
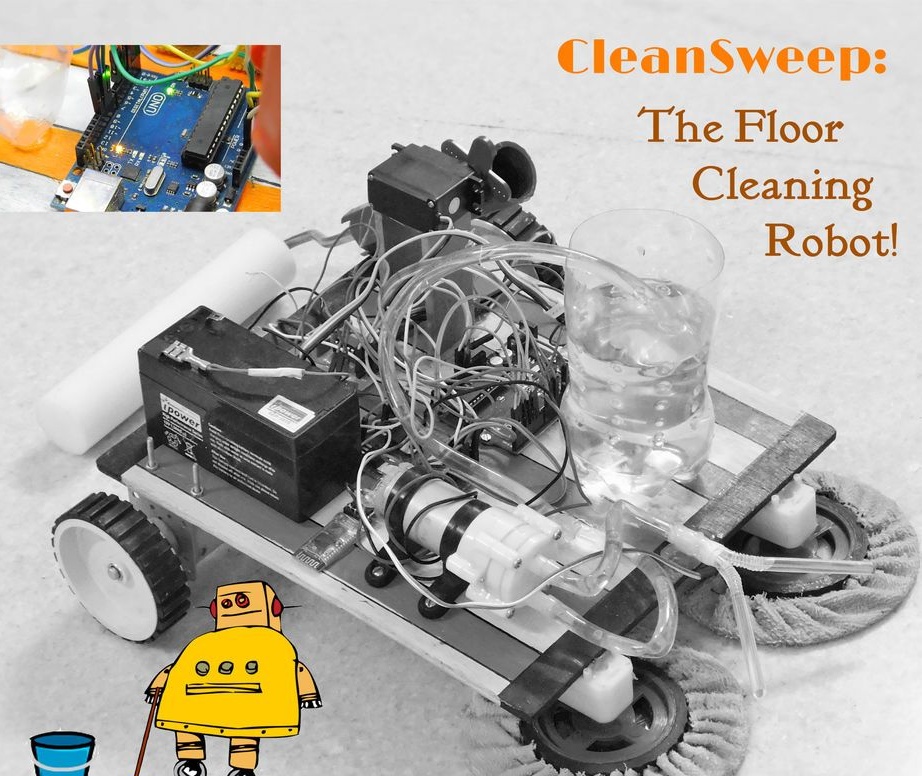


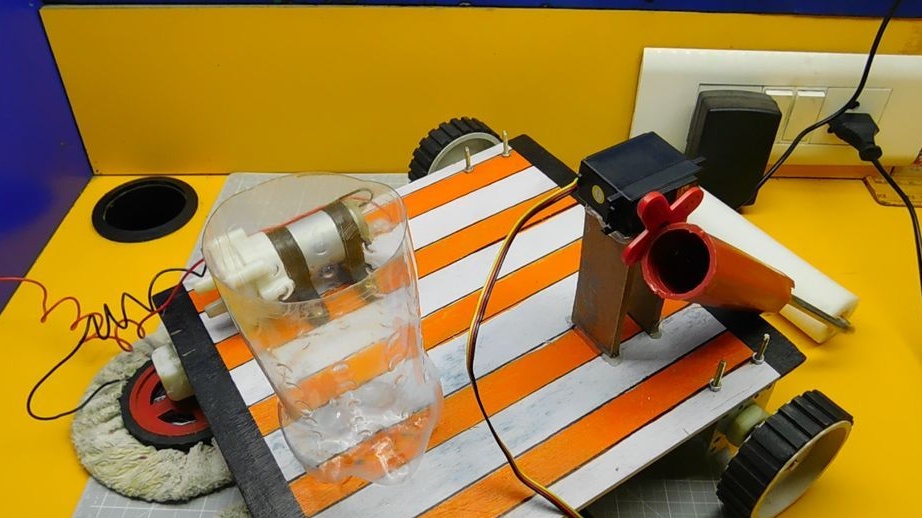
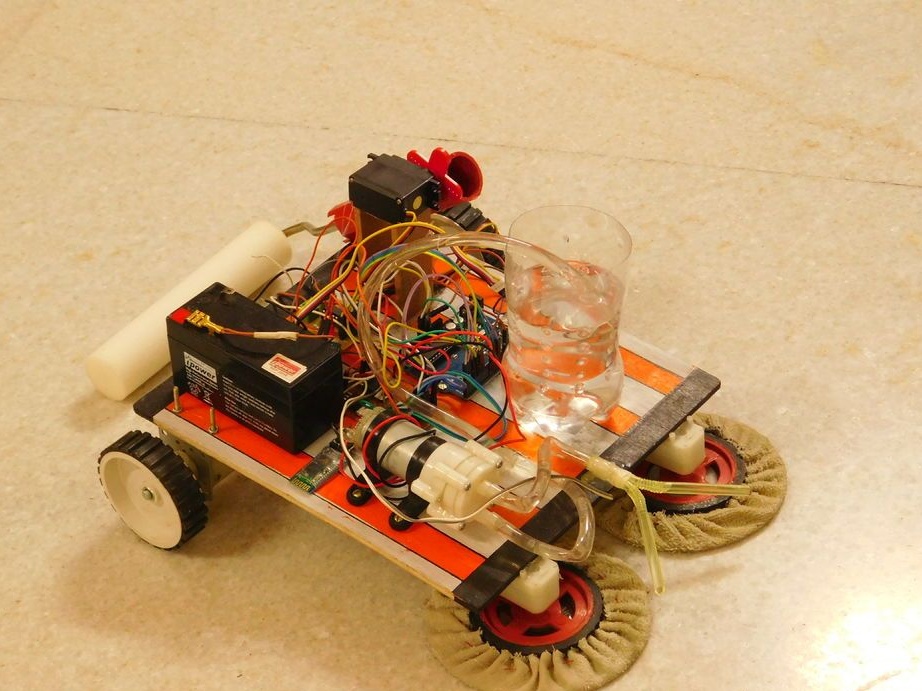
RobotenHøstemaskinen har i sitt arsenal to roterende børster montert foran på girmotorakselen. Girkassen roterer med en hastighet på 75 o / min. Roboten har en vanntank om bord. En rulle er festet bak på roboten. Roboten er blandet ved hjelp av hjul festet på aksen til girmotoren. Renholderen styres av smarttelefon via Bluetooth. I fremtiden planlegger mesteren å gjøre roboten fullstendig autonom. La oss se hvordan denne enheten fungerer.
