

Roboten DIY vil være et flott leketøy for barn, også med det kan du leke familie eller venner. Essensen av roboten er som følger. Det er en boks med en bryter. Så snart noen klikker på en bryter på en boks, begynner en dør å åpne seg, hvorfra en hånd kommer ut og setter bryteren tilbake til sin opprinnelige tilstand. Til tross for robotens ytre enkelhet, ser faktisk alt dette ganske morsomt ut.
Grunnlaget for å lage en robot er en krets Arduino. Det er også noen mekaniske elementer som vil bli diskutert nedenfor. La oss vurdere mer detaljert hvordan kan gjør det selv sett sammen en slik robot.
Materialer og verktøy for produksjon:
- Arduino-brettet, alt med PWM-utganger vil gjøre;
- servomotorer, to deler (egnet modellen Futaba - S3003, kraften til en slik motor er nok til å åpne døren, enheten produserer opptil 3,2 kg / cm kraft);
- batterier;
- switch type SPST eller SPTT;
- en bryter for å kontrollere batteristrøm;
- du trenger en knapp for å starte Arduino på nytt;
- ledninger, hoppere og andre småting.

I tillegg trenger du i tillegg en girkasse (egnet for radiostyrte biler), et brett for en elektrisk motor kalt Arduino motorskjerm, en RC servomotor. Disse komponentene er nødvendige for å få boksen til å bevege seg, som forfatteren.
For å redusere støynivået under drift av enheten, trengs en elektrolytisk type kondensator med en nominell verdi på 10 mF, en 10K motstand og en 74HC04 inverter.
Produksjonsprosessen til roboten:
Første trinn. Hvordan lage en boks
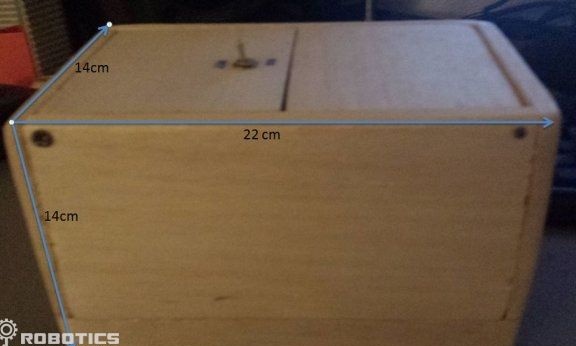
For å lage en boks, det vil si en robotkropp, må du finne kryssfiner eller kork. I tillegg trenger du et kraftig lim for liming av tre. Det er viktig å forstå at jo mer strukturen veier, jo mer energi vil bli brukt. Når det gjelder størrelsen på esken, er den 22cm x 14cm x 14cm.
Trinn to Skjematisk diagram elektronisk deler
Toppen av roboten inkluderer et Arduino hovedkort, to servoer og en bryter. Når det gjelder kretsen, som er ansvarlig for støymengden, kan den erstattes med en vanlig motstand.
Servo-stasjoner drives gjennom den femte pinnen på Arduino-brettet. Når det gjelder signaltrådene, er de koblet til kontaktene 9 og 10. Takket være disse PWM-kontaktene styres servomotorenes rotasjonsvinkel. Dette er en vinkel fra 0 til 180 grader.
Den røde knappen er nødvendig for å starte Arduino på nytt.
Nederst på kretsen er Arduino motorskjermtavle.På brettet kan du se to kanaler, A og B, takket være dem kan du om ønskelig koble til to motorer samtidig. Hovedoppgaven til dette brettet er at du kan programmatisk stille inn rotasjonshastighet, retning, brudd for hvilken som helst kanal på motorene. Hvis du ser på diagrammet, brukes kanal B, mens kontakt 13 bestemmer retningen, kontakt 11 er hastighet, og kontakt 8 brukes til å kontrollere bremsene.
