

God dag elskere av Arduino! På Internett så jeg en ganske interessant og spektakulær robot (eller enhet, kaller det hva du vil) som "spiller" Stak-spillet, ved å bruke de samme driftsprinsippene kan du lage en robot som kan spille spill som geometri-streker, piano og andre der du bare trenger Stikk inn på skjermen med en viss sekvens. Hva jeg gjorde, vennligst evaluer i undersøkelsen nedenfor.
Hvis noen er interessert, her er en video av arbeidet med denne roboten:
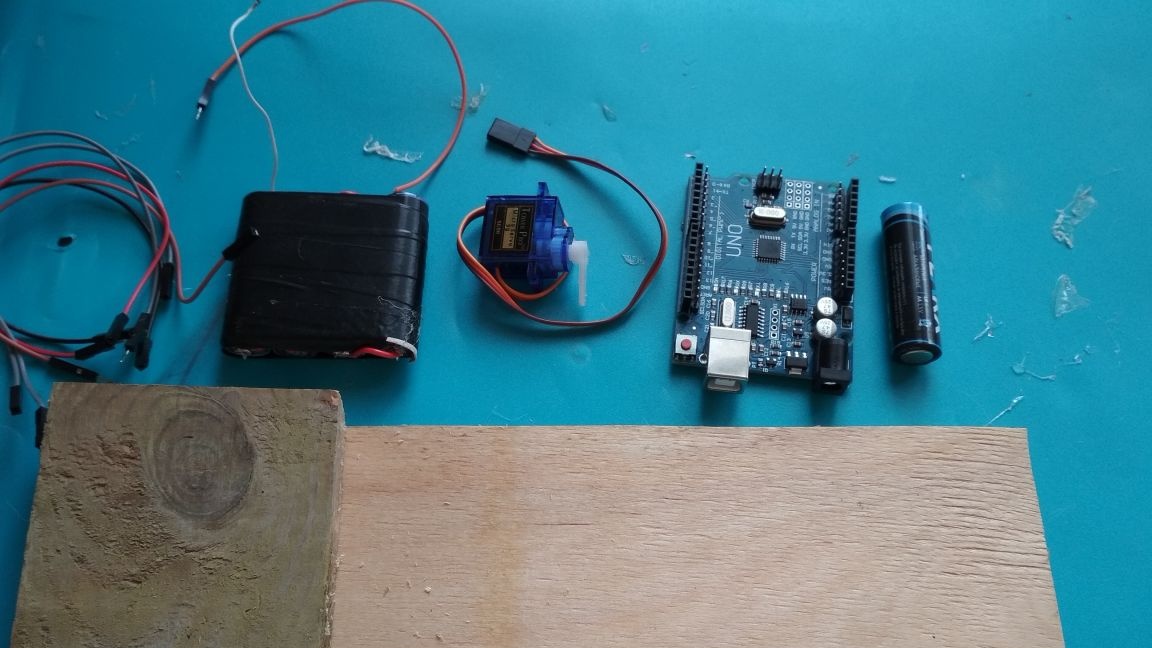
Og så for denne "roboten" trenger vi:
kle opp Arduino uno
- koble ledninger som "far-mor" eller "far-far"
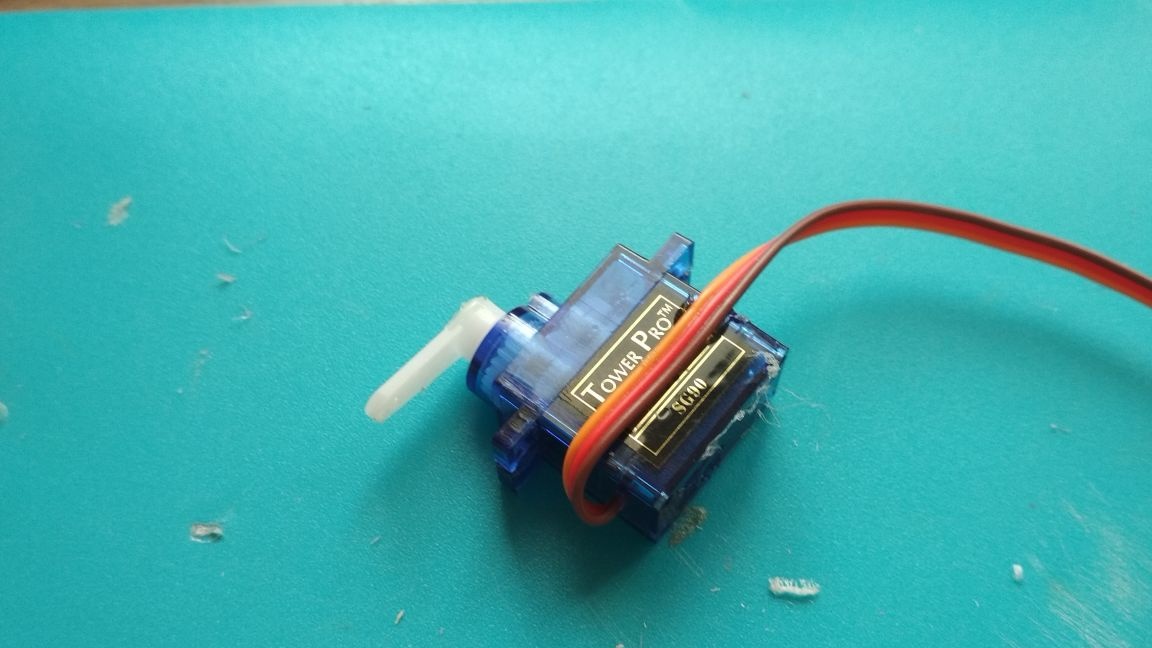
-servoprivod
- et stykke kryssfiner
- et brett omtrent 1 cm tykt, det viktigste er at to ganger er tykkere enn kryssfiner
ispinne
-stilus
Folie (hvis det ikke er noen pekepenn)
-batteri (hvis det ikke er noen pekepenn)
- strømforsyning for 6-12 volt (jeg bruker 4 fingerbatterier koblet i serie)
