

Ofte på forumene er det spørsmål om hvordan du lager en liten robot gjør det selv fra improviserte materialer. Noen vil teste styrkene og ferdighetene sine med å lage miniroboter, og noen vil bare overraske venner eller barnet deres. Faktisk er alt ganske enkelt, du trenger bare å vise litt tålmodighet og oppfinnsomhet.
Vi gjør oppmerksom på følgende video:
For å lage en liten insektrobot trenger du:
- hagelampe (solbatteri);
- to kondensatorer;
- motor;
- transistor VD135;
- transistor A733P;
- LED;
- motstand;
- loddejern;
- kobberledninger;
- en kniv;
- varmt lim;
- binders.
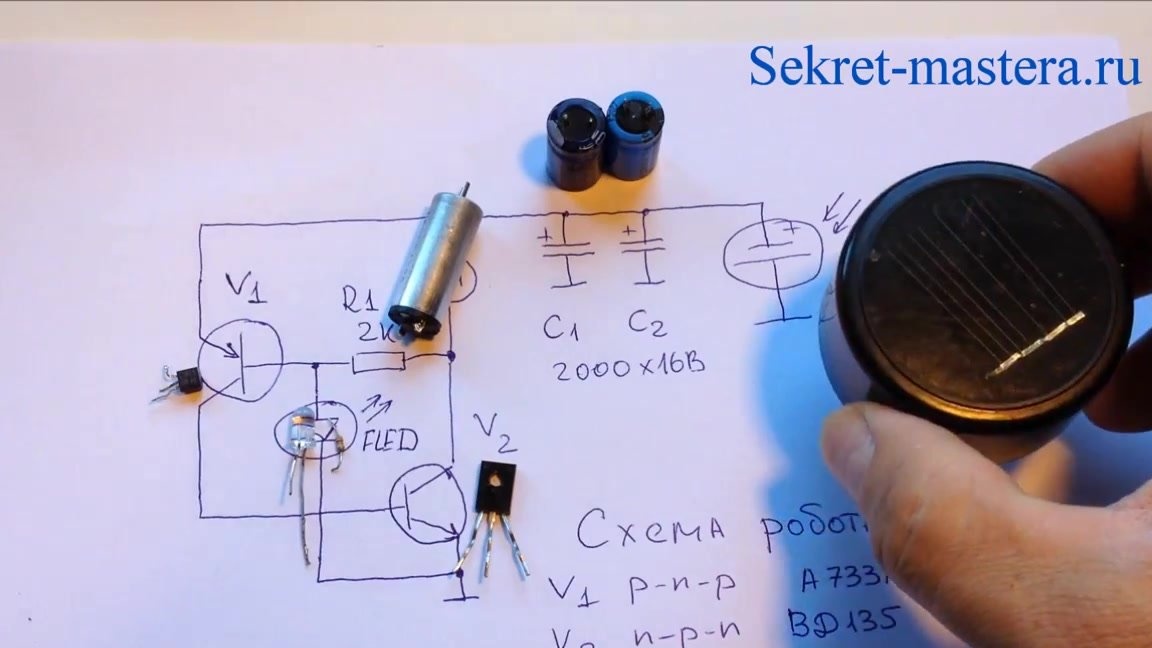