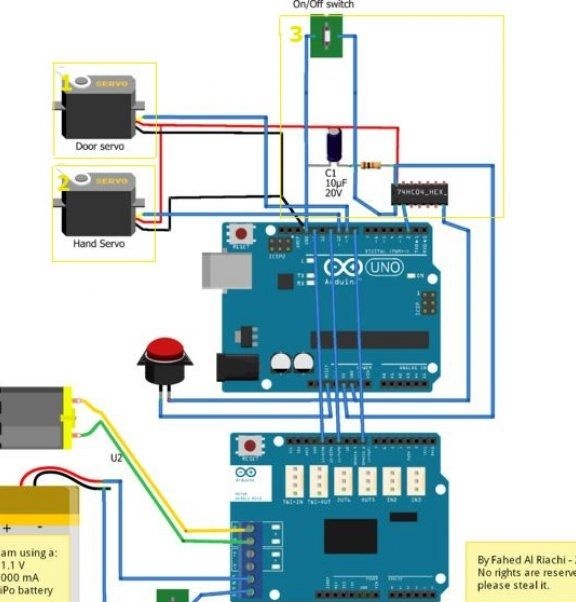
Strømkilden er et 11,1 / 1000 mA-batteri, den kobles til Arduino-motorskjermkortet. Hvis det ikke blir brukt, er batteriet direkte koblet til hovedkortet.
Trinn tre Motorinstallasjon
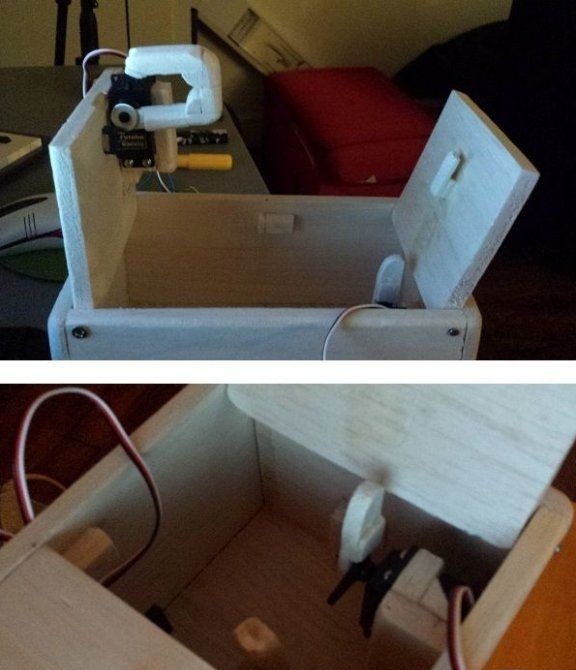
Servostasjonen og hendene er installert eksperimentelt, du må sjekke i praksis om mekanikken fungerer som den skal. For å sjekke motorens avviksradius, kan du bruke Arduino IDE-programmet.
For fremstilling av hånd tatt trevirke av noe slag. Hovedsaken er at den er lett, da ellers vil energiforbruket øke. Når det gjelder størrelsen på hånden, justeres den under installasjonen, velger ønsket lengde, oppnås ønsket effekt.
Dekk skyveren og hånden er montert slik at de ikke berører servomotoren under drift.
Trinn fire Vi kobler servomotoren og bytter til Arduino
Ved å bruke ledninger og hoppere, må du koble alle elektroniske elementer til hverandre i henhold til den spesifiserte ordningen. Ledningene må legges slik at de ikke forstyrrer de bevegelige elementene i roboten.