Fra verktøyene vi trenger:
-Scissors
termisk lim
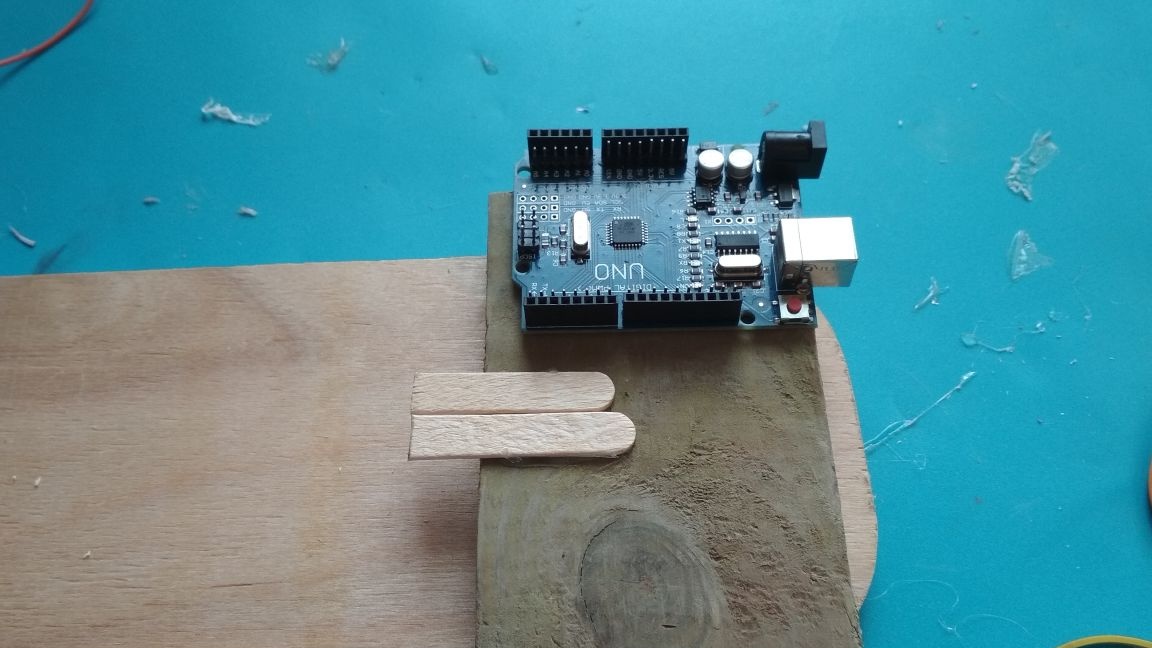
Og så er den første tingen å gjøre å kutte et stykke dobbelt så stort som telefonen din fra et stykke kryssfiner, du kan større, og du må kutte et stykke på størrelse med telefonen fra brettet (jeg laget litt forskjellige størrelser, men dette er ikke avgjørende i det hele tatt). Så limer vi emnene våre som vist på bildet:

Ta iskremen og kutt den i omtrent halvparten:

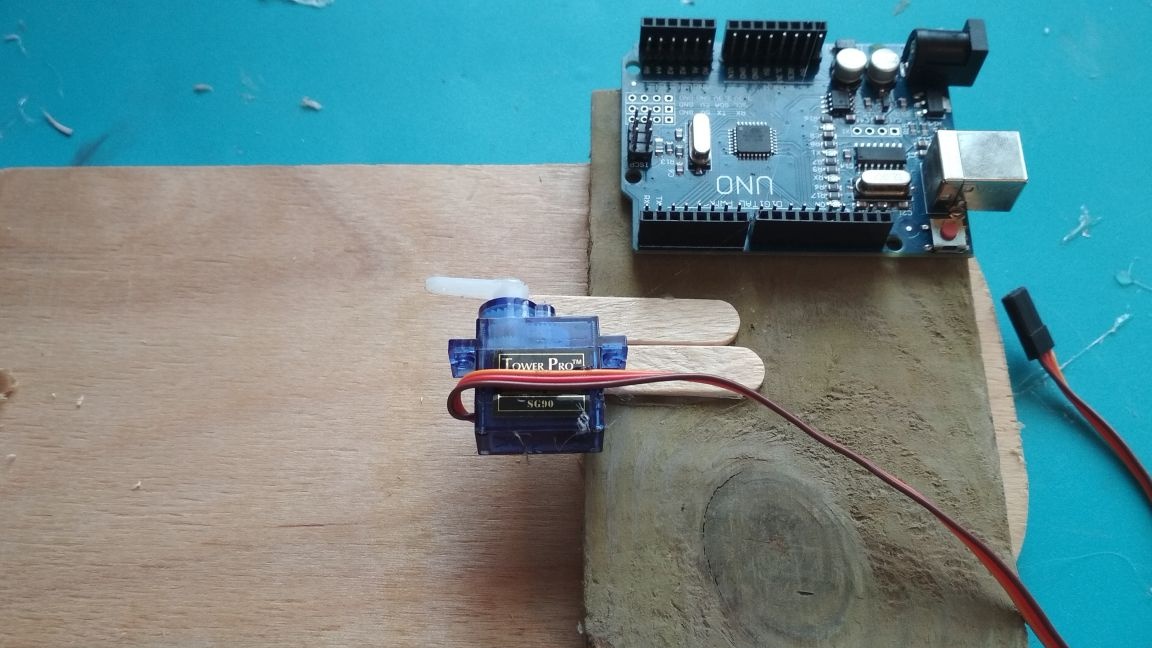
Lim dem i midten av brettet, fra kryssfinersiden, som vist på bildet:

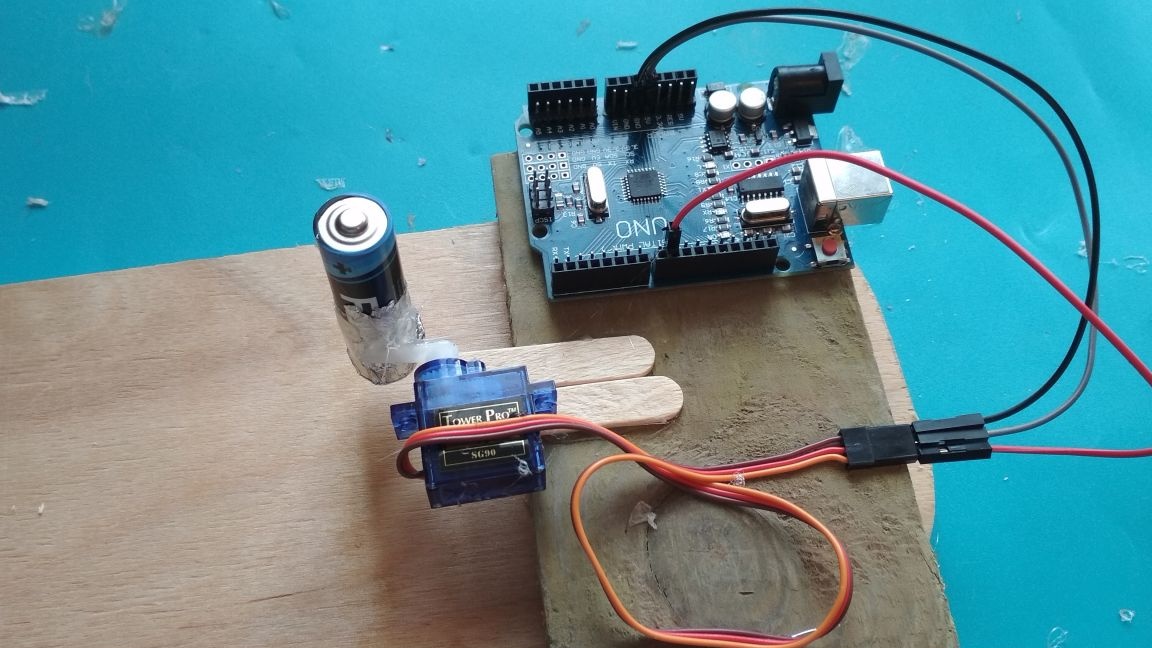
Vi limer Ardino Uno-brettet fra kanten av brettet:
Vi tar servomotoren og limer ledningene slik at de ikke forstyrrer:
Lim servomotoren til enden av halvdelene av ispinnene:
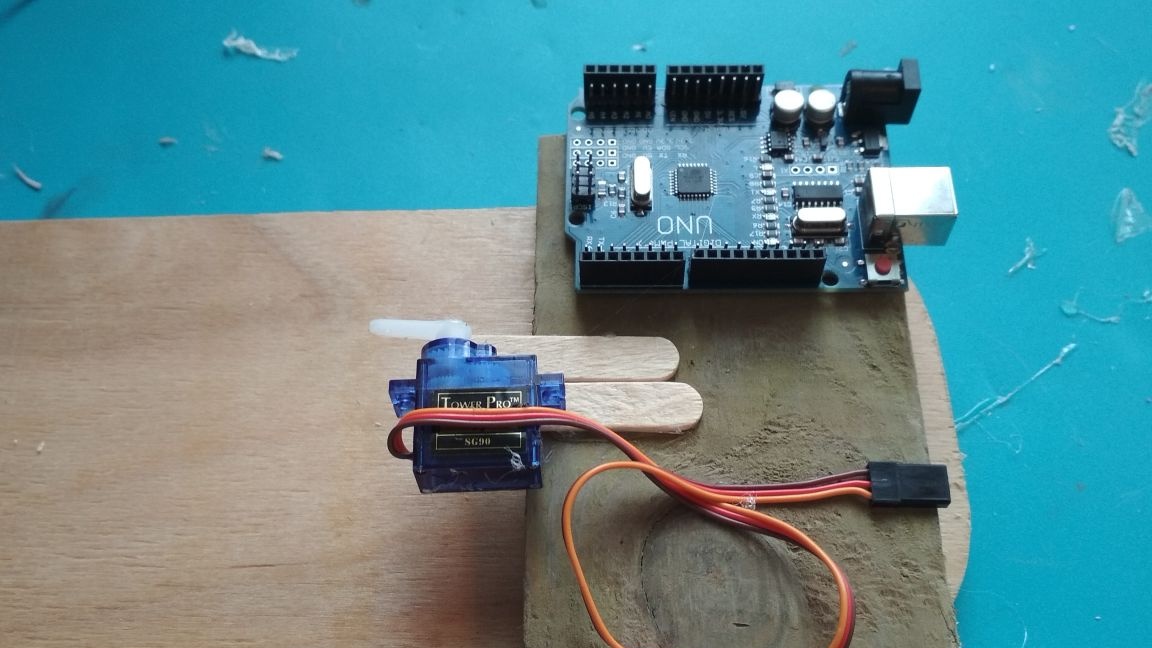
Vi legger ledningene og limer servomotorutgangen til kanten av tavlen:
Legg til tre pappa-mamma ledninger, helst i forskjellige farger, for ikke å bli forvirret
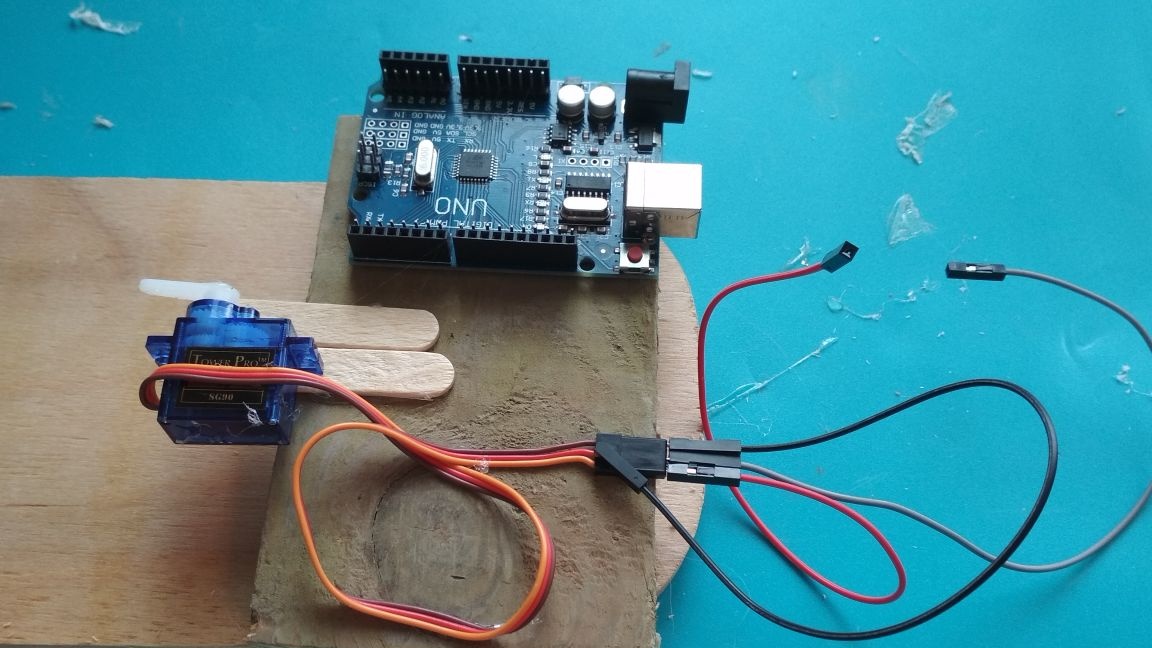
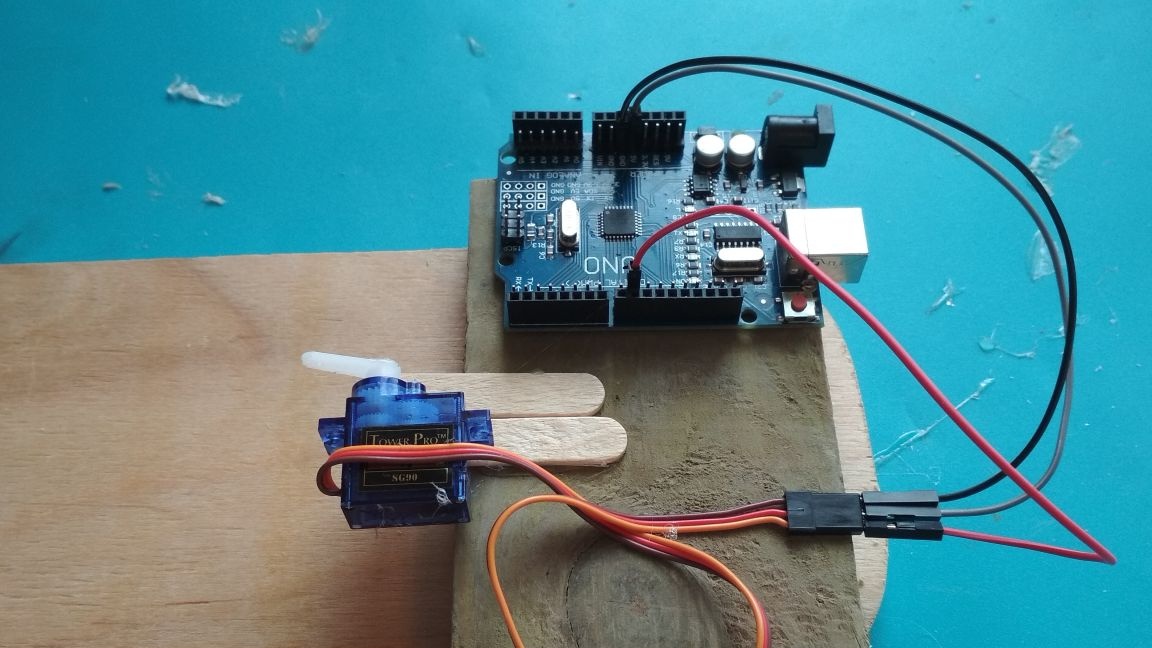
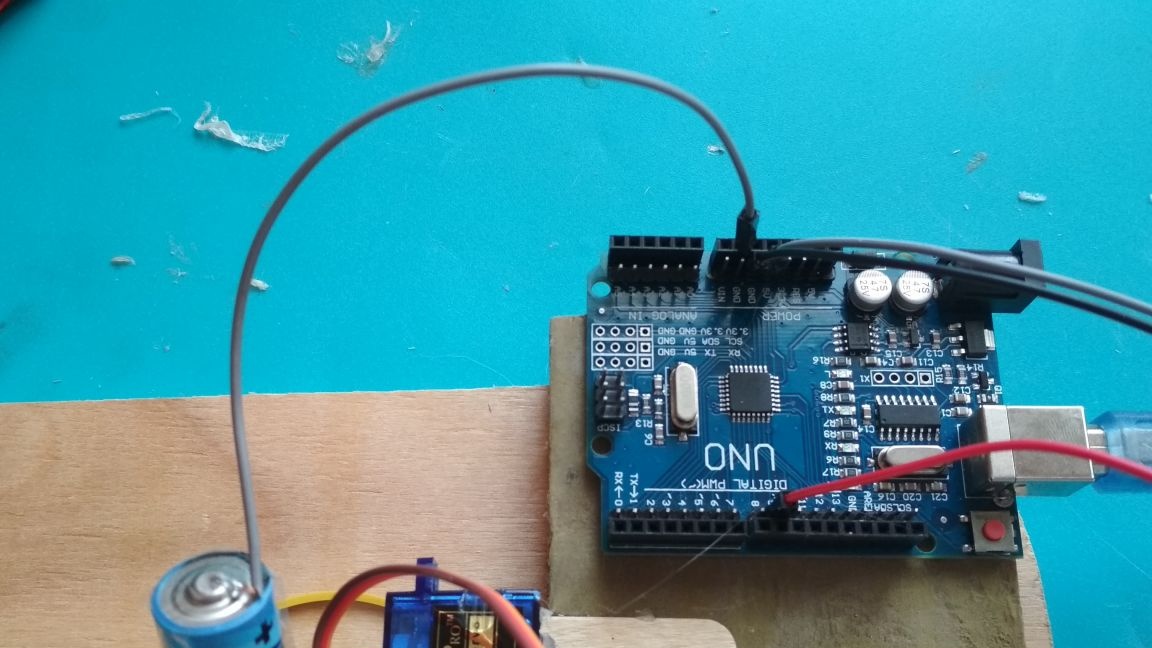
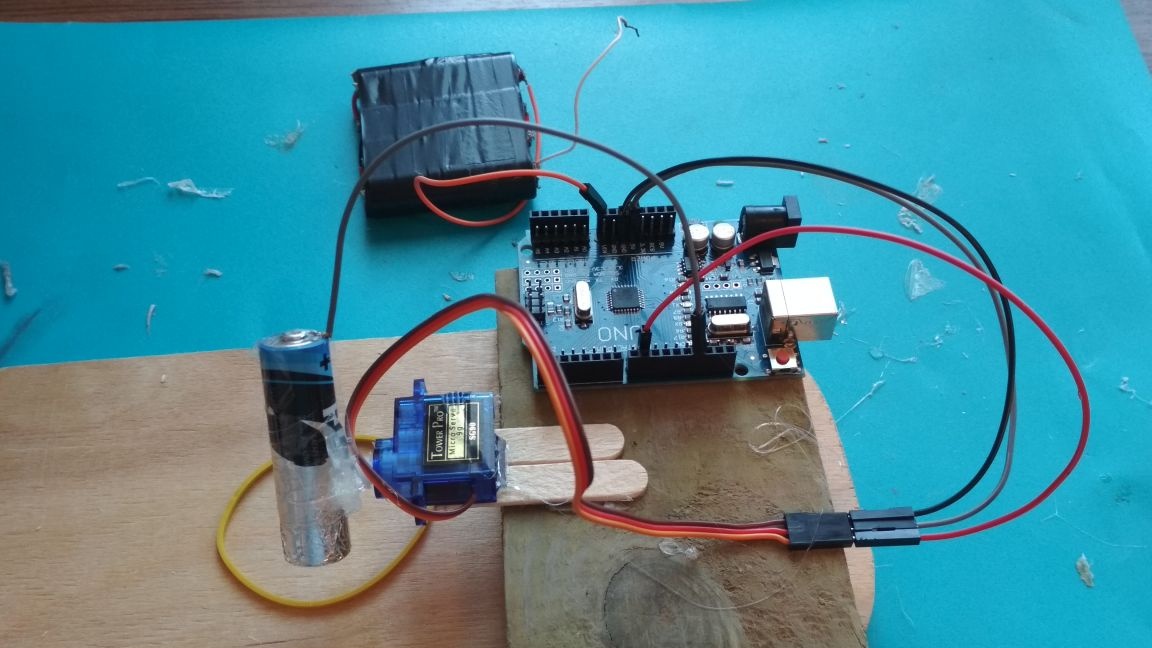
Vi kobler servostasjonen til Arduino-styret som følger:
brun ledning til gnd
-Red ledning til 5v
- oransje ledning til 9 "digital pin"
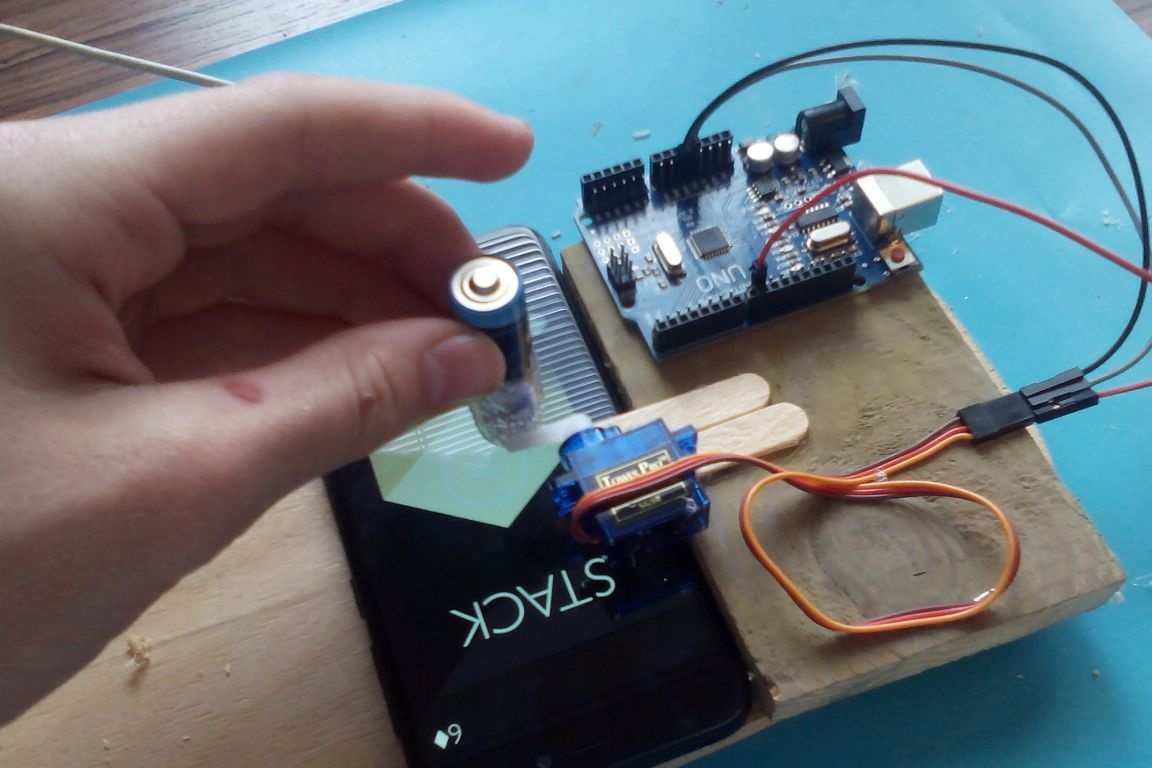
Hvis du ikke har en pekepenn, som min, fortvil ikke, det er veldig enkelt å gjøre.
