


Jeg tok en del av designet mitt fra monteringsinstruksjonene til Lego Technic 42049. Resten er improvisasjonen min. For styring vil jeg bruke en Bluetooth-modul koblet til en Android-enhet eller datamaskin.
Så vi trenger:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- 2 L9110S motordrivere
- 1 servostasjon SG-90
- Bluetooth-modul HC-05 eller tilsvarende
- USB-UART for arduino firmware
- Mini girmotor 50 o / min
- Mini motor girkasse 100 o / min
- Motorgirkasse 6v 150 o / min
- 2 lysdioder
- 2 motstander 150 ohm
- Kondensator 10v 1000uF
- 2 enkelt rad kammer PLS-40
- Induktor 68mkGn
- 6 NI-Mn 1,2v 1000mA-batterier
- Kobling pappa-mamma to pinner til tråd
- Homutik
- Ledninger i forskjellige farger
- lodde
- Rosin
- loddejern
- Bolter 3x20, muttere og skiver til dem
- Bolter 3x40
- Bolter 3x60
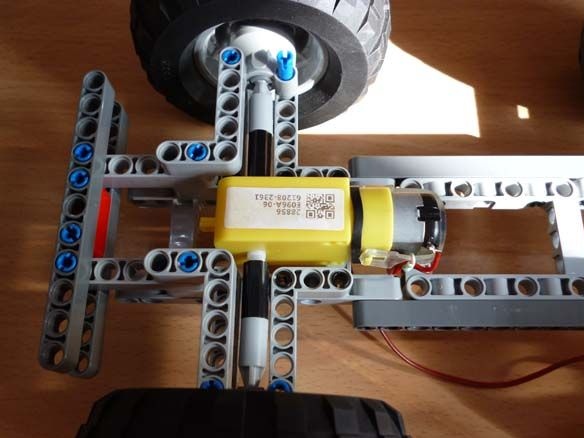
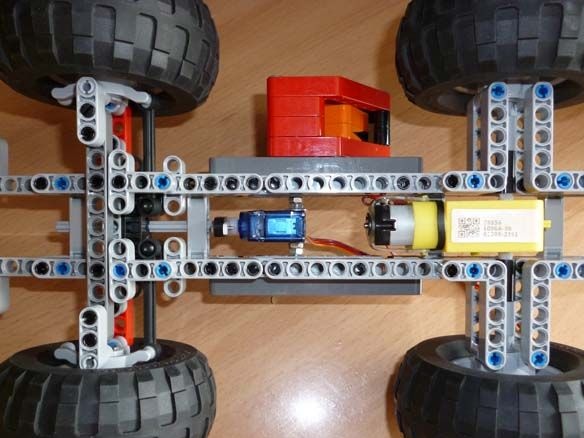
Trinn 1 Bakakselmontering
For bevegelse vil vi bruke en girmotor med en 6-volts motor med en hastighet på 150 o / min. Girkasseaksen må kuttes fra begge sider og legges på legodeler. Bakakselen er satt sammen som følger:
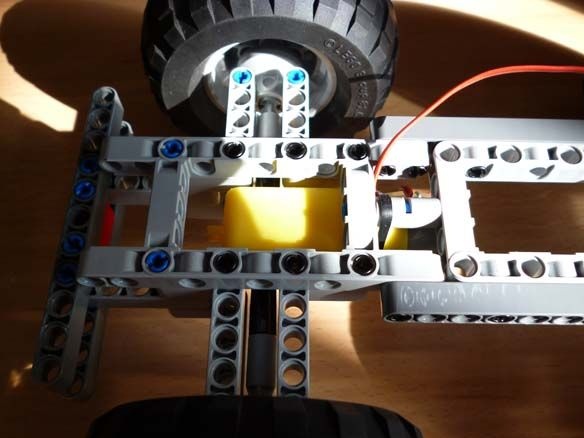
Og på baksiden:
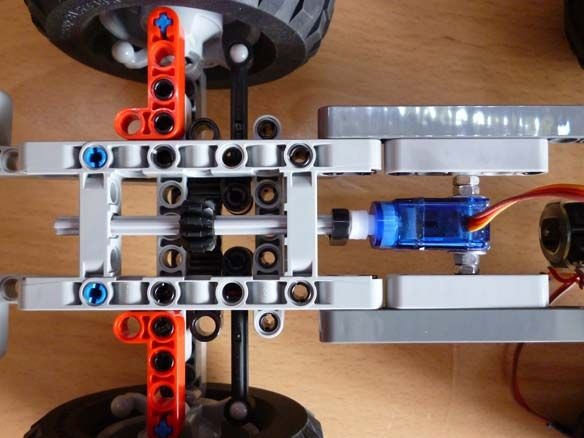
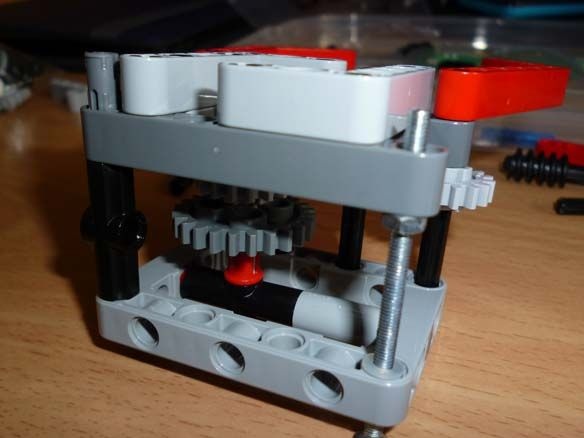
Trinn 2 Montering av foraksel
For hjulets rotasjon er SG-90 servoen godt egnet. For å fikse det på vår modell, er det nødvendig å bore nøye, for ikke å berøre de indre delene av servoen, et gjennomgående hull med en diameter på 3,2 mm eller bare kutte det med en skrivesakerkniv. Og kutt også de utstående delene (“vinger” for feste). Vi setter en bolt inn i hullet som er laget og fikser det med muttere. På servo akselen satte vi på en spak med en skrudd del fra lego:

