




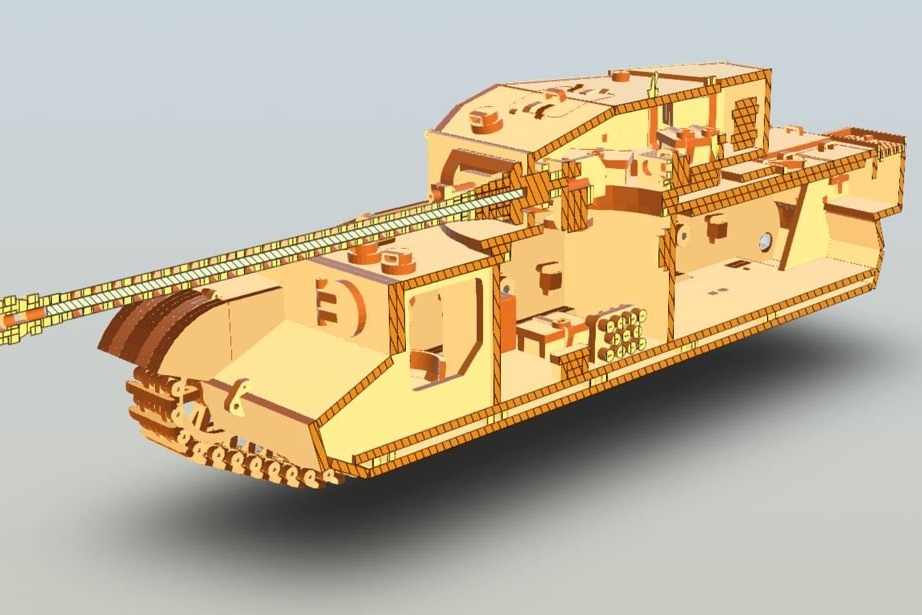
Denne tanken er ikke den første montering av mesteren. Et særtrekk ved denne spesielle modellen er en fjæroppheng, og utstyrer modellen med en motor, vedlikeholdbarhet.
La oss se på en demo.
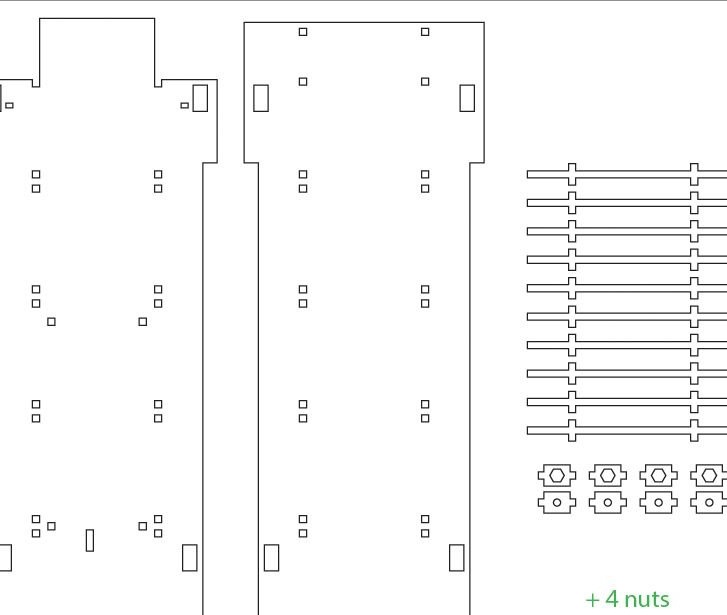
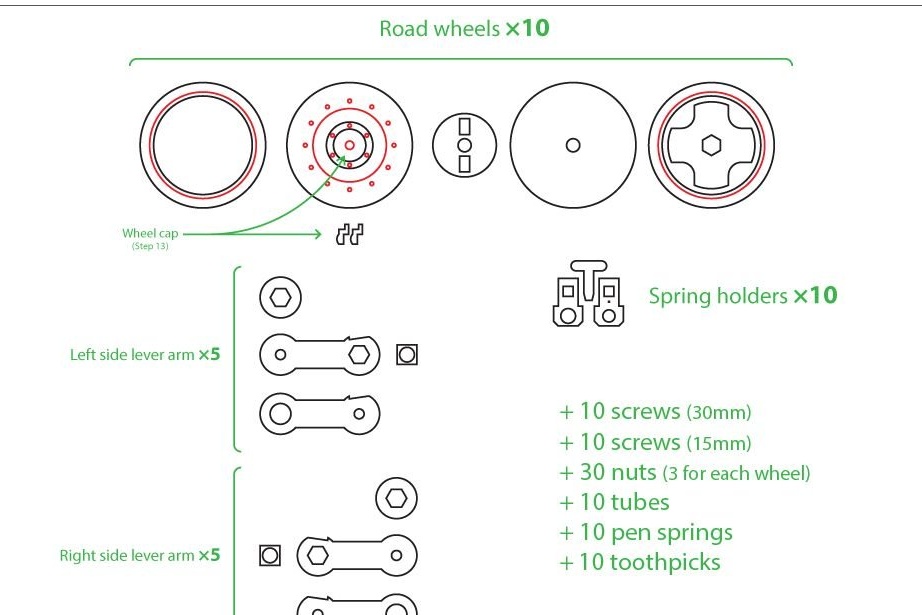
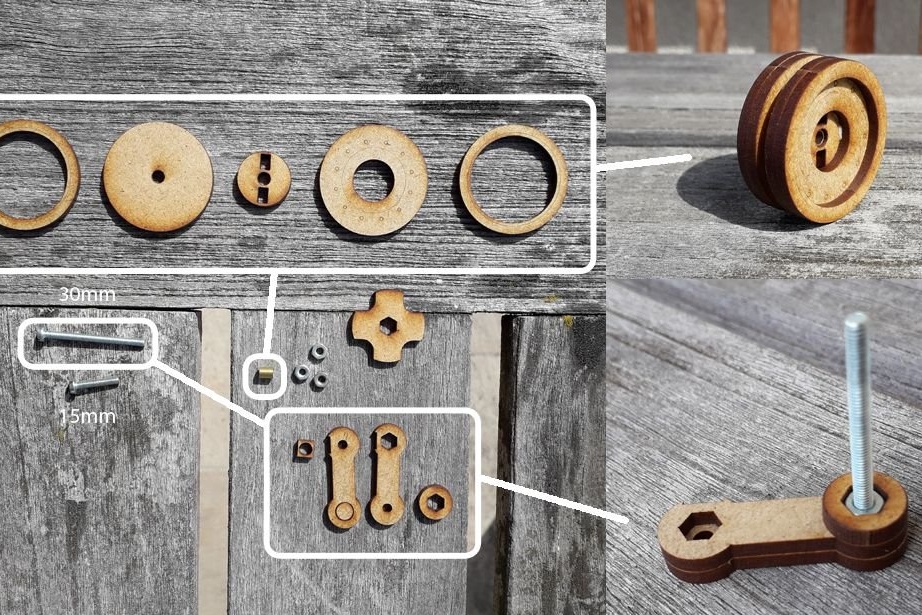
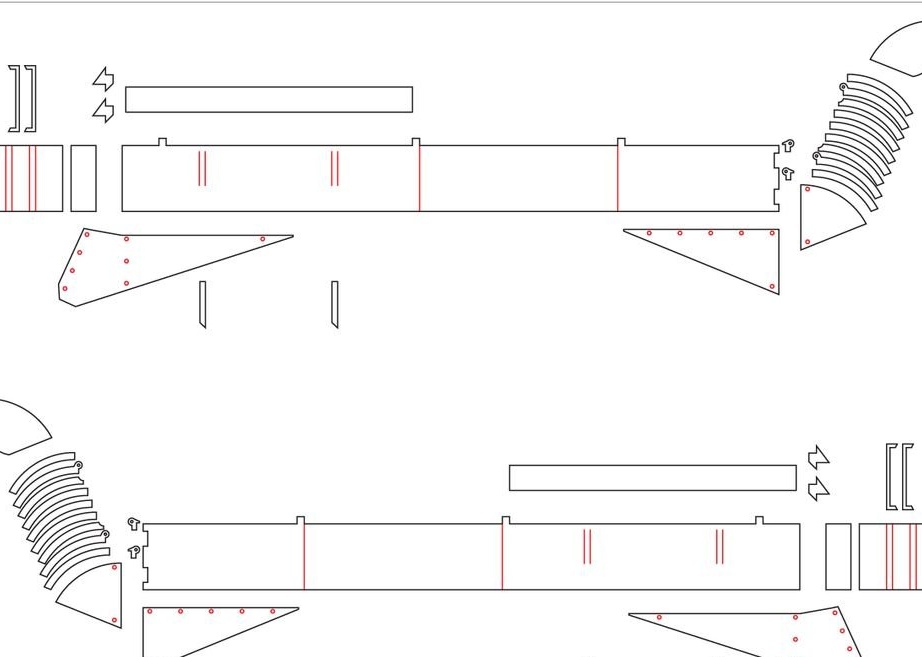
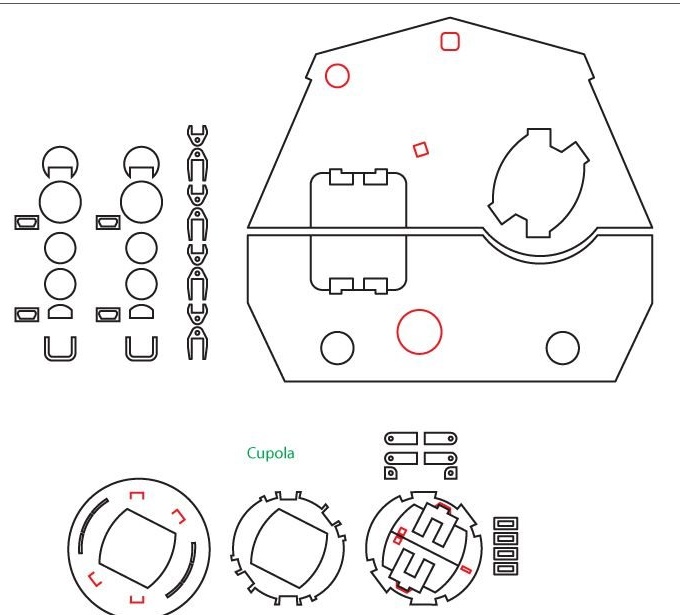
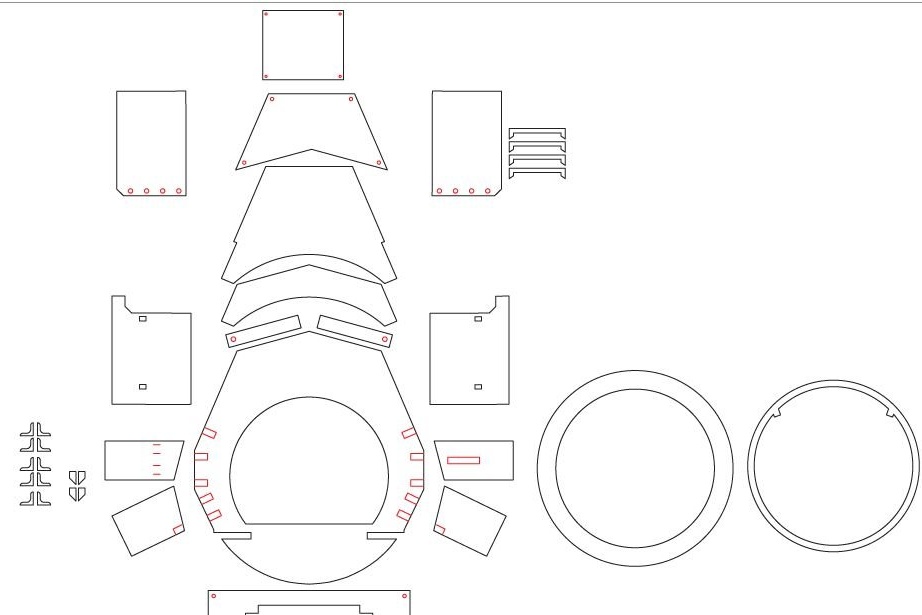
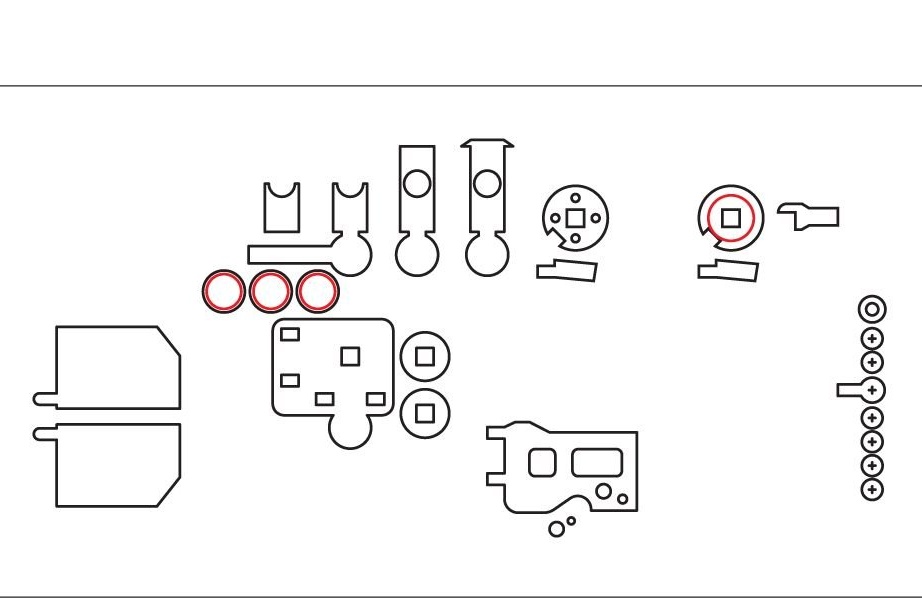
Sakdetaljer kuttes ut på en laserkutter, og filer er tilgjengelige på denne lenken.
