



Denne artikkelen vil dekke hvordan du lager gjør det selv robotartist. Du har selvfølgelig et slikt bilde roboten vil ikke tegne, men overraske bekjente eller venner med ham homebrew kvist det er mulig. Og samler du en slik robot sammen med barna dine, vil dette utvilsomt hjelpe utviklingen av kreative karaktertrekk.
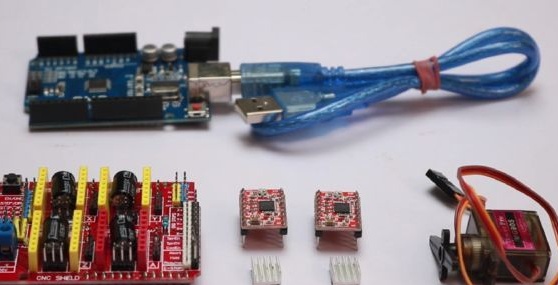
Verktøy og materialer:
-To LED-stasjoner;
-Bord 3 mm;
-Pila;
-Kley;
-
-
-
-
-
-Computer;
- skrutrekker;
-Loddjern:
-Smazka:
-Lineyka;
-Karandash;
-Drel;
Limpistol;
-Skrivende penn;
- saks;
-Pruzhina;
-Nitka;
- Batteri 12V;
seeing-;
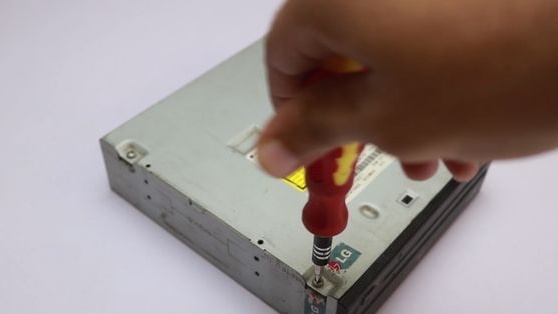
Trinn en: LED-stasjoner
Parses CD-stasjoner. Fjerner deksler, elektronikkbrett.




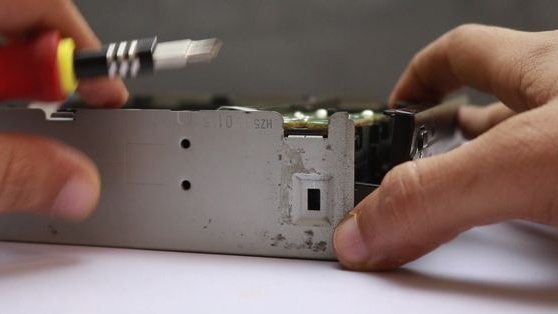

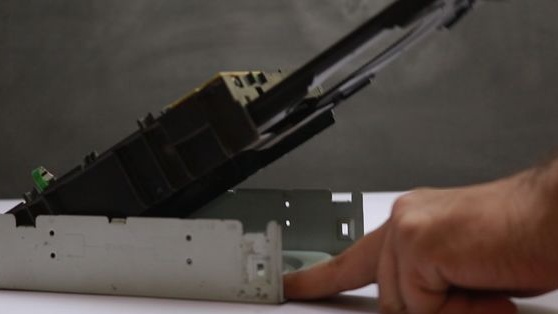
Fjerner en ramme med en vogn og en trinnmotor fra huset.
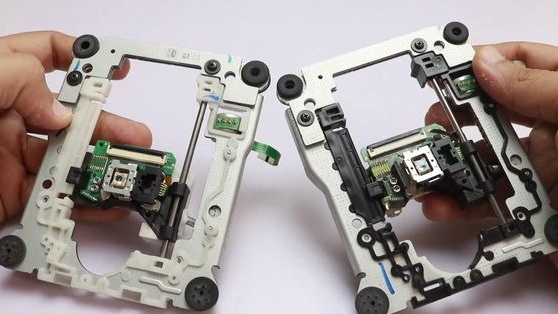
Hun legger den ene rammen, analyserer den andre.
