
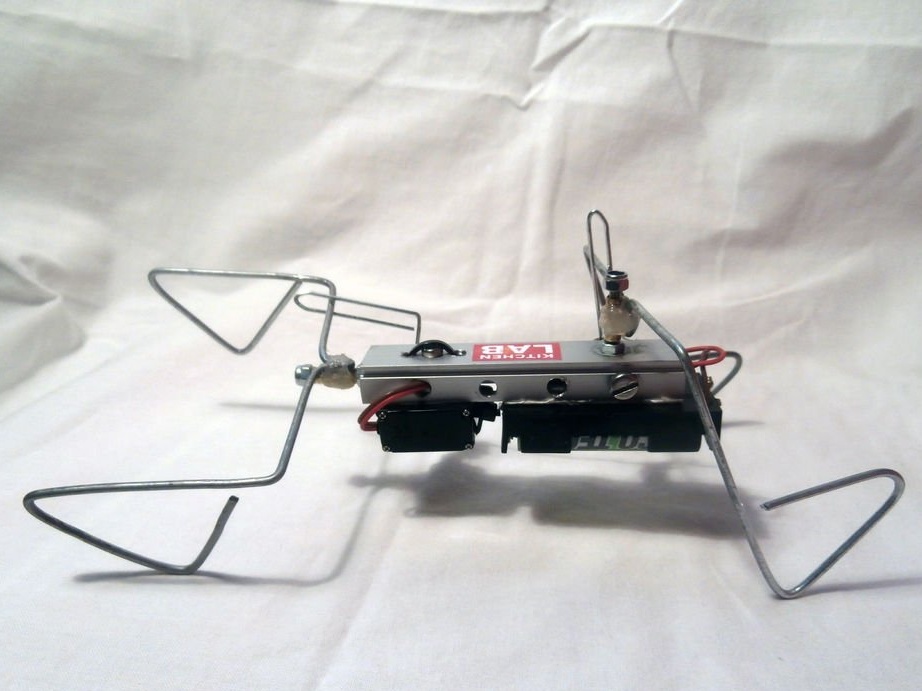
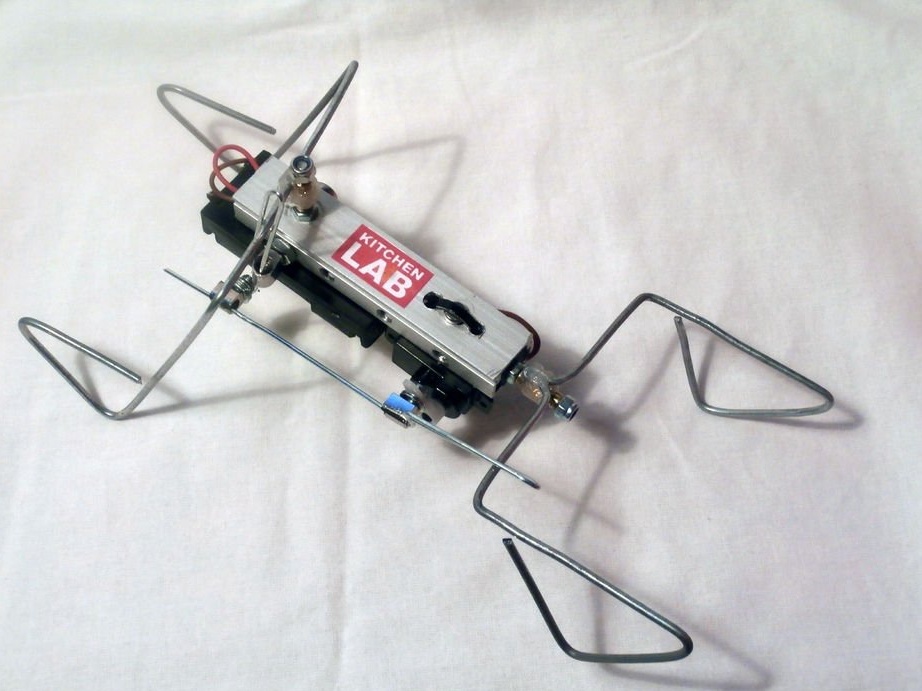
Hei alle sammen! Jeg ble inspirert til å lage BEAM-roboten min, etter å ha sett nok av disse enkelmotor- og tvillingmotorens underverk innen robotikk på Internett. Tanken var å lage en vandrende robot, gå på samme måte som 1- eller 2-motorers BEAM-turgåere. Etter flere mislykkede eksperimenter, gjorde jeg det jeg ville!