Verktøy og materialer:
-Motorutstyr 100 o / min -2 stk;
-Hjul for motoren -2 stk;
-Motorreduserende med et hjul på 75 o / min - 2 stk;
-Arduino UNO;
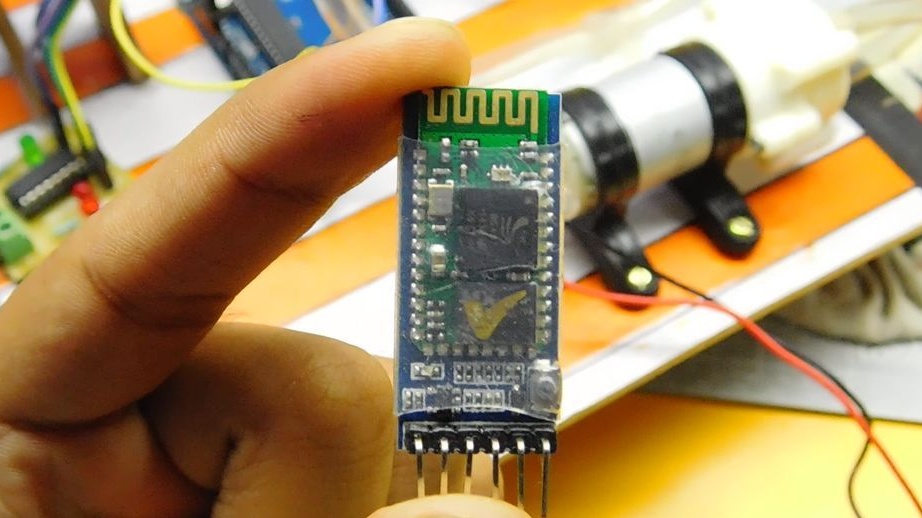
- Bluetooth-modul HC-05/06;
-Driver L293D;
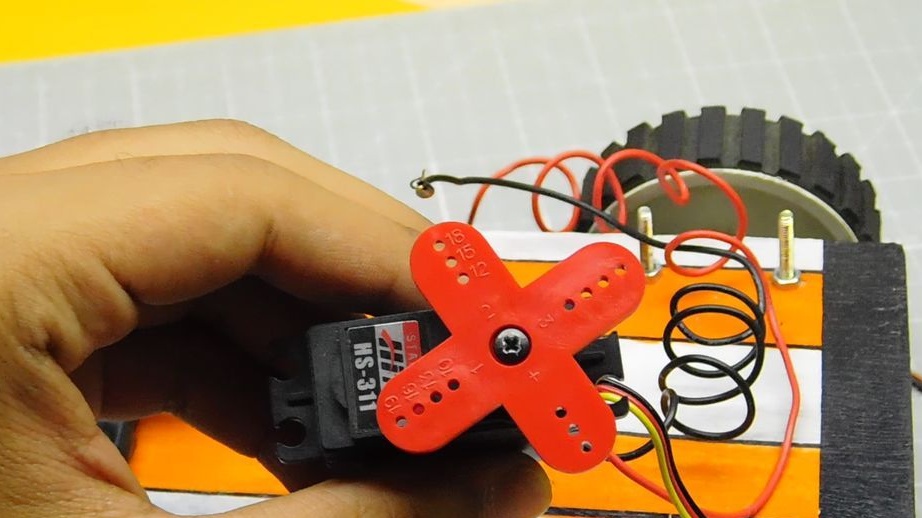
- Servomotor (180 graders rotasjon);
-12V batteri;
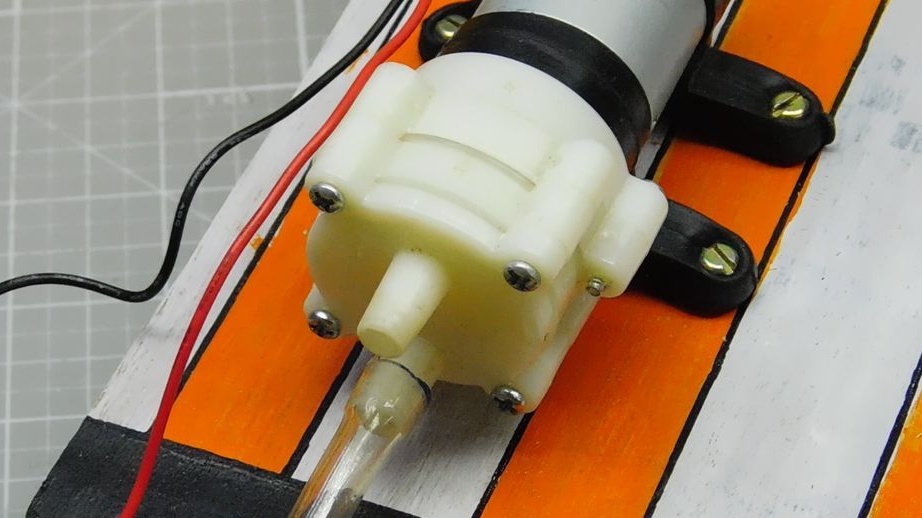
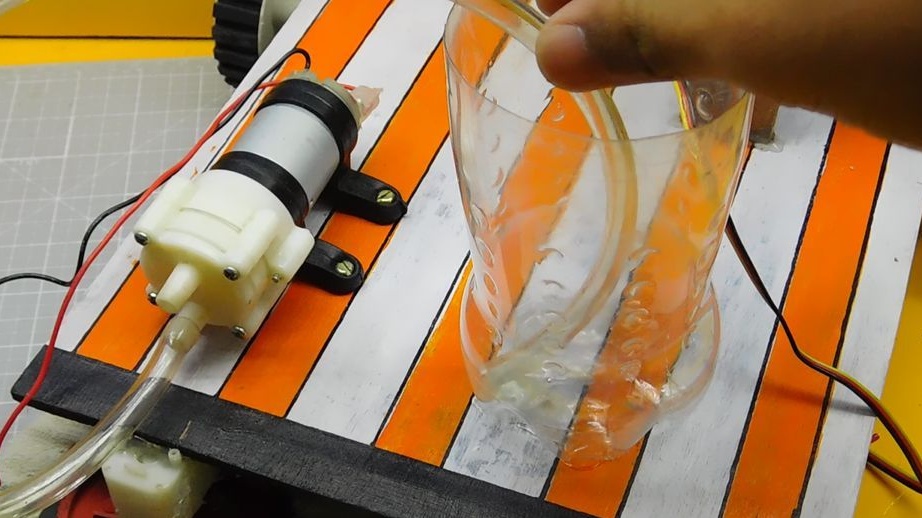
- Pumpe 12 V;
Transistor TIP31C;
Transistor TIP122;
- CD-stasjon - 2 stk .;
- Paint roller;
- Klut servietter;
- Nål med tråd;