I tillegg til kroppsdeler vil følgende være nødvendig
Verktøy og materialer:
- Skruer Ø 3 mm:
-14 stk 15 mm lang,
-10 stk 25 mm lang,
-10 stk 30 mm lang.
-Rør x20 Ø4 mm (Ø3 mm indre diameter);
-Metalltråd Ø 1 mm;
-Ø3 mm gjengestang;
-Fjærer for anheng Ø 4,5 mm og en lengde på 30 mm -10 stk;
- Skruer M4 2 stk;
-Zubochistki;
-Maketnaya bord;
Mikrokontroller ESP8266;
-Koble til ledninger;
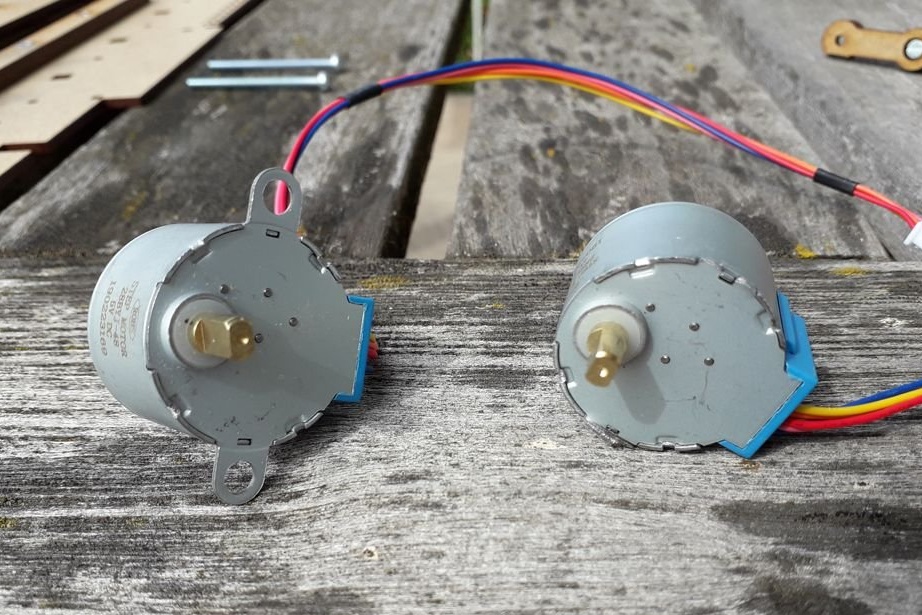
- 28BYJ-48 motor med kontrollkort - 2 stk;
-Batteri 5V;
Trinn én: Gjennomgang
I dette trinnet utsetter mesteren sin modellen tank og indikerer også lenken til stedet der du kan se tanken i demontert form.