Vi tar et vanlig fingerbatteri og negativ side så tett som mulig, pakk det inn med folie, og så tape vi det veldig tett:

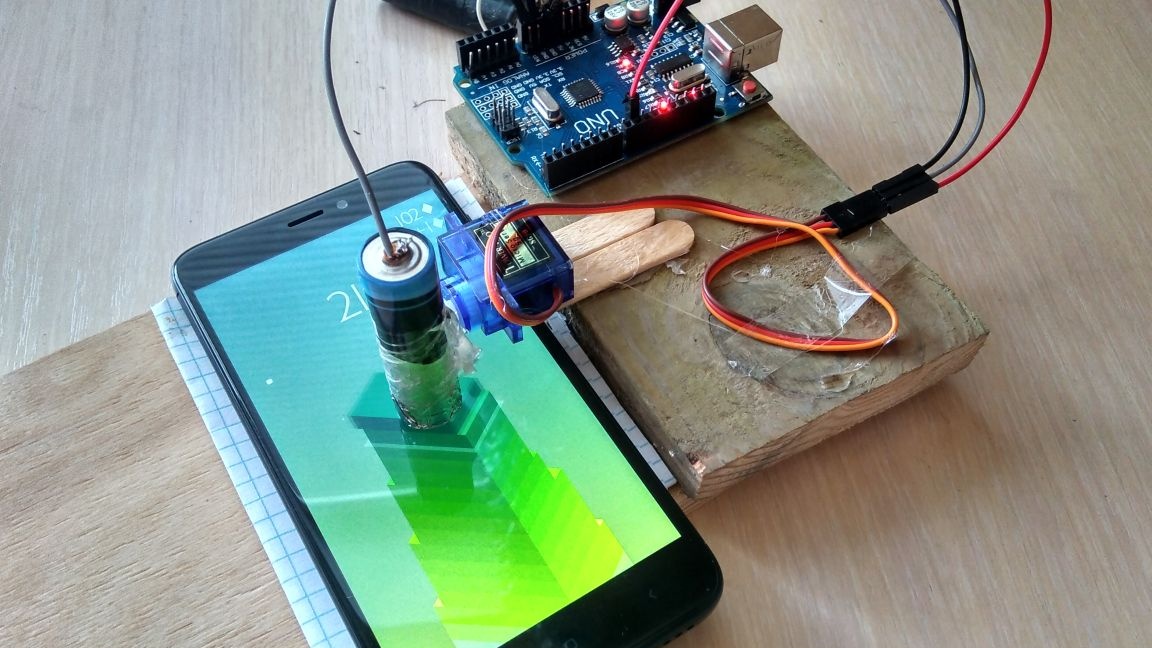
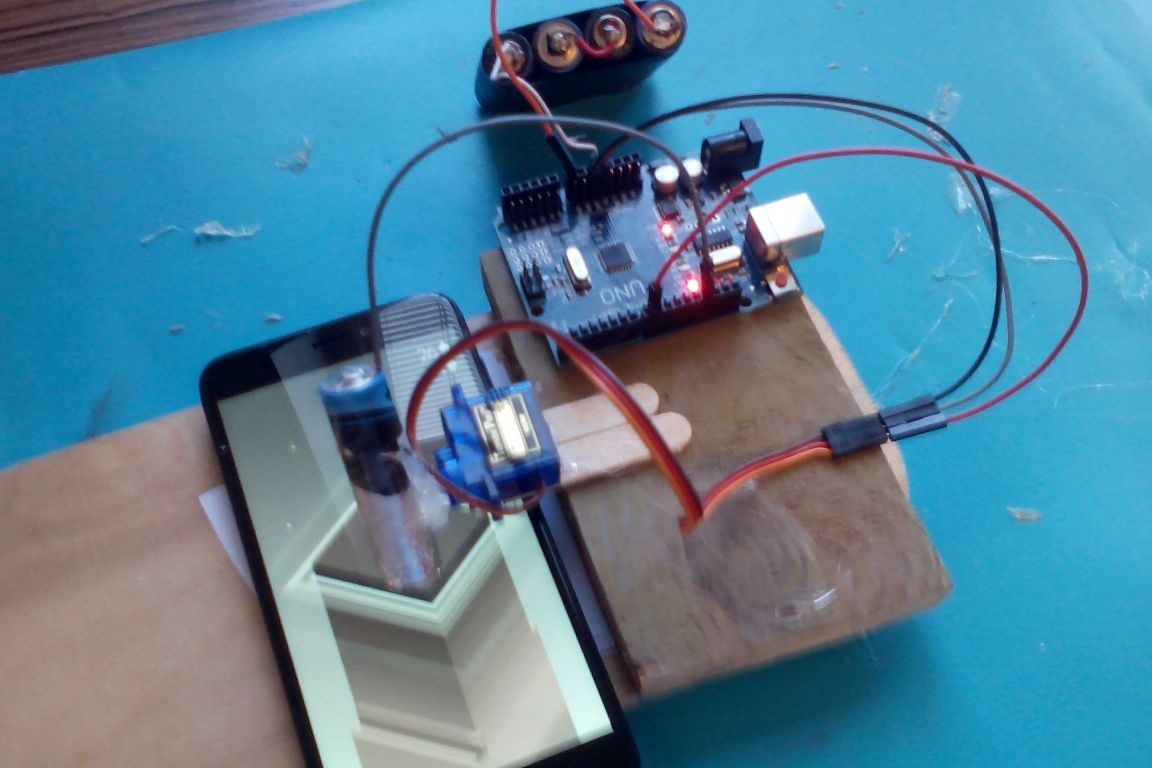
Nå må du legge telefonen på kryssfiner under servomotoren, fest batteriet på toppen og noter på hvilket nivå vi vil feste "pekepennen" vår. Etter at vi har notert alt, lim fast "pekepennen" fast på spaken til servomotoren, strengt i en vinkel på 90 grader (samme vinkel skal være når du bruker "pekepennen" på telefonen når vi målte den). Alt skal fungere som vist på bildet:

Nå kobler vi vår "robot" til datamaskinen gjennom porten som er konfigurert i Arduino IDE, kjører den tidligere navngitte Arduino IDE og kopierer skissen nedenfor, og klikker deretter på "nedlasting" -knappen. Hvis