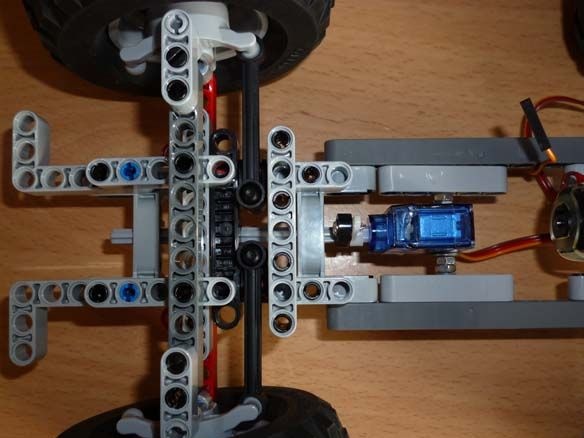
Og på baksiden:
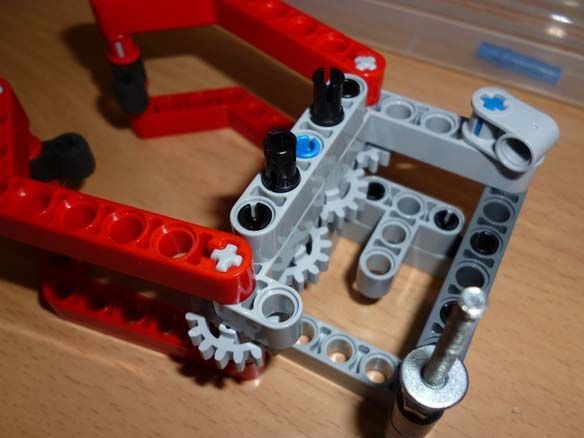
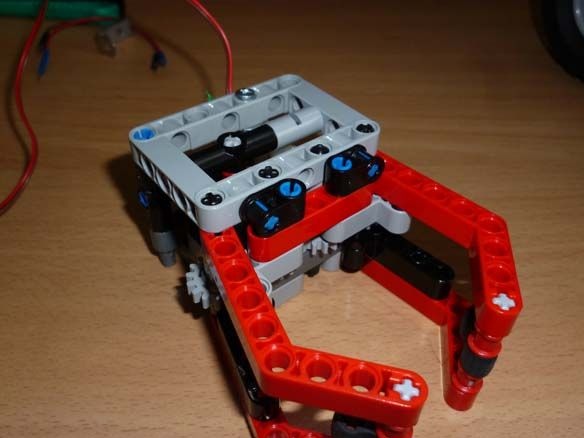
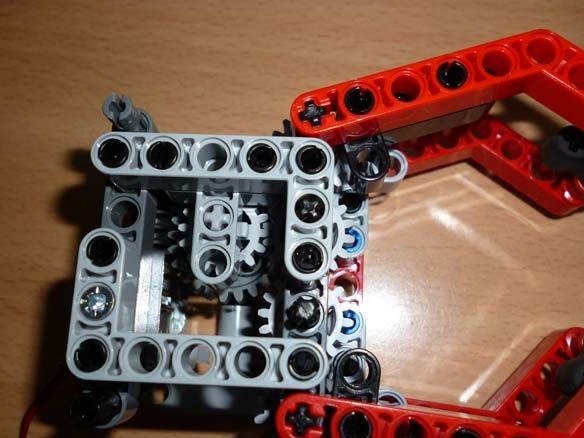
Trinn 3 Montering av sokkel og førerhus
Vi kobler sammen begge broene som vist på bildet:

Vi monterer hytta (nødvendig for skjønnhet):
Vi legger hytta på grunnlag av:

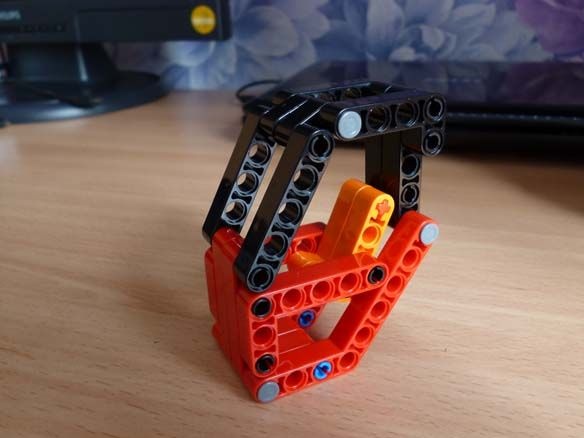
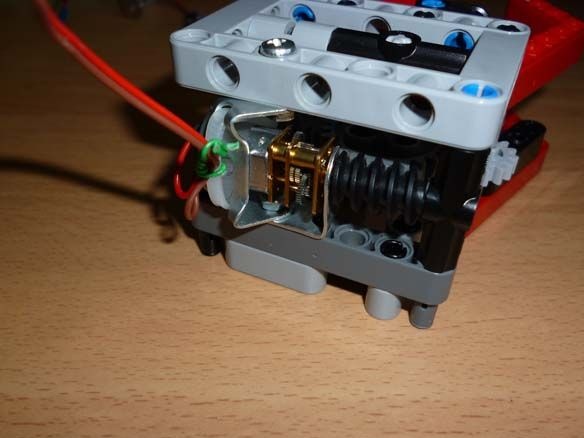
Trinn 4 Sette en hette eller en klo
Kloen blir drevet av en minimotorgir med en hastighet på 50 o / min. Jeg løste problemet med å koble girmotoren med deler av designeren på følgende måte: Jeg satte en koblingshylse på girmotoraksen og satte inn et skrap av en fyrstikk for feste. For montering brukte girmotoren metallplast fra en jerndesigner og en klemme. Det viste seg følgende:

Neste, samler vi selve klo fra bildet:
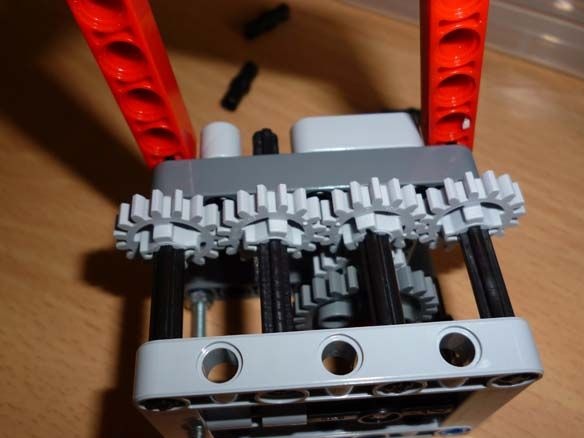

Vi fikser det til basen:
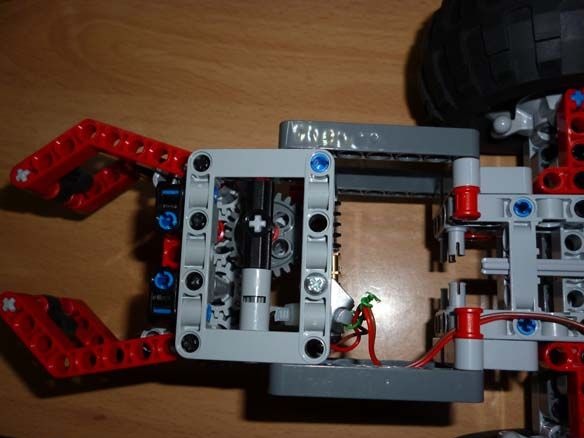

En minimotorgir med en hastighet på 100 o / min er egnet for å løfte en klo:


Trinn 5 Elektriker
Vi vil bruke Arduino Pro Mini og Bluetooth-modulen for kontroll. Motordrivere er nødvendige for å koble motorene.
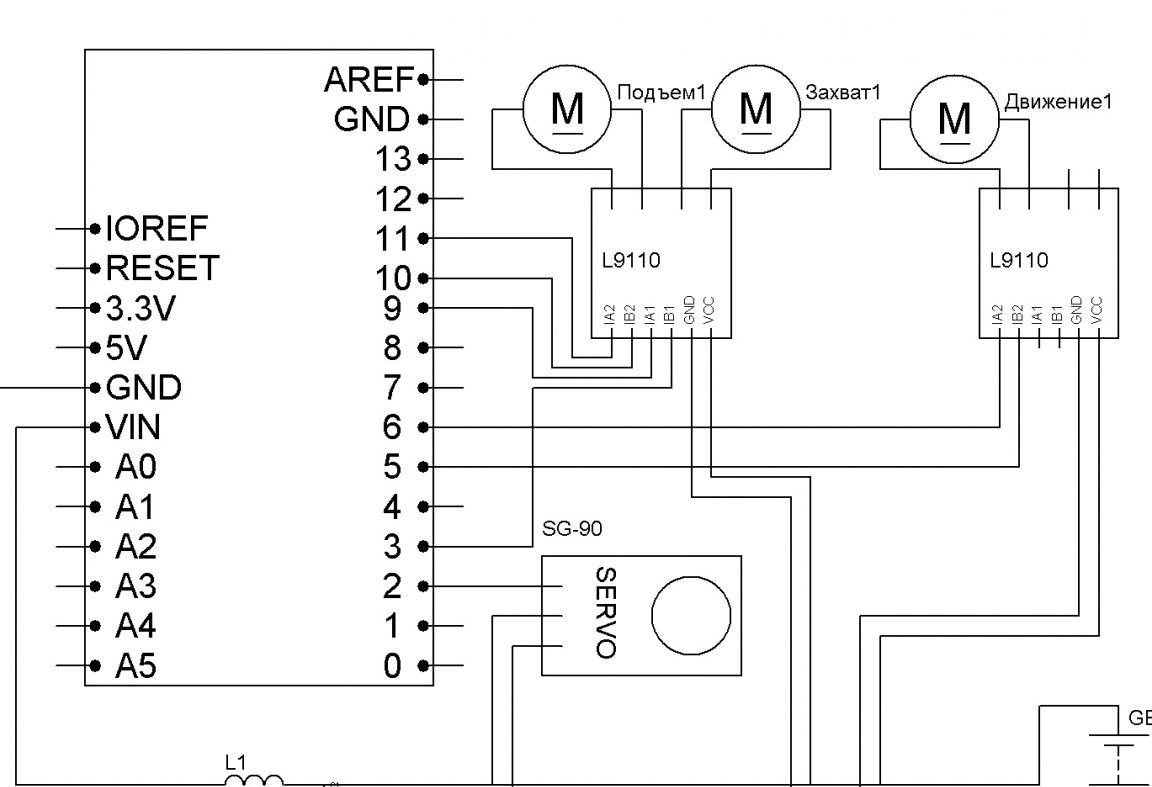
Tilkobling av alle komponenter med Dupont mor til mor ledninger.Strøm - 6 NI-Mn 1,2v 1000mA batterier koblet i serie. En kondensator med lav effekt, en induktor du også finner, du trenger å stabilisere mikrokontrolleren. Anodene til de to lysdiodene er koblet til 4-pins arduino, katodene til GND. Motstander er valgt for lysdiodene som brukes. Rull batteriene med tape for enkelhets skyld.