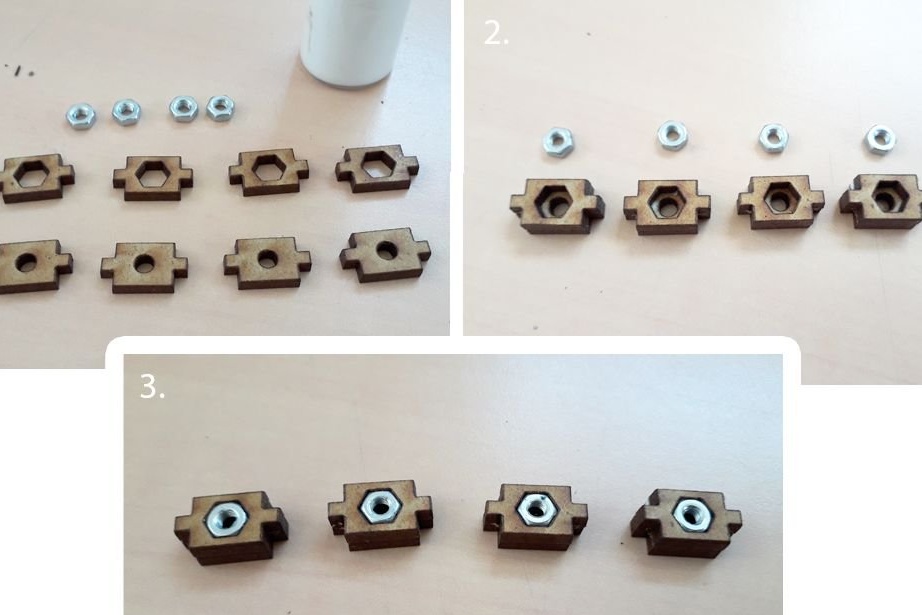
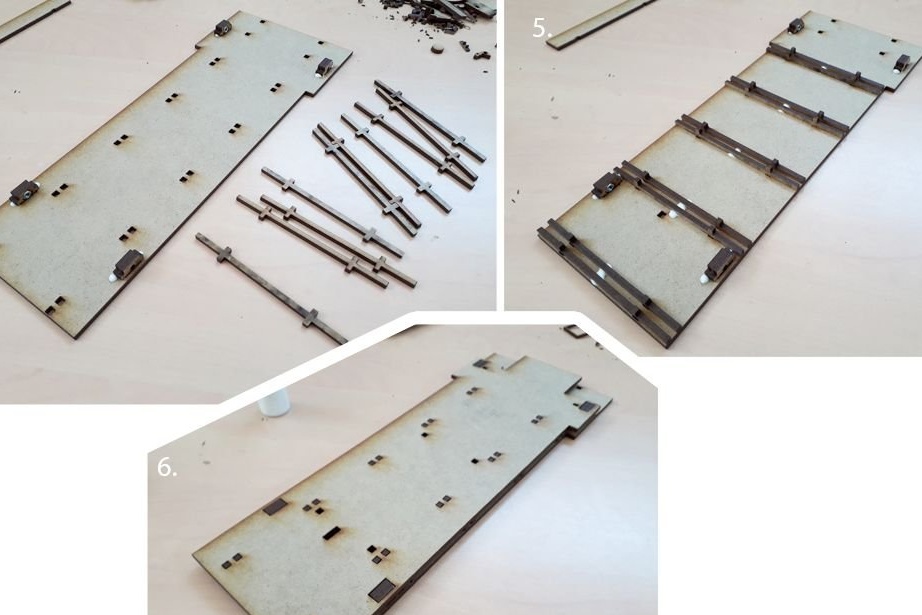
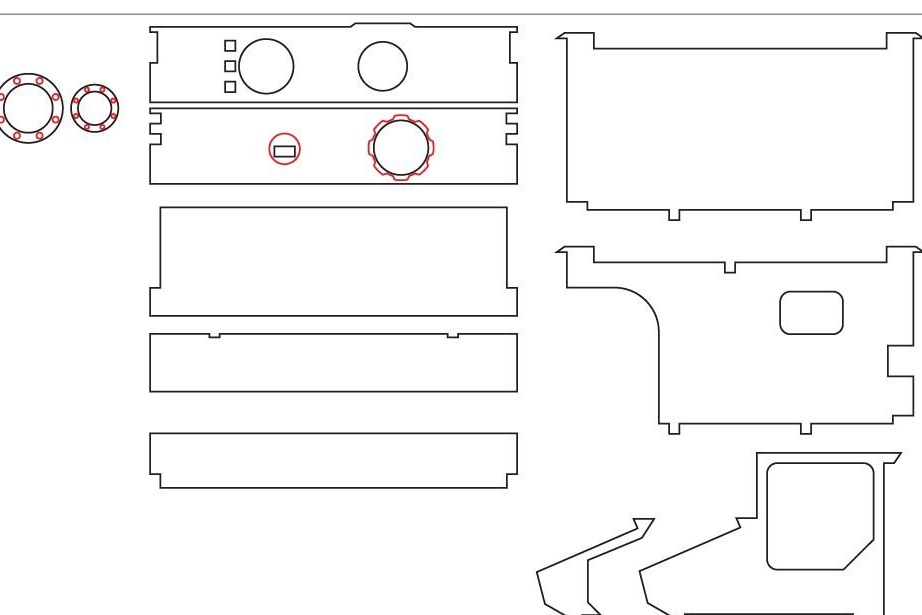
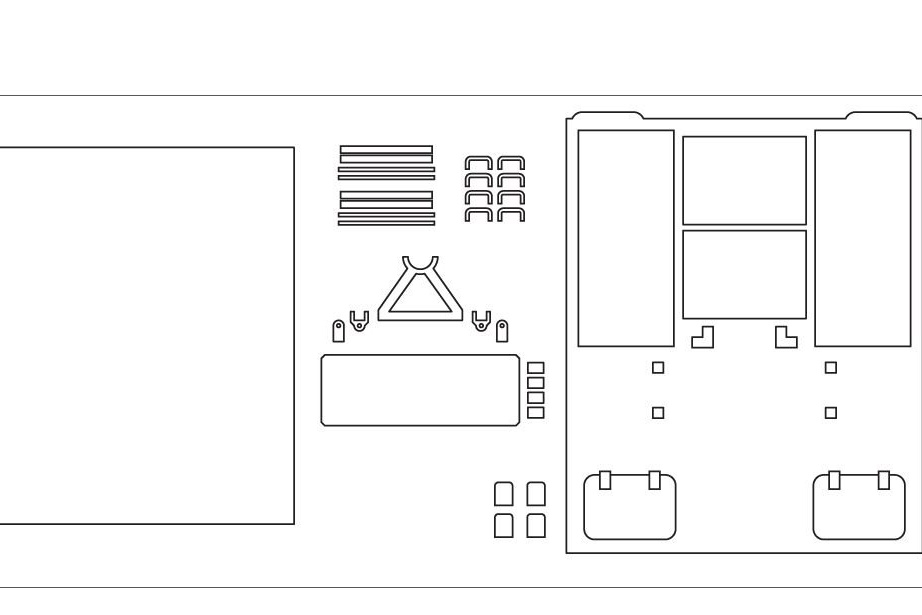
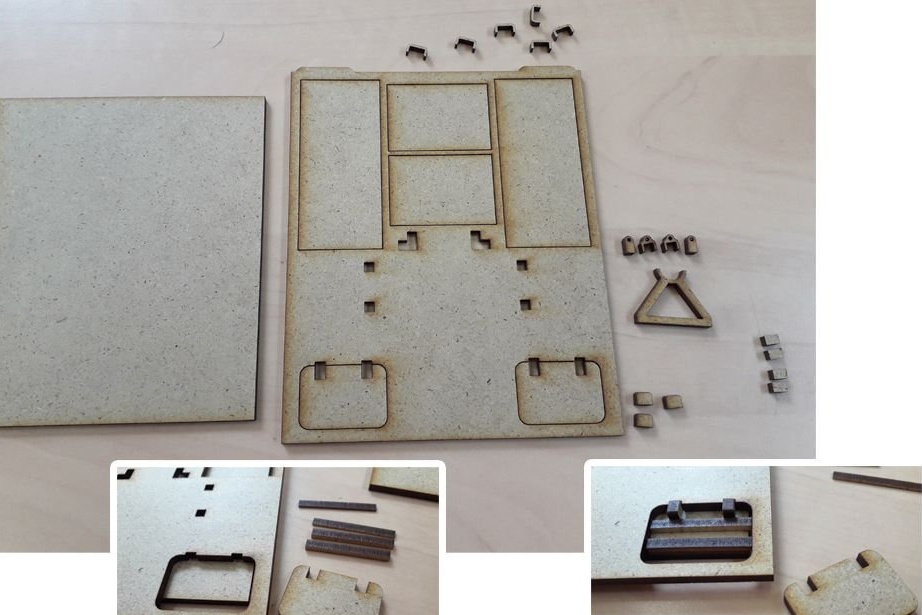
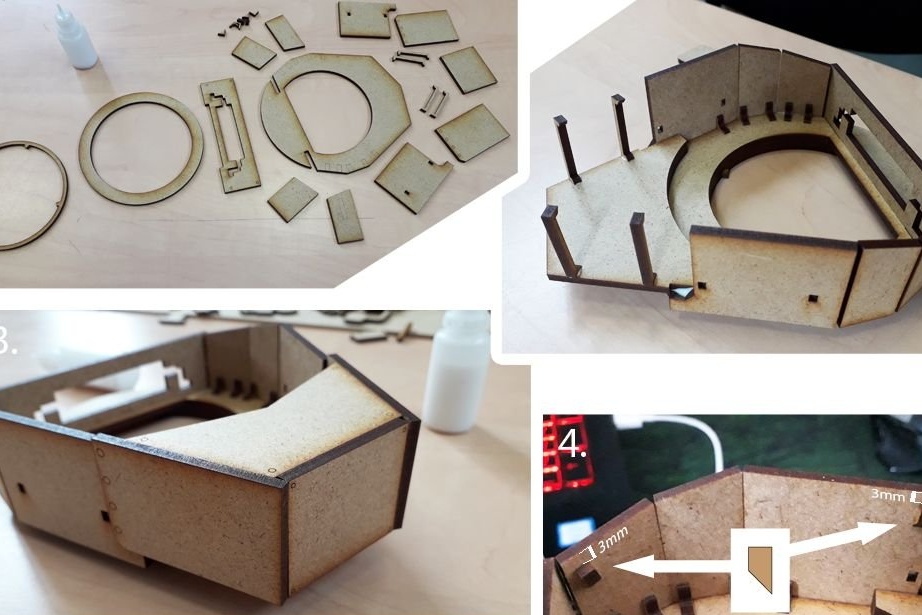
Trinn to: Bunn
Skipsføreren begynner å montere fra bunnen av tanken. Installerer muttere i festene. Festes på sidene av bunnen. Etabler støtter. Setter det andre laget.
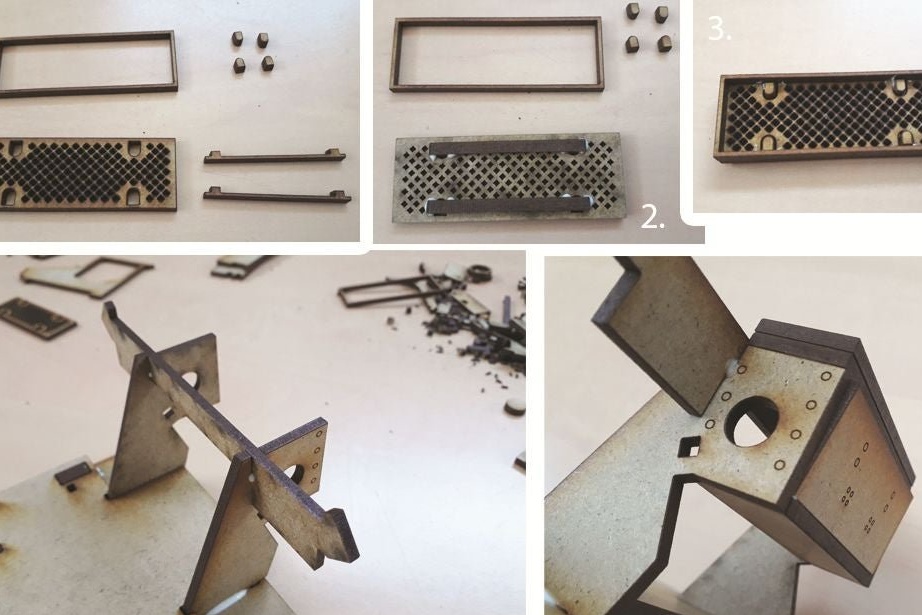
Trinn tre: Sak
Begynner kroppsmontering. Monterer en radiator og en rygg.