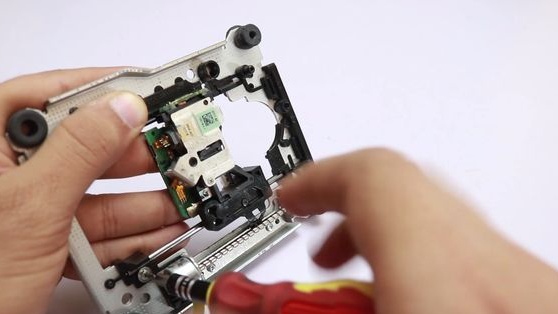
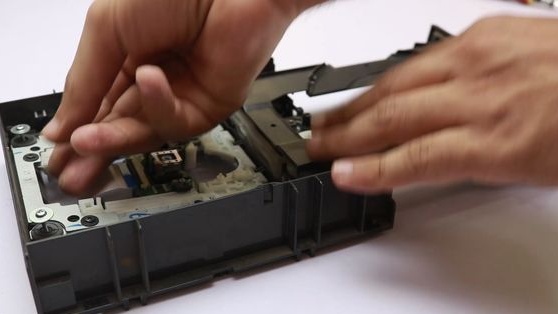
Fra den andre CD-stasjonen er det bare behov for en vogn og en trinnmotor.


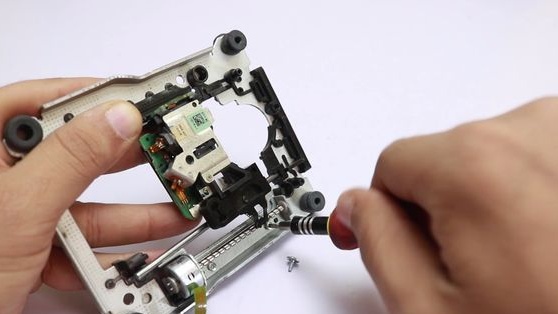
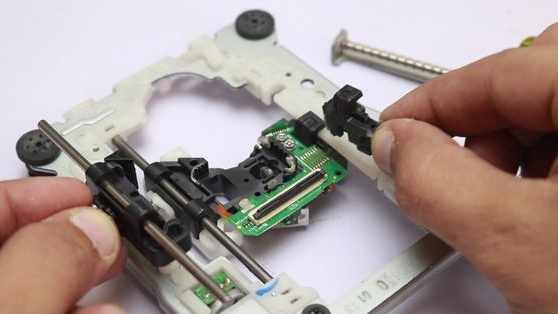
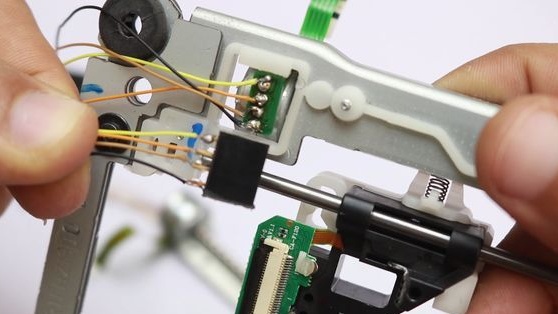
Smører vognen.
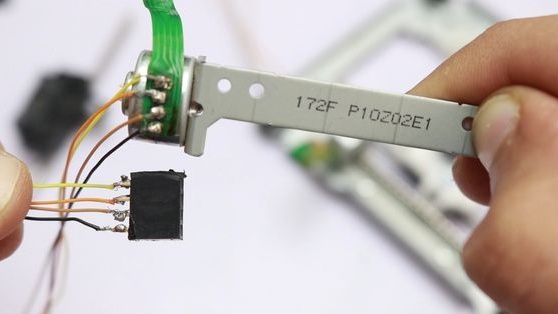
Soldater til å trå stepper motorer. Koblingen er loddet til ledningens andre ender.
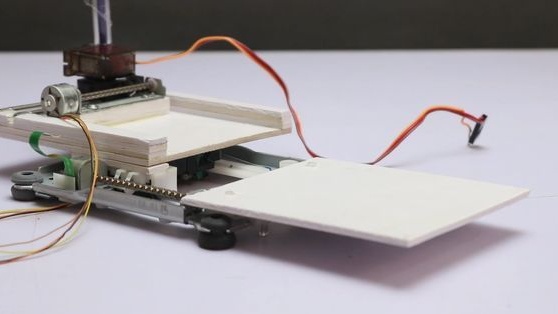
Trinn to: X-aksen og Y-aksen
Så av en planke (lenger på bordet) 10 * 9 cm. I kantene på bordet limer du stengene 2 * 10 cm.
