
Materialer og verktøy for produksjon:
- gjengede sjakter;
- kryssfiner;
- bolter og muttere;
- kulelager;
- trinnmotorer som Nema 23;
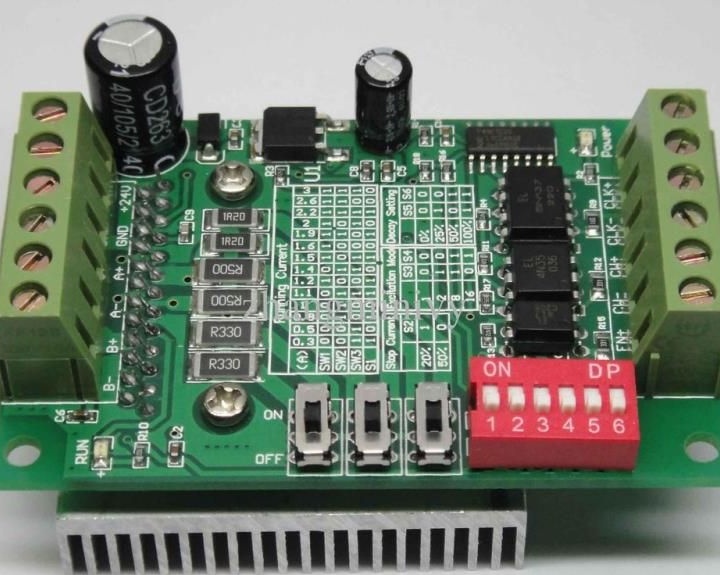
- TB6560 drivere er nødvendig for trinnmotorer;
- installasjonen drives av en spenning på 24 V 15 A;
- Arduino UNO R3;
- metallforinger, samt gjennomføringer laget av nylon (mulig fra caprolon eller fluoroplast);
- ledninger.









Produksjonsprosess:
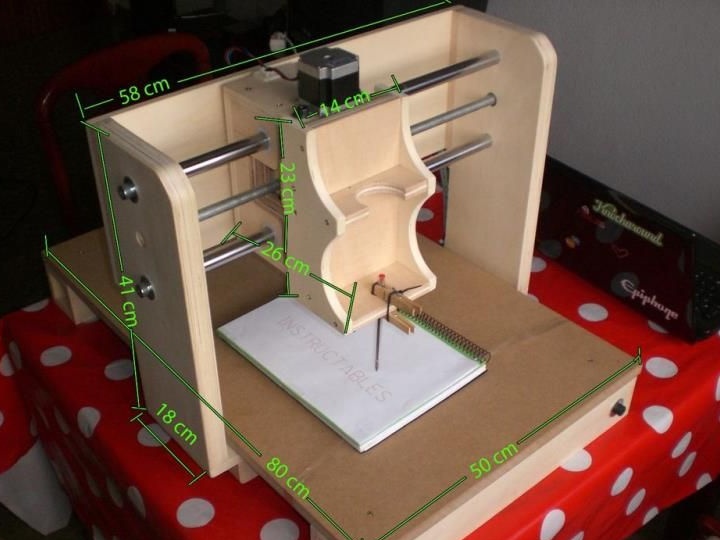
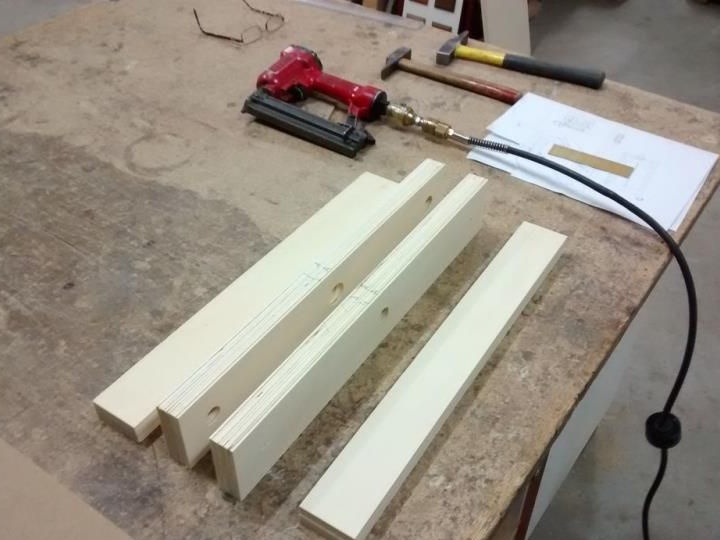
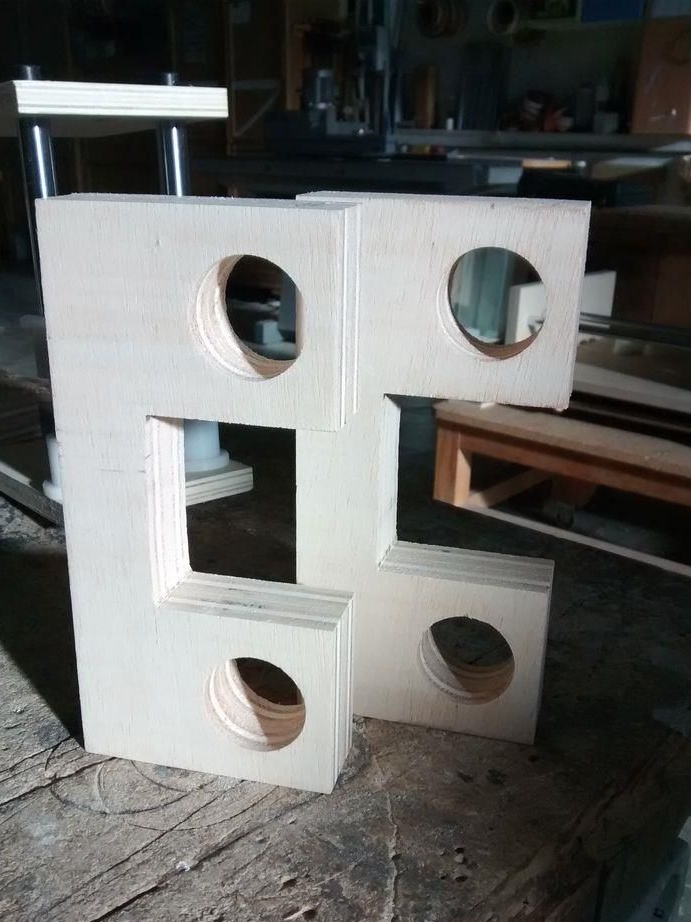
Første trinn. Gjøre basen til maskinen (X-aksen)
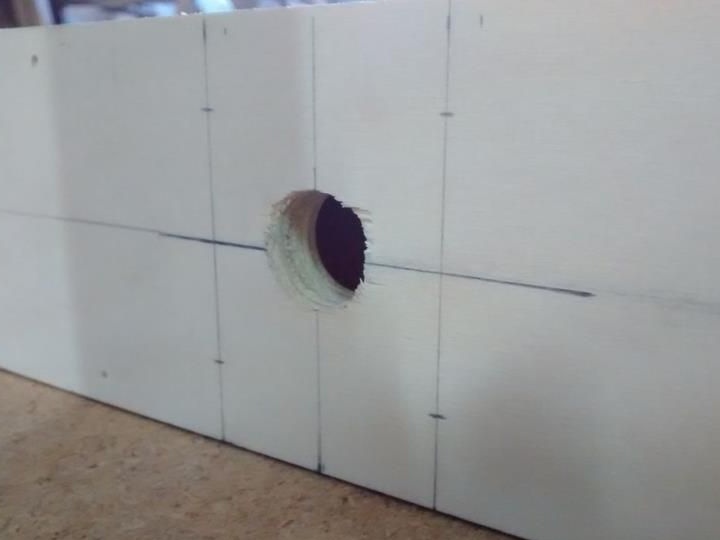
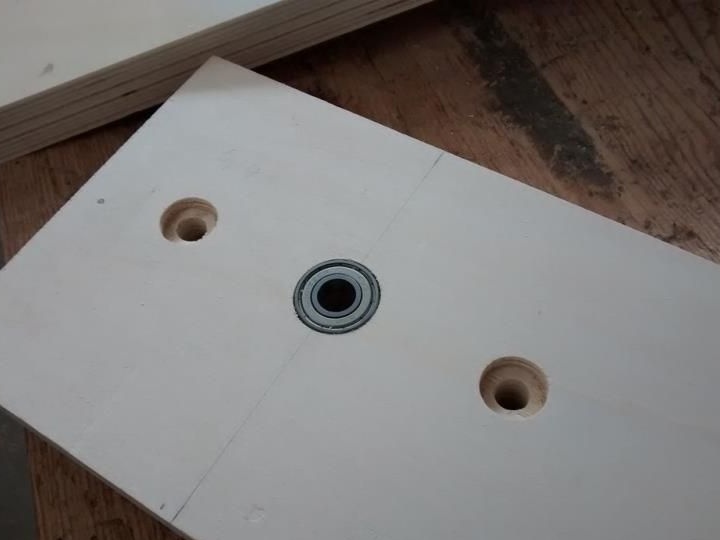
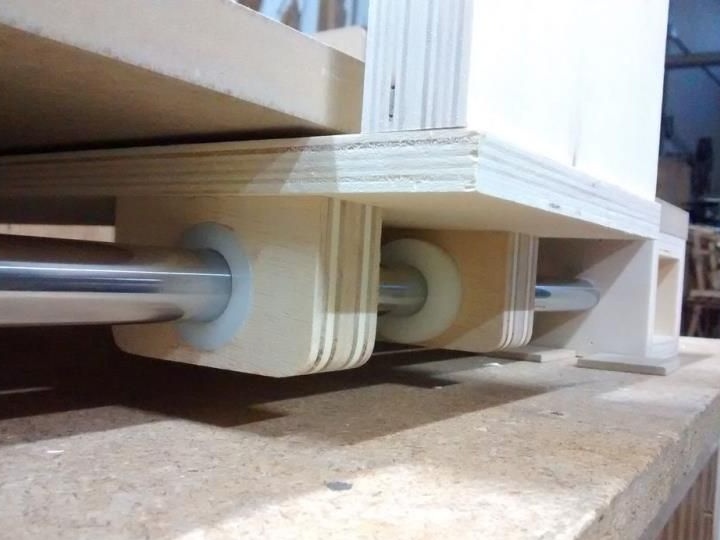
For å lage basen, trenger du flere stenger der du vil bore flere blinde og gjennomgående hull. Monter deretter metallaksler, de fungerer som en drivkraft for X-aksen.
Den gjengede akselen er installert i midten, og to stålaksler er installert på sidene som føringer. Når gjengeakselen roterer, beveger vognen trådbordet langs X-aksen.