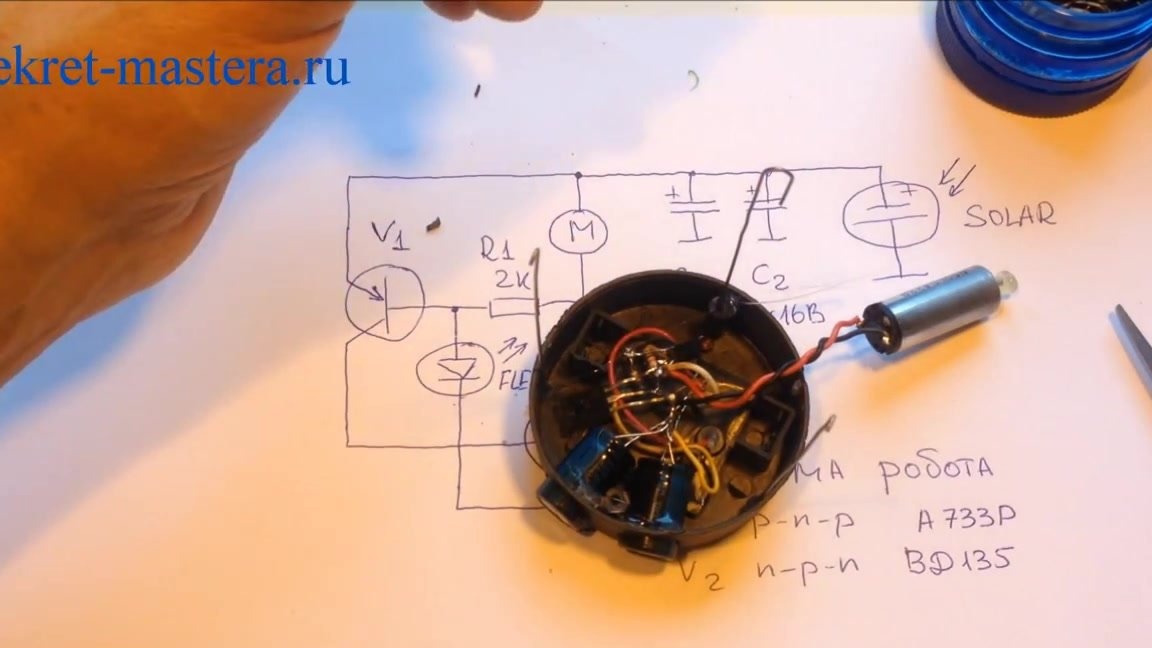
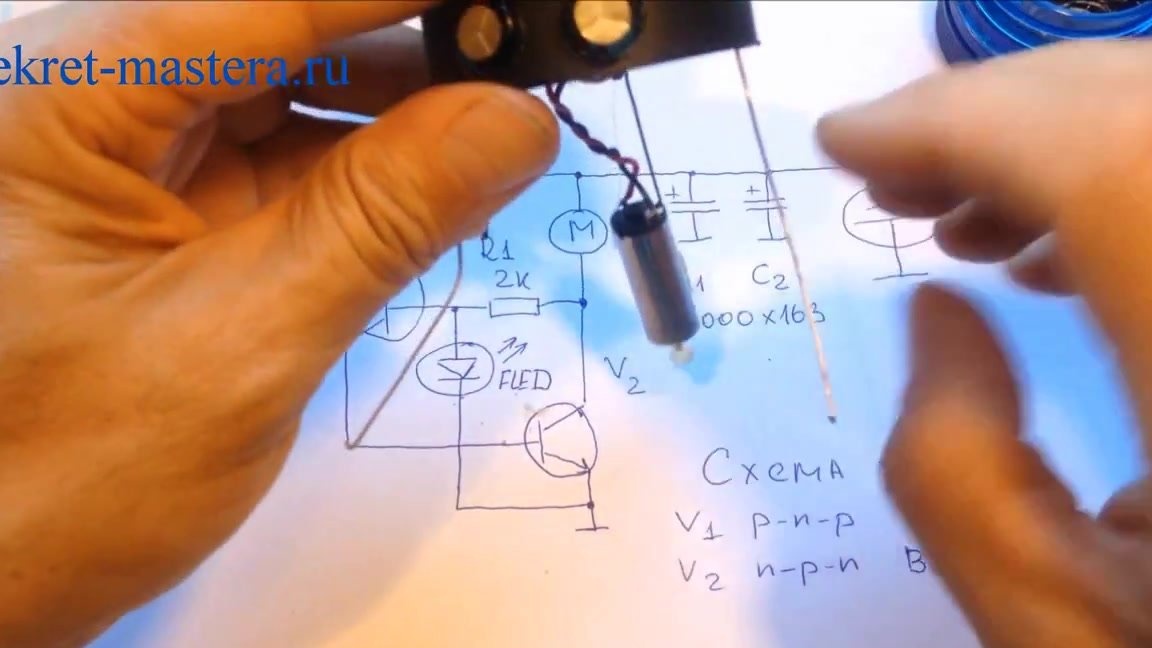
Kapasitansen til hver kondensator er 2000 μF, vurdert for en spenning på 16V.
Motoren kan brukes fra en gammel tannbørste, og du kan også bruke motoren fra et gammelt filmkamera.
En kraftig transistor (det er tillatt å erstatte den med en middels krafttransistor), en n-p-n struktur, i dette tilfellet vil bruke VD135.
Den andre transistoren av p-n-p-strukturen i dette tilfellet vil bruke A733P.
En blinkende LED som gir blink med jevne mellomrom.
2 kΩ motstand.

Etter at alle nødvendige radioelementer er utarbeidet, begynner vi å jobbe.