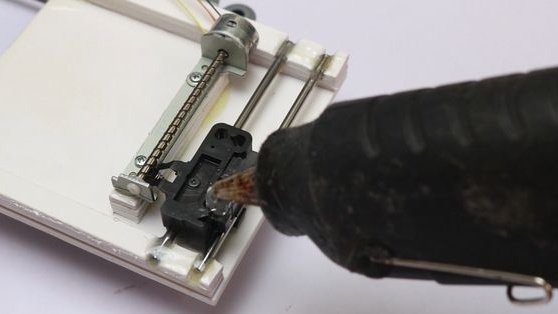
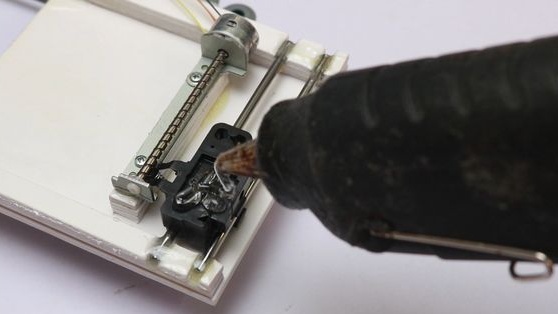
Skjær spor for vognførere. Lim guidene.

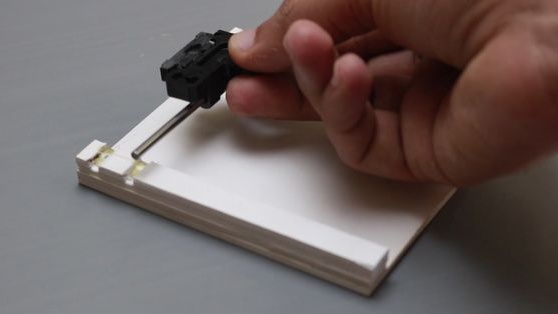
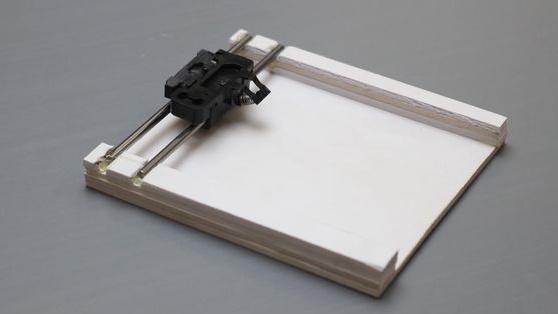
Ved siden av vognen limes en blokk på 3 * 5 cm. Skruer på trinnmotoren. Axis X er klar.
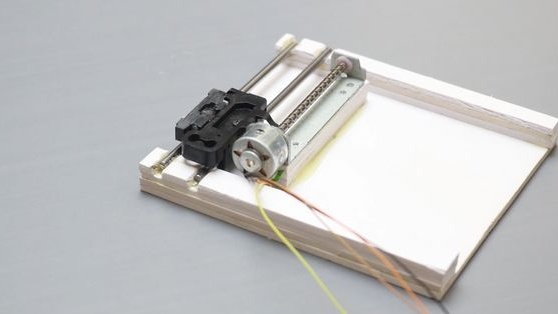
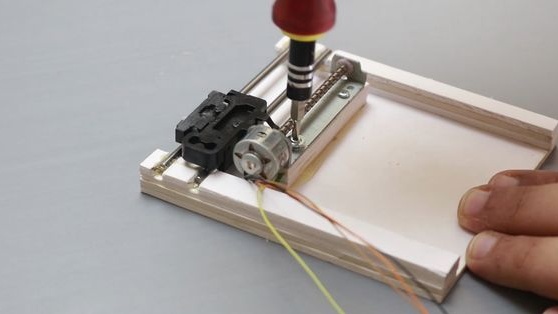
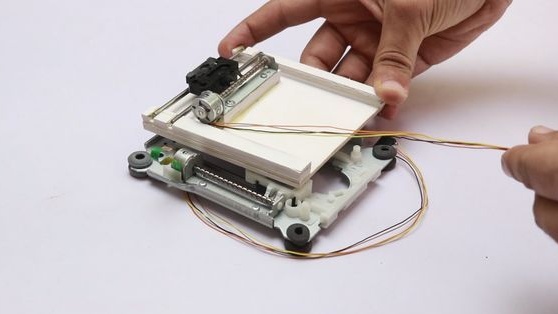
Limer X-aksemekanismen med Y-aksemekanismen.