Stangen skal være så tykk som mulig, siden jo tyngre sokkel, desto mer pålitelig vil maskinen være under drift. Og dette forbedrer på sin side utførelsen under arbeidet.






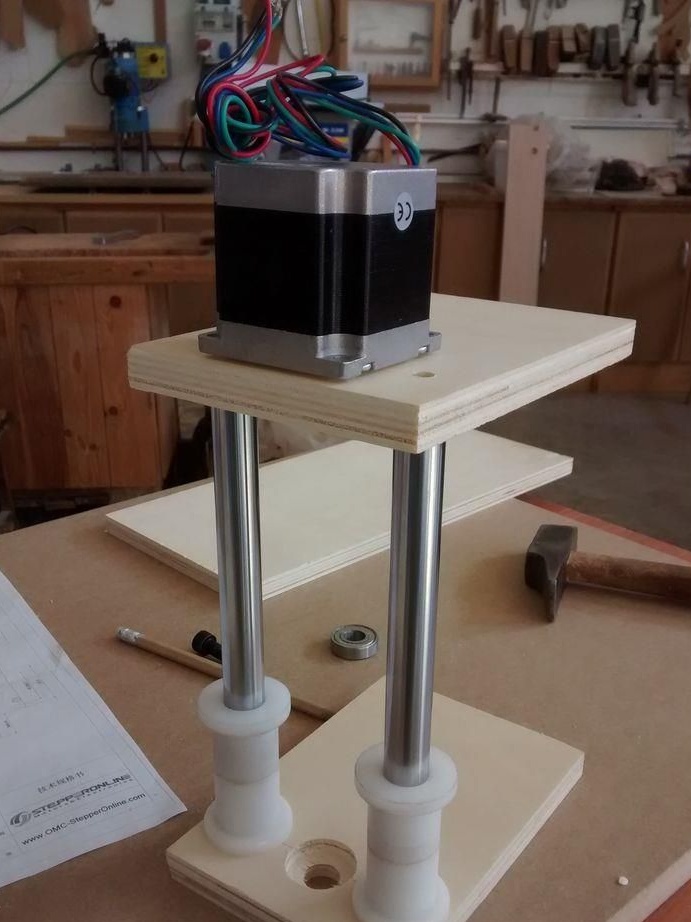
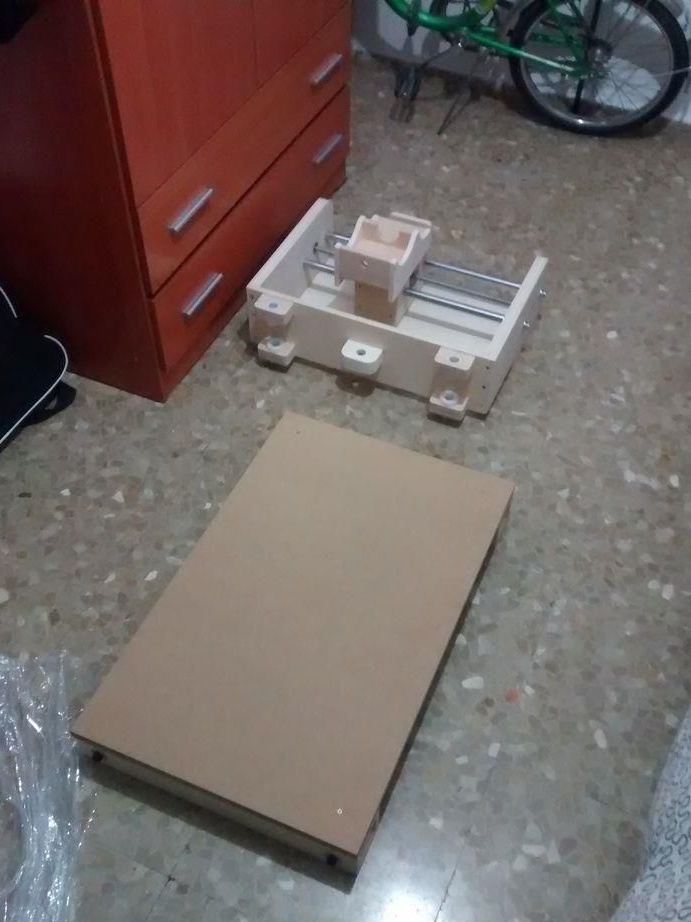
Trinn to Lag Y-aksen
Portalstrukturen for Y-aksen opprettes på samme måte som basen X. Portalen er festet på et bevegelig bord som beveger seg langs X-aksen. Som dette skjer, kan du se på bildet.




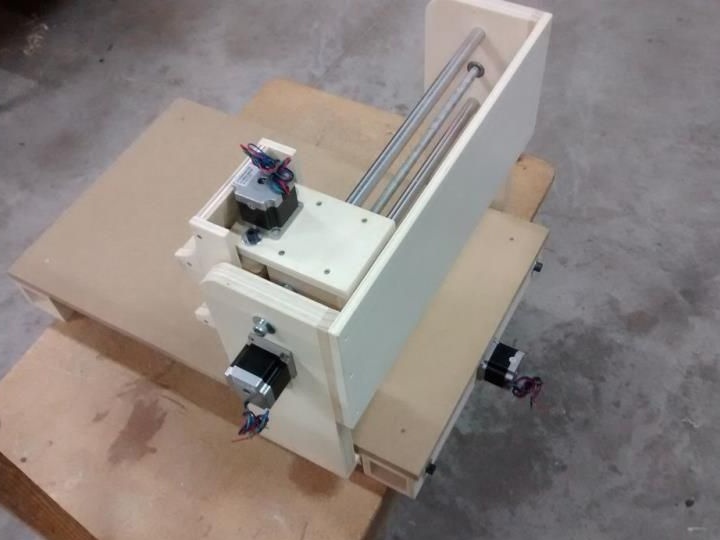
Trinn tre Lag Z-aksen
Z-aksen er opprettet akkurat som de to foregående. På grunn av denne aksen er det en vertikal bevegelse av arbeidslegemet, som mater verktøyet.











Trinn fire Montering
Etter at alle elementene allerede er produsert, kan maskinen dessuten settes sammen, og denne prosessen er ikke komplisert. For å koble elementene brukes bolter med muttere. Maskinens dimensjoner kan varieres, alt avhenger av personlige behov.Hvis noen elementer brytes sammen under monteringsprosessen, trenger du ikke bruke lim for å reparere dem, er det best å produsere elementet på nytt. I dette tilfellet vil nødvendig stivhet av elementene bli gitt.