Arbeidsprinsipp:
Energi fra solbatteriet akkumuleres på to kondensatorer, og med en viss frekvens aktiveres LED-en, som leverer strøm gjennom en kraftig nøkkeltransistor til motoren. I dette tilfellet tømmer motoren kondensatoren og utfører noen rotasjonsbevegelser.
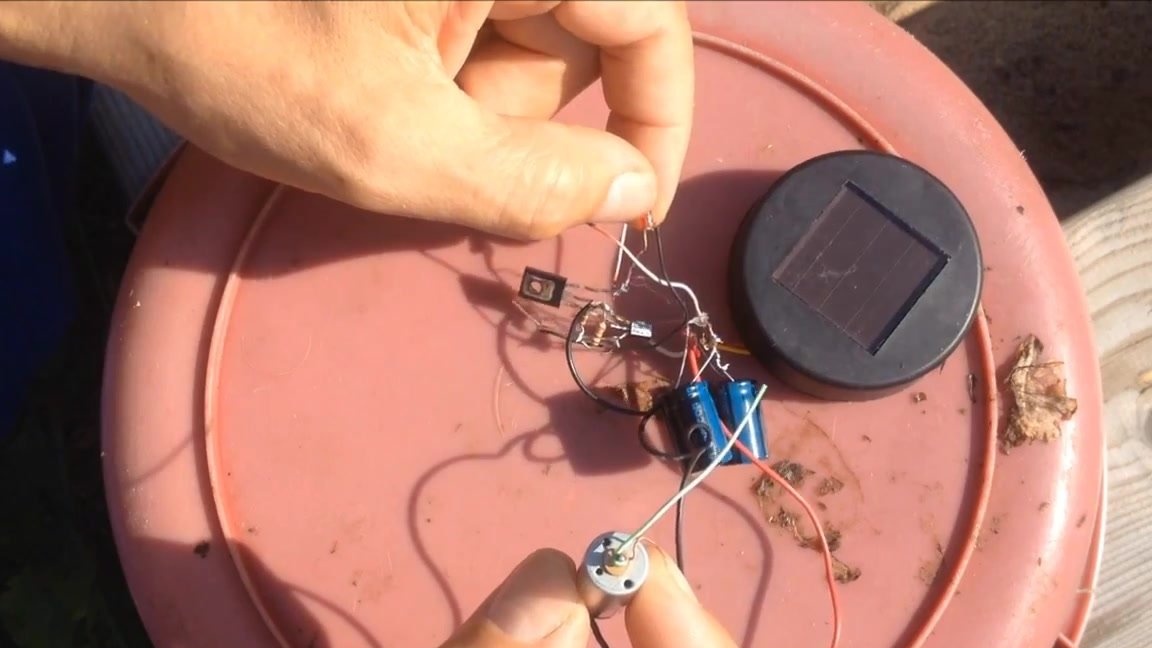
forsamlingen:
Når det gjelder solbatteriet, lager vi to hull med kniv og setter inn kondensatorer i dem - dette vil være øynene til insektet vårt. Vi fikser dem med smeltlim.
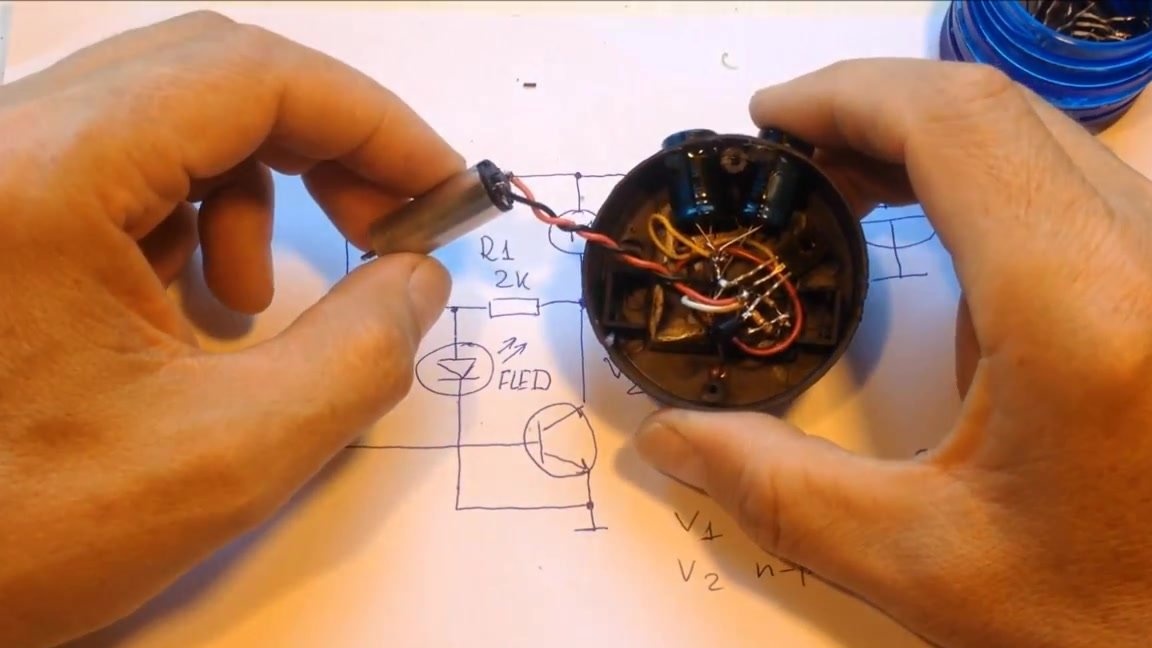
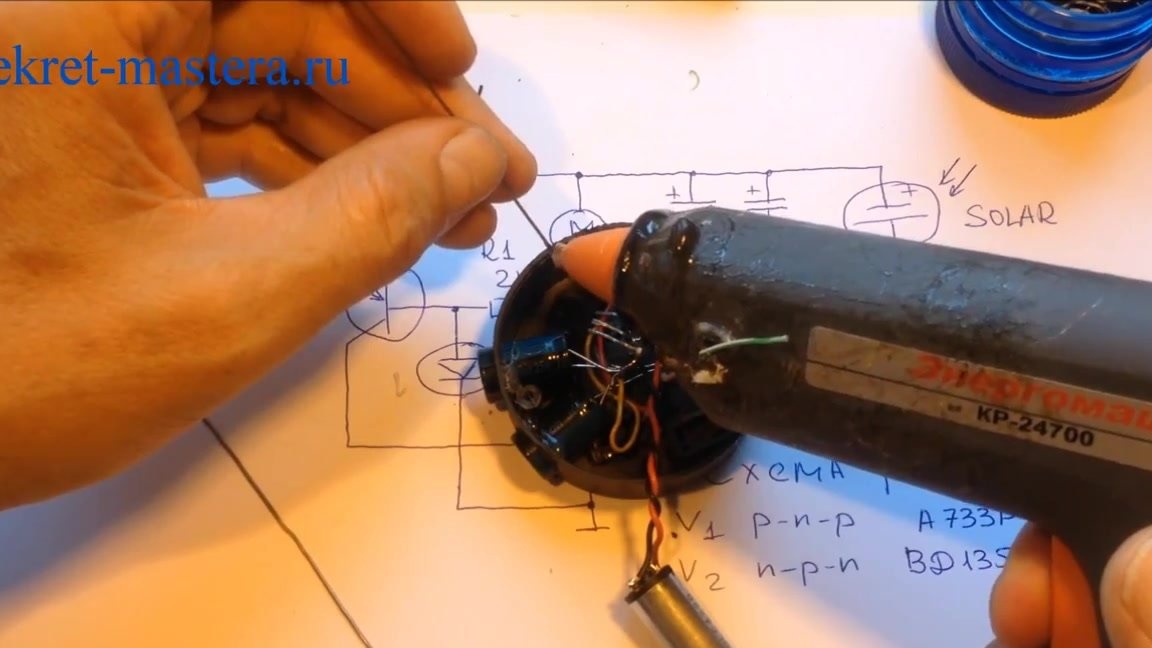
Da samler vi alle radioelementene i henhold til ordningen ved hjelp av loddejern og ledninger.
Alle elementene er festet inne i solenergibatteriet, på en langstrakt ledning lar vi bare motoren og fikser ikke den.
En stor dråpe lim påføres spissen av motoraksen, du kan til og med flere ganger for å danne en liten ball på spissen.
Vi lager bena på insektet vårt fra vanlige binders.Rett ut bindersen, og la bare den lille spissen være fri, og fest den på kroppen med smeltlim. Totalt vil vi ha tre bein.
Vi fester motoren vår på et av bena, slik at roboten lente seg på en ball dannet på slutten.
Eventuelt kan du gi bena den nødvendige formen, litt bøye eller rette.