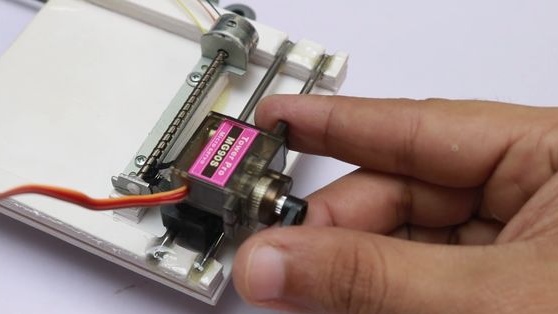
Fest servodrevet til vognen med skaftet vendt ut (se bilde)
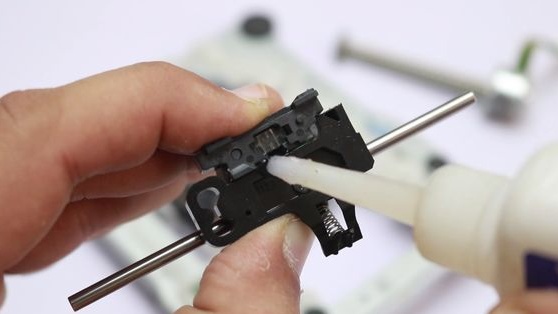
Trinn tre: Pen
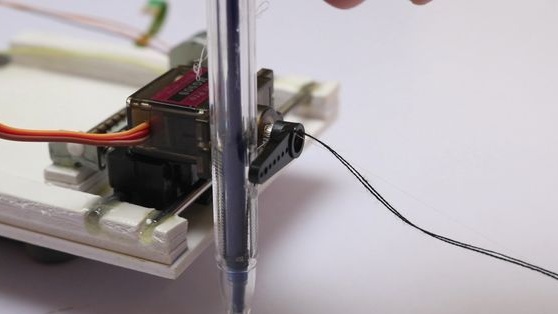
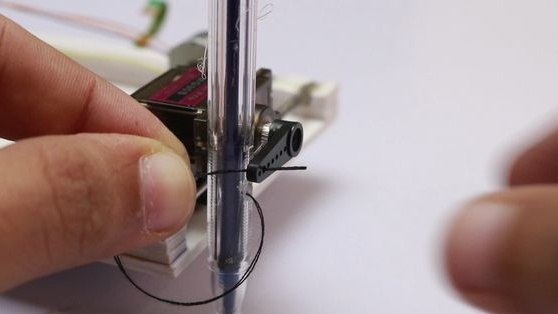
Tester en penn. Kutter 1 cm. Av den øvre enden av skaftet. Vri vårens halvdel på stangen. Når du har trukket deg tilbake ca. 1 cm fra bunnen av stangen, pakker du en tråd på den. Slips. I håndtaket lager du et hull. Trekker tråden inn i hullet. Monterer stangen på plass. Setter hetten.






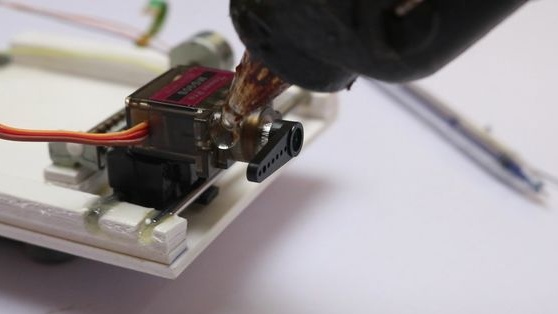
Lim håndtaket på servomotorens kropp (stangkulen hviler mot overflaten). Fest den andre enden av tråden til servospaken.