-Trubka;
seeing-;
- Hoppere;
-Monteringstavle;
-Krepezh;
-Fanera;
-Plastflaske;
Loddejern;
Limpistol;
-Drel;
- Tenger;
-Dremel;
- børste;
-Colors;
-Marker;
- saks;











Trinn en: Stiftelse
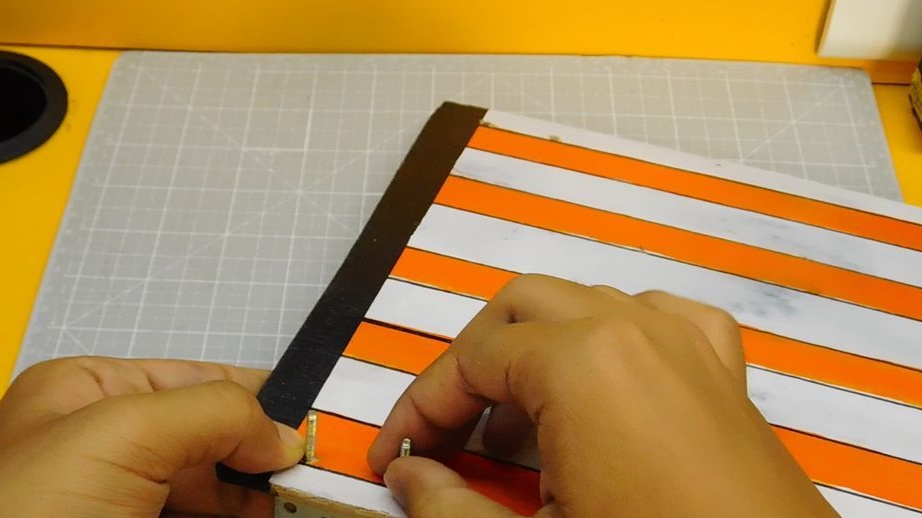
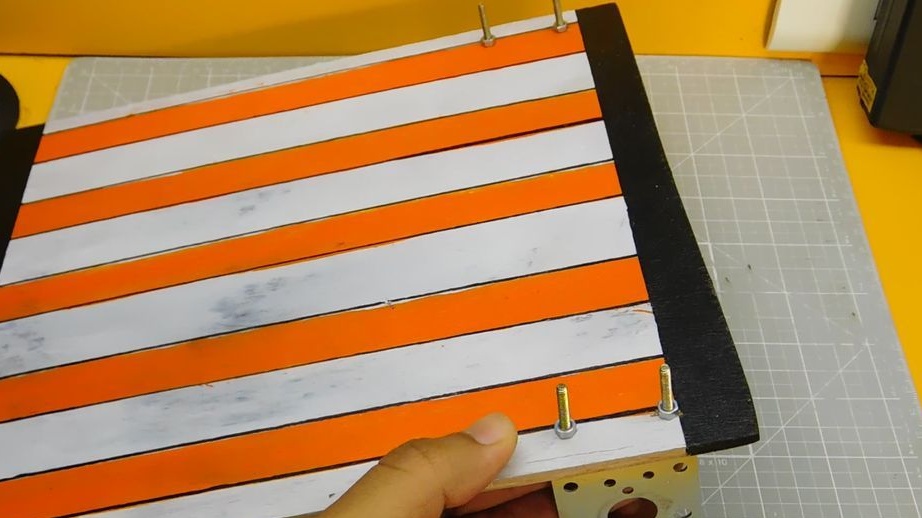
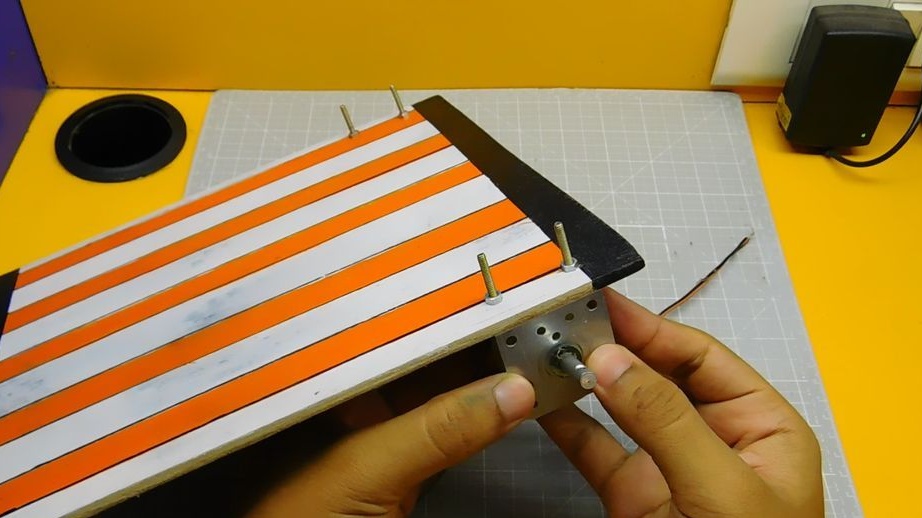
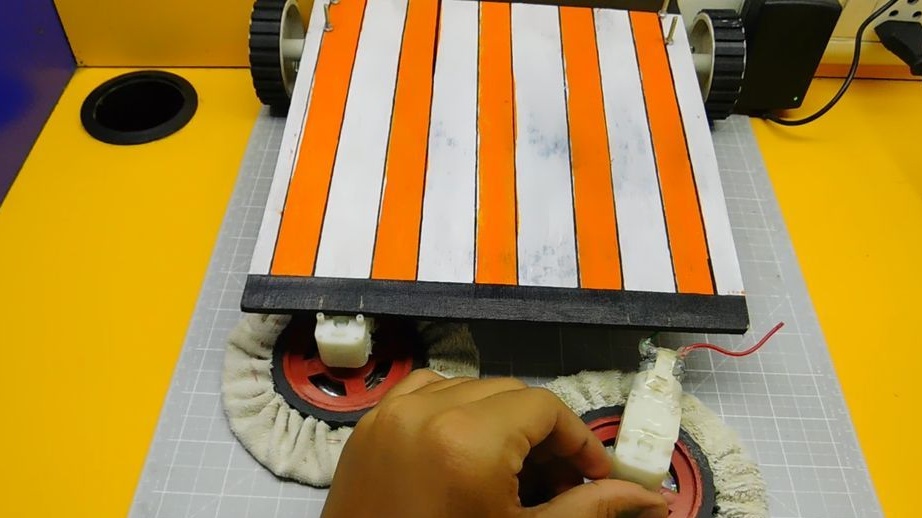
Fra kryssfiner kutter basen. Størrelsene på basen er 30 * 22 cm. Maler grunnlaget. På den ene siden fikser den girmotoren. Koaksialt fester girmotoren på den andre siden av sokkelen.