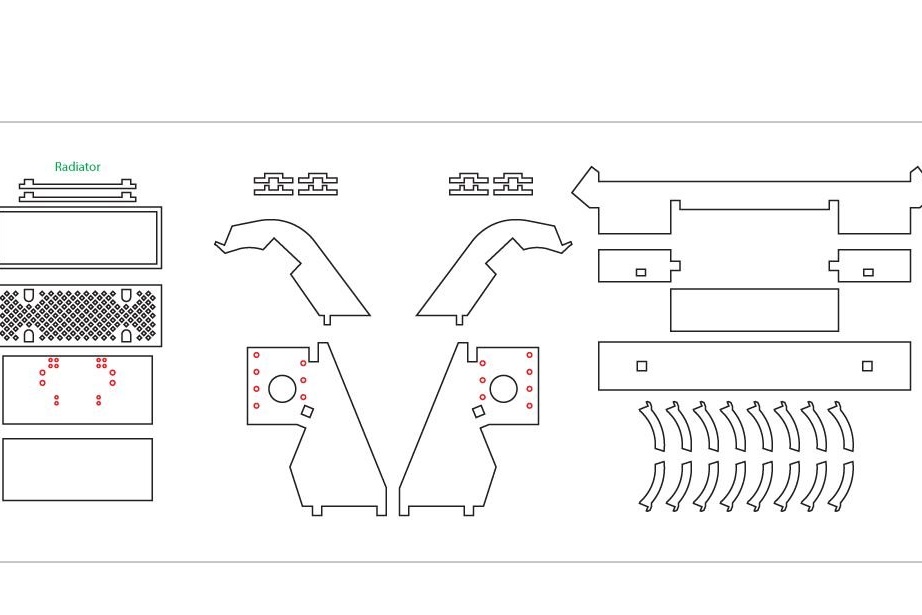
Samler fronten.
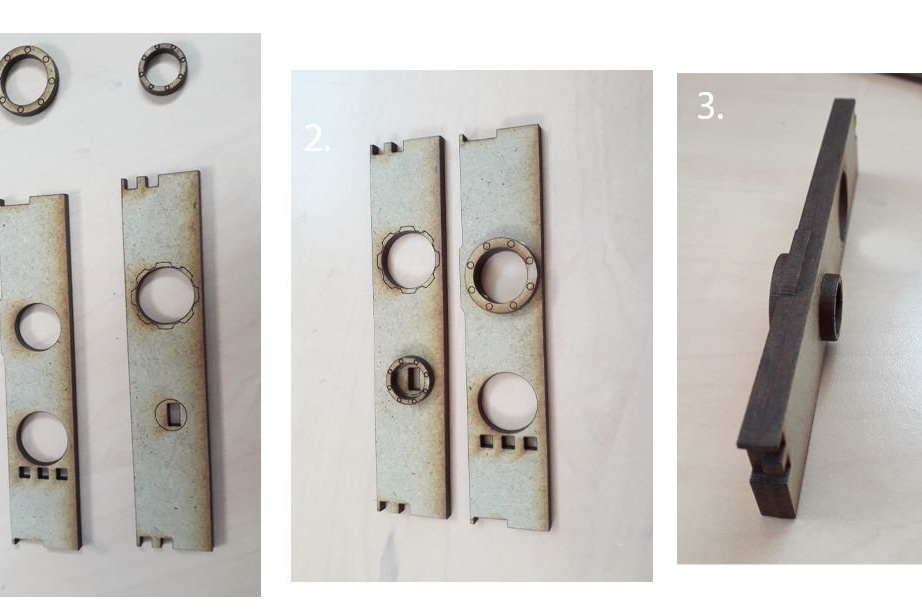
Etter å ha plassert den fremre rustningen, er skroget ferdig. Andre deler blir skrudd på eller limt på den uten liming
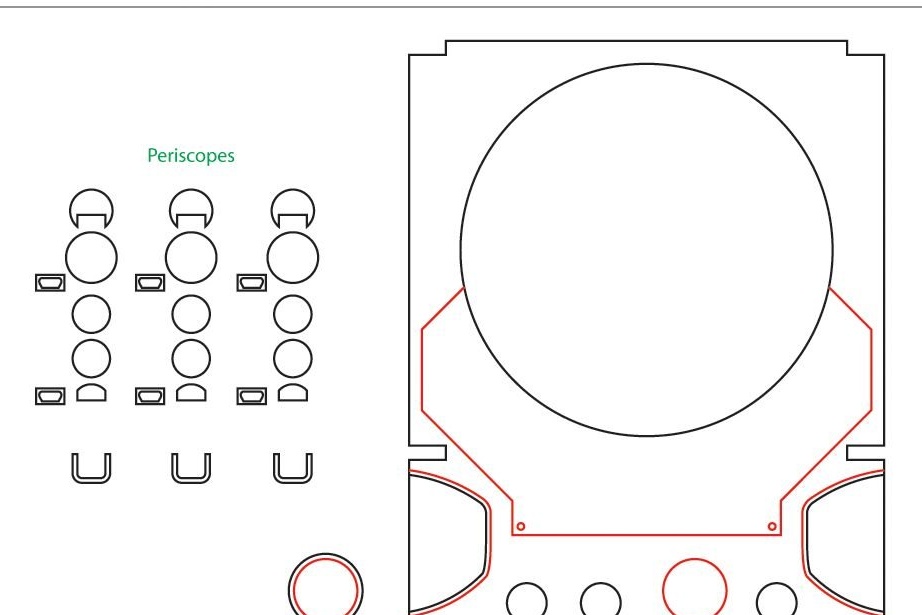
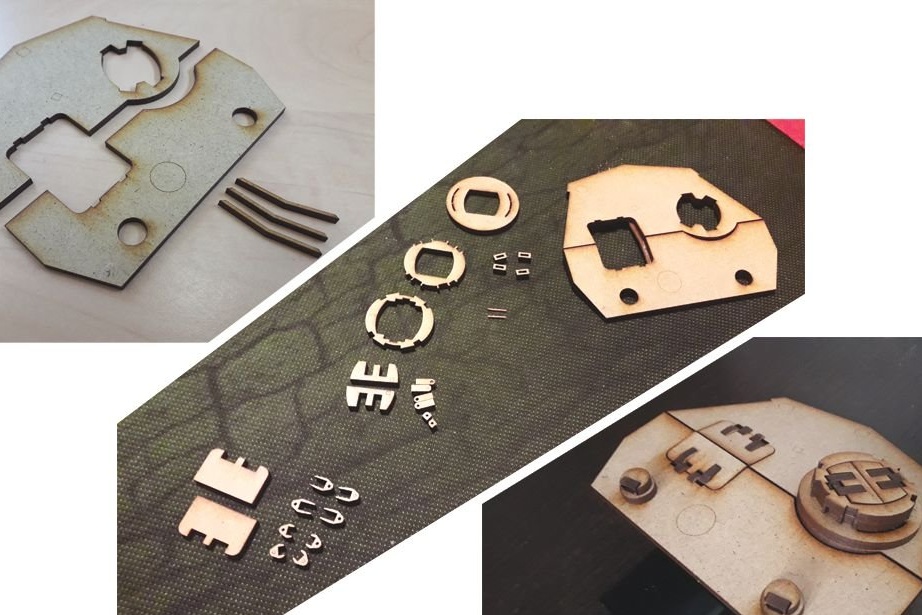
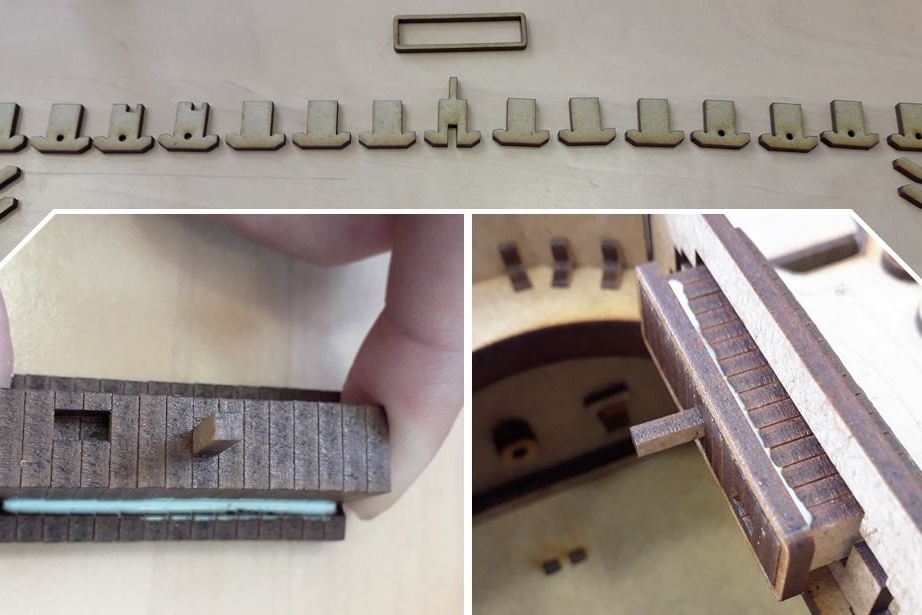
Trinn fire: Tak og periskop
Denne delen er en flyttbar del. Dette gjøres for å ha tilgang til innsiden. Periskopespaken er installert på enden av taket. Periskopet er plassert på taket, men holder seg ikke til det.