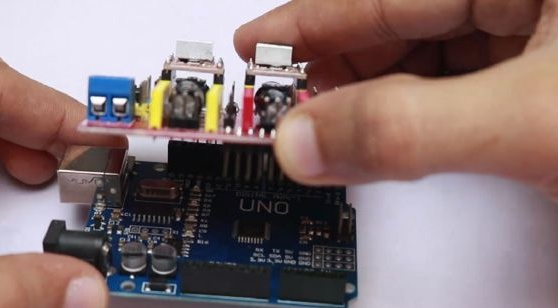
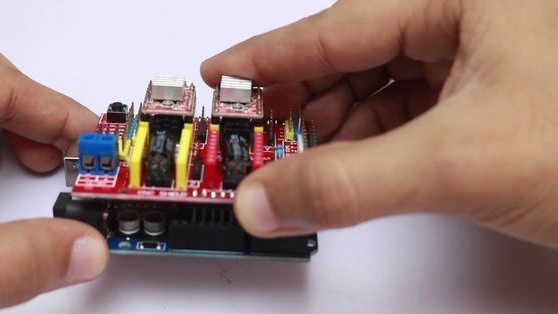
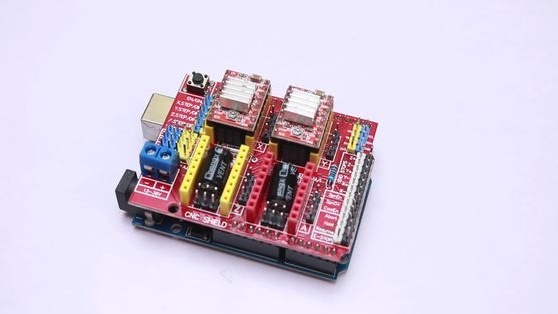
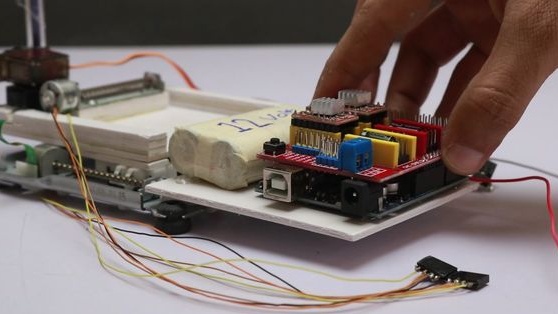
Trinn fire: Modulmontering
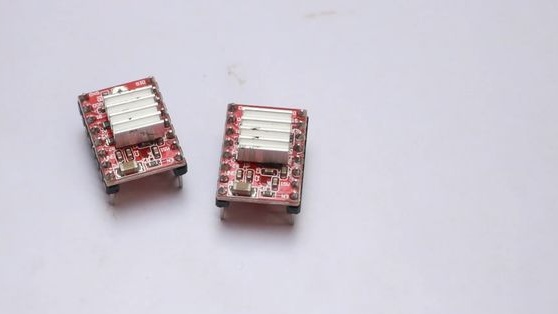
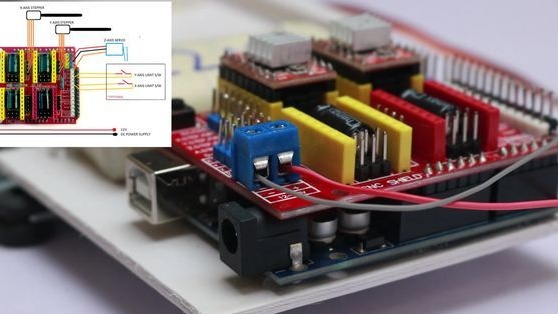
Installerer to trinnmotormoduler med radiatorer på utvidelseskortet.