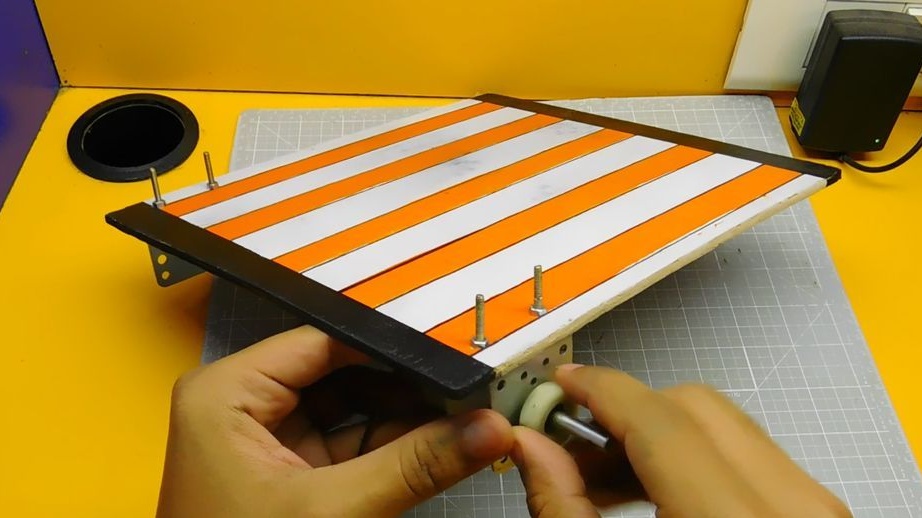

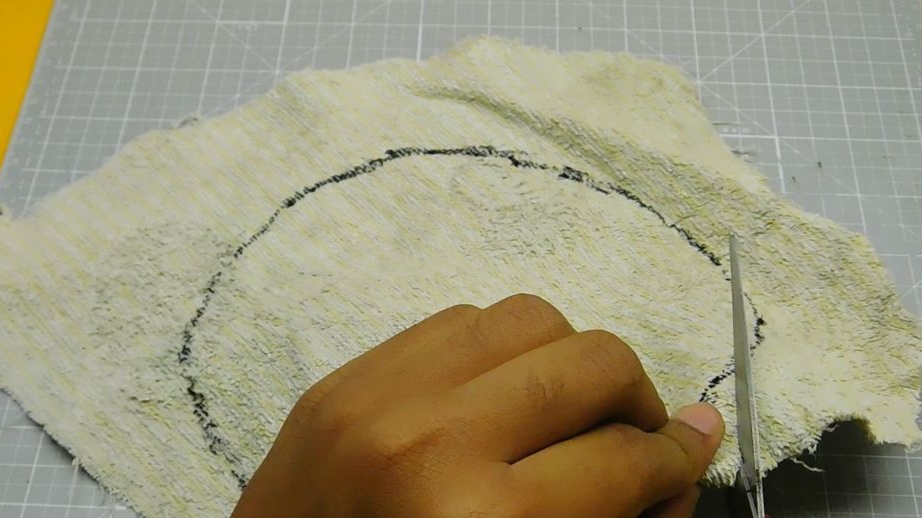
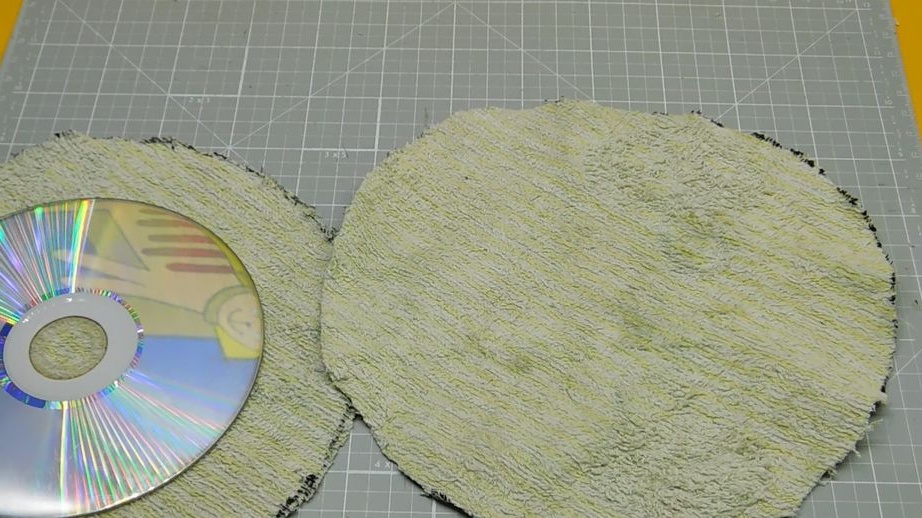
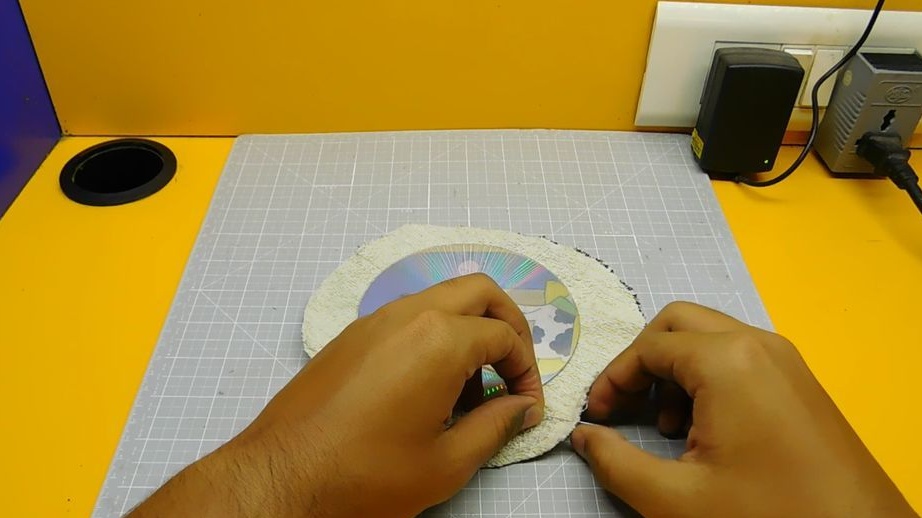
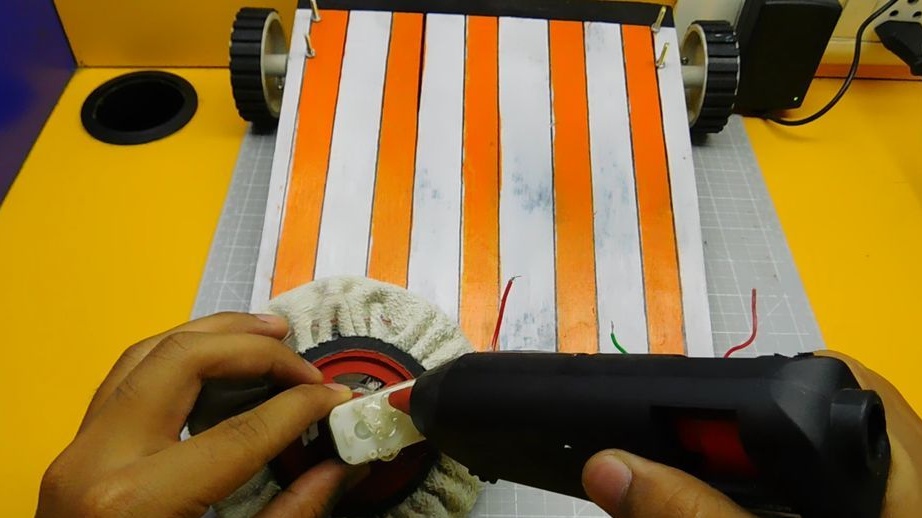
Trinn to: Børster
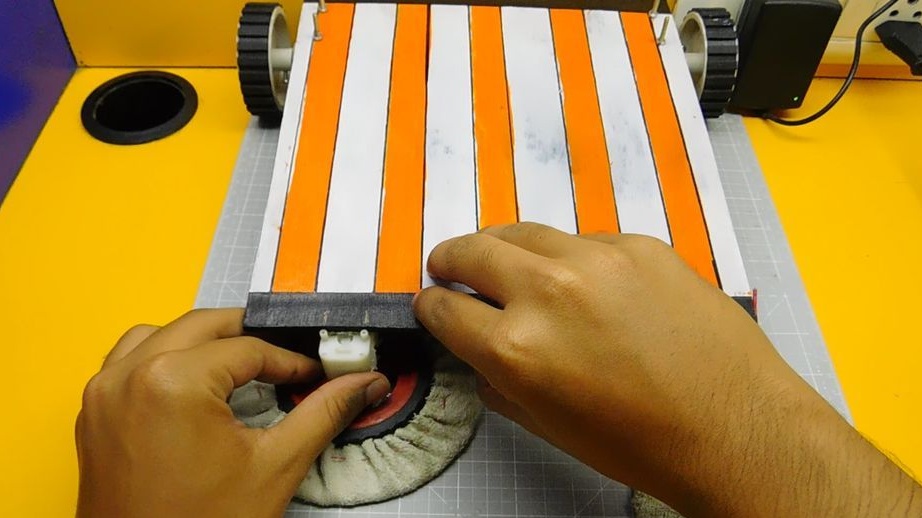
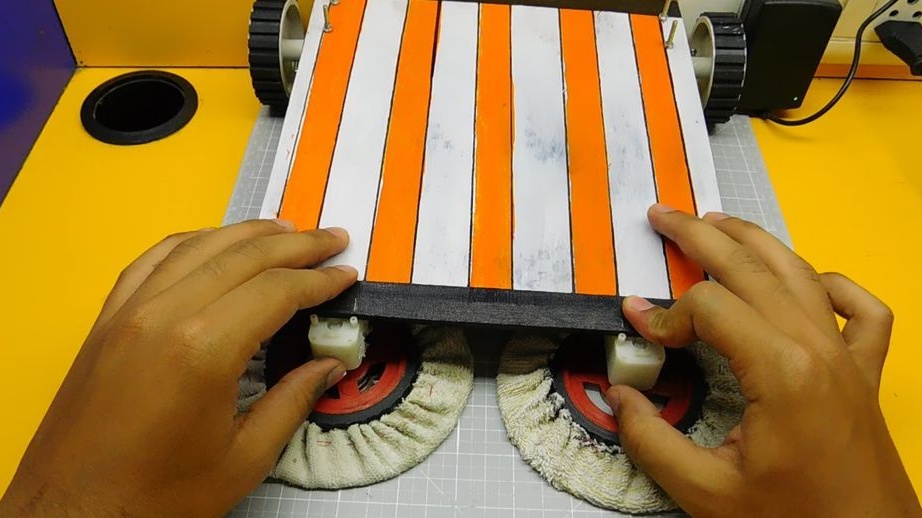
Mesteren lagde børster fra gamle CD-er. Skjær en fille. Lidd kjøret hennes. Gjentatt operasjon med en annen disk. Fest platene med smeltlim på girmotorhjulet. Sikret begge girmotorene foran plattformen.