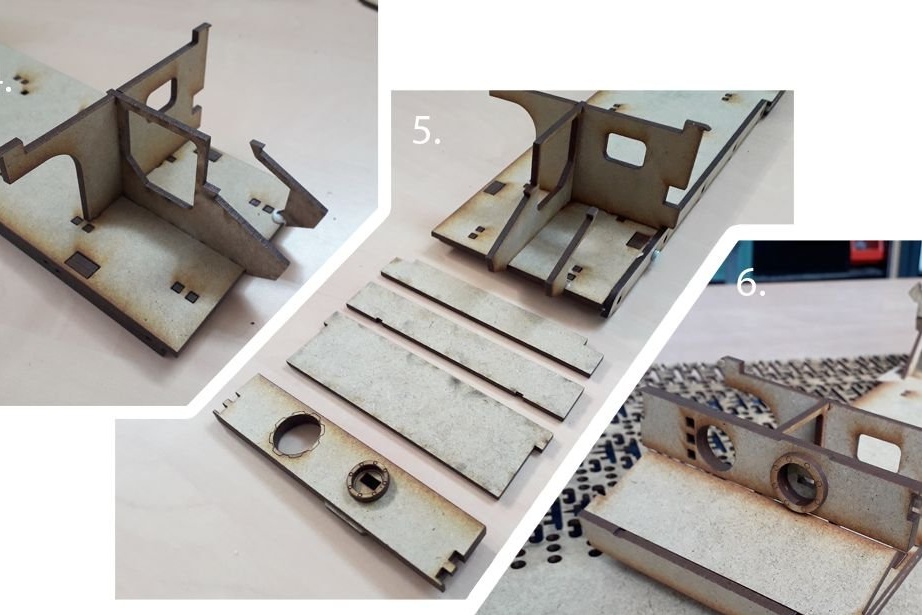
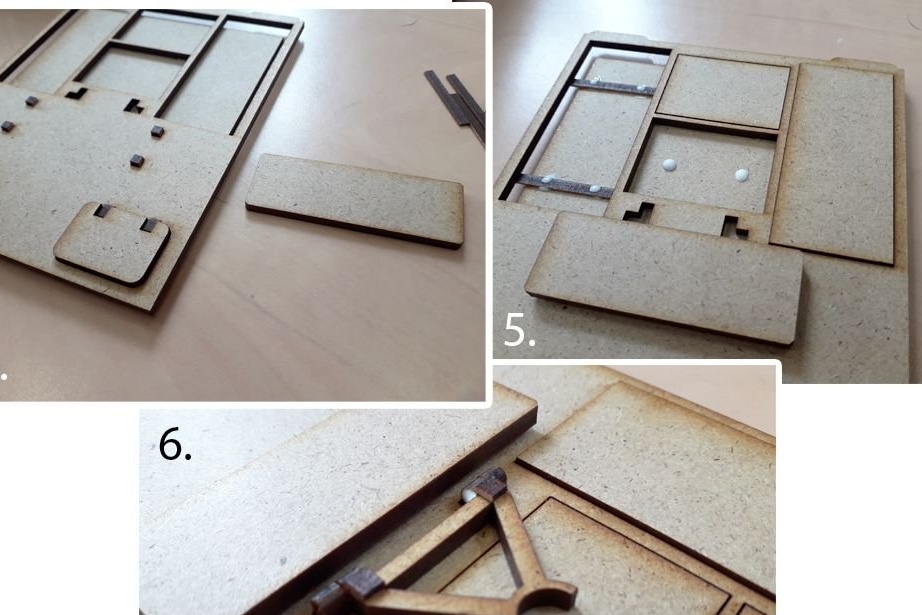
Trinn fem: Side
Opphengsarmer er montert på sideveggen. Den er skrudd fast til dobbeltbunnen med 15 mm skruer ved bruk av 4 muttere som ble festet i første trinn.



Trinn seks: Suspensjon
Monterer og installerer opphengskomponenter. Alle trinn gjenspeiles i detalj på fotografiene. Påfør litt lim på endene av fjærene for feste. Inni fjærene setter deler av tannpirkere. Dette vil forhindre at fjærene spretter ut.

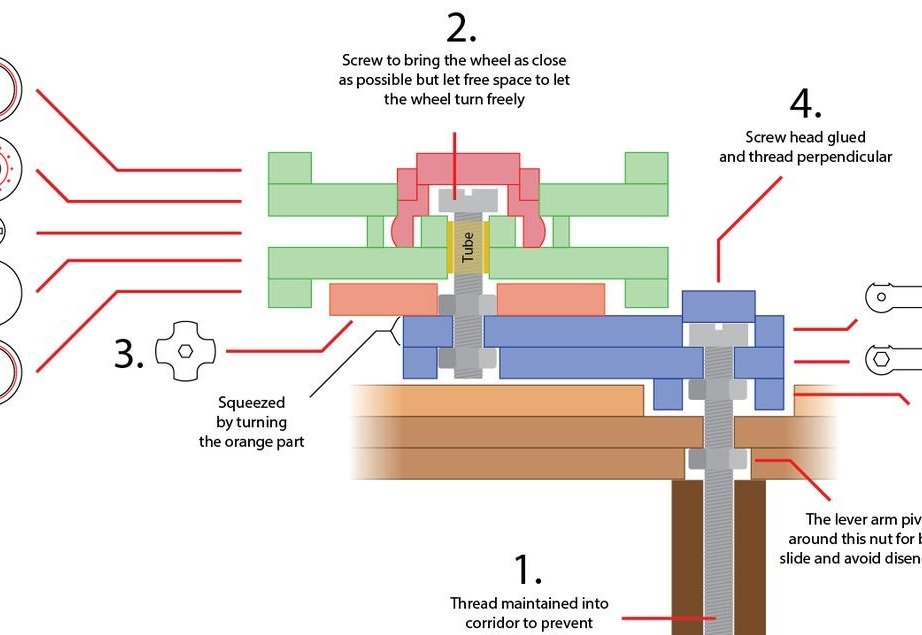
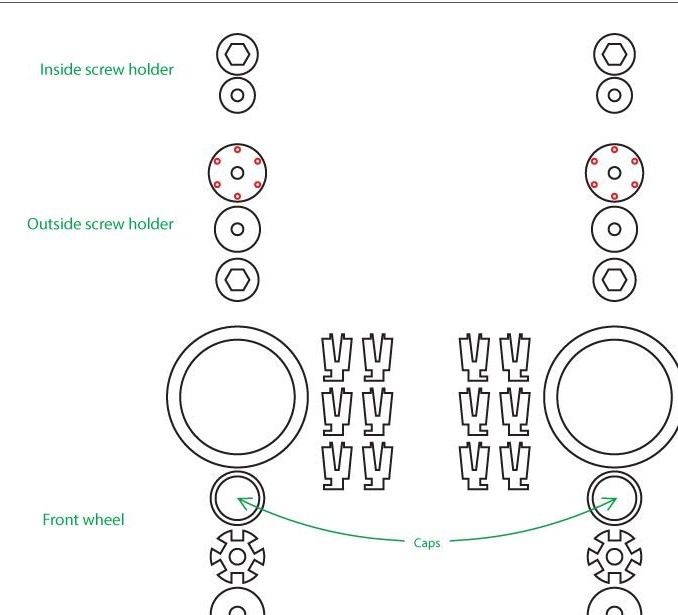
Monterer og installerer det fremre hjulet. Et messingrør og en 20 mm skrue er installert inne i hjulnavet. Deretter lukkes navet med en plugg.

Monterer og installerer heller et hjul.


Monterer og installerer drivhjul. Disse hjulene vil være koblet til motorene som er installert i tankens tank.
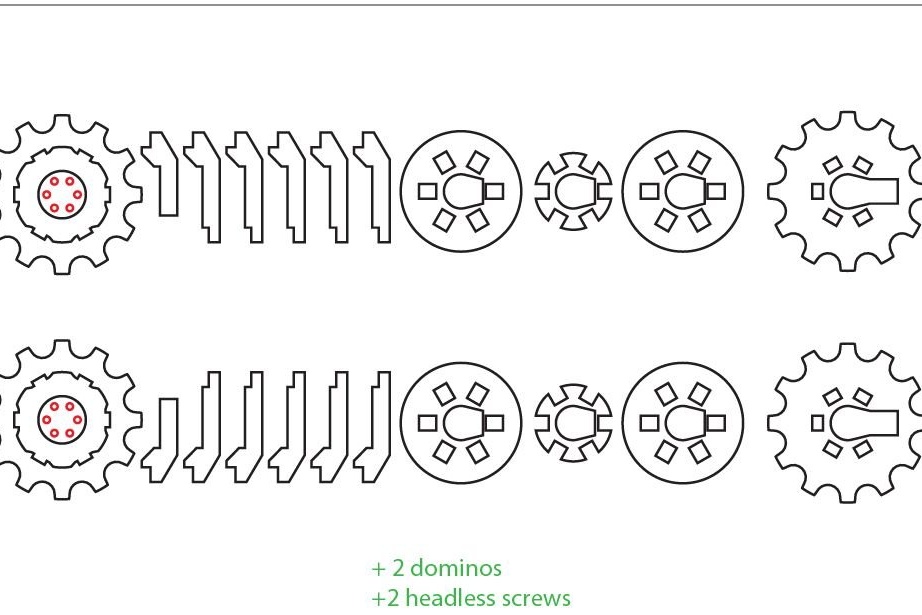
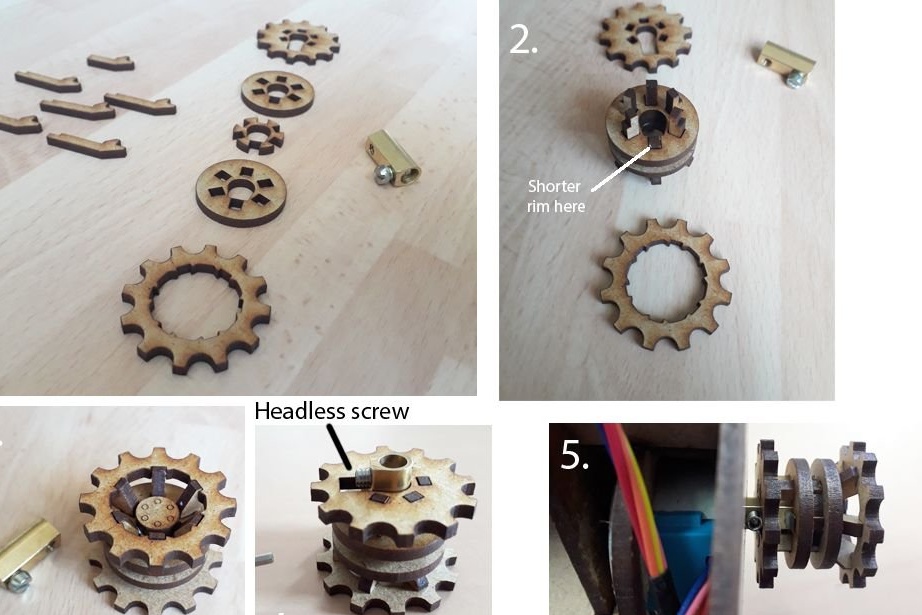
Installerer plugger på hjul.