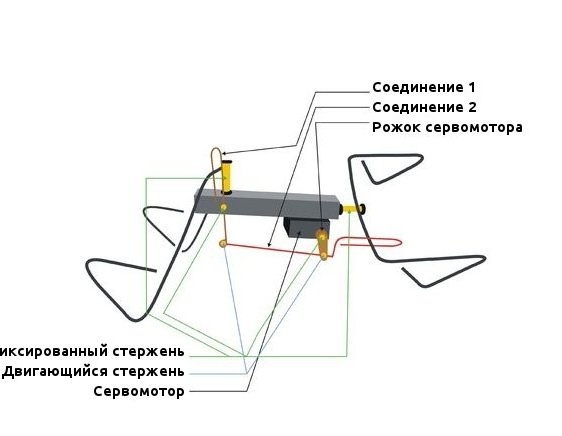
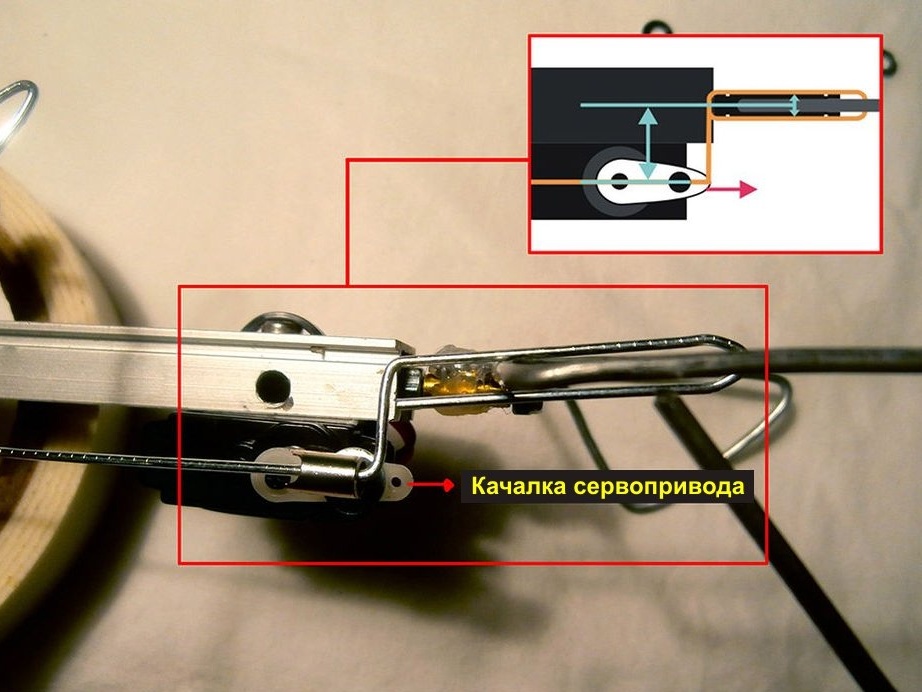
Trinn 1: Mekanismen
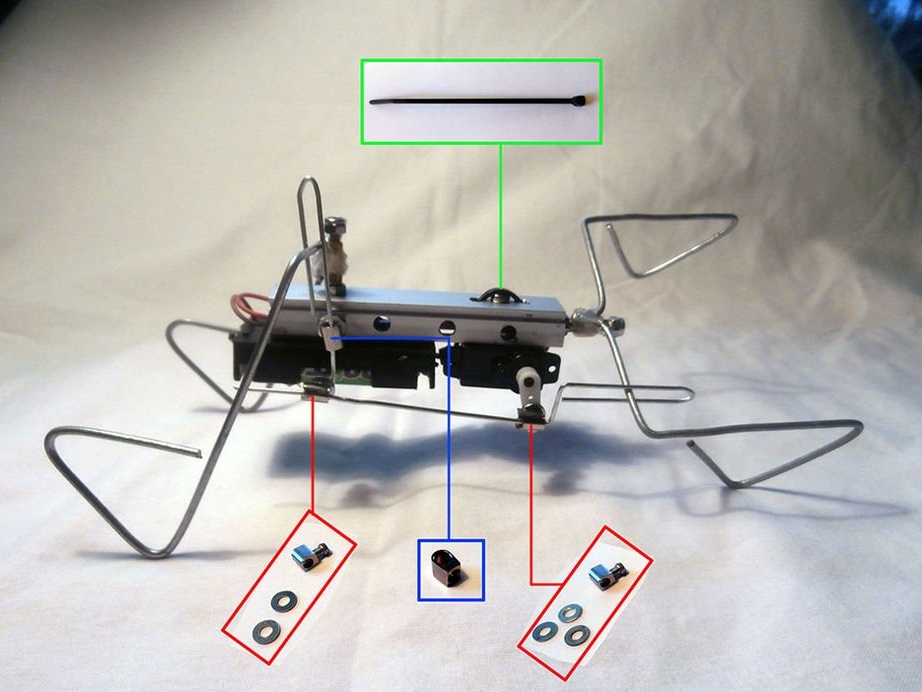
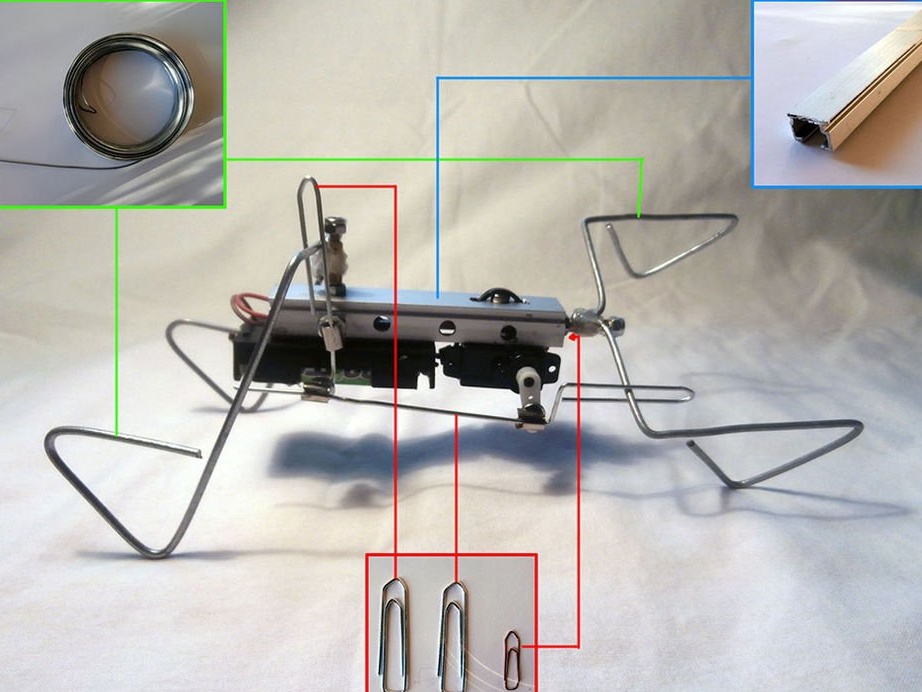
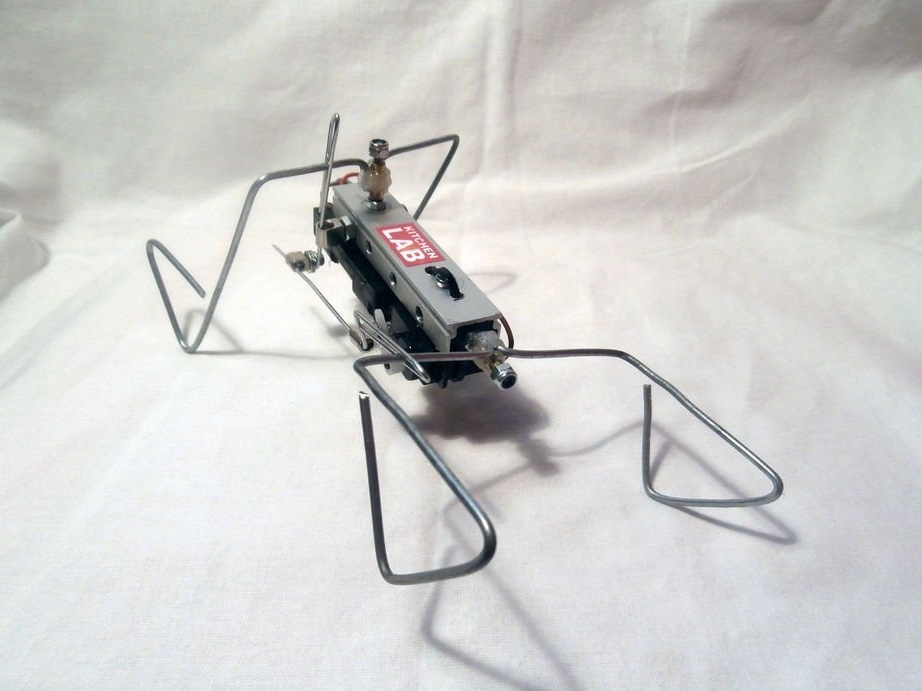
Trinn 2: Nødvendige deler

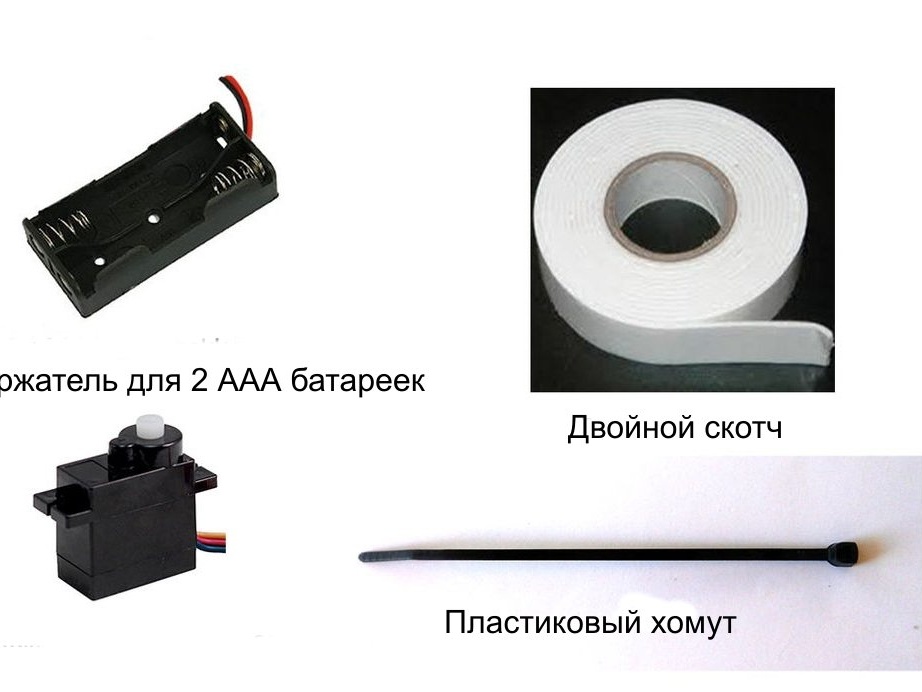