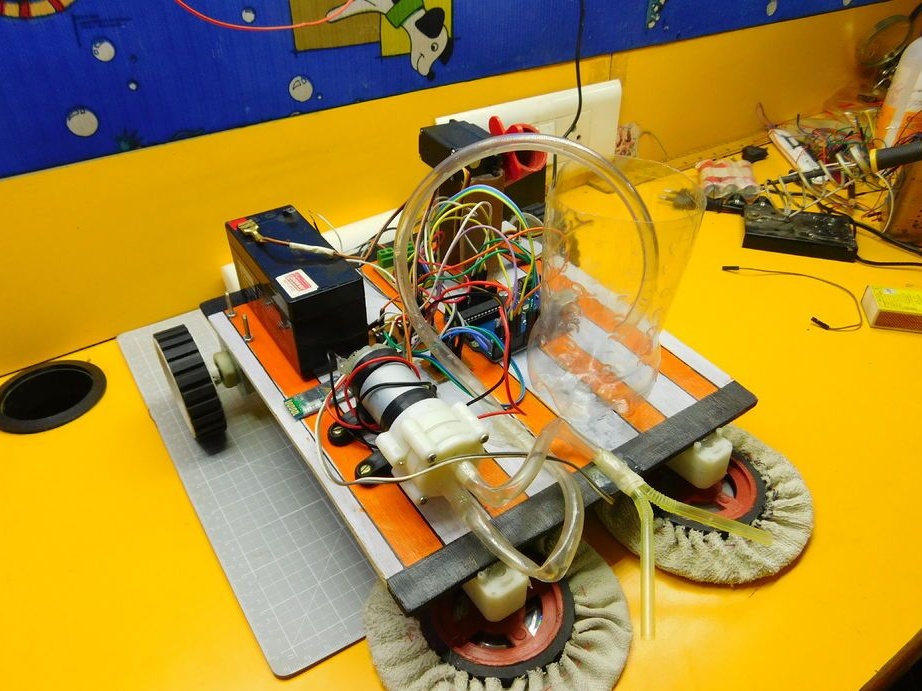
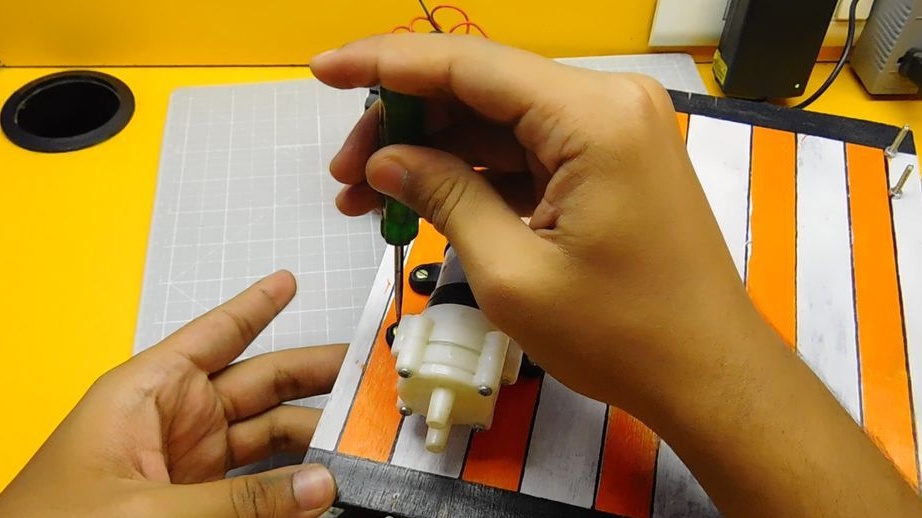
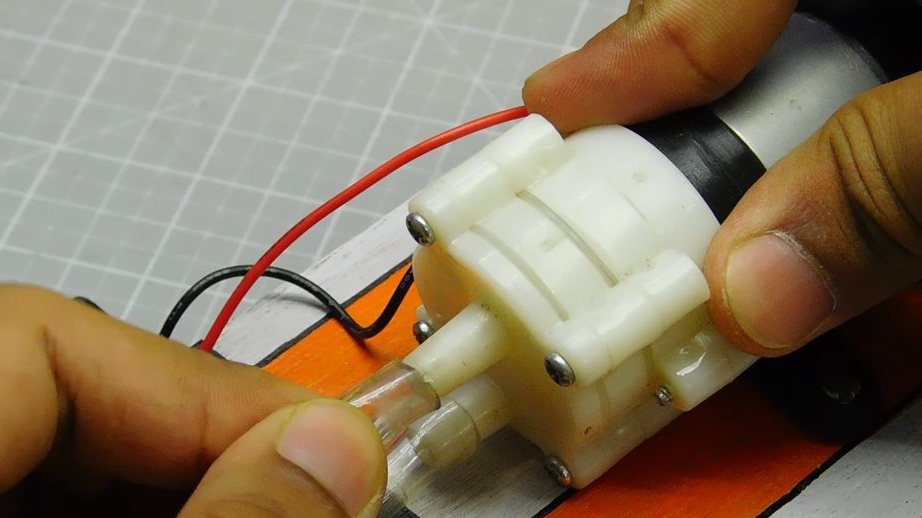
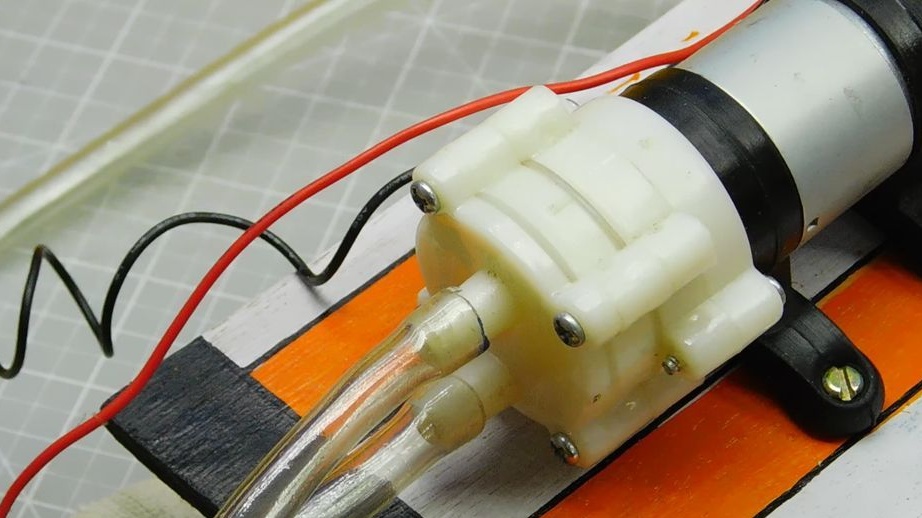
Trinn to: Vannforsyning
Fest pumpen til plattformen. Kutter av toppen av en plastflaske. Fest flasken til plattformen. Installerer et vanninntaksrør. Senere vil vanntilførselsrøret til børstene være fikset.




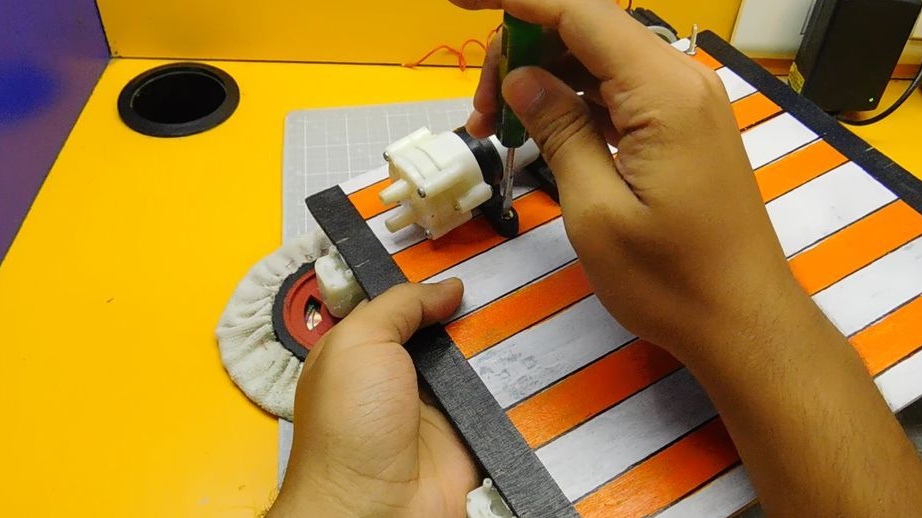
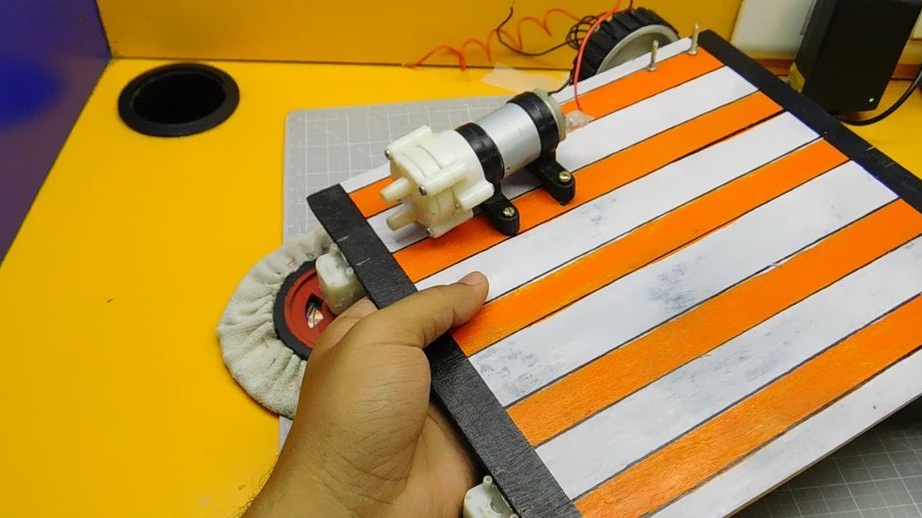




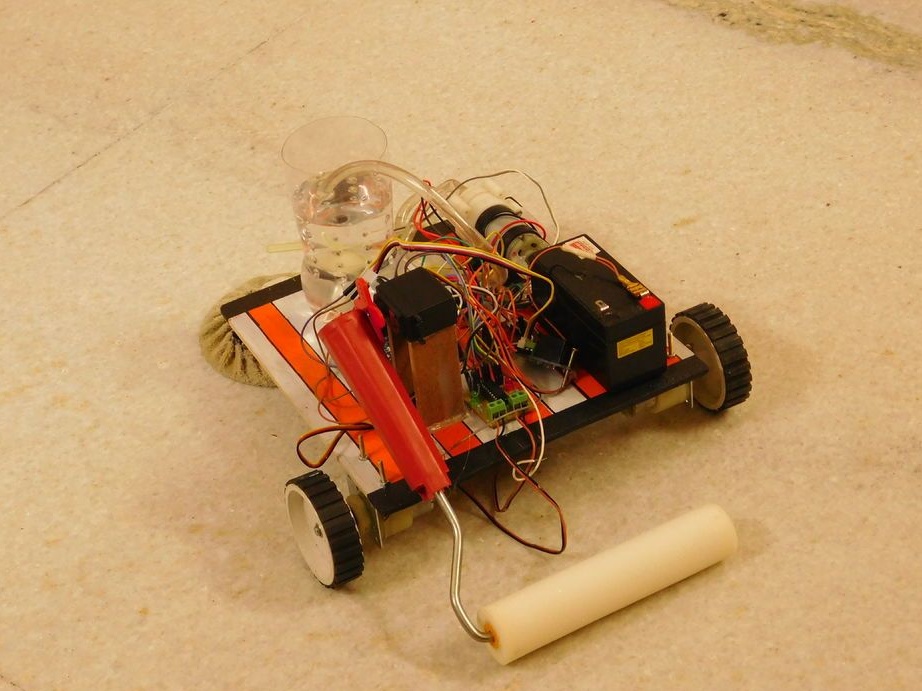
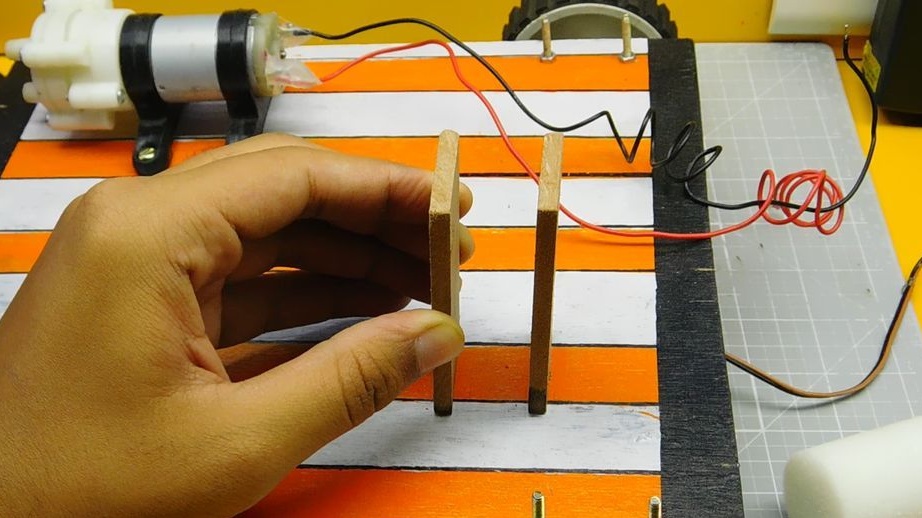
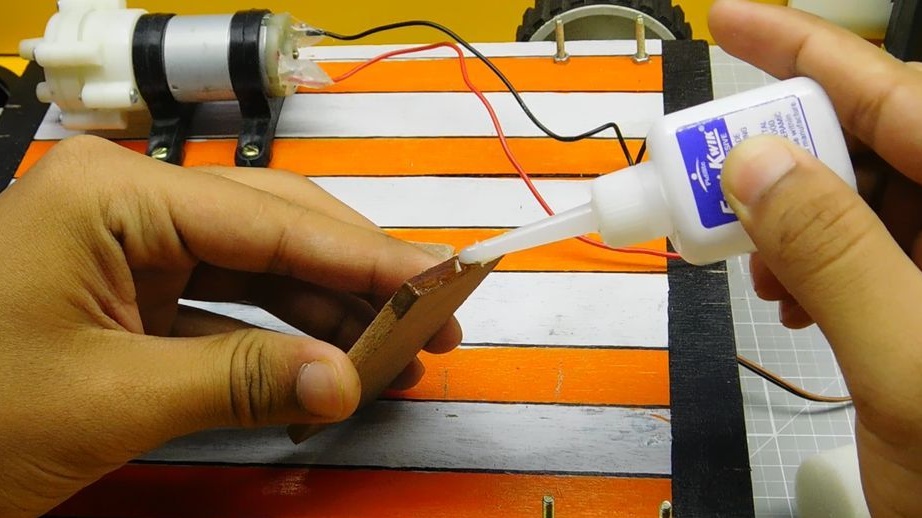
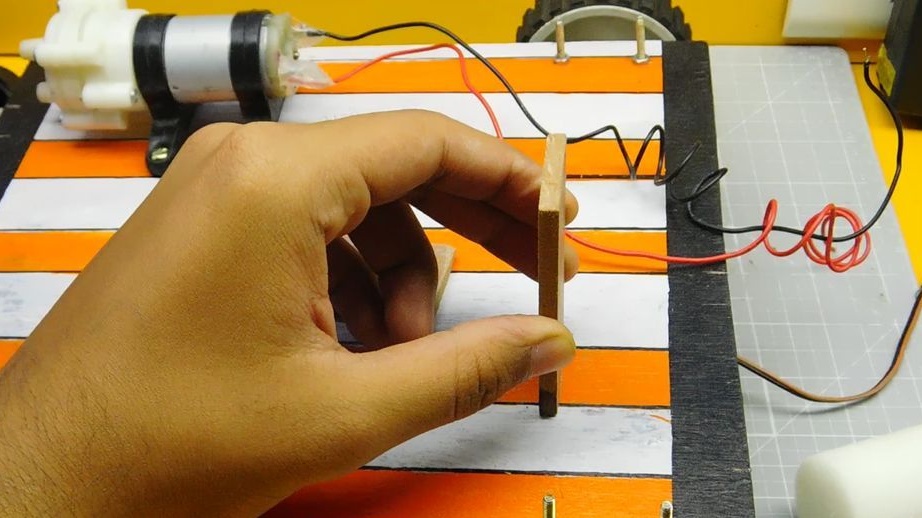
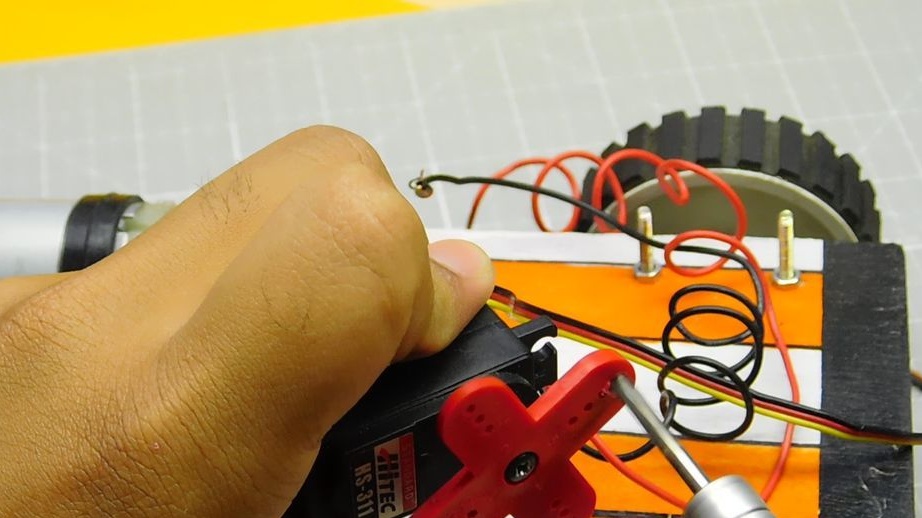
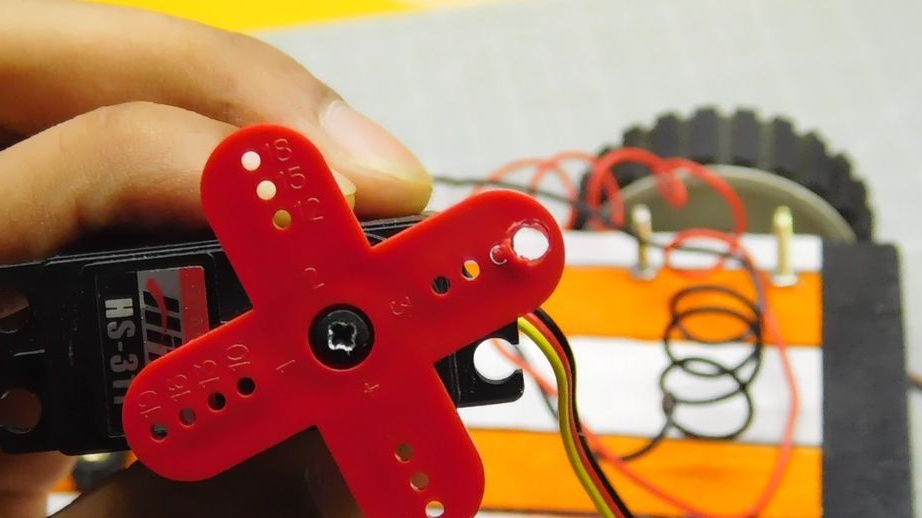
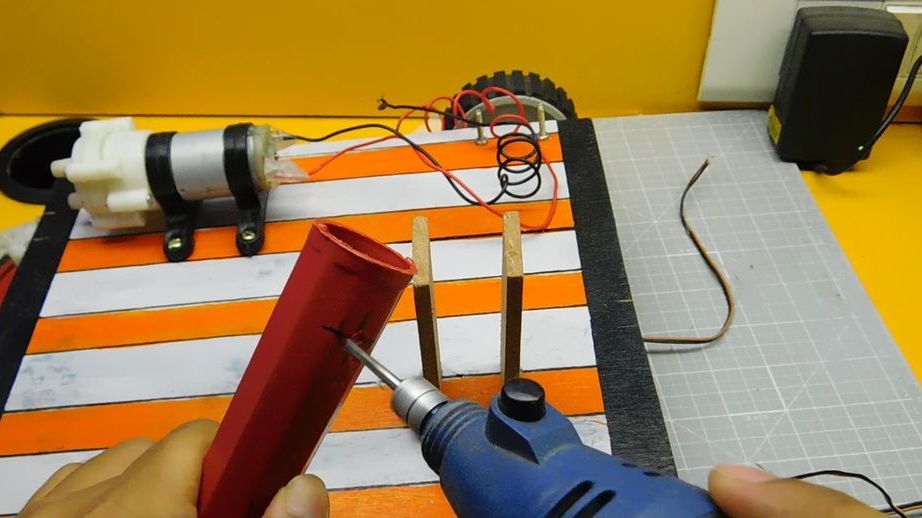
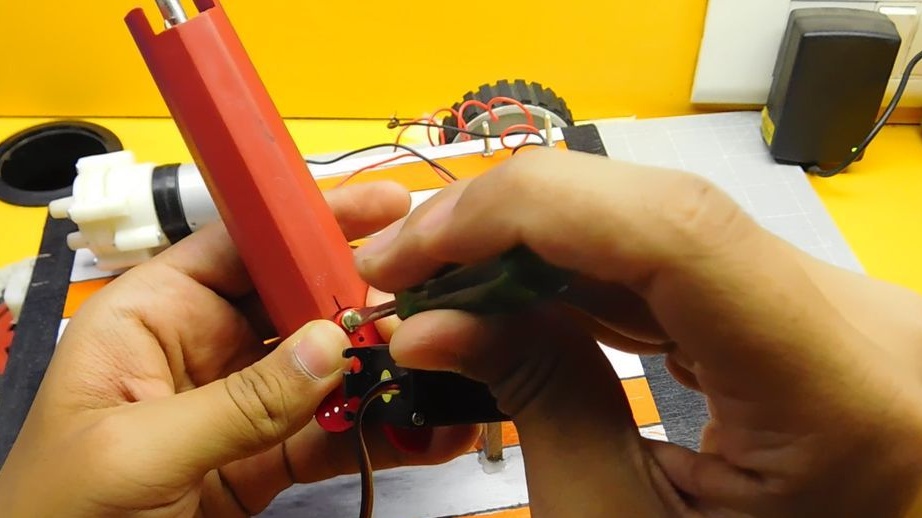