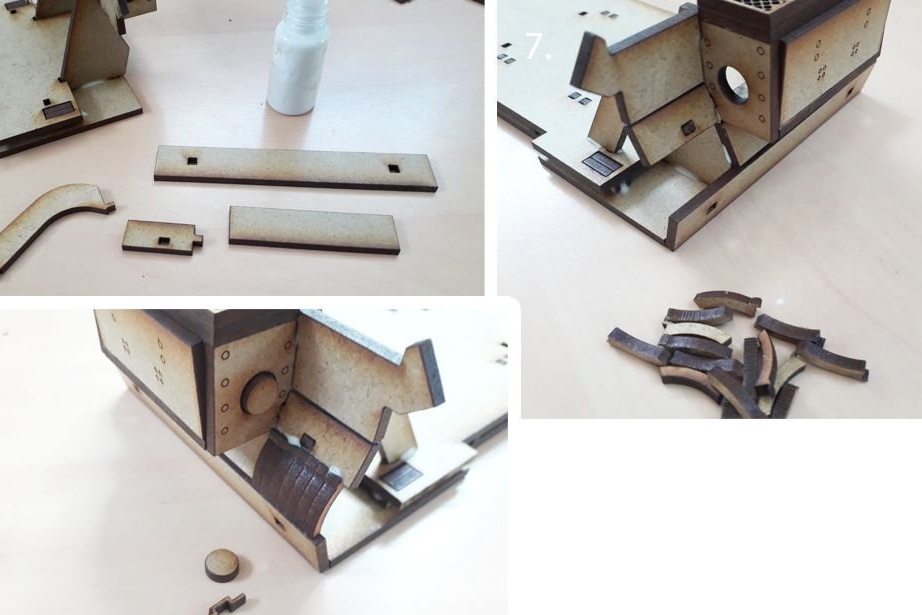
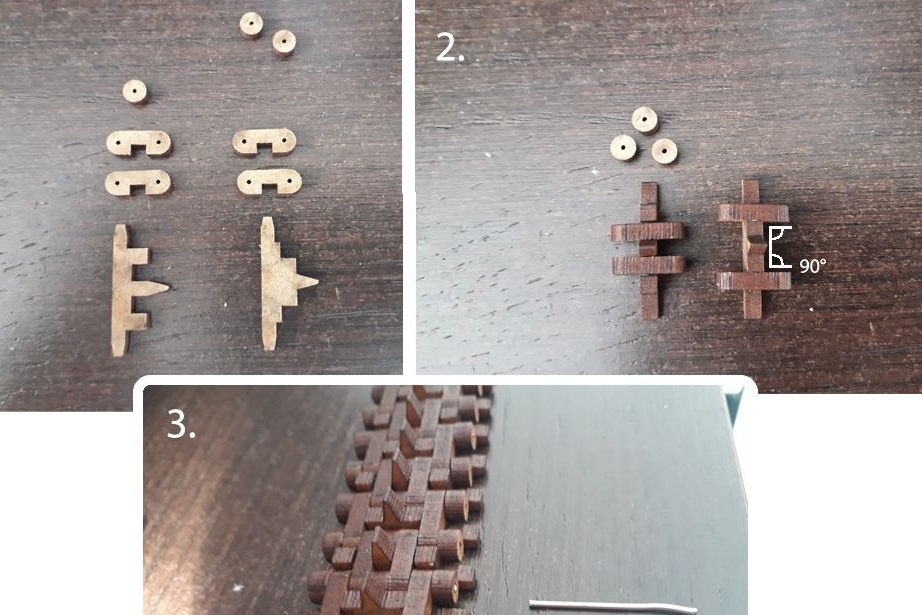
Trinn syv: Spor
Samler larvespor. Sporene er festet sammen med en tynn ledning. På sidene av ledningen er festet med lokker.
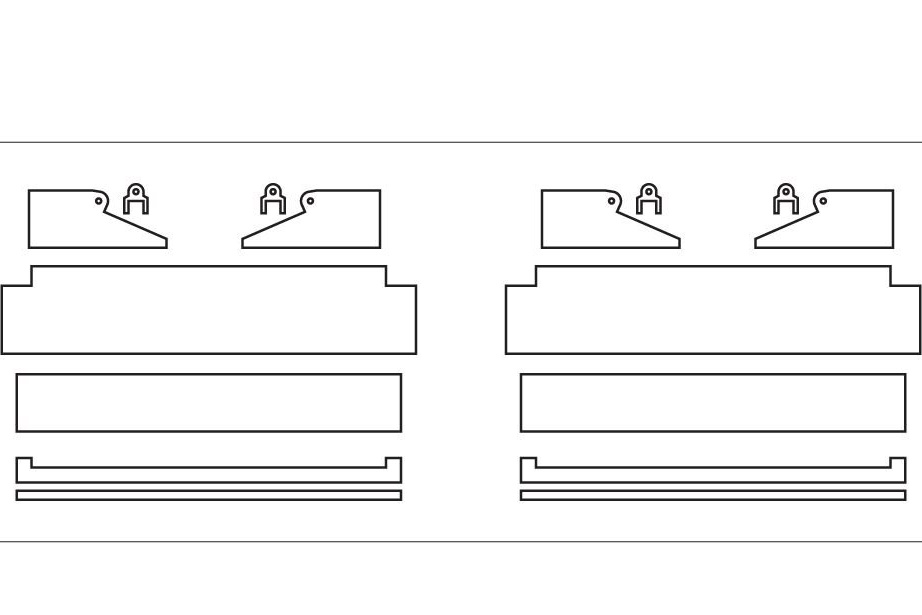
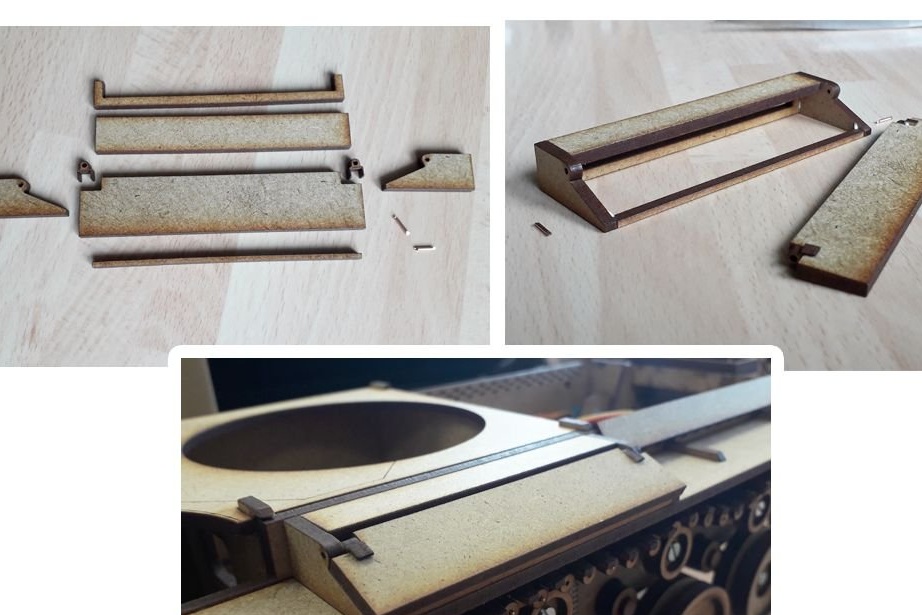
Trinn åtte: Smussbeskyttelse og skuff
Installerer skjold. Klaffenes front er bevegelig og kan løftes opp.


Setter skuffen. Som løkker er trådstykker installert.
Trinn ni: ryggen
Denne delen er plassert bak tårnet, og den vil dekke hele elektronikk.