(1x) kontinuerlig rotasjonsservo
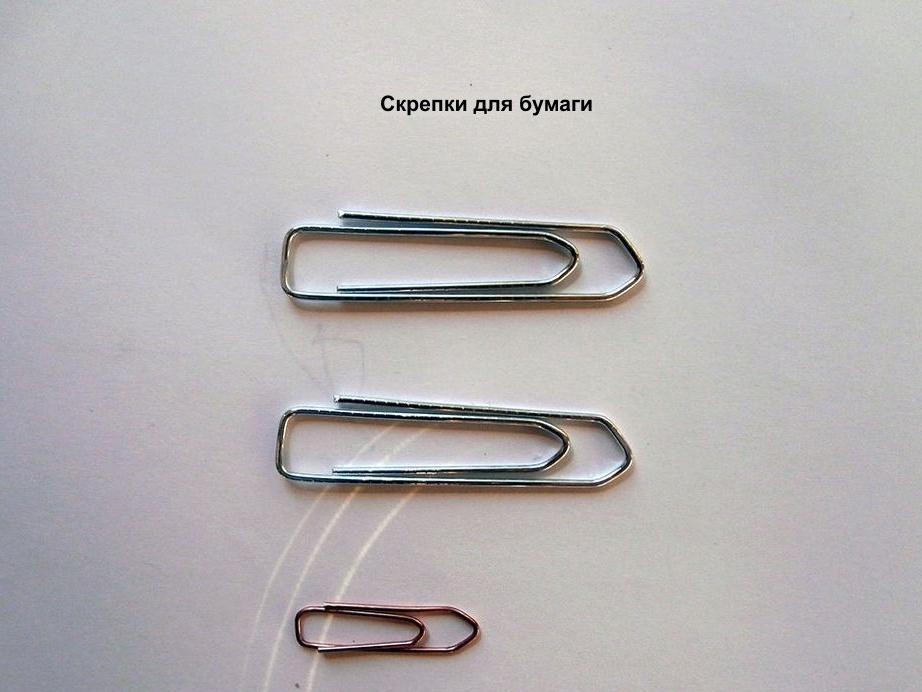
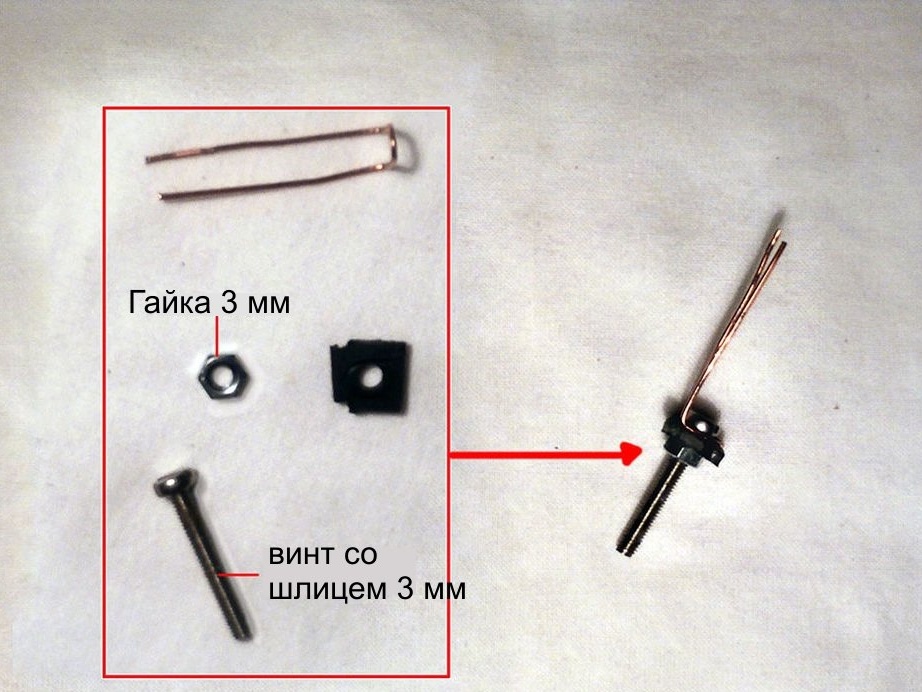
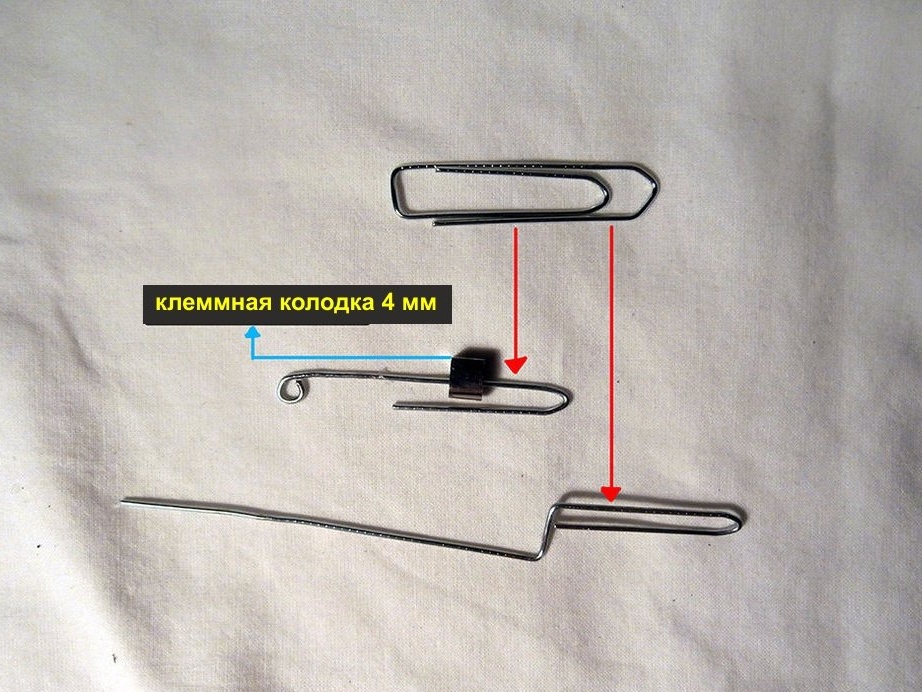
(2x) store binders
(1x) liten binders
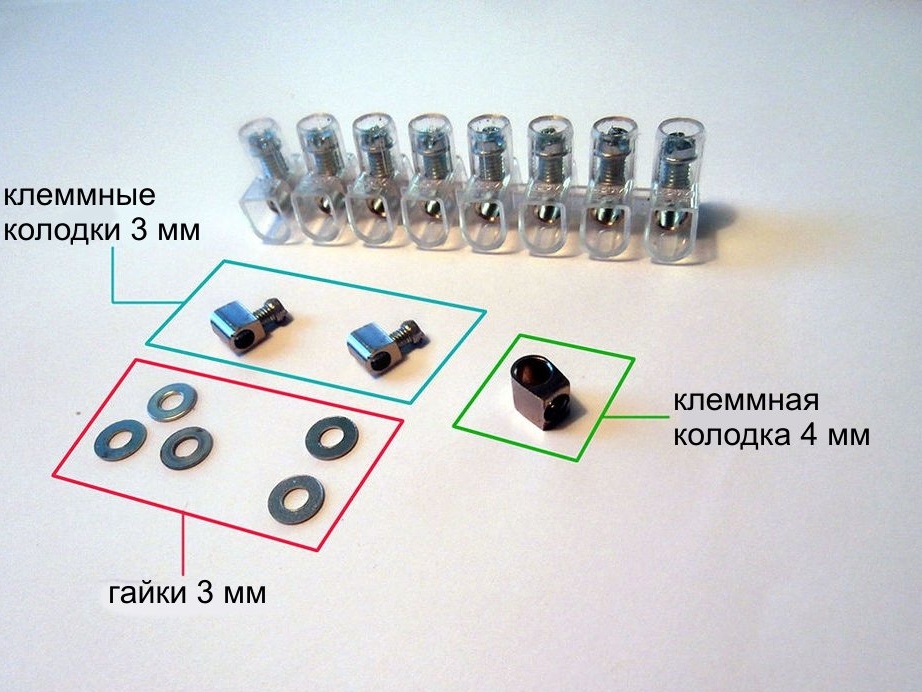
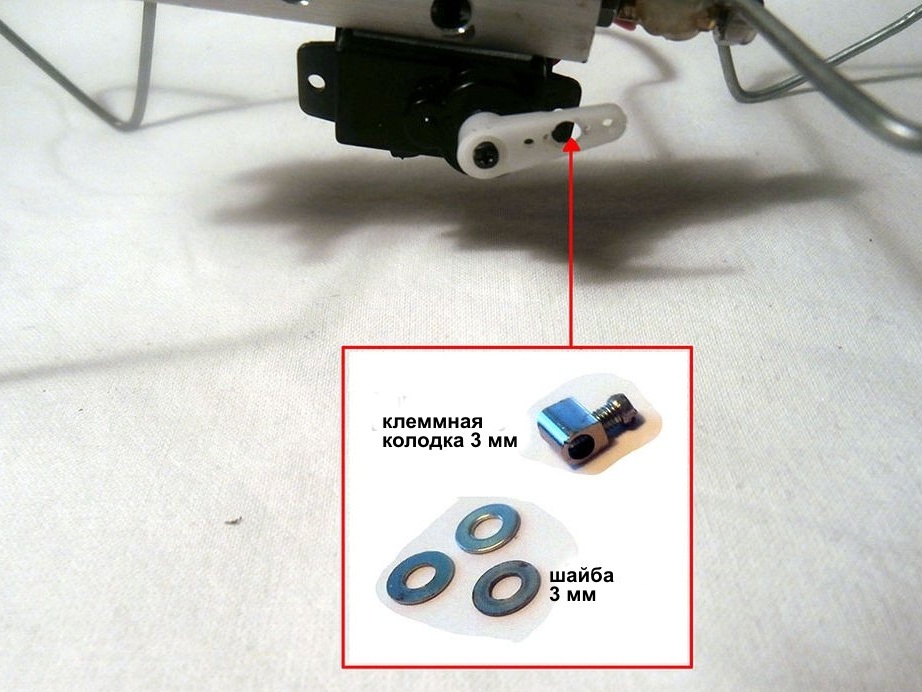
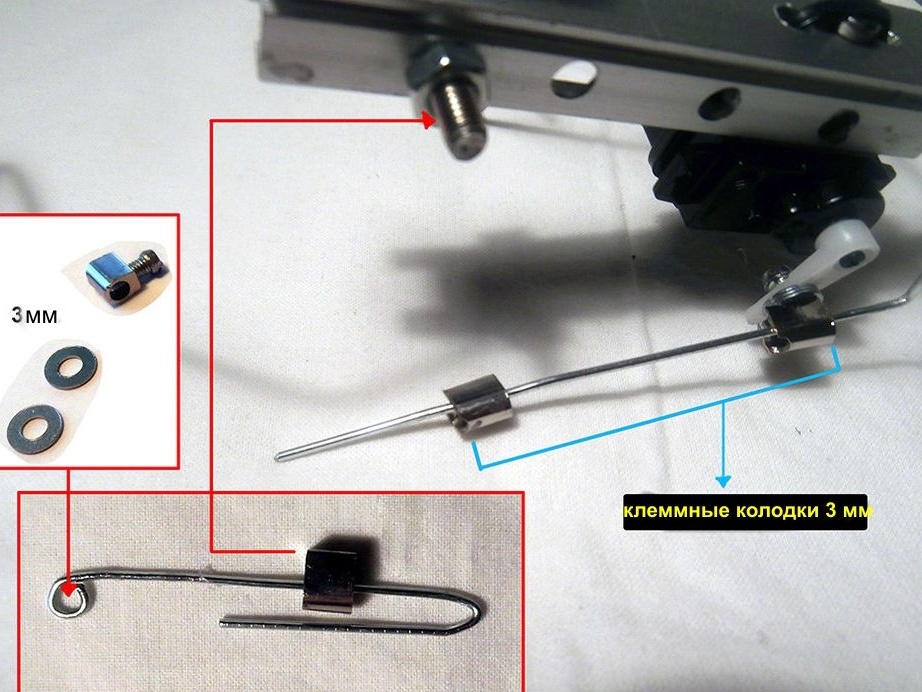
(2x) terminalblokker (3mm)
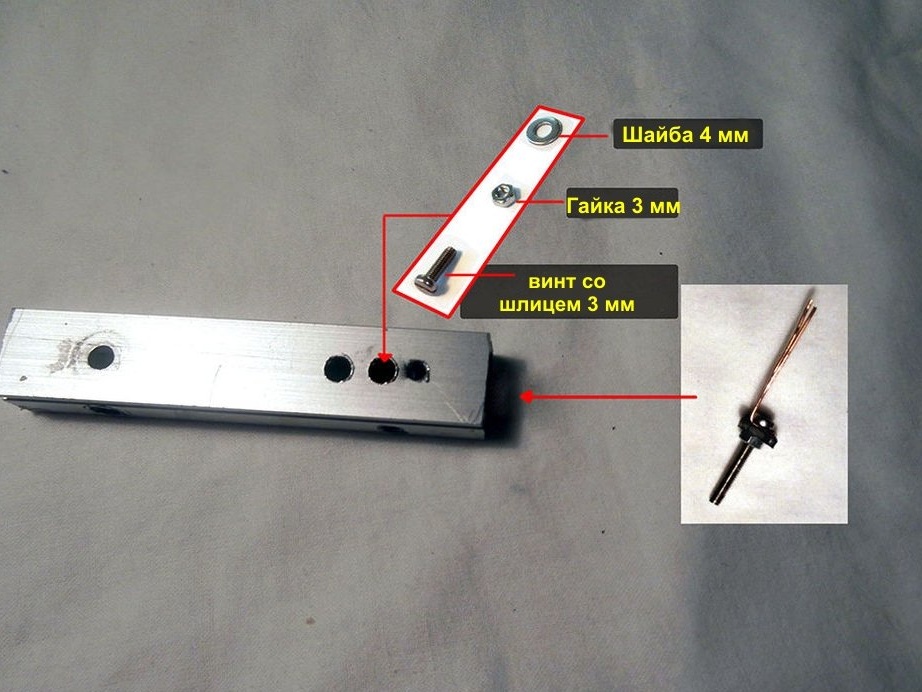