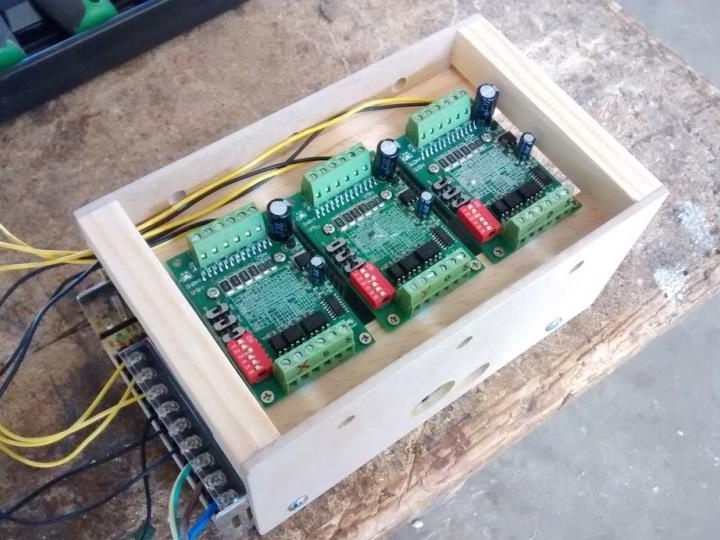
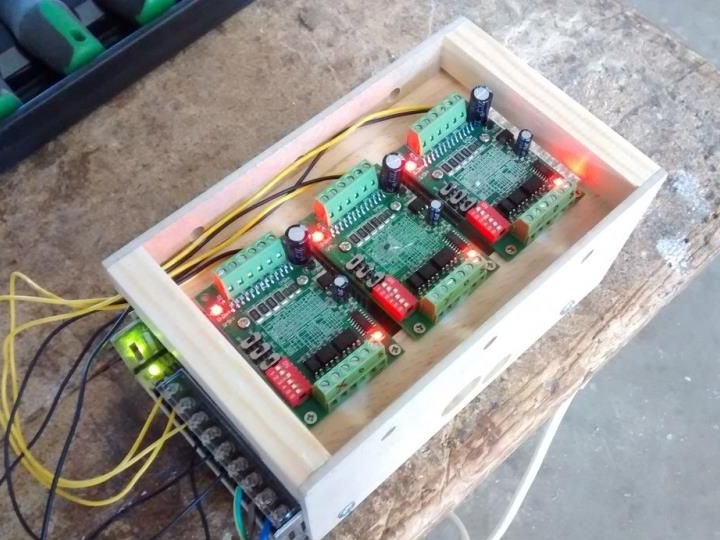
Trinn fem Den elektroniske delen av enheten
Når den mekaniske delen er montert, kan du gå videre til prosessen med å koble til elektronikken. Du må koble Arduino med drivere og trinnmotorer. Hver driver trenger en strømkilde for å fungere. Forfatteren brukte en 24 V 15 A. Strømforsyning. Når det gjelder sjåføren, er den allerede valgt individuelt, avhengig av motoreffekten. Motorspoler og polene deres er angitt med bokstavene A +, A-, B +, B-.