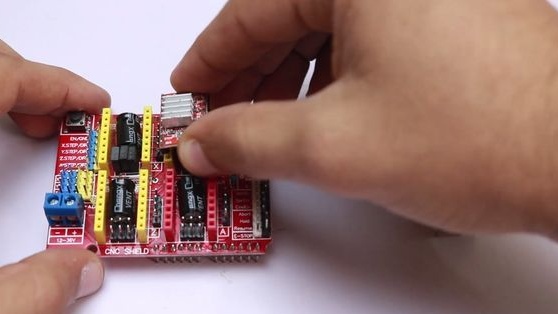
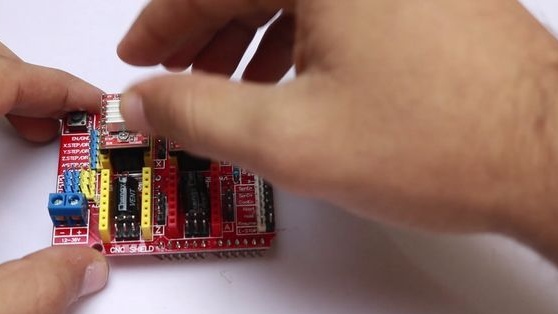
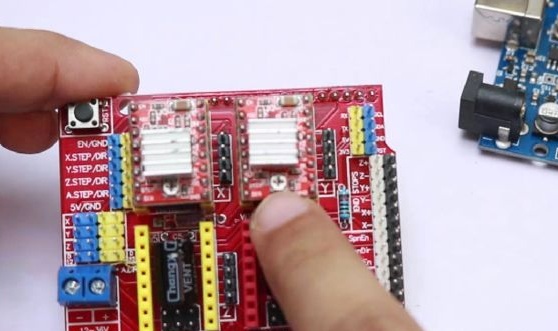
Installerer et utvidelseskort på Arduino.
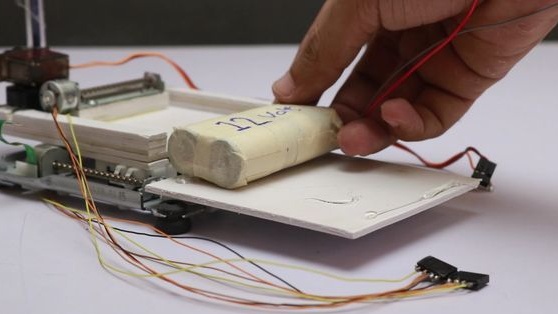
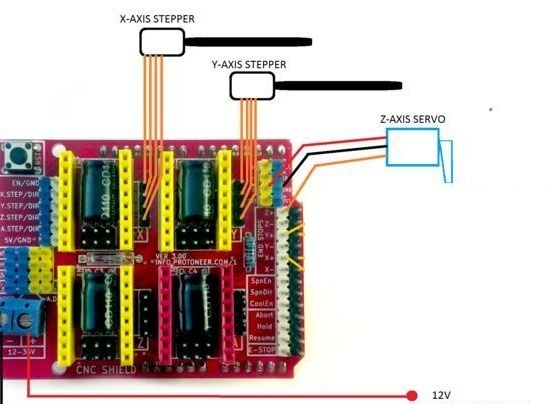
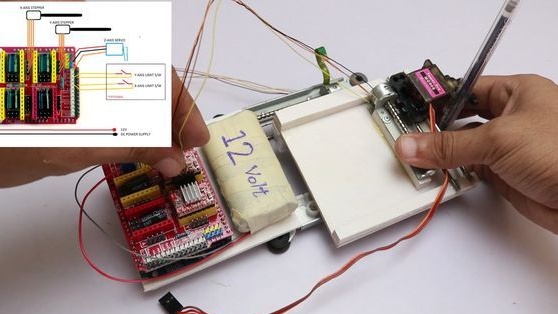
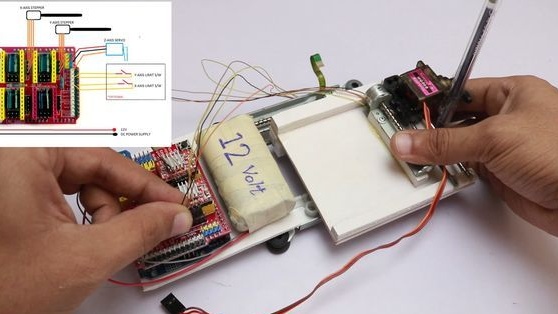
Trinn fem: Koble til
Installerer et batteri. Fester og kobler alle elementer i henhold til de gitte ordningene.