(1x) rekkeklemmer (4mm)
(1X) Brukt aluminiumsprofilblokk
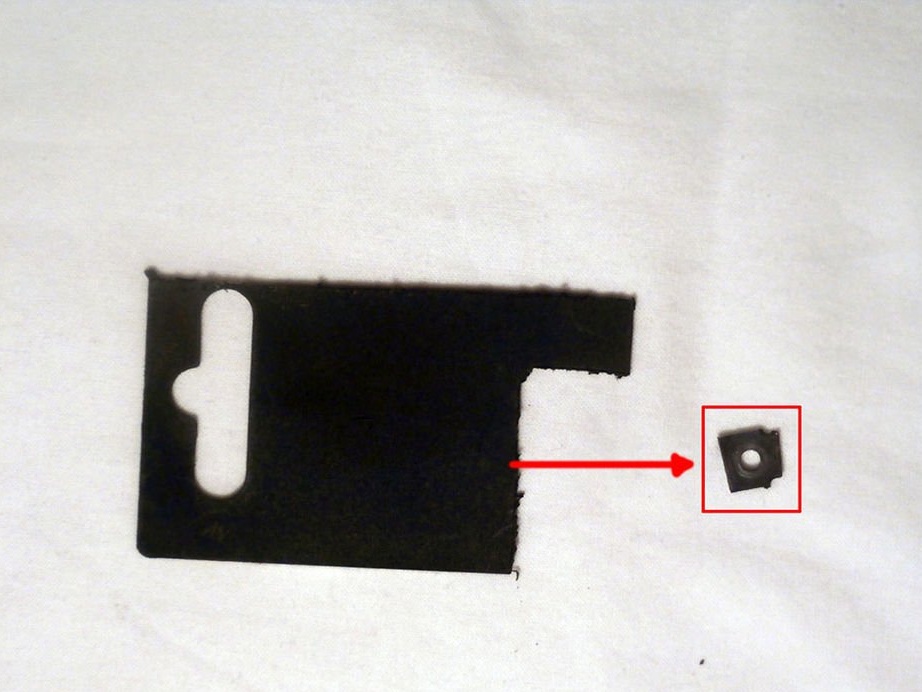
(1X) stykke plast
Ståltråd (2 mm)
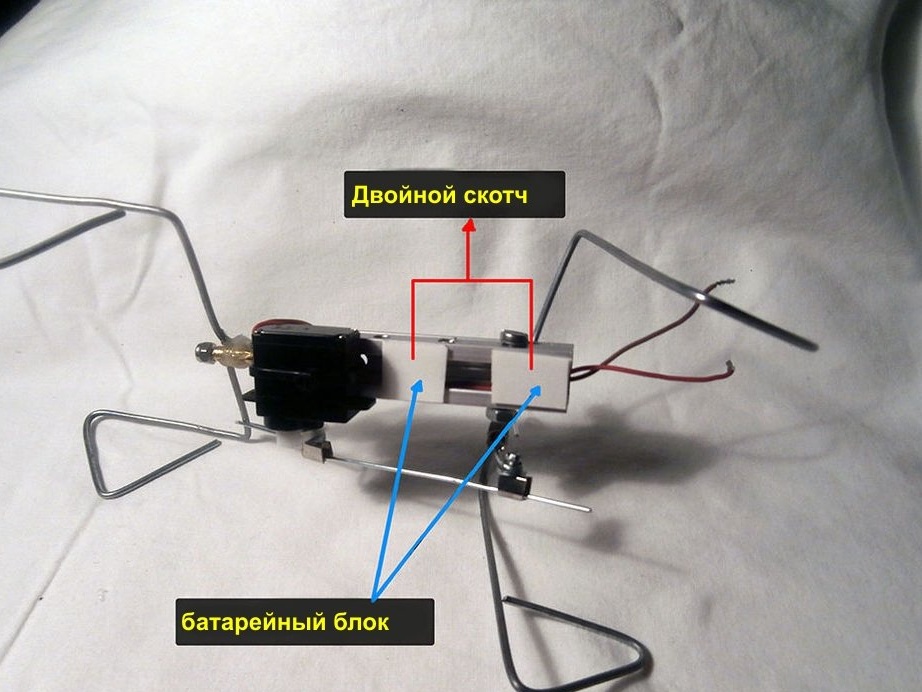
Dobbelt limtape
Messingrør
(1X) liten klemme
(1X) batteripakke (2 x AAA)
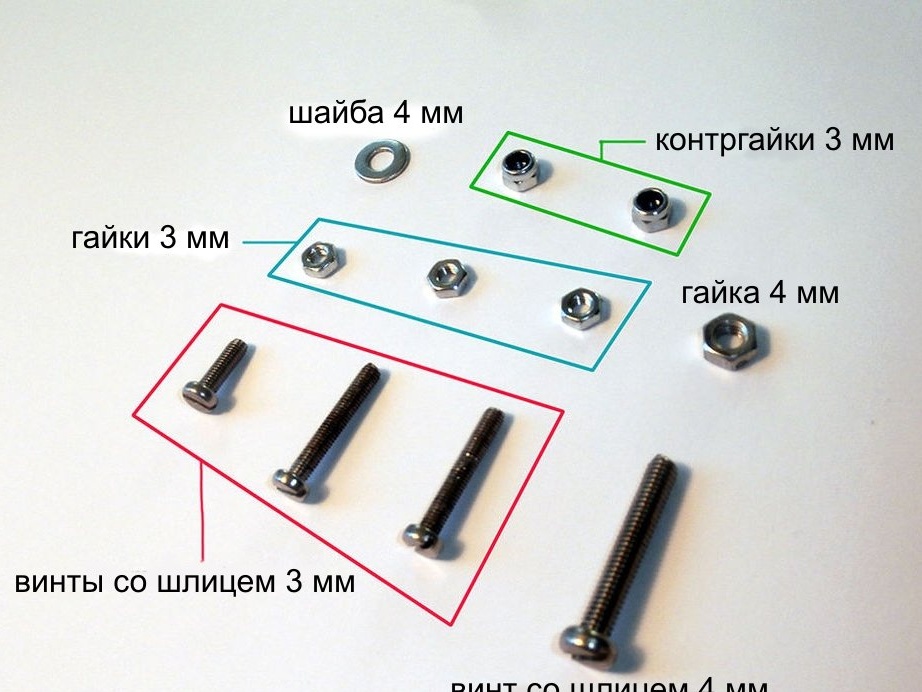
(2X) låsemutter (3 mm)
(3X) muttere og skruer (3 mm)