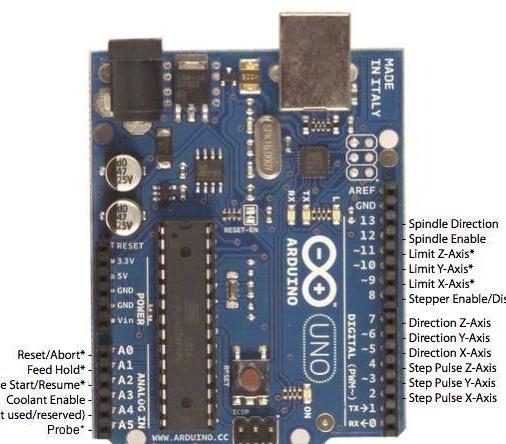



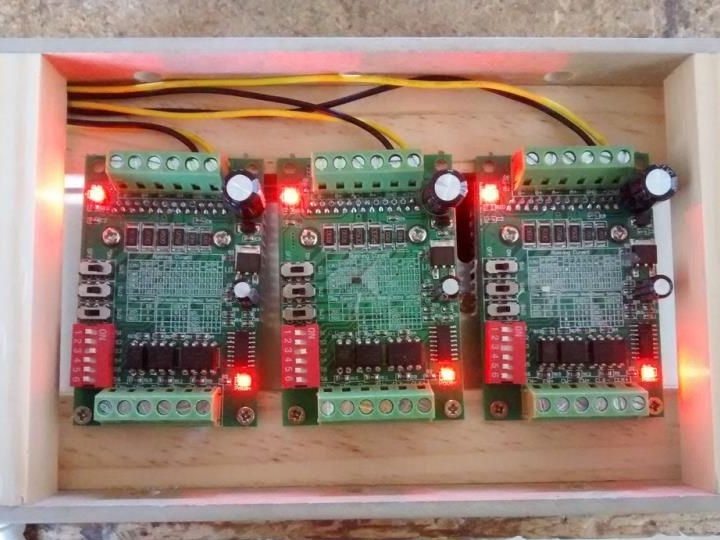

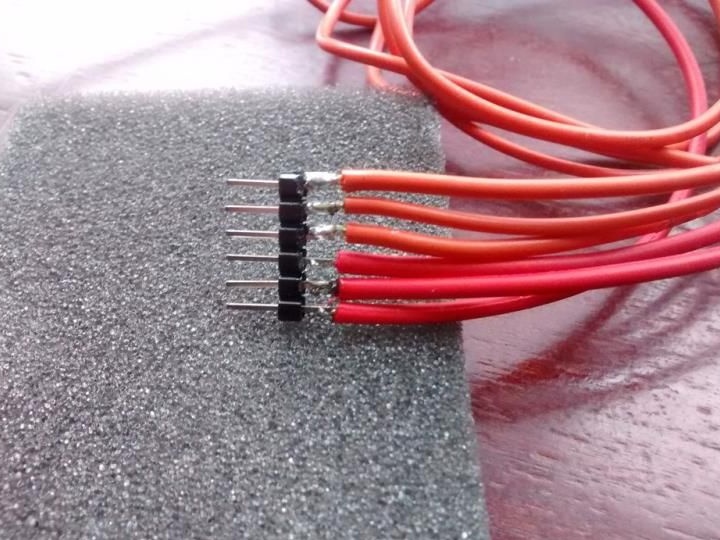
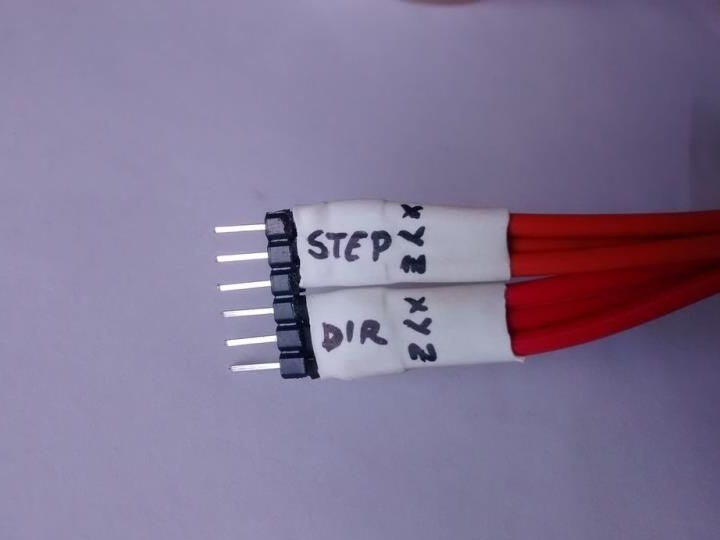

CLK + -utgangen må være koblet til tappestiften på Arduino. CW + -stiften må være koblet til retningsnålen. Vel, CLK- og CW må kobles til GND-pinnen. Kontakter EN + EN- brukes ikke.
Trinn seks Programvaredelen av enheten
Neste trinn er å laste ned programvaren som vil kontrollere maskinen. Prosessen er ikke komplisert, du må laste ned koden ved å bruke XLoader-programmet på Arduino-brettet. Etter det må du åpne GCodeSender for å koble Arduino-brettet til en datamaskin. Etter det vil brettet være klart til å kontrollere CNC-maskinen.
Det er alt, maskinen er klar, du kan teste den i praksis. For å stille inn nødvendige parametere for å behandle objektet, må du bruke tegninger fra CAD-programmet. Deretter, med CAM-programmet, genereres G-koden. For disse formålene er det praktisk å bruke MasterCam X7-programmet. Den har allerede både CAD og CAM.