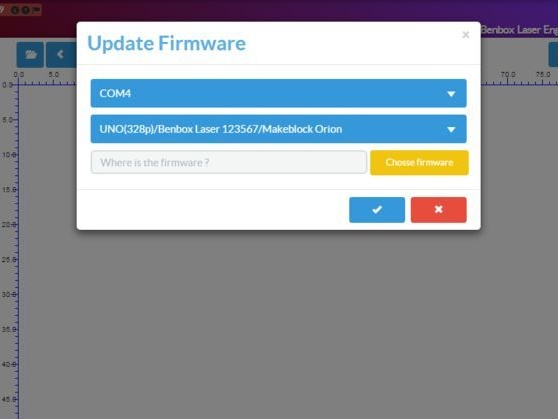
Trinn seks: Programvare
Laster inn programvare. Åpner programvare. Kobler til en Arduino USB-kontakt. Når du oppdaterer firmware, velger du COM (3.4 eller 5).
Stiller inn parametrene.
Første side:
Seriell port: COM (3.4 eller 5)
Pen Up: 35
Penn ned: 22
Hastighet: 800 (du kan øke)
Tid: 200
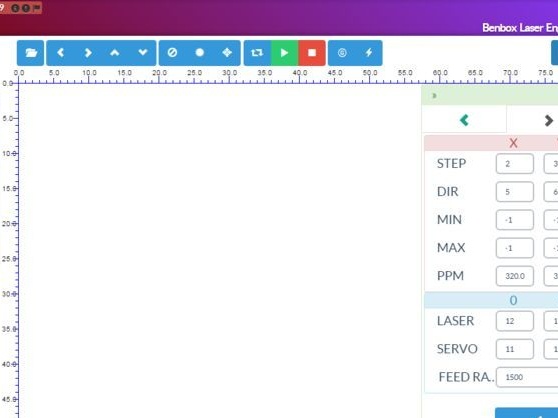
Andre side:
Trinn: x = 2 y = 3
Dir: x = 5 y = 6
Min: x = -1 y = -1
Maks: x = -1 y = -1
Ppm: x = 320 y = 320
laser: 0 = 12 1 = 12
Servo: 0 = 11 0 = 12
Feed Ra. : 1500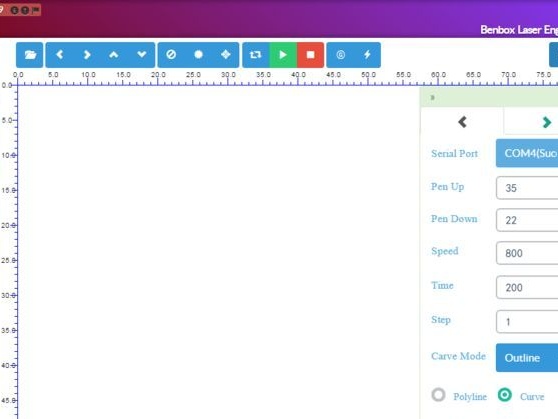
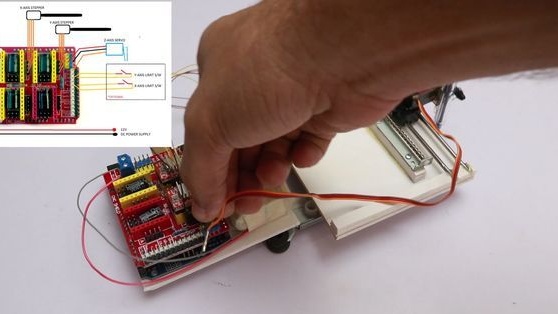
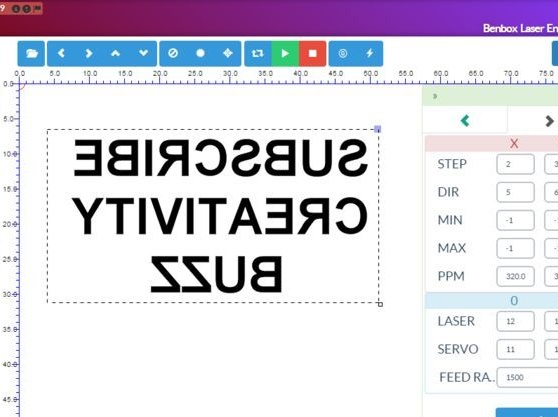
Robotartisten er klar. Det gjenstår å legge inn tekst i feltet og kjøre programmet.
Hele prosessen med å lage en robotartist kan sees i videoen.