

Å lage en slik robot med egne hender vil ikke være vanskelig og til og med interessant. Resultatet er et veldig interessant apparat som vil oppføre seg som en levende skapning. Alt dette takket være to små motorer, det er de som driver roboten. Ved å endre angrepsvinkelen til motorakslene, kan du gjøre roboten raskere eller saktere. Du kan også eksperimentere med forskjellige tips som kan bæres på motorakselen.
Materialer og verktøy:
- to små motorer (3 volt, finnes i leketøy til barn);
- holder til batterier (du kan gjøre det selv eller trekke den ut av den gamle fjernkontrollen, lommelykten, etc.);
- to brytere av typen SPDT (de kan fås fra en gammel datamus);
- to små og ett stort binders;
- et lite hjul fra leketøyet;
- tynn ledning

Produksjonsprosess:
Første trinn. Lodding ledninger
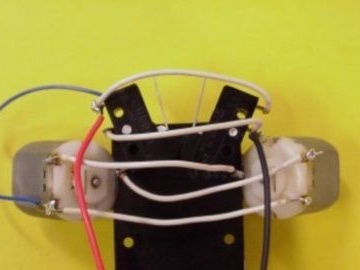
Først av alt må du klargjøre ledningene og lodde dem til alle elektroniske komponenter, slik at det senere er praktisk å koble nodene. Ledningene må kuttes i en lengde på 6 cm og fjernes fra endene med ca 1 cm. Nå må du lodde to ledninger til motorene og bryterne. Ikke glem å lodde de to ledningene til kontaktene til batteriholderen. Andre ender av ledningene er fortrinnsvis fortinnet.

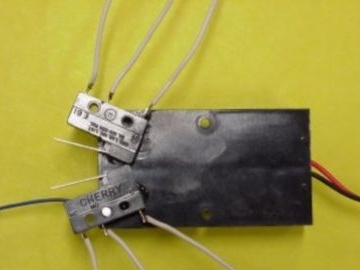
Trinn to Innstillingsbrytere
For å stille bryterne må batteriholderen snus opp ned. Nå må du lim bryterne med lim til batteriholderen. Som et resultat bør bokstaven V dannes.
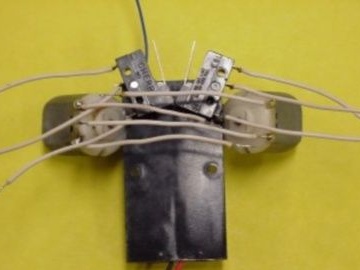
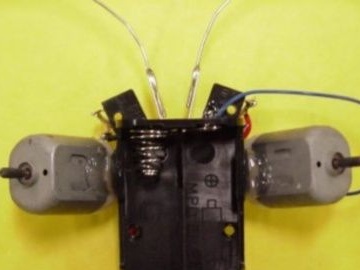
Trinn tre Motorinstallasjon
Motorene må festes til batteriholderen i en vinkel, som indikert på bildet. Vinklene på begge sider må være de samme, ellers roboten vil ikke fungere ordentlig. Motorakslene må hvile mot veien. Motorer kan monteres med lim.

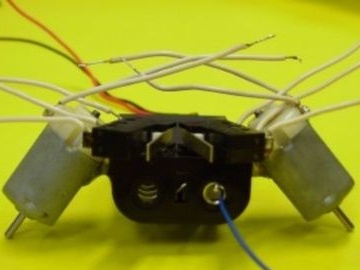
Trinn fire Montering av stabilisatorhjulet
Stabilisatoren er nødvendig for å kunne hjemmelaget produkt sto flatt på veien. For å lage et hjul kan du bruke en rulle fra en båndopptaker eller et hjul fra et leketøy. Når det gjelder “pluggen”, er den laget av et langt binders eller en streng.Avslutningsvis fester stabilisatoren seg jevnt på batteriholderen.

Trinn fem Kabelforbindelse
For at roboten skal fungere korrekt, må alle ledninger være koblet tydelig i henhold til ordningen. Kretsen kan sees på bildet.
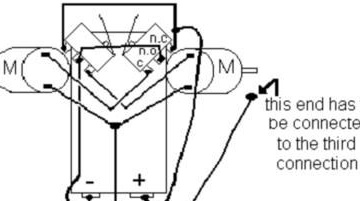

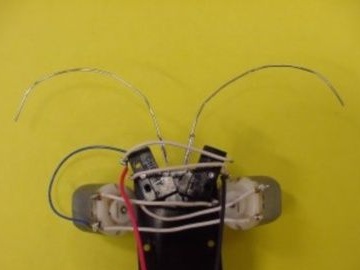
Trinn seks Lage en bart til feilen
Barten vil fungere som et hjul for billen, så snart et hinder møtes på vei, vil barten slå på bryterne, og så vil motorene vri roboten i en annen retning. Når bryteren er aktivert, slås en av motorene av og en slags differensial utløses. Hvis begge bryterne er aktivert, stopper roboten helt. Barten er laget av små binders, de må limes forsiktig på knappene på bryterne.

Syvende trinn. Endelig revisjon og testing av roboten
I sluttfasen må gummispisser monteres på motorakslene, de er nødvendige for bedre grep. De kan være laget av cambric.
Det er alt, roboten er klar. Du må kjøre den på en glatt overflate, for eksempel på et bord eller linoleum. Siden labbene til billen er for små, vil den ikke krype langs teppet, for dette vil det være nødvendig å øke spissene på motorakslene.
I fremtiden kan roboten oppgraderes etter eget skjønn. For eksempel kan han lage LED-øyne som lyser når du er i kontakt med en hindring.