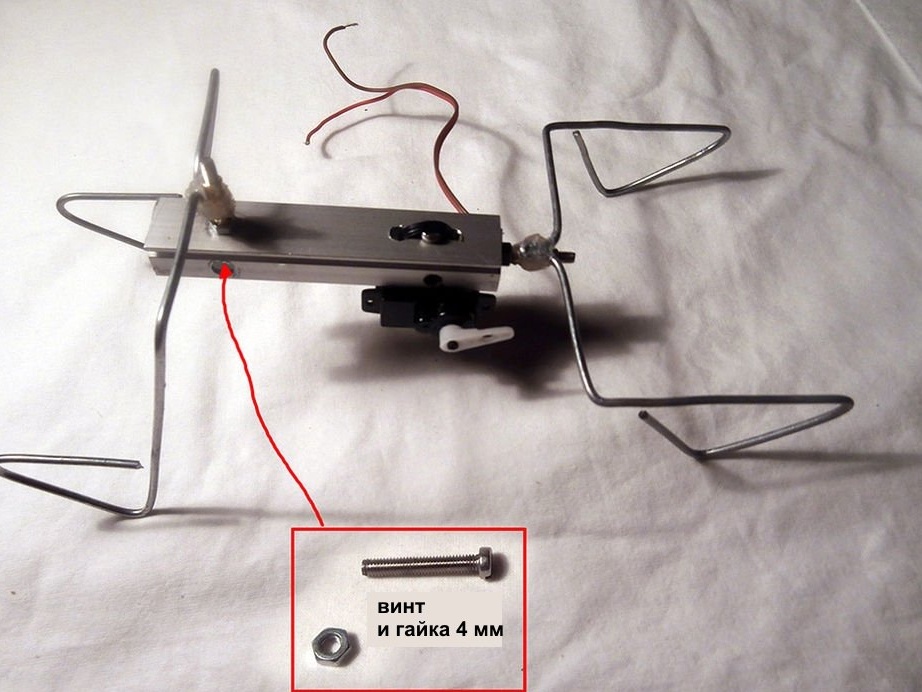
(1x) muttere og skruer (4 mm)
(5x) skive (3 mm)
(1X) skive (4 mm)
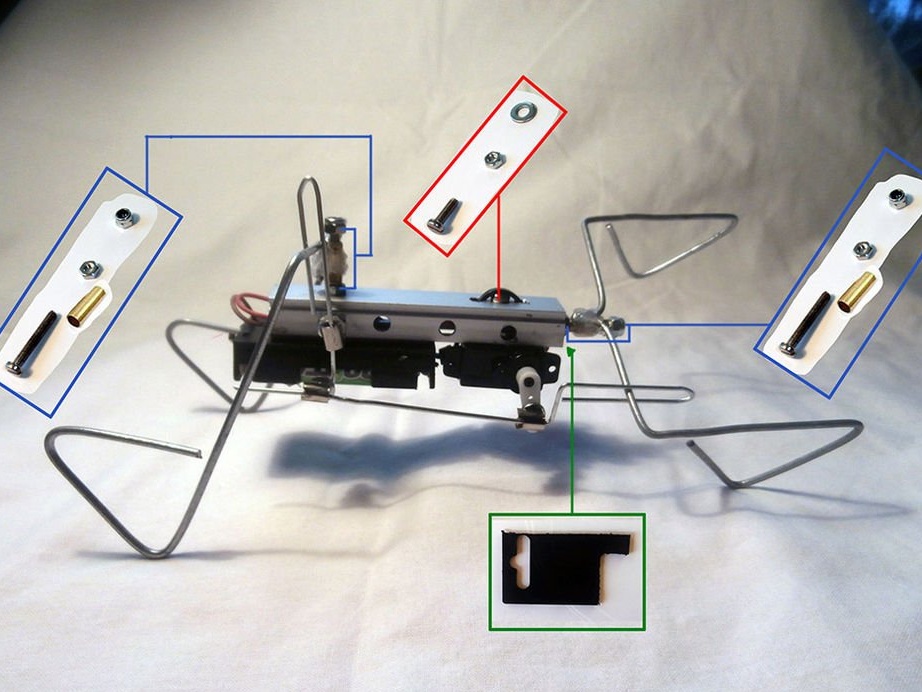
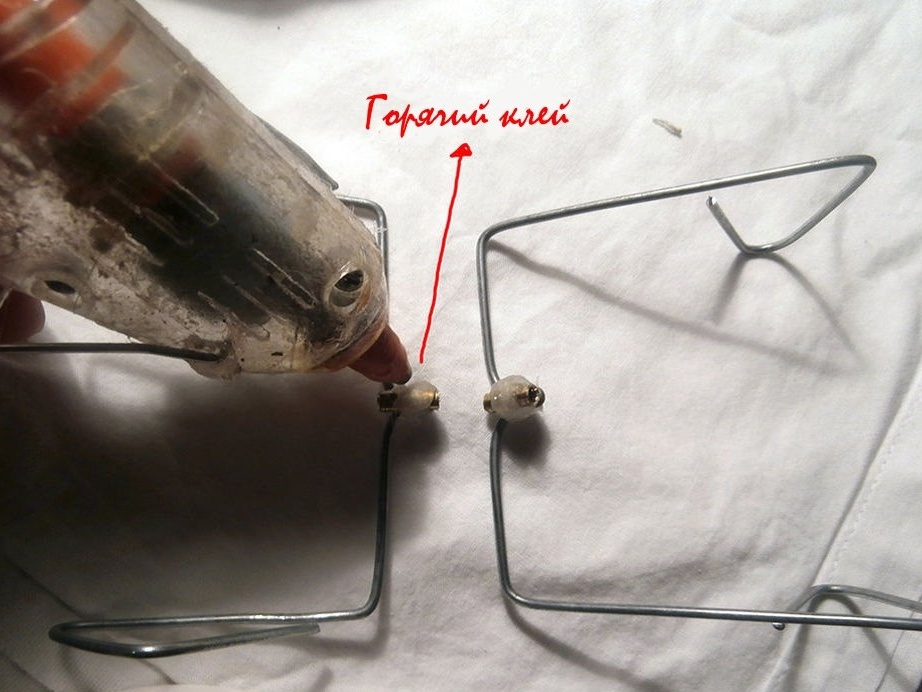
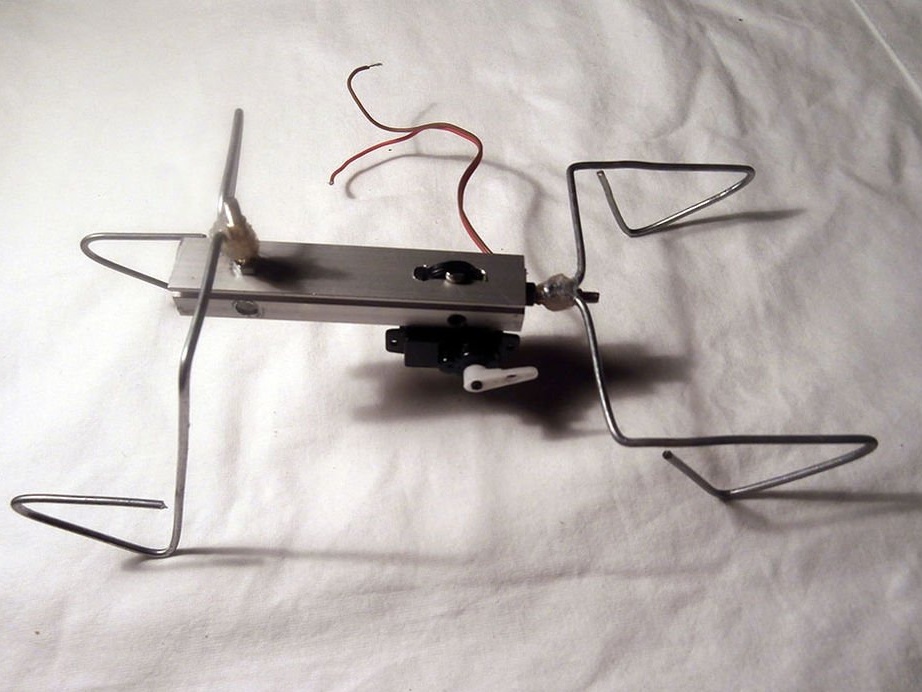
Trinn 3: Montering av deler
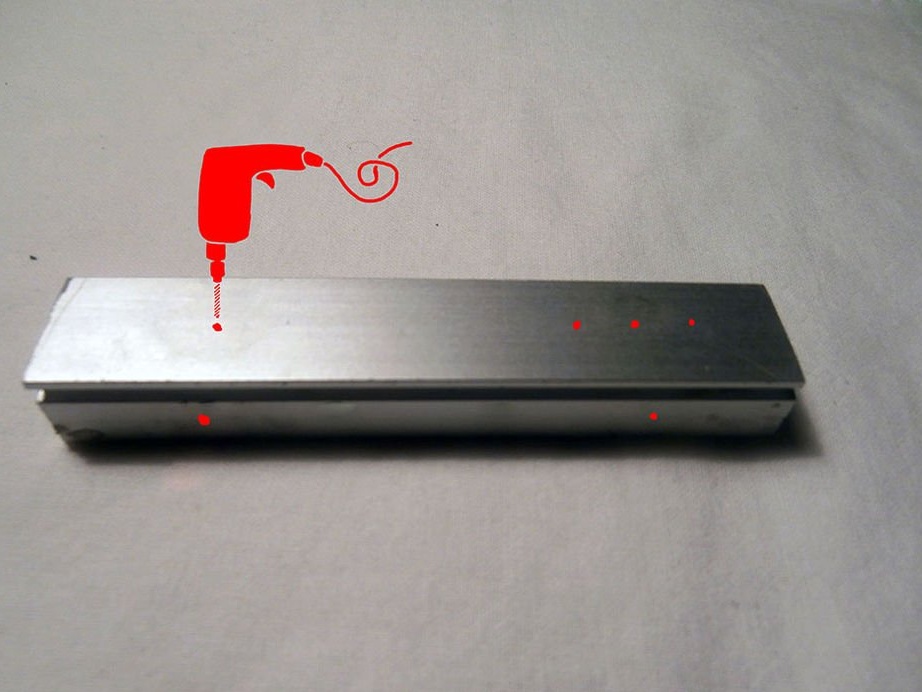
Trinn 4: Verktøy
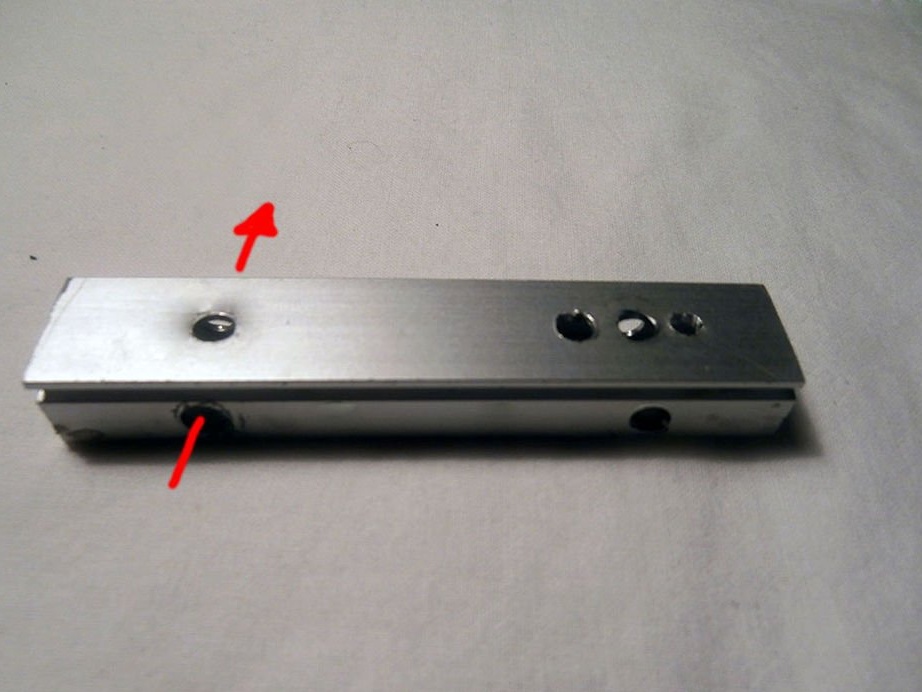
