
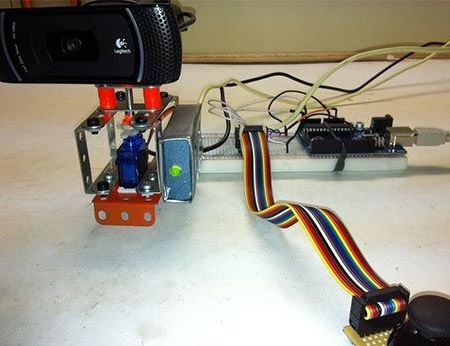
Denne artikkelen vil snakke om hvordan du bruker Arduino kan kontrollere webkameraet. Mer presist vil kontrollen være en servostasjon, som er installert i rammen fra designeren som webkameraet allerede skal monteres på.
Materialer brukt av forfatteren for å lage denne enheten:
1) metallkonstruktør
2) kald sveising
3) webkamera
4) servo
5) lysdioder
6) Arduino
8) joystick fra PS3
Tenk nærmere på design og hovedpunkter ved å lage en enhet for å kontrollere kameraet.
Forundret over spørsmålet om hvordan man bruker en så praktisk Arduino-plattform i tillegg til standardfunksjoner som blinkende lys. En gang han hadde en samtale via Skype med en kollega på jobb, kom forfatteren på en interessant idé. Hva om du gir kollegene muligheten til å kontrollere et webkamera og se hva som skjer på kontoret. Ikke tidligere sagt enn gjort, og forfatteren begynte arbeidet med implementeringen av denne ideen.
Opprinnelig studerte forfatteren hovedmaterialene til artikler der en styrespak ble brukt til å kontrollere enheter opprettet på Arduino-plattformen. Etter å ha forstått materialet i disse artiklene, forsto forfatteren at han kunne bruke den gamle styrespaken fra PS3 for å kontrollere bevegelsene til servoen fra ham.
Fra å begynne å bygge bestemte forfatteren seg for å bygge en ramme der servostasjonen og selve kameraet skal plasseres. For ikke å komplisere oppgaven, bestemte forfatteren seg for å bruke den vanlige metallkonstruktøren, som han kjøpte i en sparsommelig butikk.
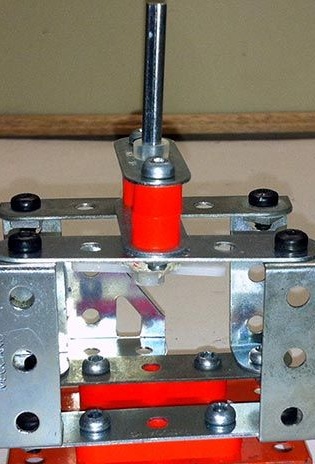
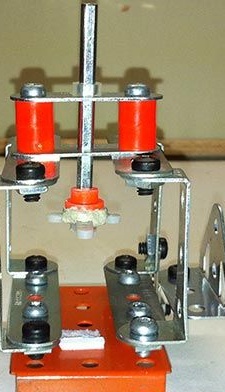
Ved å ta detaljene til denne konstruktøren, viste det seg å skape en slik ramme for fremtidens enhet:
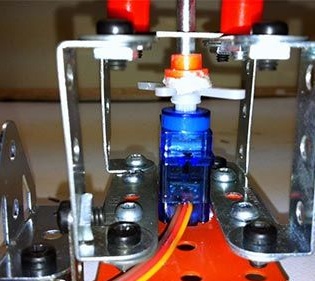
En servostasjon ble installert inne i rammen. Som det kan ses på bildet, passet det perfekt i den opprettede rammen. For å fikse servoen på rammen, brukte forfatteren tosidig tape. Ved hjelp av kaldsveising ble servoakselen koblet til giret, som kontrollerer bevegelsen til plattformen med kameraet.
Det er viktig å sikre at overføringsdesignet er laget til og med slik at det ikke blir unødvendig belastning.
Da begynte forfatteren å installere webkameraet. Et Logitech-kamera ble brukt, som brukes på kontoret til selskapet der forfatteren jobber. På grunn av at kameraet ikke tilhører forfatteren, demonterte han det ikke og fjernet motvekten, selv om dette ville forenkle utformingen av fremtidens enhet.