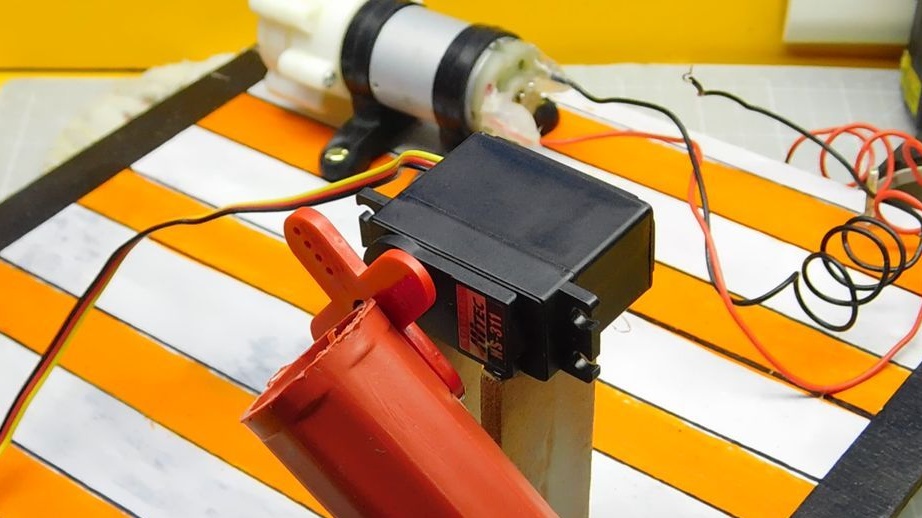
Trinn tre: Roller Lift Mechanism
Rullens oppgave er å samle fint støv. Siden rullen noen ganger er nødvendig, bestemte mesteren seg for å lage en mekanisme for å heve og senke rullen. Fester to lameller på plattformen parallelt med hverandre. Lager to hull, ett i servospaken, det andre i rullehåndtaket. Skru rullehåndtaket til spaken. Fest servoen til lamellene.