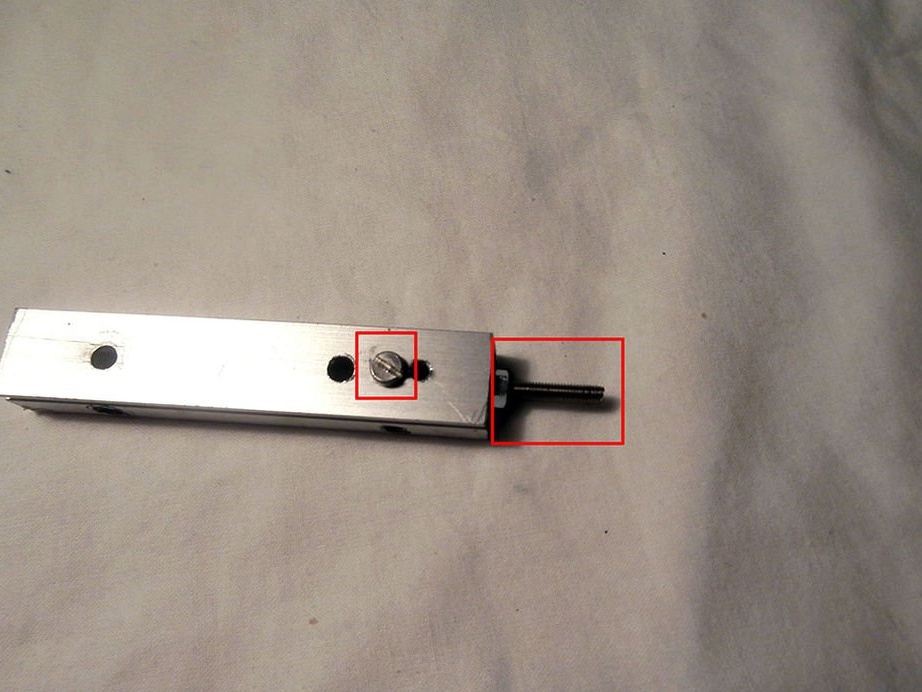
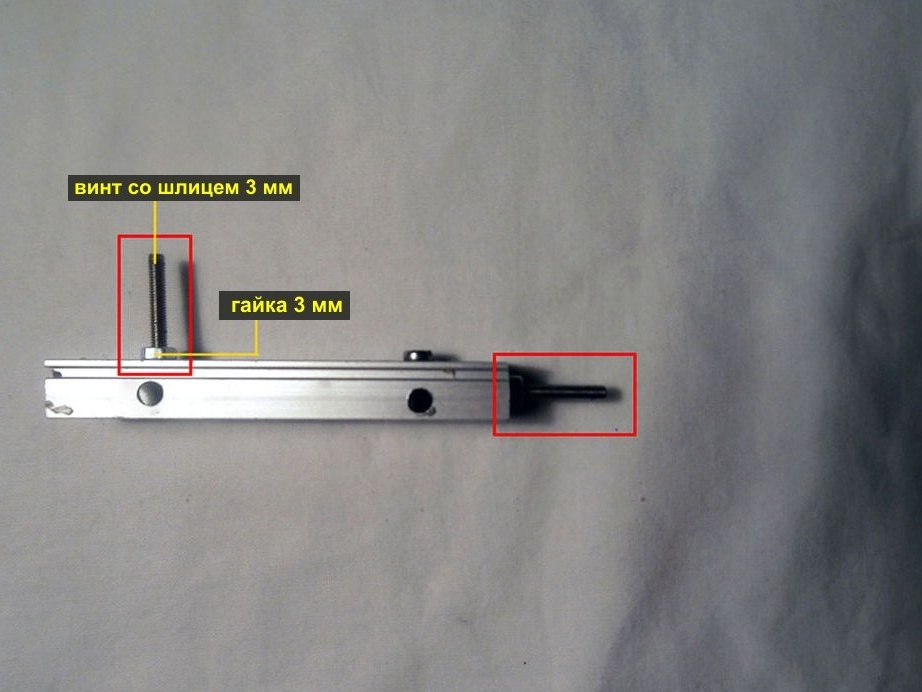
Trinn 5: Bolig

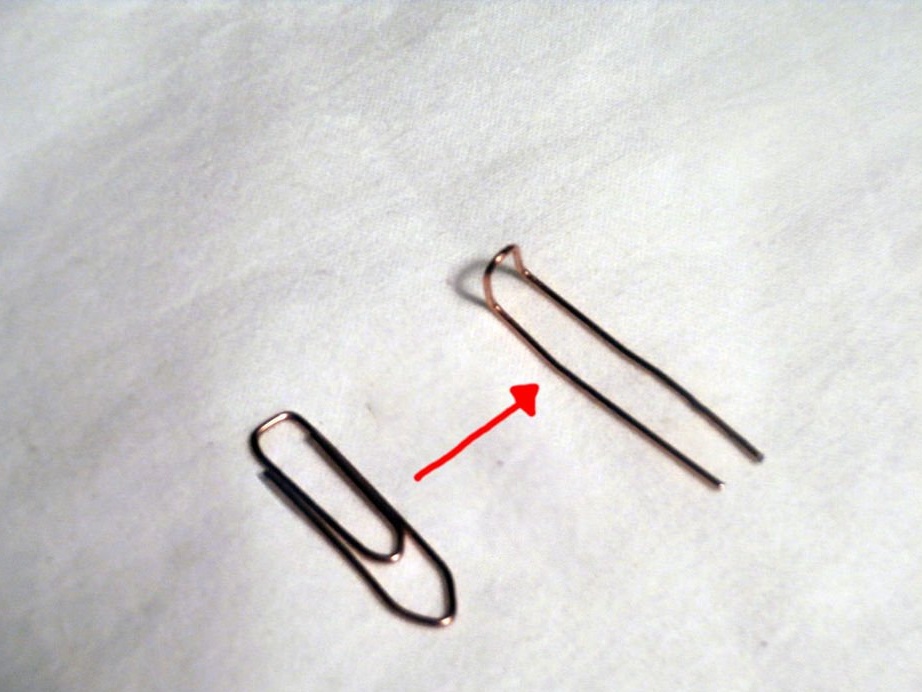

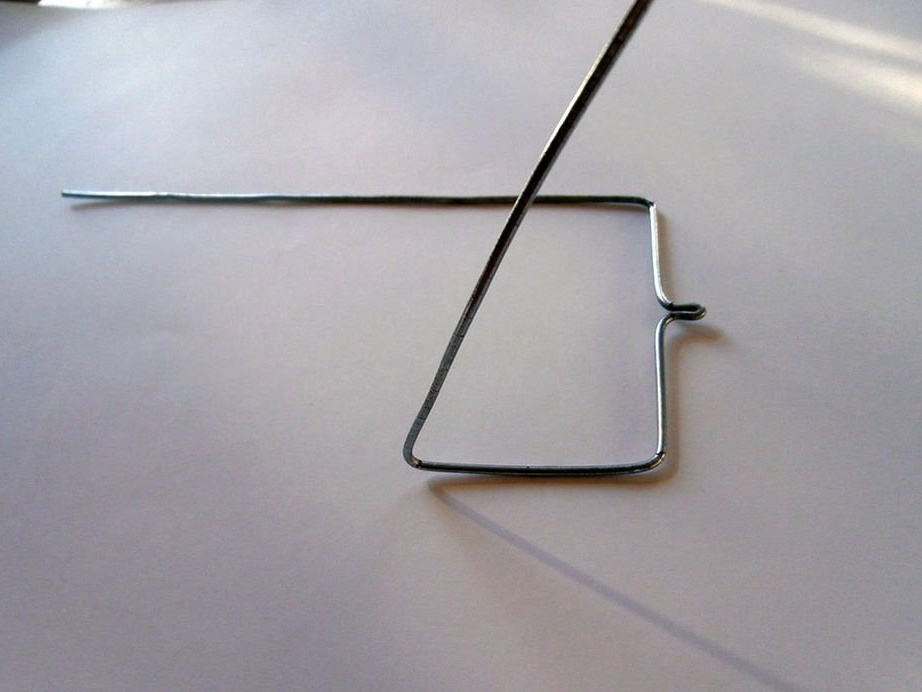
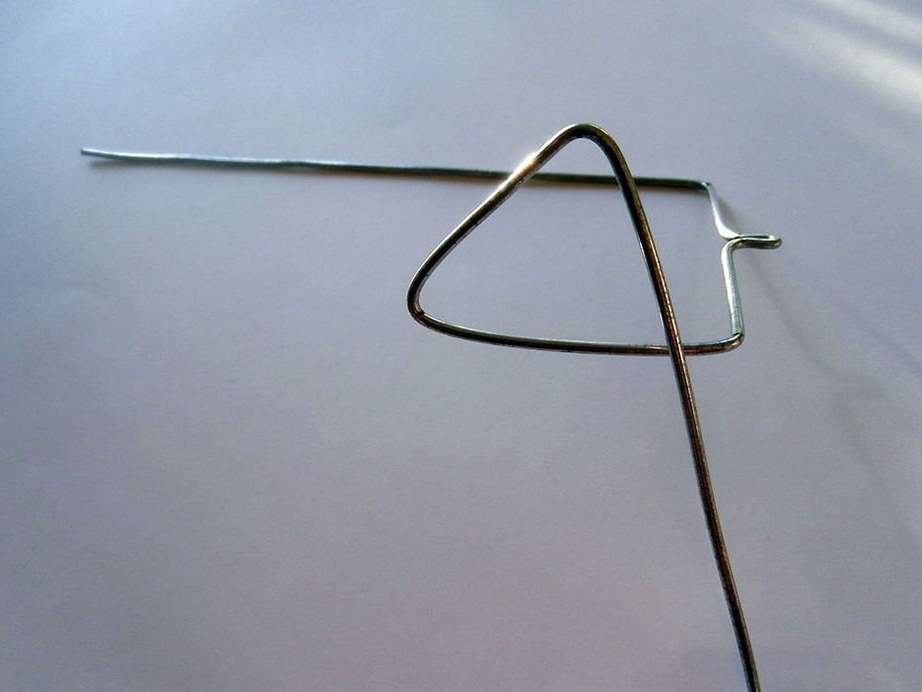
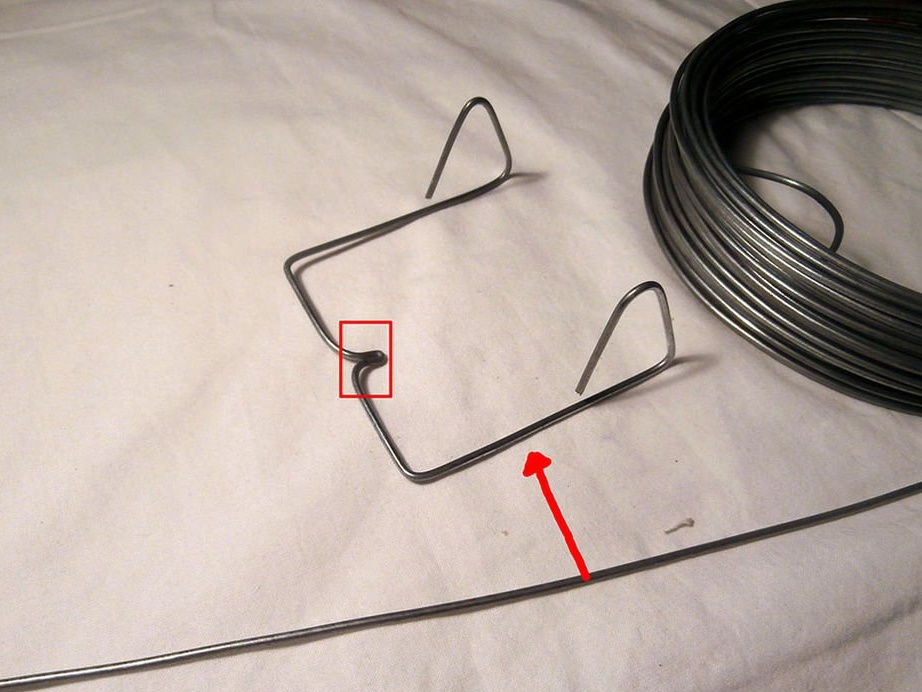
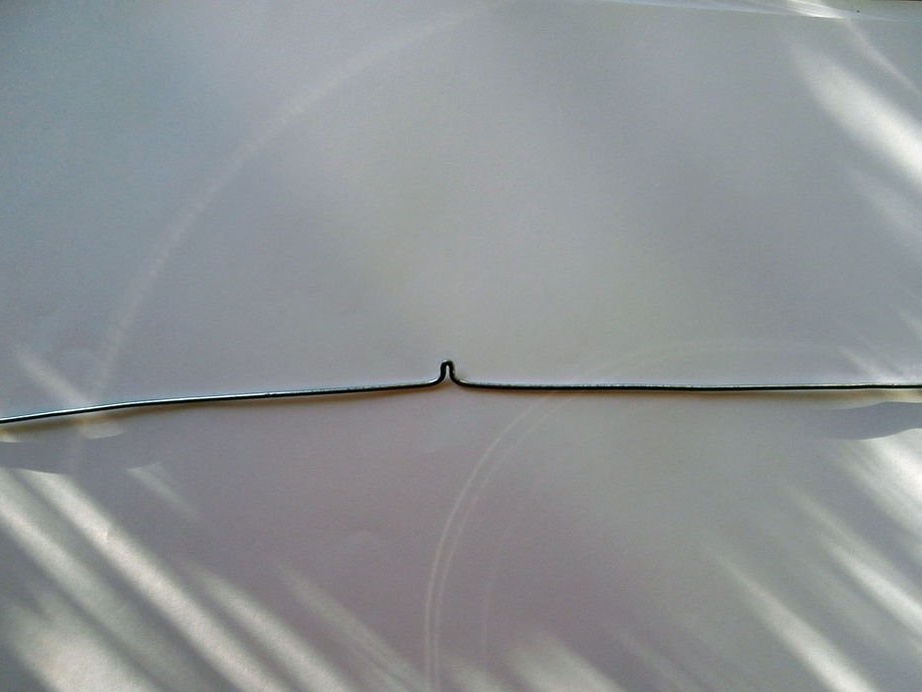
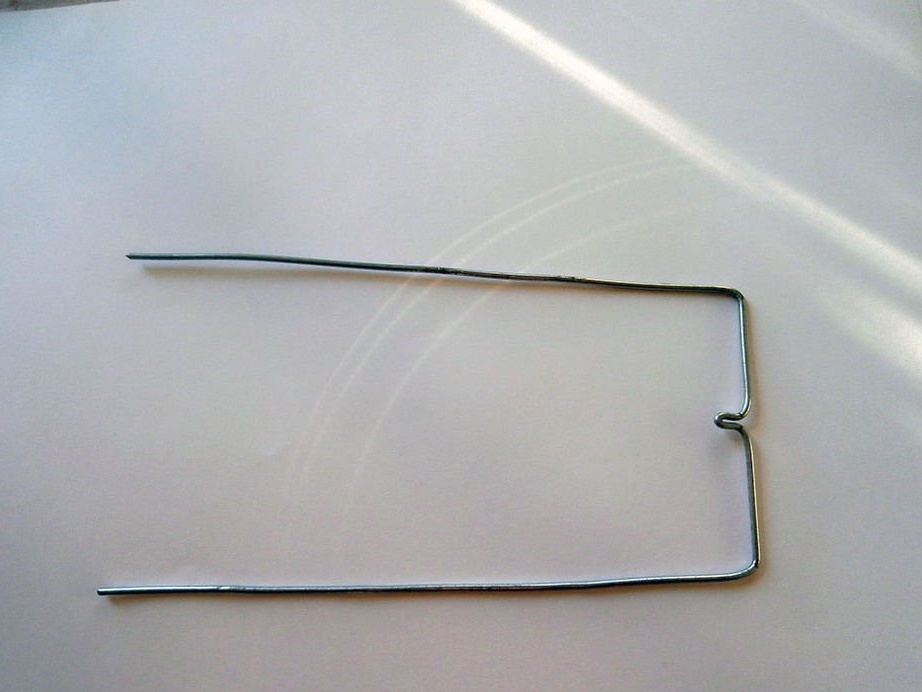