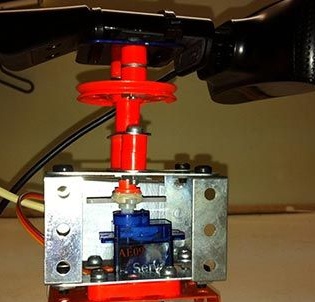
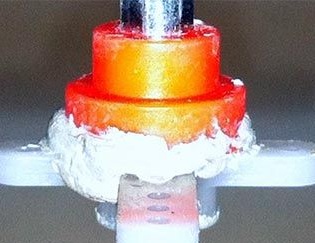
For på en eller annen måte å kompensere for vekten på kameraet og fordele den i midten av strukturen, brukte forfatteren 2 tykke pakninger. De lar deg flytte vekten på kammeret fra servoakselen til hovedrammen, og unngå også trykket på akselen på selve kammeret.
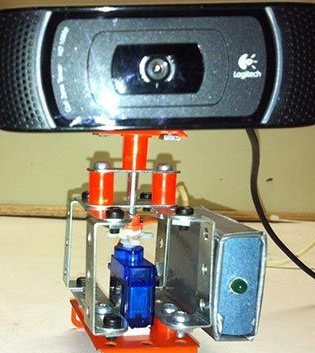
Kameraet er montert på en spesiell rund plattform, som er basert på en sjakt som kommer fra servostasjonen. På denne måten realiseres kamerakontroll ved hjelp av en kryssoverføring.
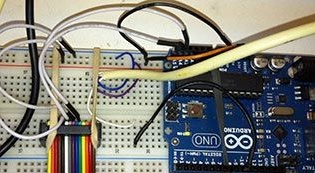
Etter at den mekaniske delen av strukturen var klar, tok forfatteren opp den elektronisk stuffing.
Til å begynne med bestemte han seg for å koble til servoer og lysdioder som viser status for systemet.
Selve servoen har 3 ledninger: -GND, + 5V og Signal. Forfatteren brukte 9 pinner for å innse muligheten til å kontrollere stasjonen. For å lage en indikator for stasjonsaktivering installerte forfatteren en diode som er koblet til to ledninger: + 5V og GND med en motstand på + 5V-linjen.

Da forberedte forfatteren, basert på artikler på Internett, en ødelagt joystick fra PS3 for å kontrollere stasjonen.

Så plukket forfatteren opp et program for Arduino, takket være det det blir mulig å bruke styrespaken og USB-porten for å kontrollere servoen. For å kommunisere med en USB-port, brukte forfatteren modemkontroll og en applikasjonsterminalemulator som Minicom eller Putty.
Dette programmet har flere funksjoner for kontroll av kameraet.
For å installere kameraet i midten 90 grader, må du trykke "m", kameraet vil også automatisk komme i denne posisjonen når servo-strømmen er slått på. For å rotere kameraet til venstre, trykk “F” -tasten, og ved å trykke på “J” -knappen, roteres kameraet til høyre.
Du kan laste ned programmet på slutten av artikkelen.
Siden forfatteren ikke spesielt regnet ut designet for kamerarotasjonsenheten, begynte det å ha en rekke ulemper.
For eksempel: siden kameraet ikke er festet i rammen, kan det falle fra plattformen når det vippes. siden servoen er ganske liten, skaper kameraets dreiemoment ytterligere rotasjon, noe som igjen deformerer servoen; hullene til servo akselen er for store, så den er ikke statisk og er også utsatt for belastning.
Derfor vil forfatteren i fremtiden oppgradere enheten litt på følgende måte: sørg for at kamerarotasjonen styres av pilene på joysticken, og ikke av knappene. lett på belastningen på servoen når du svinger.