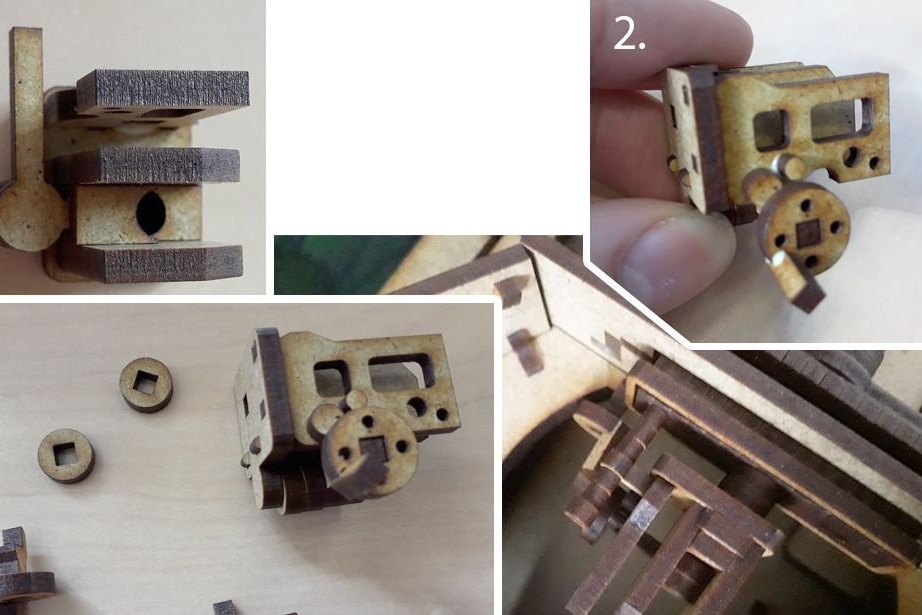
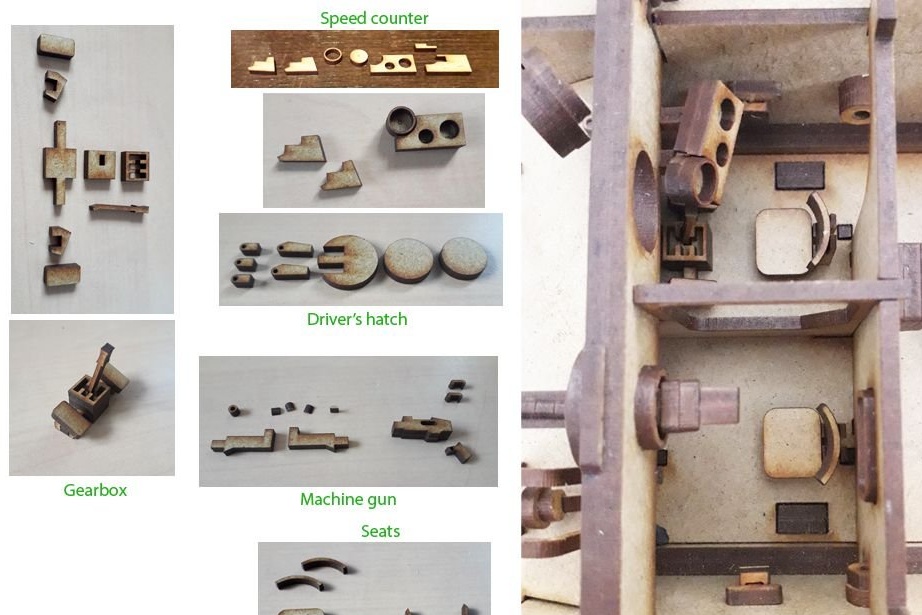
Trinn ti: Tårnet
Samler toppen av tårnet og sideveggene.
Lim pistolfestet.
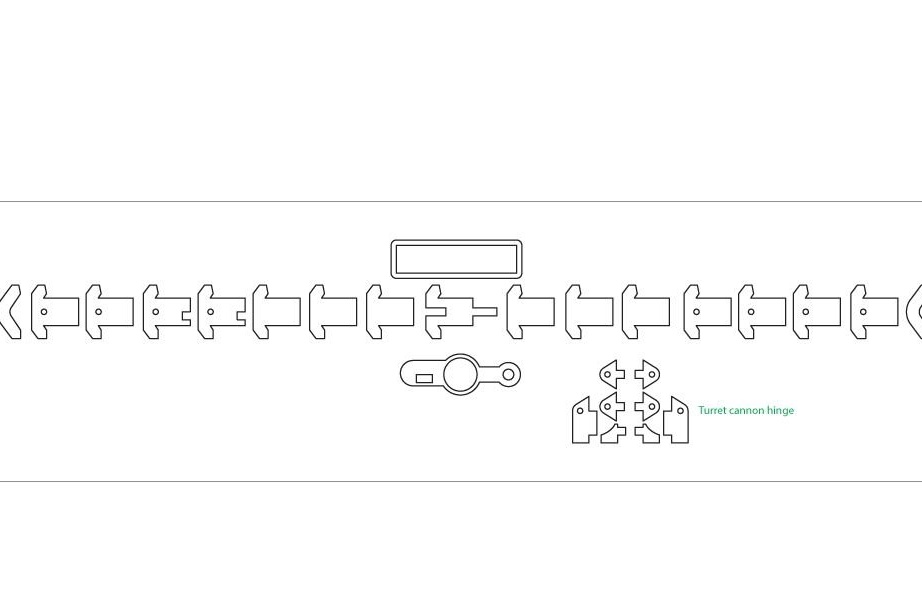
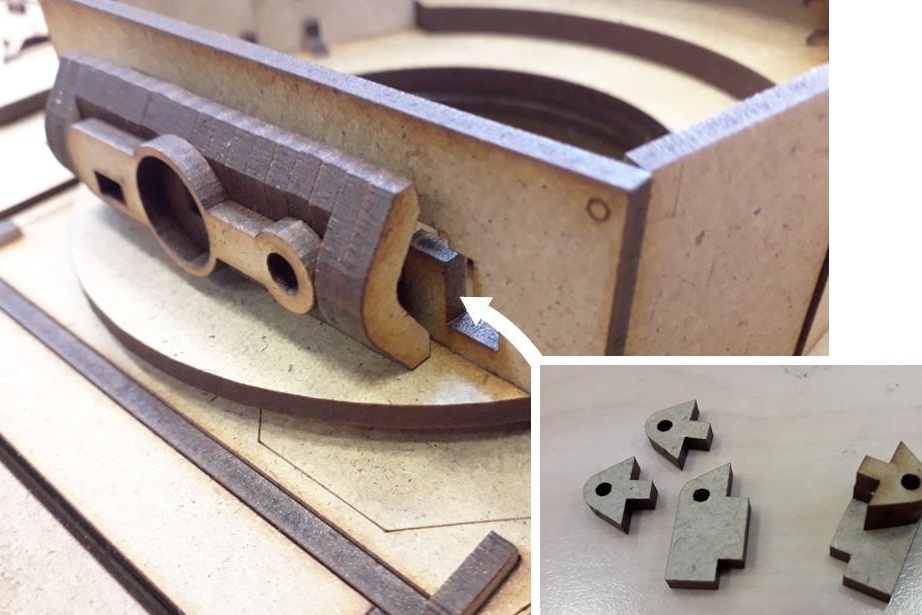
Setter innvendig montering og pistolkontrollmekanisme.

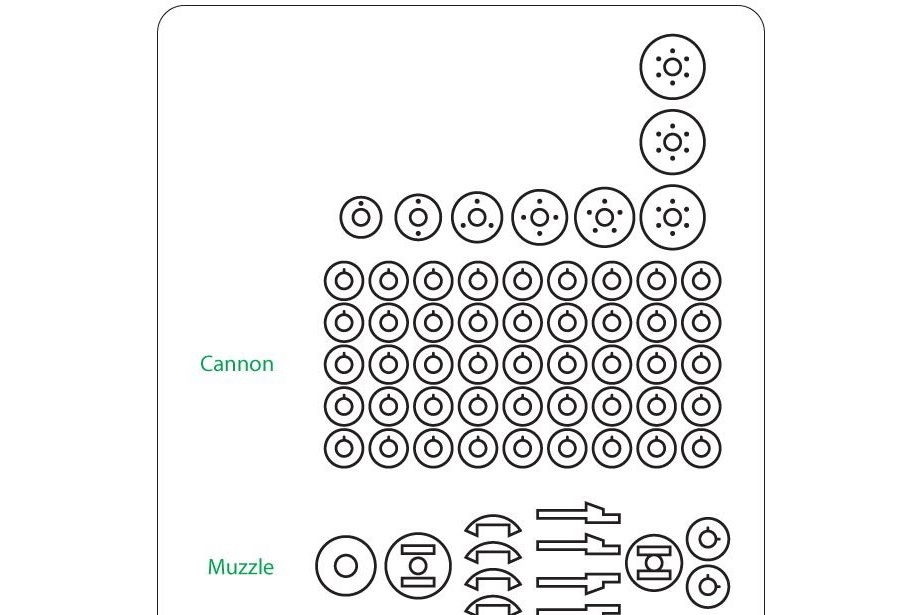
Trinn elleve: pistol
Samler en pistol. Hovedpistolen er en metallstang. De resterende detaljene er festet på den.