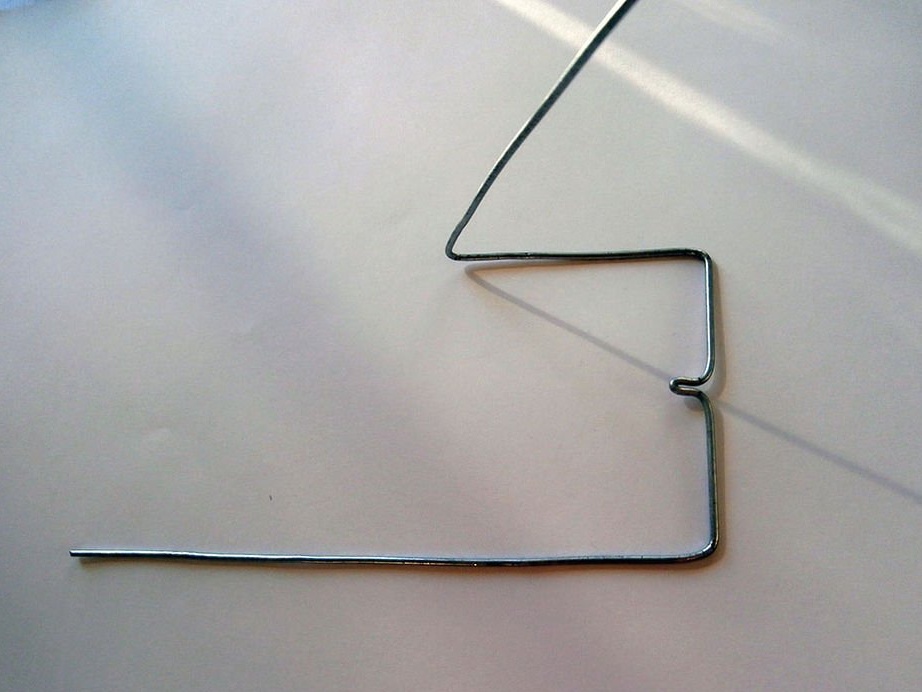
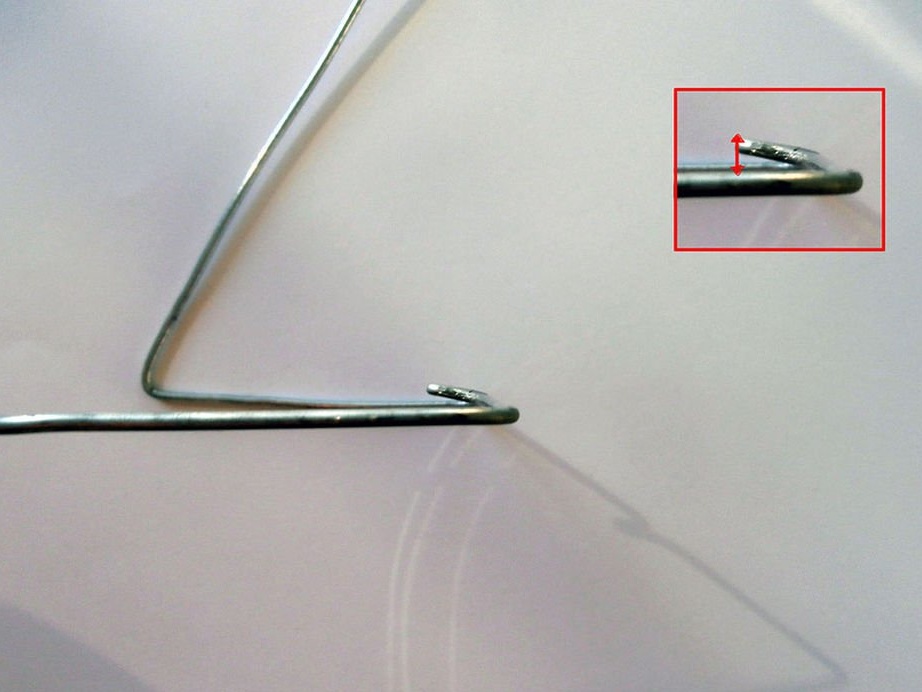
Trinn 6: forben
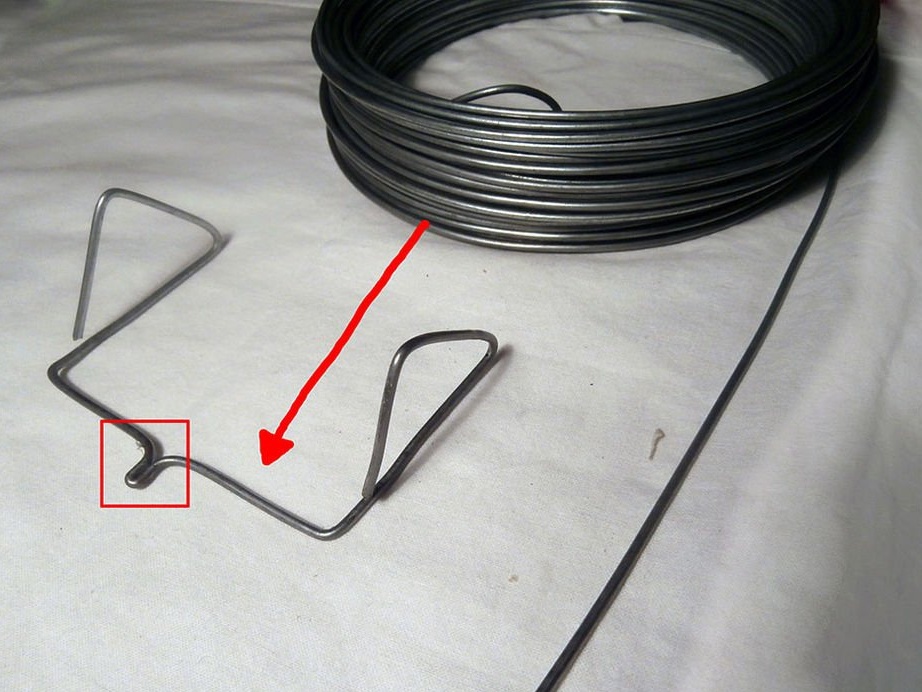
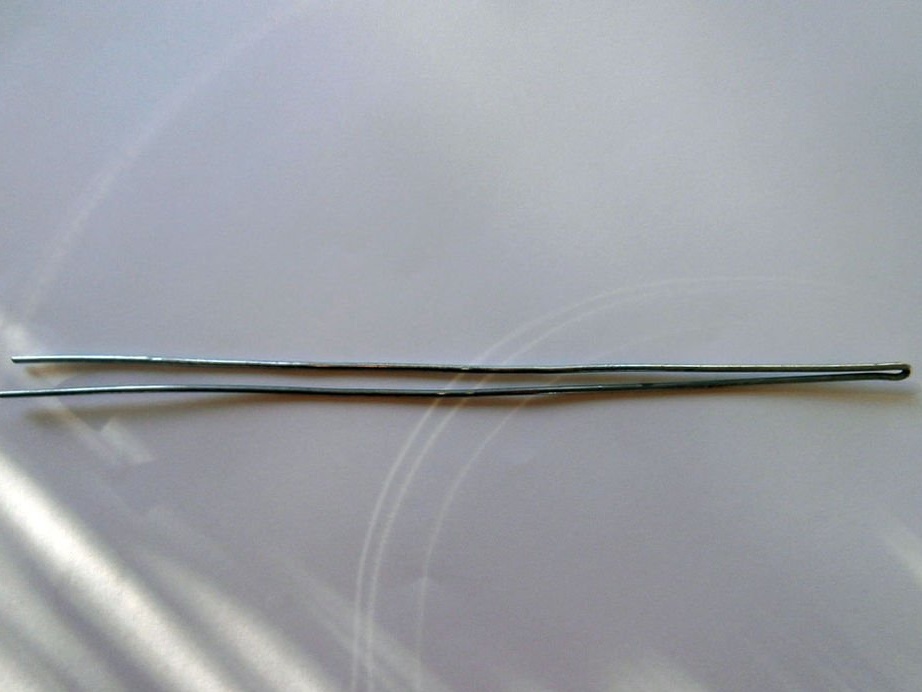
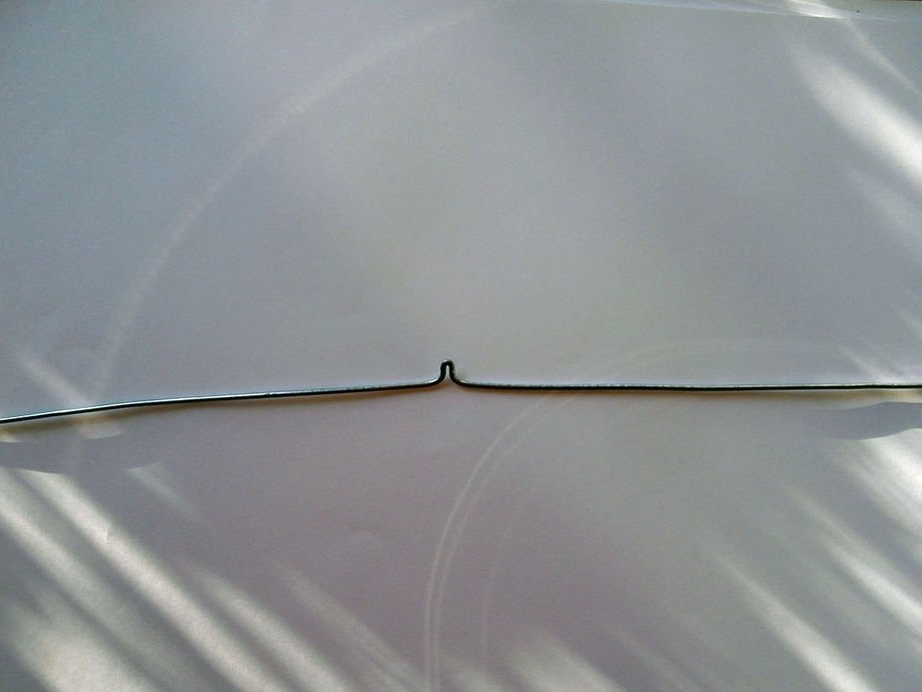
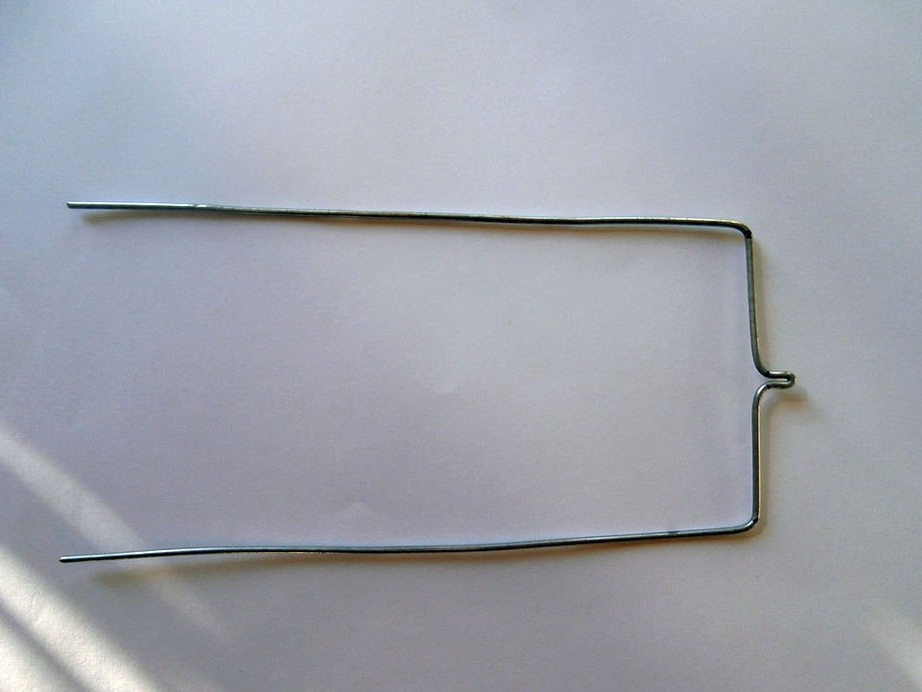
Trinn 7: Bakben
Trinn 8: Feste føttene
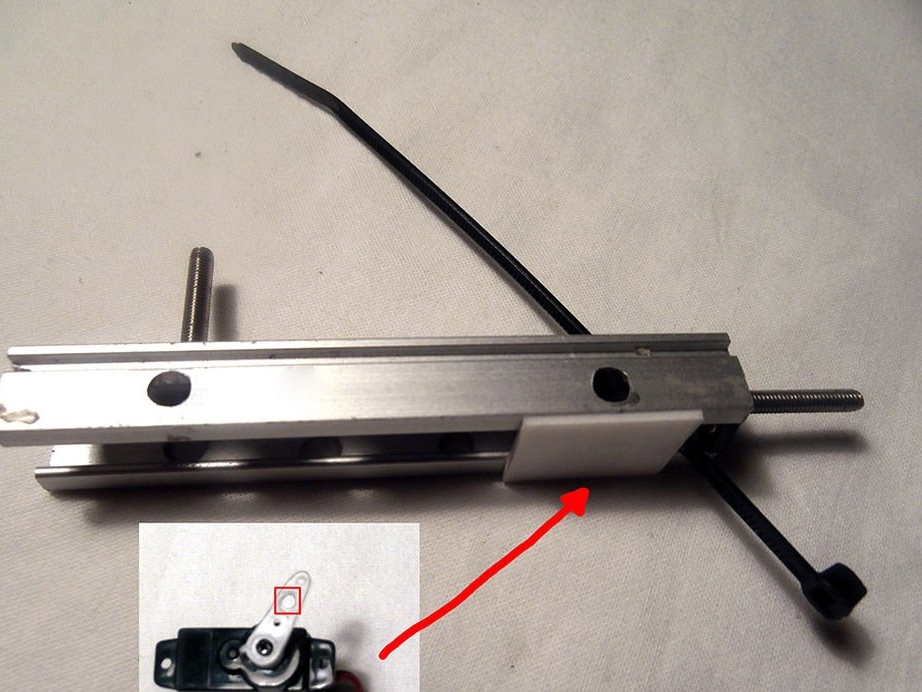
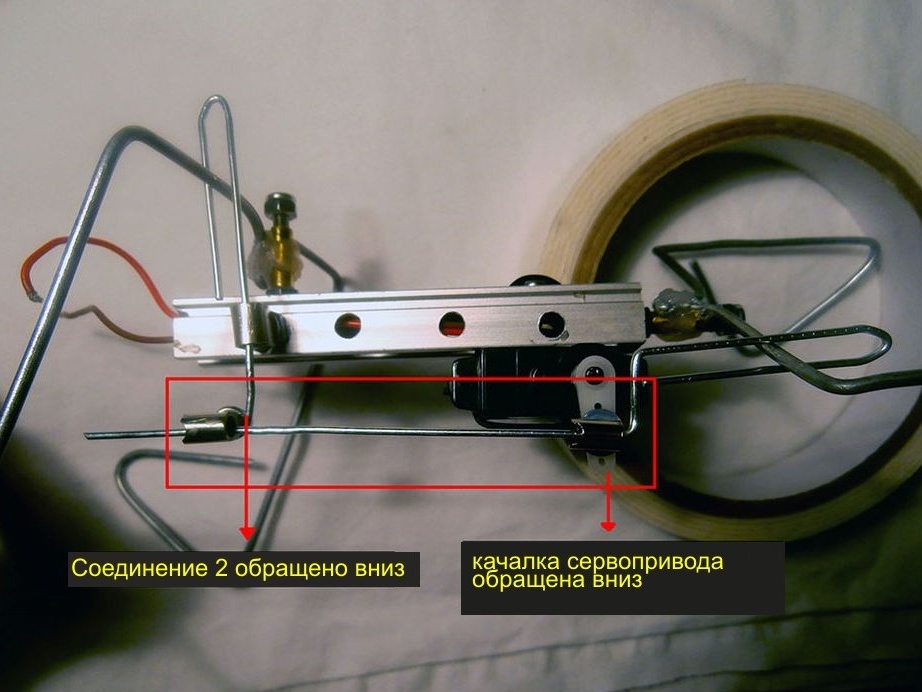