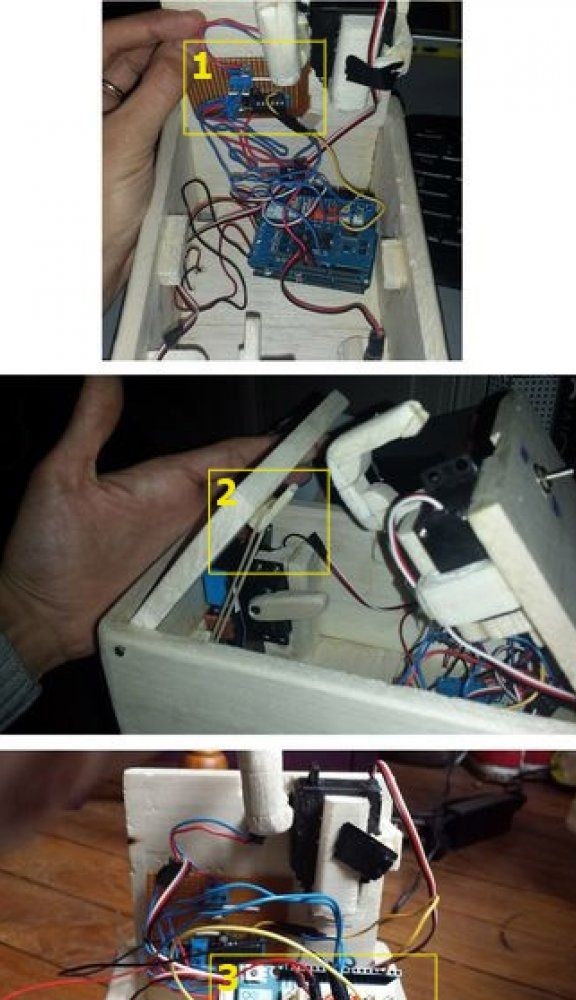
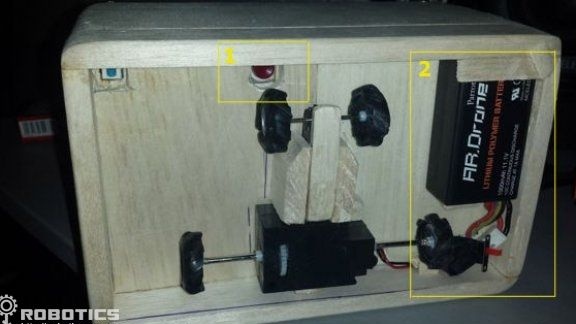
Under nummer 1 kan du se hvordan den er tilkoblet og hvor svitsjekretsen er plassert. Nummer 2 markerer et slikt element som et elastisk bånd, det er nødvendig for at døren skal åpne seg med litt spenning. Nummer 3 indikerer motorskjoldet som er installert på Arduino.
Trinn fem Installasjon av den mekaniske delen for å flytte boksen
Nederst i boksen er et batteri, en motor med hjul, en girkasse, en tilbakestillingsknapp og en bryter for å kontrollere robotens kraft. Før du fester elementene, må du beregne balansen i vekten på esken. For at roboten skal være stabil, i tillegg til den førende aksen, er det installert en annen til.
Trinn seks En annen tilleggsfunksjon
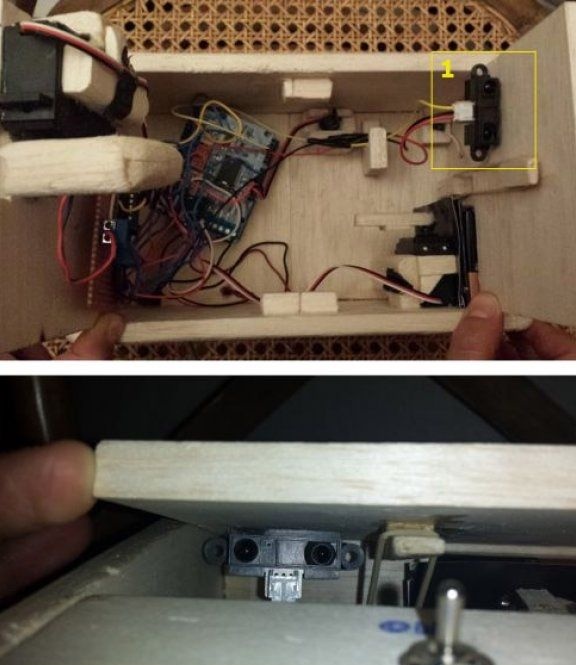
For at roboten skal bestemme bevegelsesretningen, kan den utstyres med en IR-sensor. Når noen prøver å berøre vippebryteren, vil boksen samtidig bevege seg til høyre og venstre. For disse formålene er GP2Y0A21-sensoren passende, den har tre ledninger. Gult må være koblet til den tredje tappen av Arduino, rød til tapp 5, og svart til bakken.
Det er alt, en enkel og samtidig morsom robot er klar. Et slikt leketøy vil gi glede ikke bare for barnet, men også overraske mange voksne.
firmware: