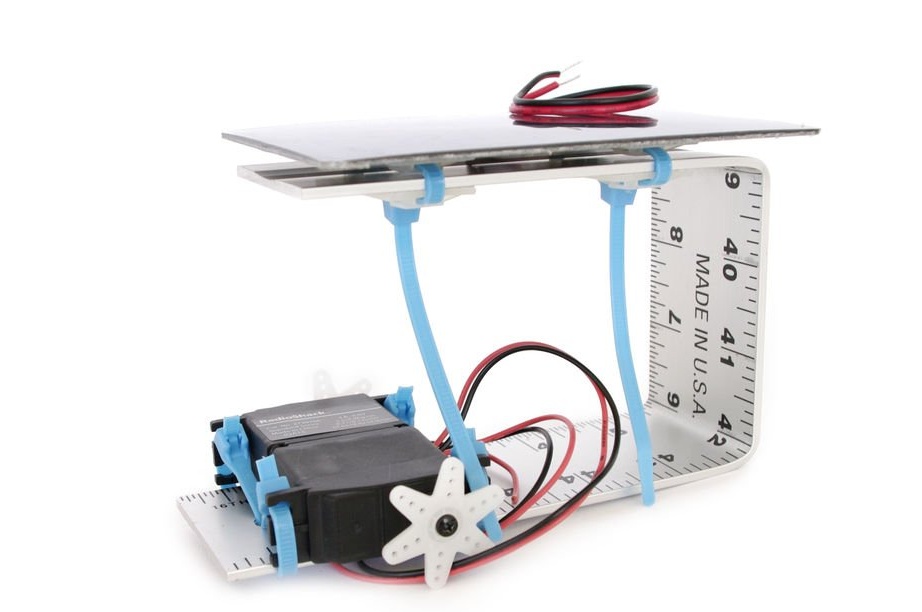
Fest solcellepanelet med klemmer gjennom faste baser.
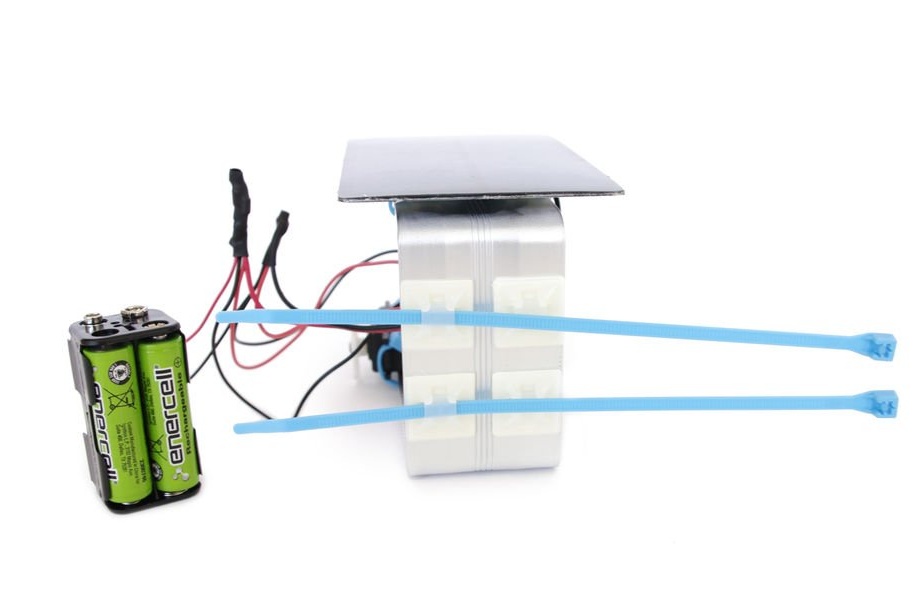
Trinn 9: Sett inn batteriene


Sett batteriene i batteripakken.