Vi limer det hele på en tosidig tape på grunnlag av:

Trinn 6 Bluetooth-oppsett
De rimeligste Bluetooth-modulene i dag er HC-05 og HC-06. De er rikelig i kinesiske nettbutikker. Forskjellene mellom dem er at de første kan fungere både i mastermodus (slave) og i slavemodus (master). Det andre er et rent slaveinnretning. Med andre ord, HC-06 kan ikke oppdage en sammenkoblet enhet og opprette en forbindelse med den, den kan bare adlyde masteren.
Korte egenskaper ved modulene:
- Bluetooth-brikke - BC417143 produsert av
- kommunikasjonsprotokoll - Bluetooth Spesifikasjon v2.0 + EDR;
- handlingsradius - opptil 10 meter (effektnivå 2);
- Kompatibel med alle Bluetooth-adaptere som støtter SPP;
- Mengden flash-minne (for lagring av firmware og innstillinger) - 8 Mbit;
- frekvensen av radiosignalet - 2,40 .. 2,48 GHz;
- vertsgrensesnitt - USB 1.1 / 2.0 eller UART;
- strømforbruk - strømmen under kommunikasjonen er 30-40 mA. Den gjennomsnittlige nåværende verdien er omtrent 25 mA. Etter at tilkoblingen er opprettet, er strømforbruket 8 mA. Det er ingen hvilemodus.
Vanligvis selges moduler som to brett loddet sammen. Den mindre er en fabrikkmodul, mye brukt i forskjellige elektronisk enheter. Stort - et spesielt brødbrett for DIY. Det ser ut som et mindre brett med en BC417-brikke:

Og slik gjør DIY-modulene HC-05 og HC-06 seg selv:
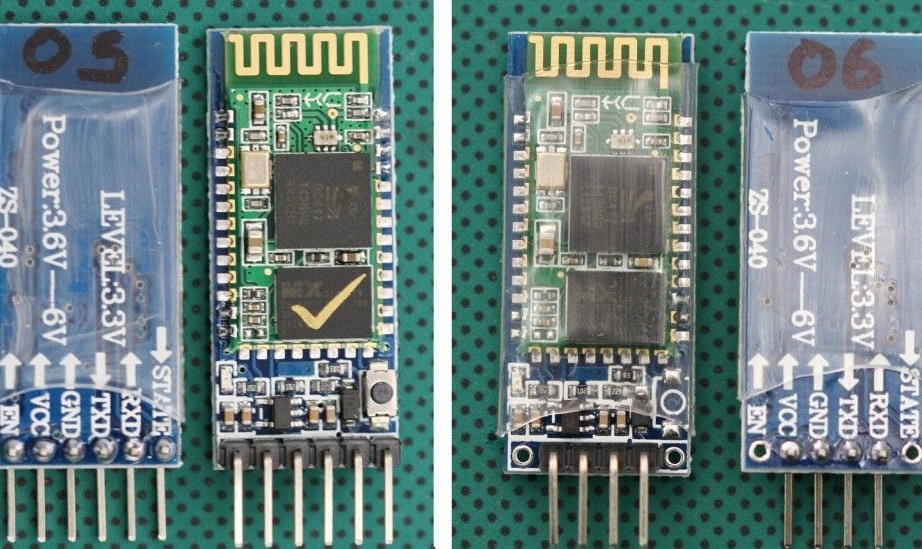
I prinsippet kan du bruke hvilken som helst modul du liker. En modul uten brødplate koster mindre, men da må du ta vare på 3,3 V strømforsyningen til modulen og plage deg selv ved å lodde ledninger til modulen. Jeg valgte det optimale etter min mening i pris / funksjonelt forhold HC-06.
Vi kobler til som følger:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
For riktig drift må modulen konfigureres. Vi vil konfigurere AT-kommandoer som er lagt inn i terminalvinduet. Jeg gir et eksempel på å sette opp HC-05-modulen. Hvis du har en annen innstilling, kan det være annerledes. For at modulen vår skal motta kommandoer, blinker vi først Arduino med følgende firmware:
I dette tilfellet fungerer Arduino som en bro mellom datamaskiner og modulen. I firmware bruker jeg SoftwareSerial-biblioteket. I høye hastigheter fungerer det ustabilt. Hvis du vil ha høy hastighet, kan du koble modulen direkte til Arduino RX- og TX-kontaktene og skrive fast firmware. Men i mitt tilfelle vil vi jobbe med modulen med en hastighet på 9600. Så etter firmware, åpne terminalen og gå inn:
“AT” (uten anførselstegn) svaret “OK” skulle komme (det betyr at alt er riktig tilkoblet og modulen fungerer)
“AT + BAUD96000” (uten anførselstegn) bør svaret “OK9600” komme.
Hvis du har riktig svar, gå til neste trinn.
Trinn 7 Firmware
For å skrive firmware og firmware, bruker jeg Arduino IDE. Den nåværende versjonen for i dag er 1.8. Egentlig firmware:
Trinn 8 Sett opp telefonen.
På en Android-telefon må du installere et program for å kontrollere roboten via Bluetooth. Det er mange av dem. Du kan legge inn “Bluetooth Arduino” i Google play og velge etter din smak. Jeg likte BT-kontrolleren. Last ned og installer på din Android-telefon eller nettbrett. Deretter, gjennom Android-innstillingene, må du opprette en forbindelse med modulen vår. Passordet for tilkoblingen er “1234” eller “0000”. Konfigurer deretter programmet for de aktuelle kommandoene. Listen er nedenfor.
Trinn 9 Datamaskinoppsett (om nødvendig)
Om nødvendig, eller bare for enkelhets skyld, kan du bruke en datamaskin eller bærbar PC. For å gjøre dette, må datamaskinen ha Bluetooth. Vi etablerer kommunikasjon med modulen vår gjennom kontrollene på datamaskinen. Deretter trenger vi en terminal for å sende kommandoer. Enhver praktisk for deg. Etter å ha registrert fastvaren, utføres kontrollen med følgende knapper (kommandoer):
W - fremover
S - tilbake
A - venstre
D - riktig
F - stopp
G - ratt
K - frontlykter
L - hodelykt av
R - løft opp
E - nedoverbakke
Q - stoppheis
T - fange
Y - løslatelse
H - Stopp klør
Det er upraktisk å legge inn kommandoer, så jeg anbefaler at du bruker programmet til å sende kommandoer. Jeg bruker Z-Controller.I programmet velger du porten (com-porten som forbindelsen blir gjort gjennom) og konfigurerer tastene for kommandoene. Sett opp tomgang og intuitiv.