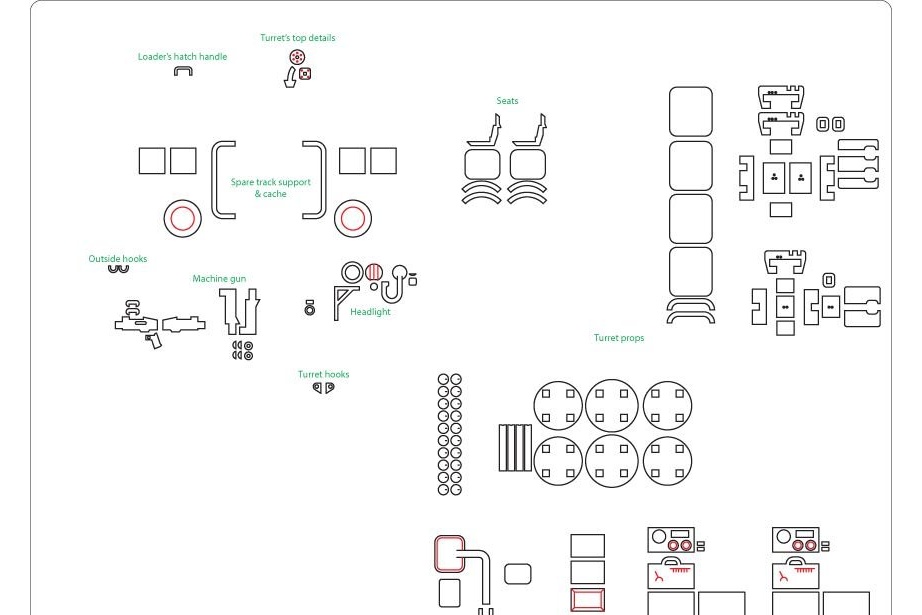
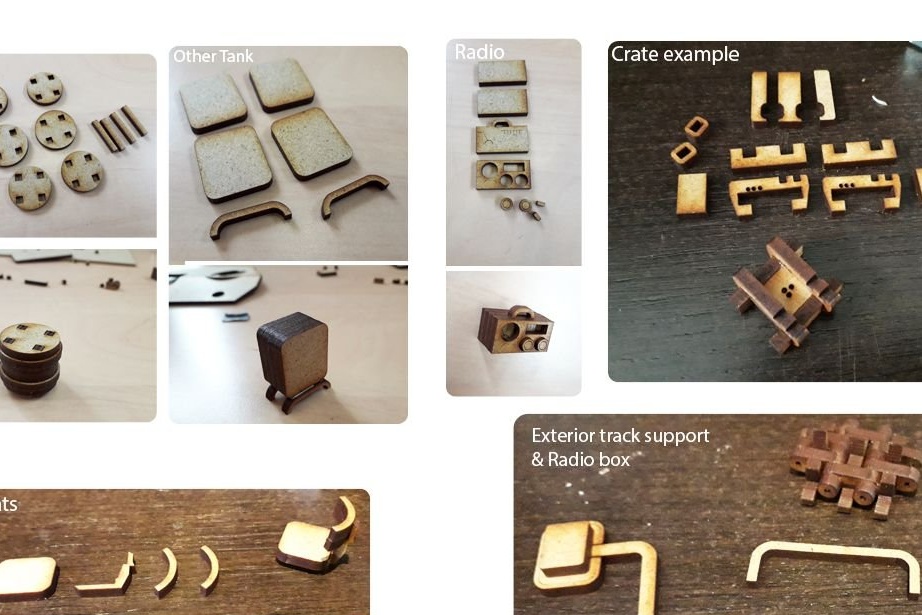
Trinn tolv: Små detaljer
Sikrer små deler av tanken.
Inne på venstre side er det et sete og en maskingevær, utenfor tønnet til en maskingevær.
Rett på førersetet: sete, kontrollspaker og pedaler, soltak.
Utenfor: kroker, lyskastere, kasser, ammunisjon, ståltau, etc.
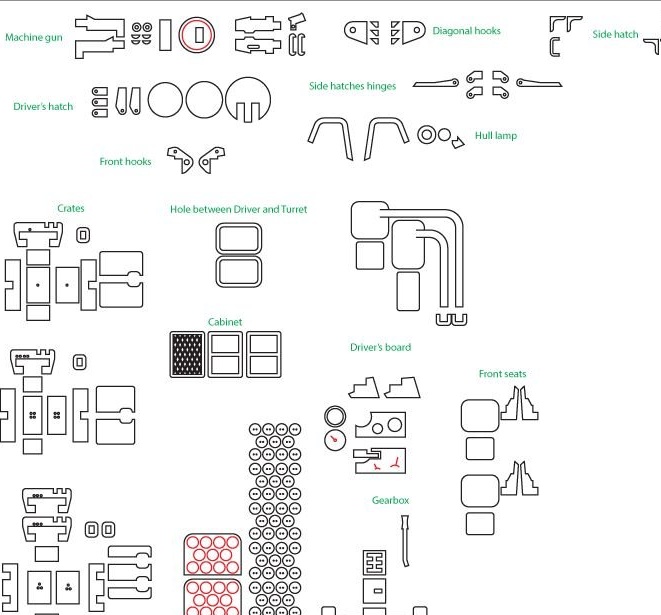

En tank under vann er festet til tårnet, en walkie-talkie inne i tårnet.

Trinn tretten: Elektronikk
Installerer motorer. Utfører installasjon av den elektroniske delen i henhold til diagrammet.
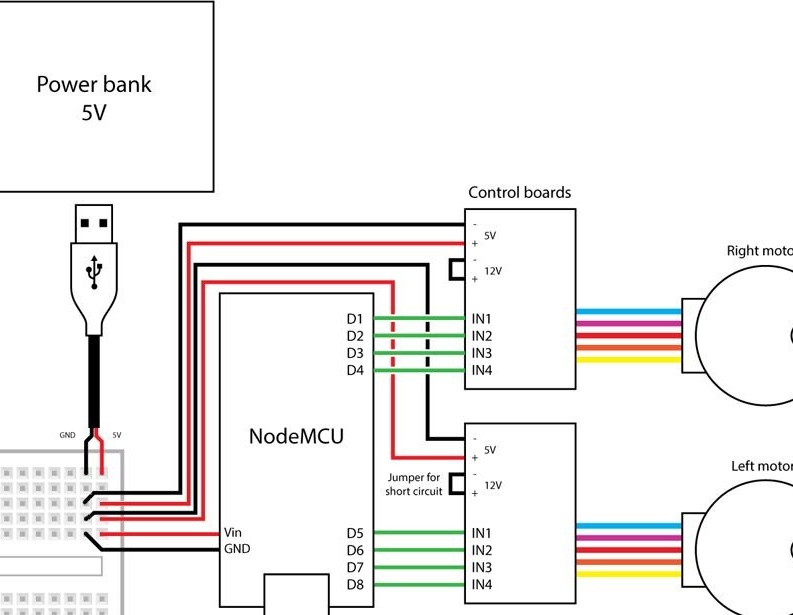

For trådløs kontroll valgte jeg NodeMCU-kontrolleren. Modellen styres gjennom NodeMCU og Blynk-applikasjonen (tilgjengelig på Android / iOS). Denne appen gir en fullt tilpassbar HUD å kontrollere fra alle Arduino eller iOS-telefon via WiFi.
Så, etter å ha installert applikasjonen, er det første du må gjøre å opprette en konto.
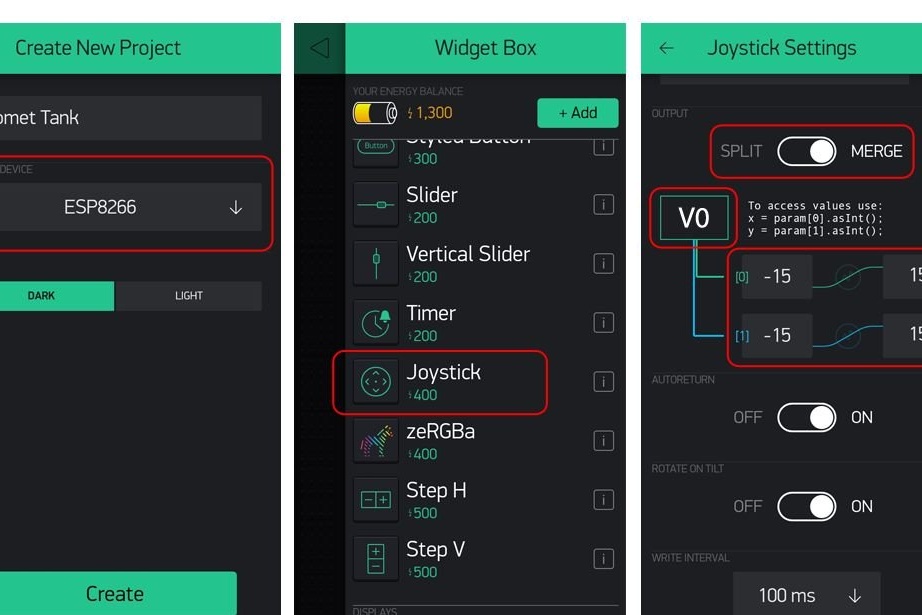
Opprett et nytt prosjekt og tilordn ESP8266 (NodeMCU-brikke) som mikrokontroller og sett WiFi-modus.
Så snart du først ser HUD, lager du en styrespak. Send joystickinformasjonen til den virtuelle pinnen V0 i noden.
Når du har opprettet en styrespak, klikker du på den for å åpne innstillingene. Still inn rekkevidden fra -15 til 15 på stillinger X og Y.
Installer biblioteker.
Last ned Stepper2-biblioteket først: https://github.com/udivankin/Stepper2
Dette biblioteket er et godt alternativ for billige trinnmotorer, for eksempel den som mesteren brukte. Det styrer bedre motorfaser og gir bedre dreiemoment. Etter å ha lastet ned .zip-filen, installerer du den fra Arduino-programvaren: Skisse> Inkluder bibliotek> Legg til .ZIP-bibliotek ... og velg den.
Deretter, hvis du aldri tidligere har blinket NodeMCU, trenger du en datamaskin for å gjenkjenne den. Arduino IDE har en styresjef der de riktige driverne er installert.
Kopier følgende linje:
https://arduino.esp8266.com/stable/package_esp8266com_index.jsonÅpne innstillingene og lim dem inn i nettadressene. Lagre innstillingene og gå til kontrollansvarlig i Verktøy> Board> Boards Manager. ESP8266-kortet må være til stede på slutten av listen. Veiviseren valgte versjon 2.5.0 med IDE i 1.8.9.
Du trenger også Blynk-biblioteket, som du finner på Sketch> Inkluder bibliotek> Administrer biblioteker ... og deretter finne Blynk i søkefeltet.
Gå til prosjektinnstillingene og send et symbol til adressen din, som er en stor streng som lar telefonen din kjenne igjen NodeMCU når den er slått på. Kopier tokenet fra den nylig mottatte e-posten og lim den inn i autorisasjonsfeltet.
Nå kan du installere firmware.
Comet.ino
Alt er klart, nå kan du glede deg over arbeidet ditt.