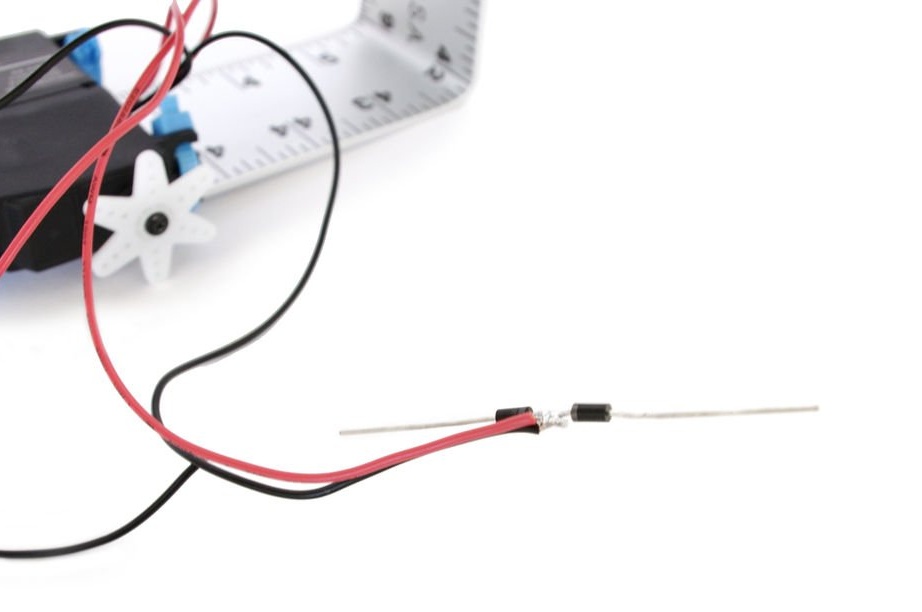
Trinn 10: Dioder

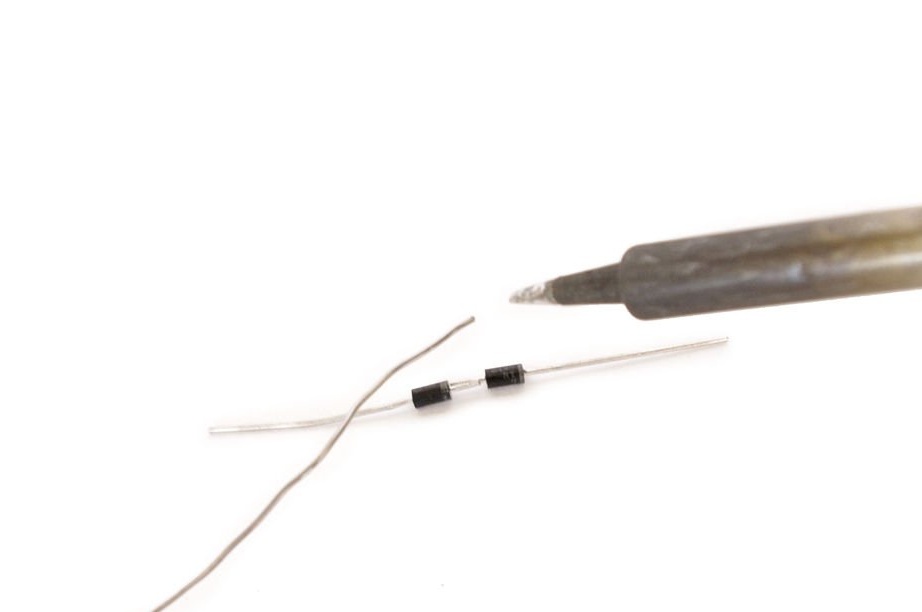
Lodd de to diodene sammen med katodene (siden av dioden med sporet).
Trinn 11: kjedemontasje
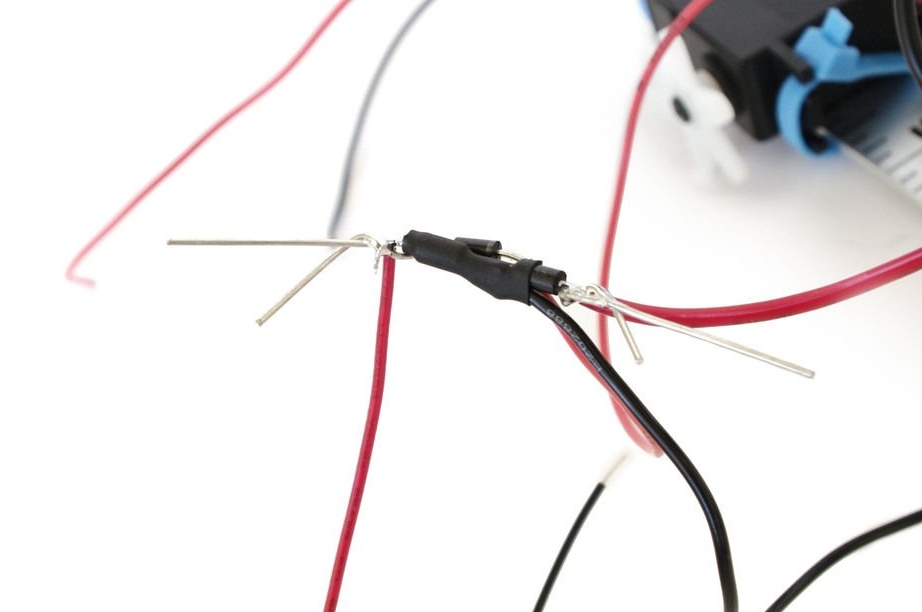
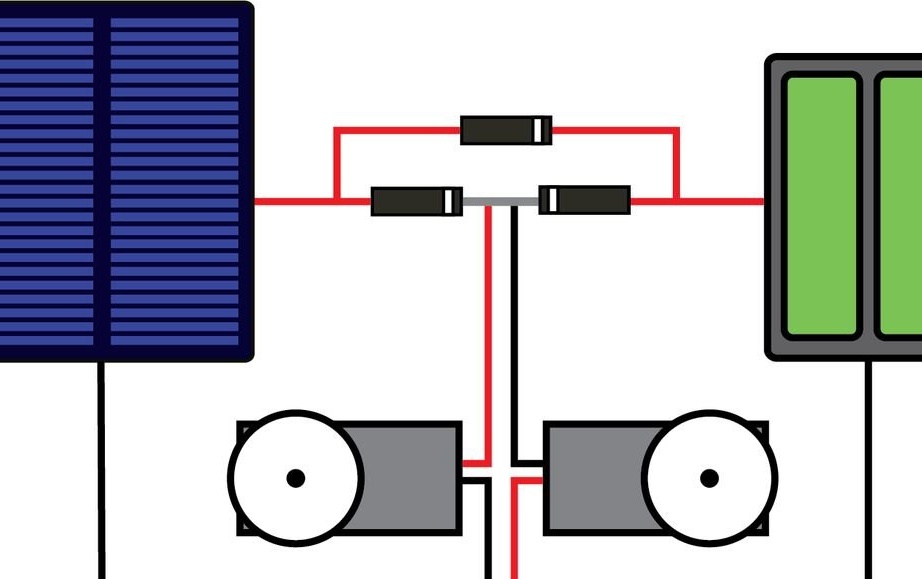
Kretsen for denne roboten er basert på David Cooks enkle solladekrets. Kretsen inneholder to Schottky-dioder koblet til en katode-til-katode, en diode koblet til et solcellepanel og ett av batteriene. Denne konfigurasjonen lar deg få strøm fra både batterier og solcellepanel, avhengig av forholdene.
Siden batteriene er oppladbare, kobles en tredje Schottky-diode direkte fra solcellepanelet til batterirommet for å lade batteriene fra solen.
For å koble det til, kobler du den røde ledningen fra den ene servoen og den svarte ledningen fra den andre til midtpunktet for katodeforbindelsen.
Deretter kobler du den røde ledningen fra batteriterminalen til anoden til en av Schottky-diodene. Koble den røde ledningen fra solcellepanelet til anoden på en annen diode.
Lodd nå anoden til den tredje dioden til den røde ledningen som er koblet til solcellepanelet, og katoden til den røde ledningen fra batteriterminalen.
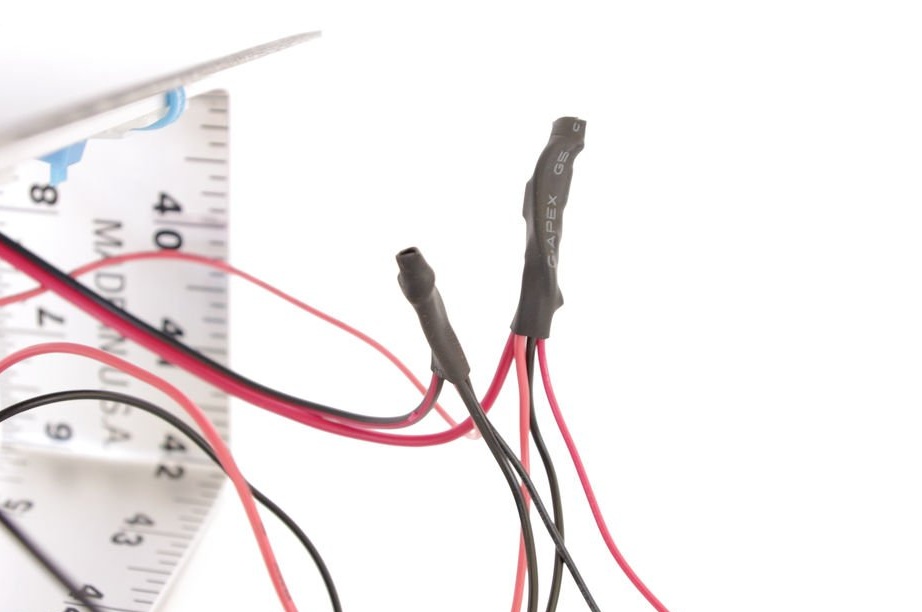
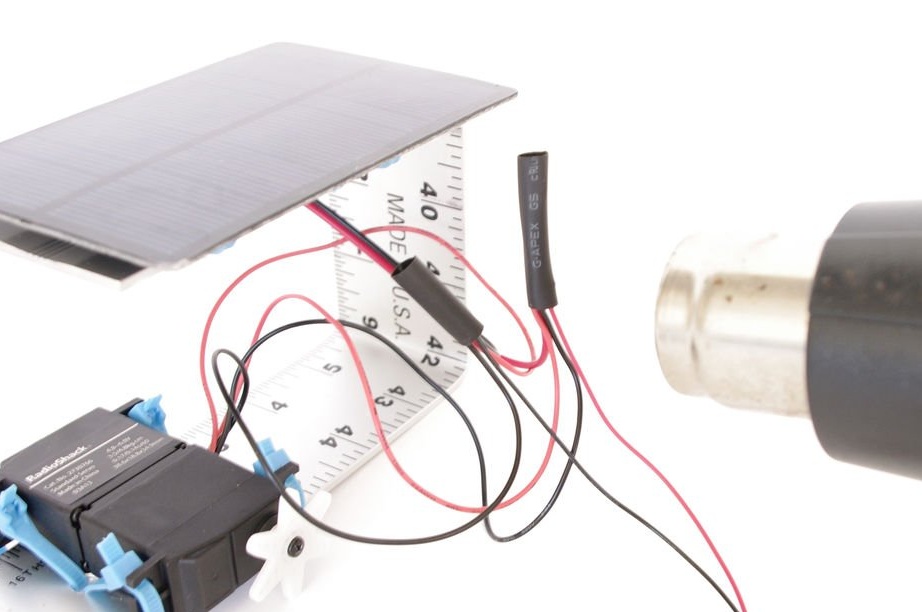
Pakk inn alle ledninger med varmekrympeslange for å beskytte kretsen mot kortslutning.
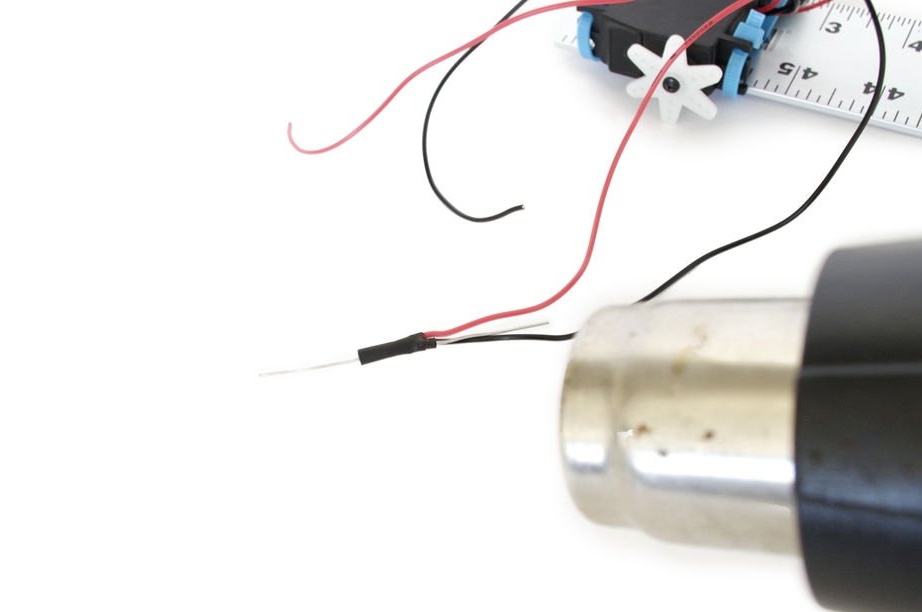
Trinn 12: Noen flere ledninger
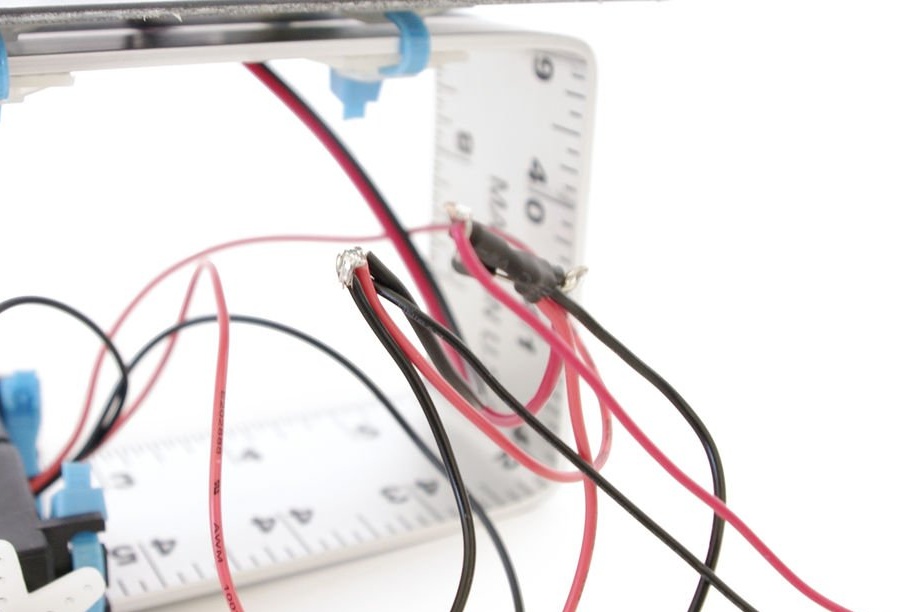
Lodd sammen alle svarte ledninger og de resterende gratis røde ledningene fra servoene.