alt er gjort riktig, lastes skissen uten feil, og etter noen sekunder begynner servomotoren å jobbe. Hvis du har betydelige forskjeller i størrelsene på pekepenn og servomotor, så lag denne skissen for deg selv, den er ganske enkel.
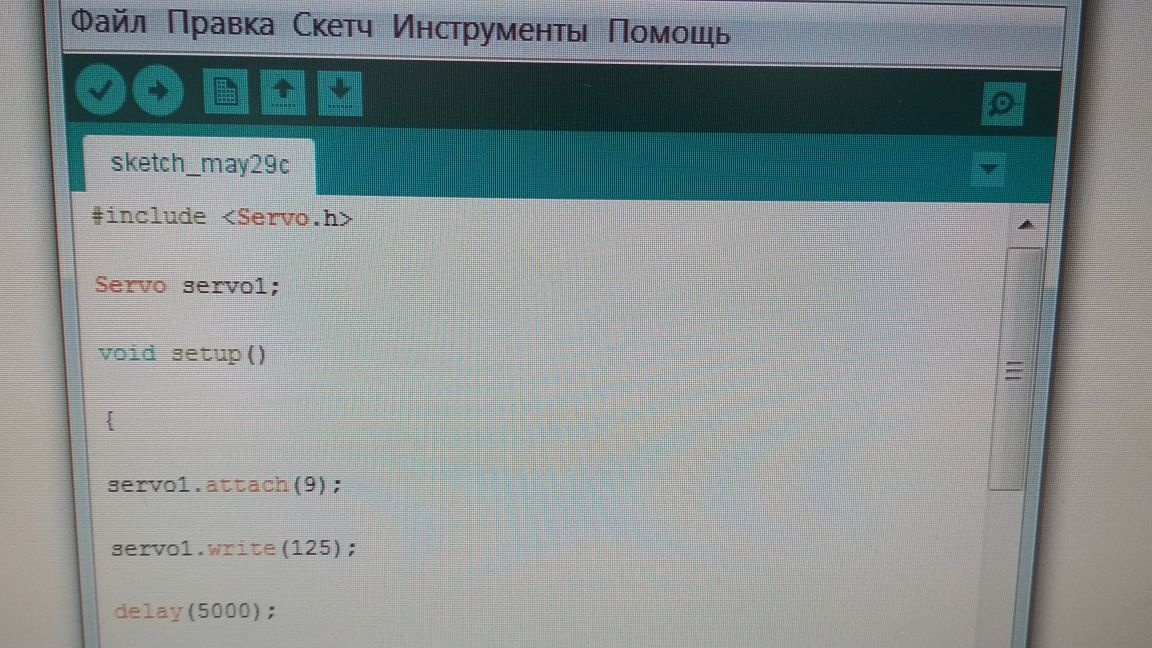
Her er en skisse:
#include
Servoservo1;
ugyldig oppsett ()
{
servo1.attach (9);
servo1.write (125);
forsinkelse (5000);
servo1.write (90);
forsinkelse (200);
servo1.write (125);
forsinkelse (750);
}
void loop ()
{
servo1.write (90); // 1
forsinkelse (200);
servo1.write (125);
forsinkelse (600);
}Ved hjelp av klebende tape eller elektrisk tape, vikler vi den avstrippede siden av en "mor-til-mor" -type ledning med en avskåret "mor" -utgang til plussiden av vår "stylus" og sender denne ledningen til Gnd på Arduino:
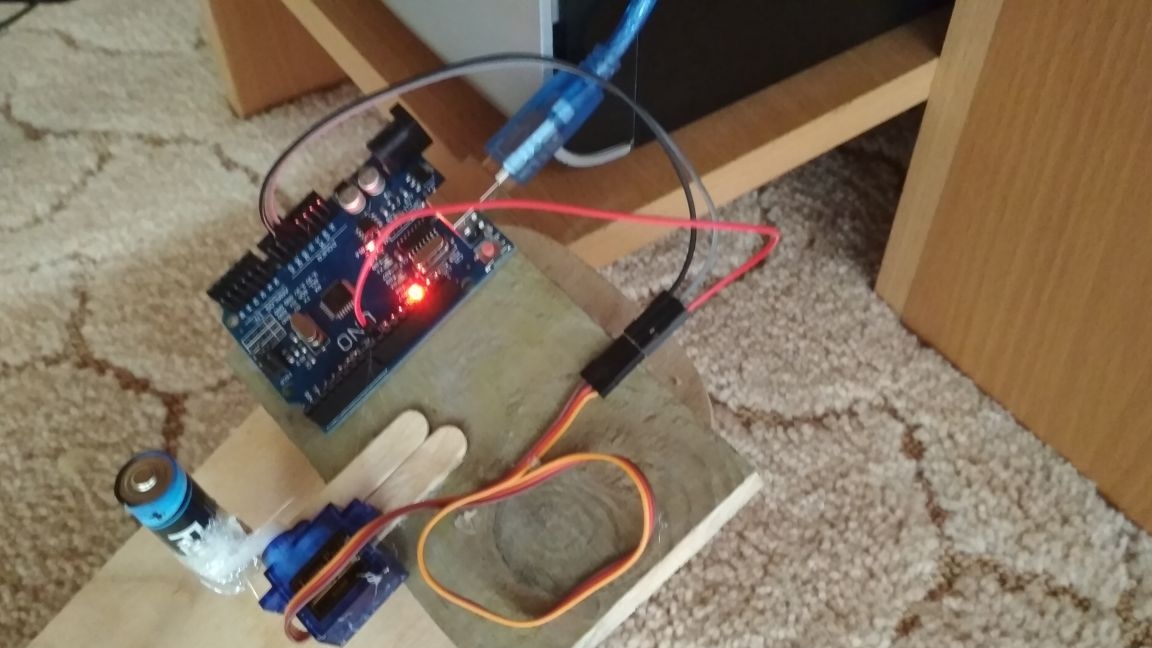
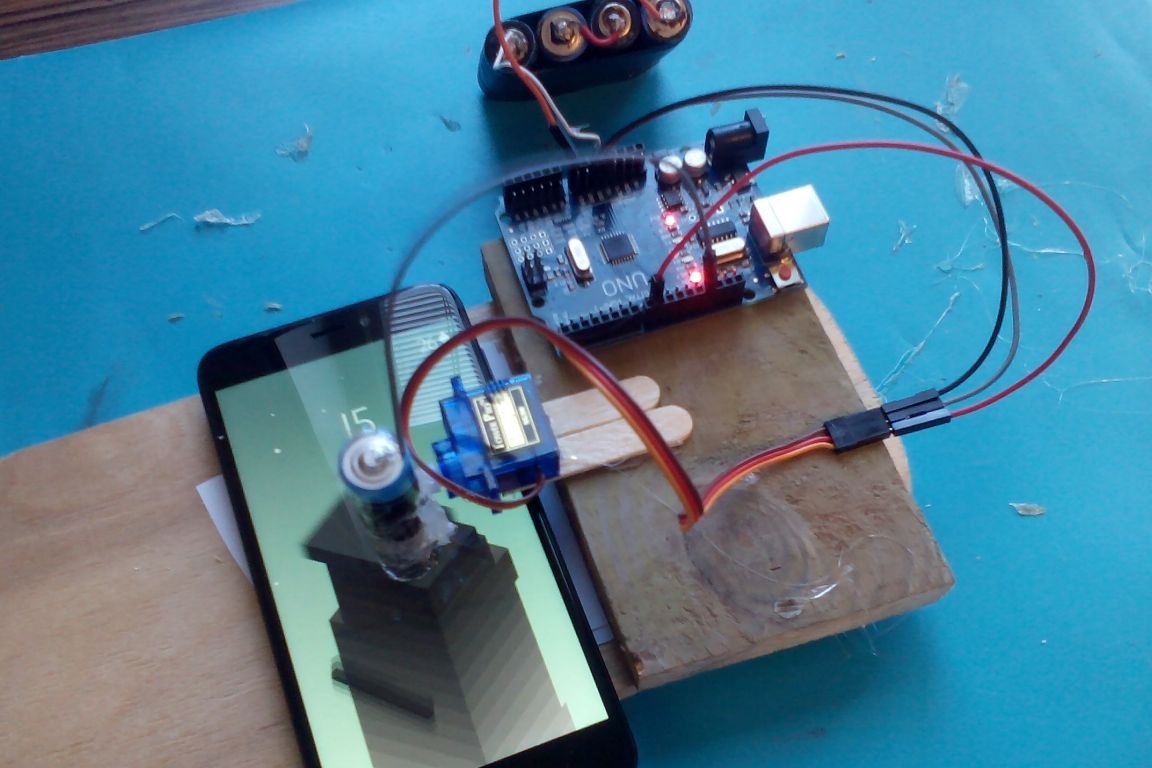
Vel, det er det! Vår enkle roboten klar og det gjenstår bare å teste det! For å gjøre dette, legg telefonen under pekepinnen, start Stak-applikasjonen og plasser telefonen slik at den er over “play” -knappen, som er indikert med en pil, vi kobler strøm til arduino enten ved hjelp av en spesiell adapter, eller vi sender ut pluss fra “batteriet” til Uin på Arduino, og minus til gnd. etter å ha koblet til strømmen, begynner roboten vår umiddelbart å "spille". Og selv om jeg ikke brukte en normal pekepenn, men et batteri, fordi roboten vår ofte ikke kom i tempo og bommet, spilte den i lang tid uansett. Hvis alt gjøres veldig nøyaktig, vil den vanligvis spille til telefonen går ned.

Takk alle for oppmerksomheten!