Trinn 9: Clutch
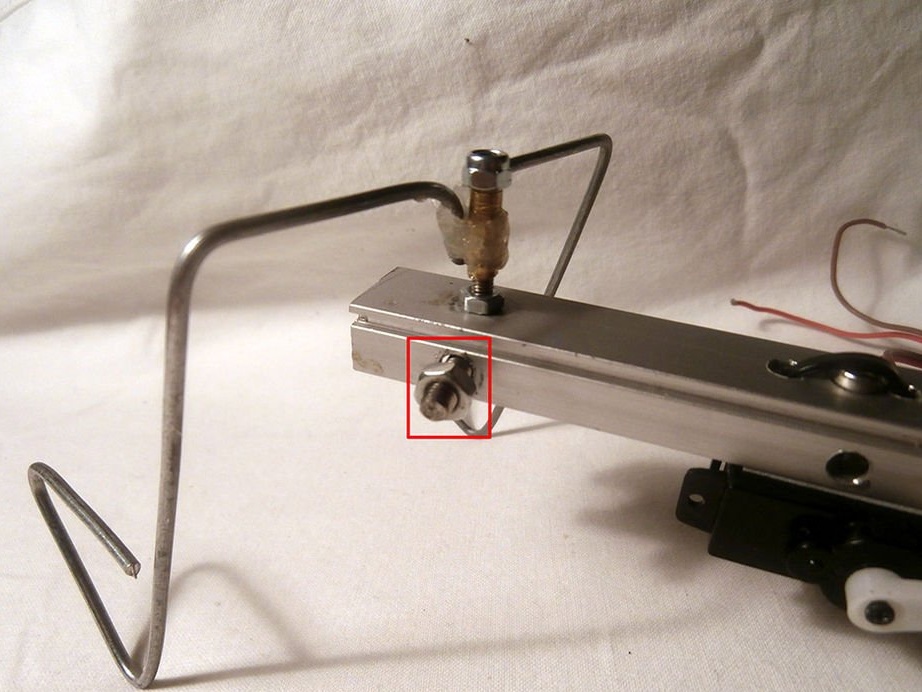
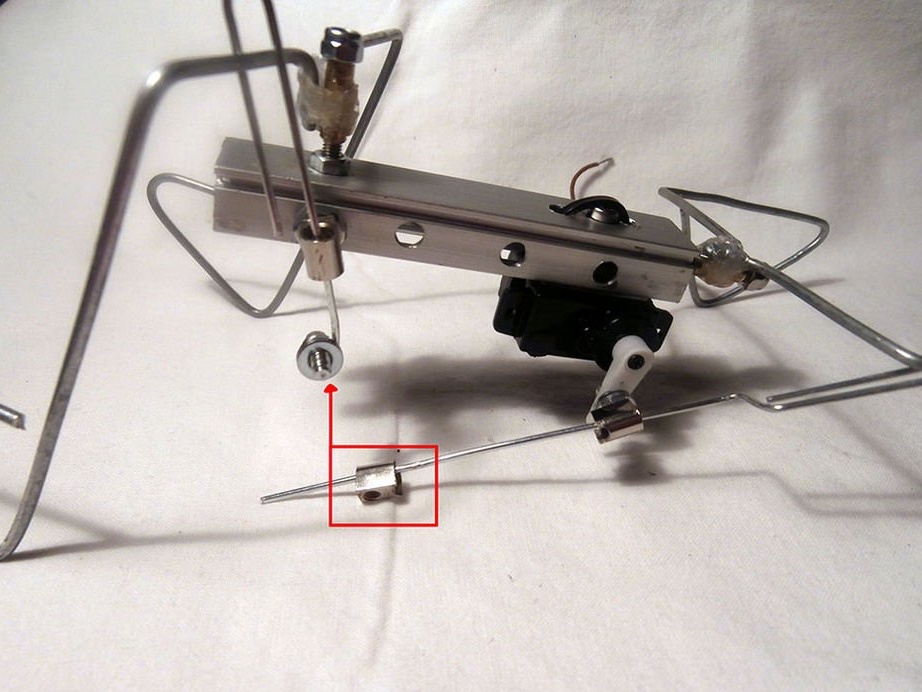
Trinn 10: Clutch Mount
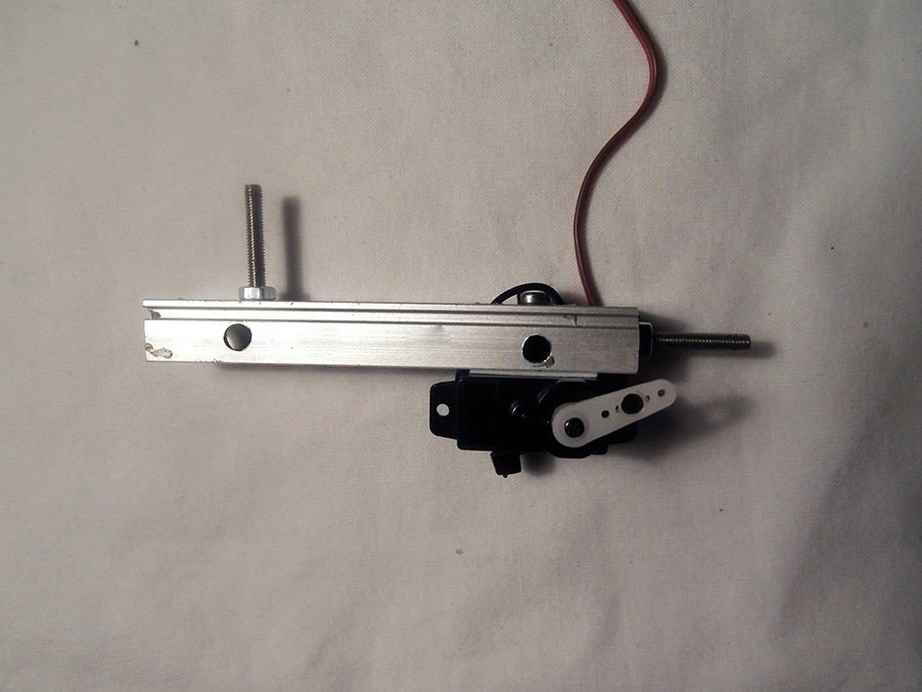
Trinn 11: den siste berøringen
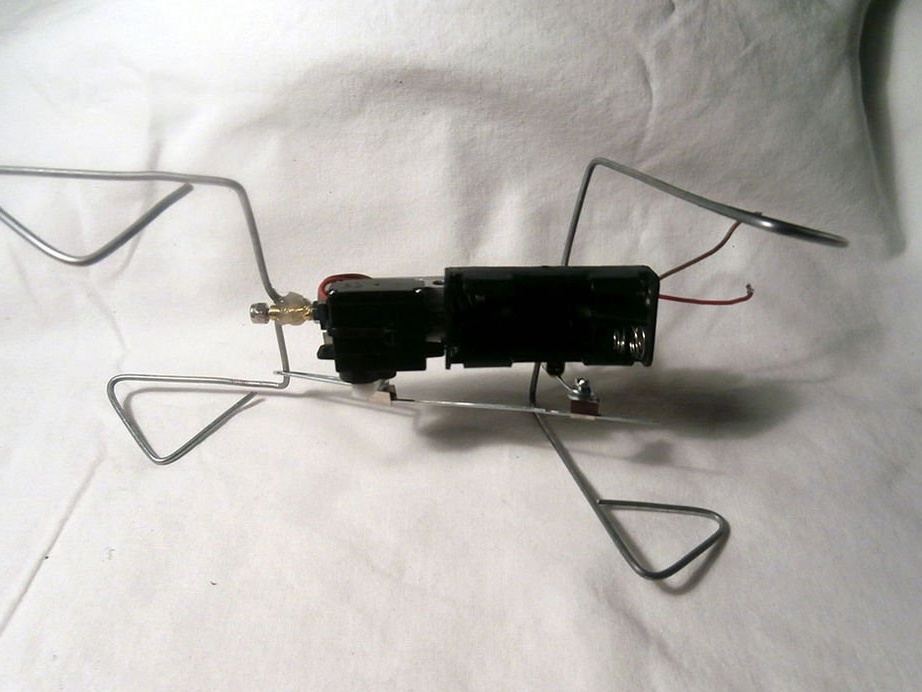
Til slutt er det bare å koble til servoen og batteriene, og roboten Uglen vil starte en reise rundt hjemmet ditt :)