Få to loddede skjøter; en for kraft, og en for jording. Pakk begge disse skjøtene med varmekrympeslange eller elektrisk tape.
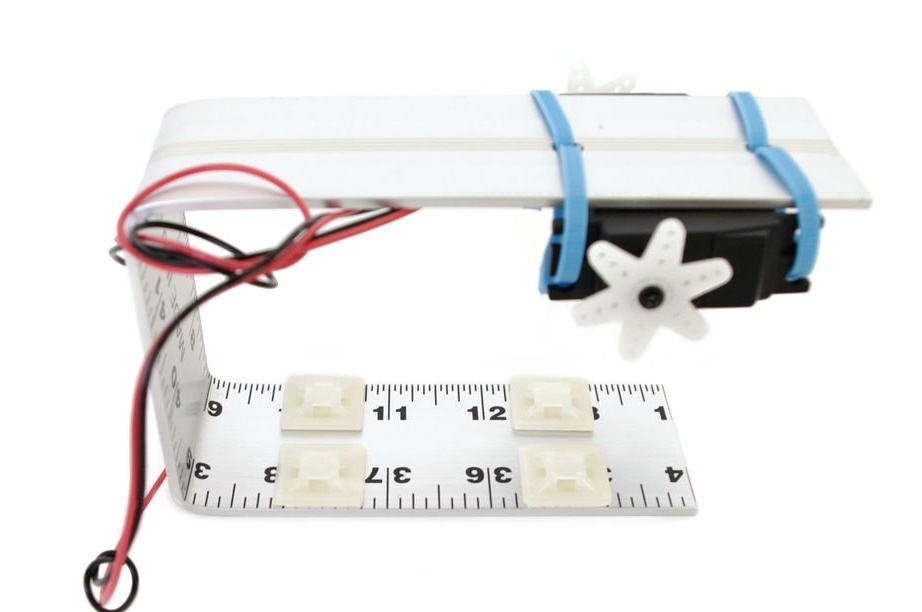
Trinn 13: Og noen flere grunner til klemmene
Fest to par baser på undersiden av den U-formede buede linjalen.
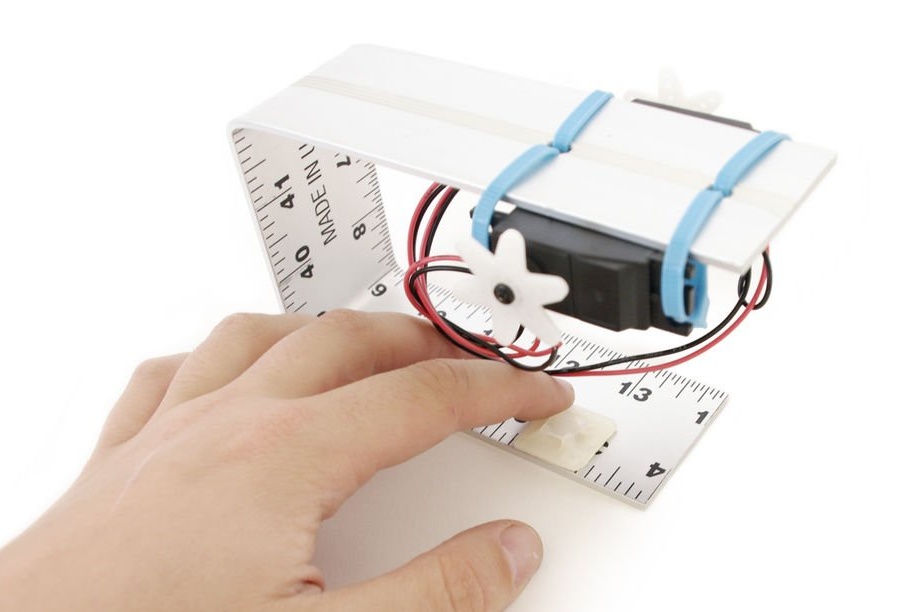
Trinn 14: Sikre batteriene
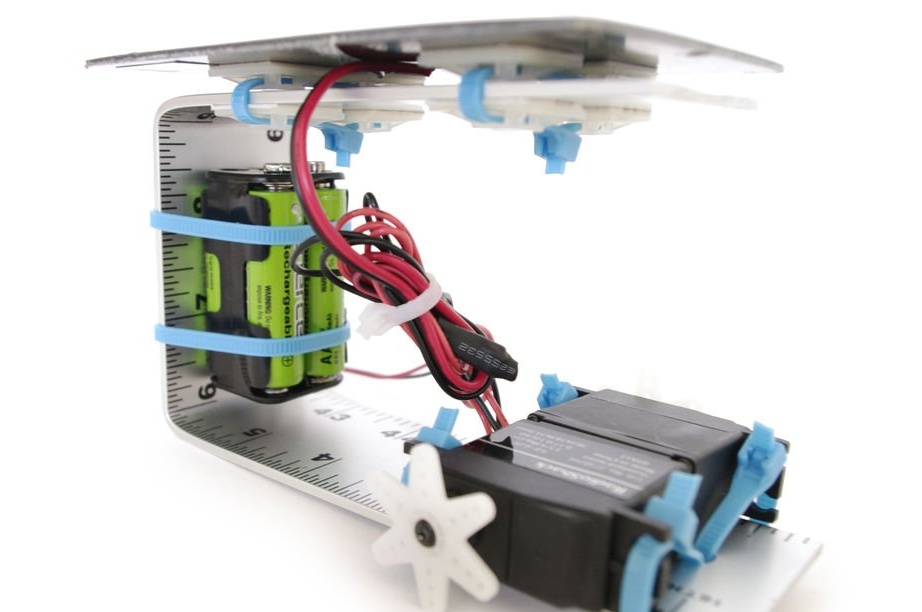
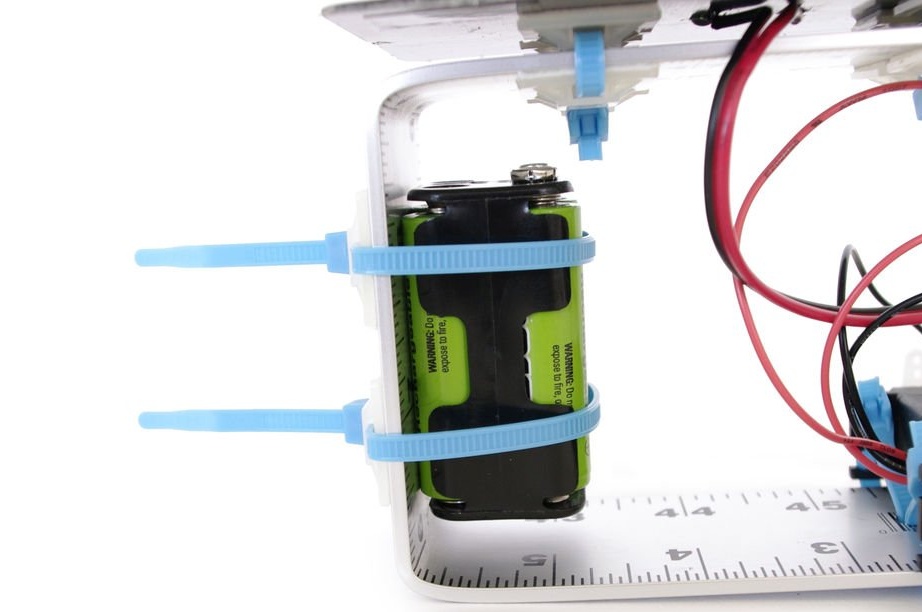
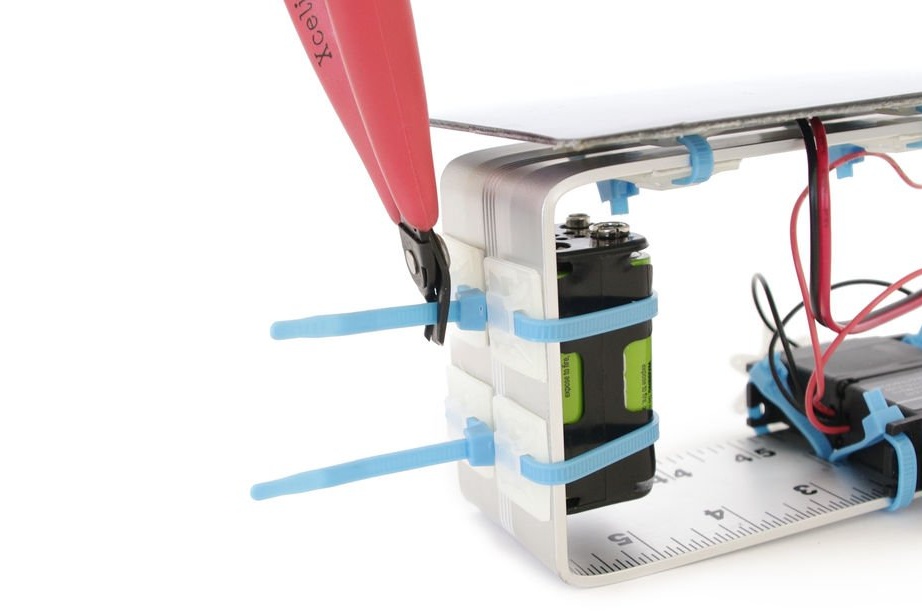
Sikre batteriene med klemmer inni den U-formede linjalen, slik at de sitter fast og ubevegelig på plass.
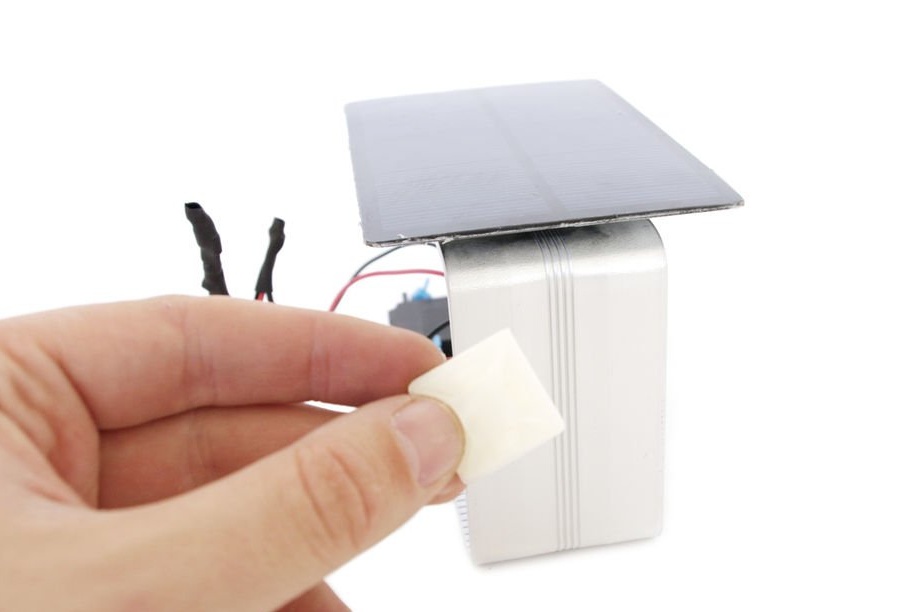
Trinn 15: Trimming


Klipp krokene på plastveggfesterne.
Trinn 16: Hjul
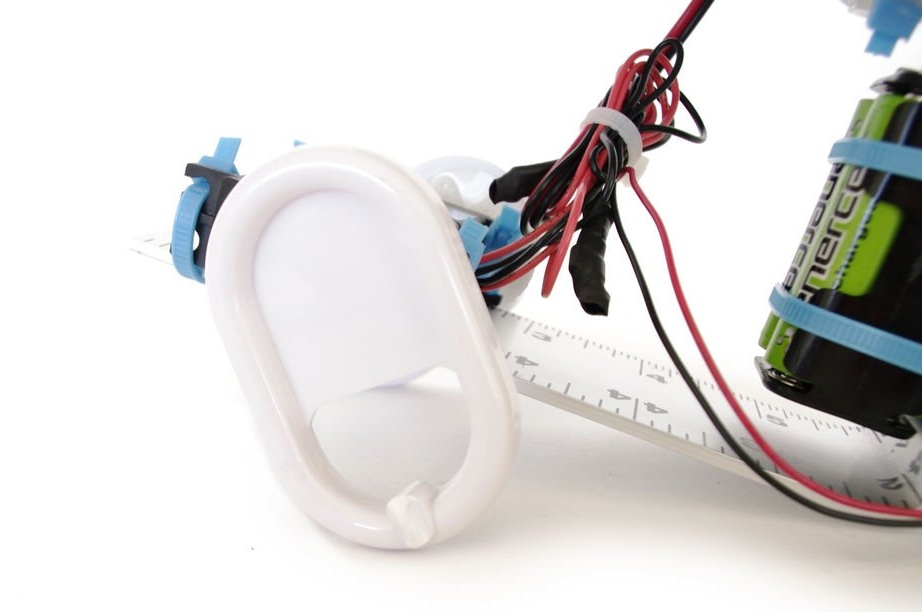
Lim veggfestene på de ytre girene til servoen (dette vil være noe som hjul).
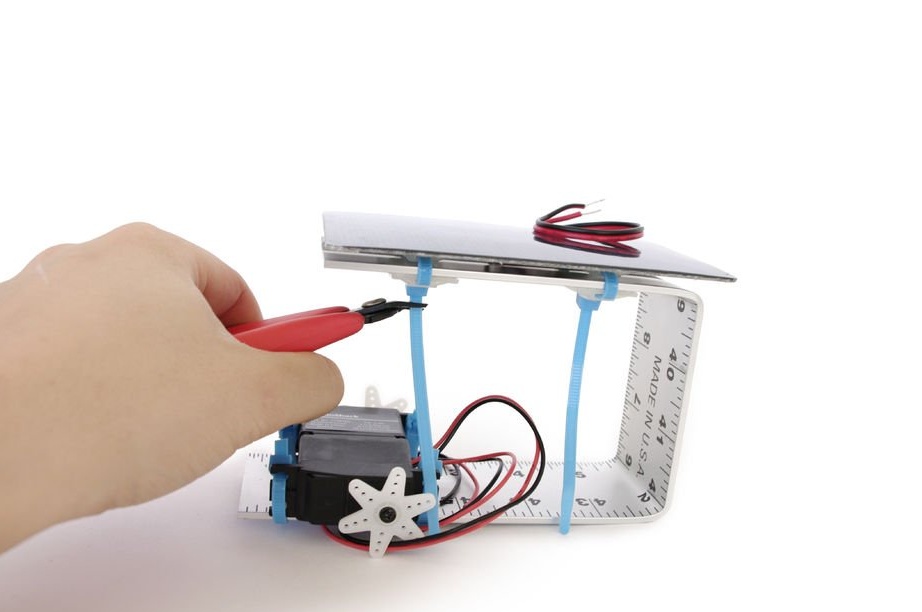
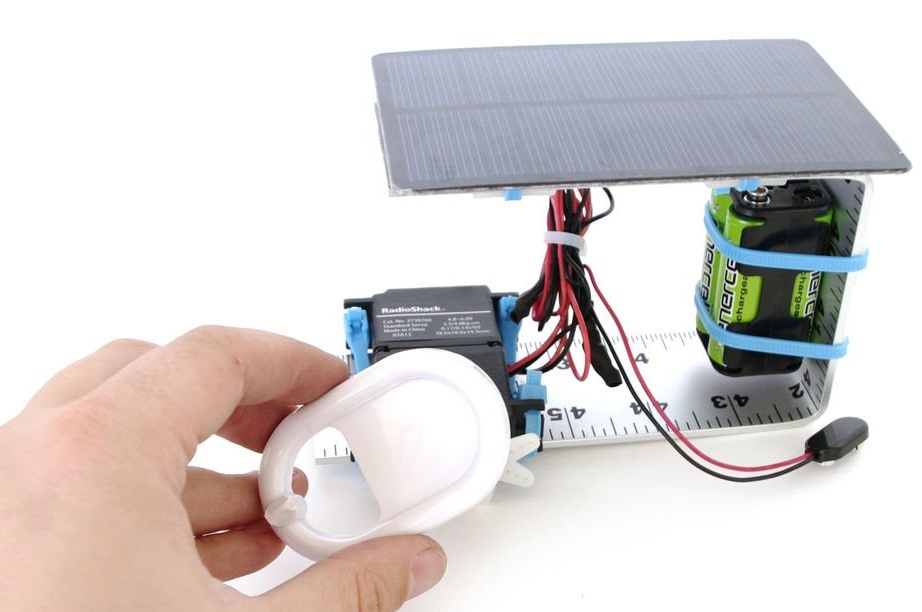
Trinn 17: Slå på!

Koble ledningen til batteripakken og roboten begynner å bevege seg.