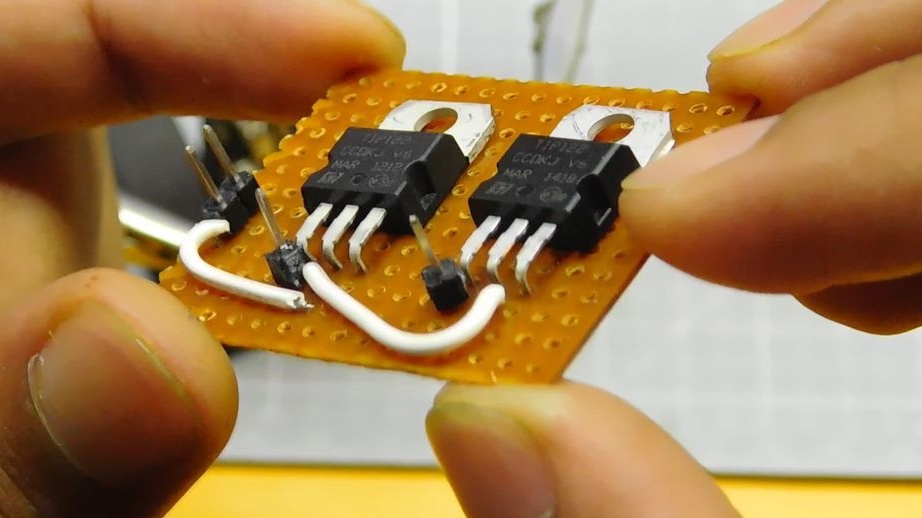
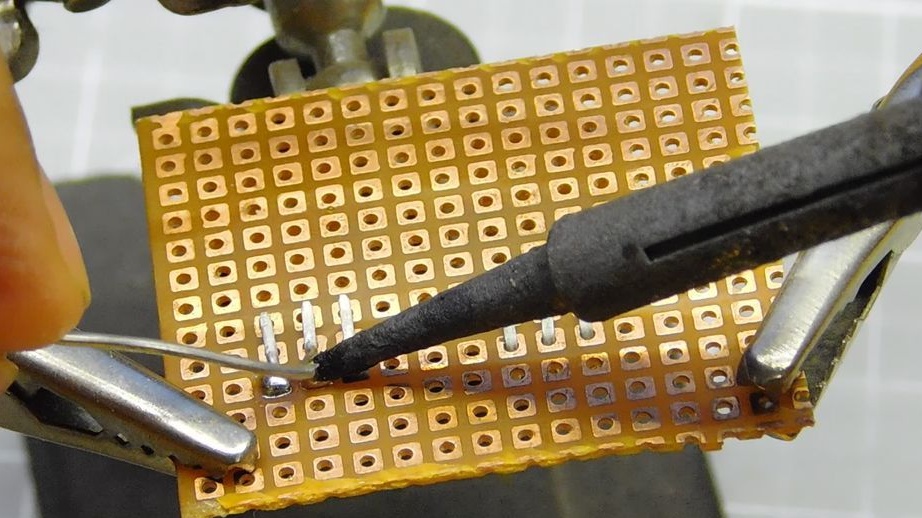
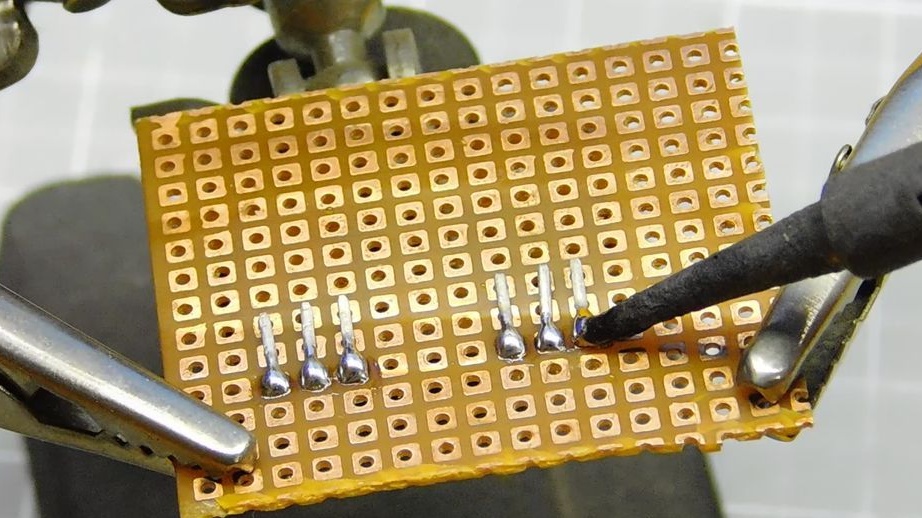
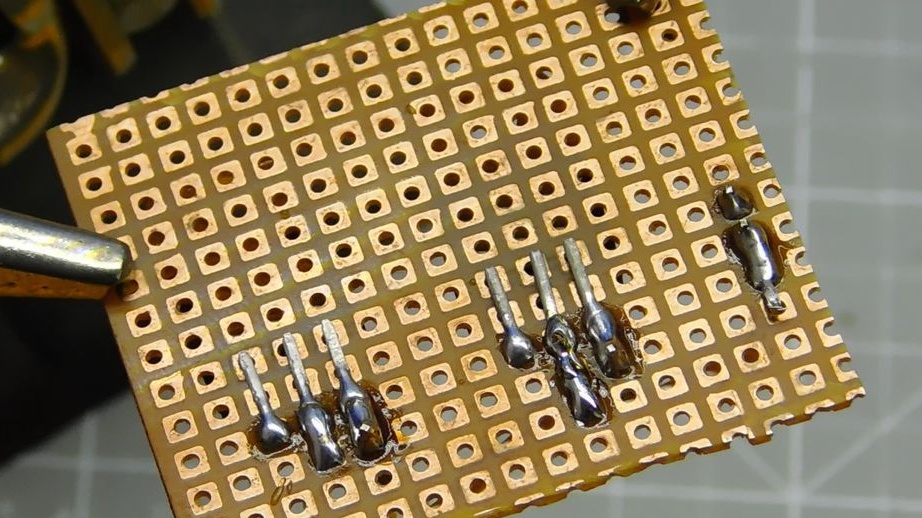
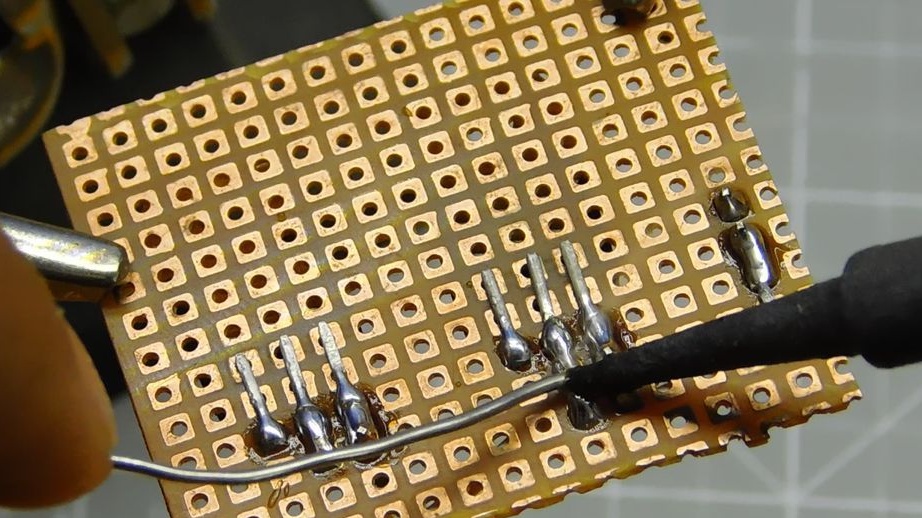
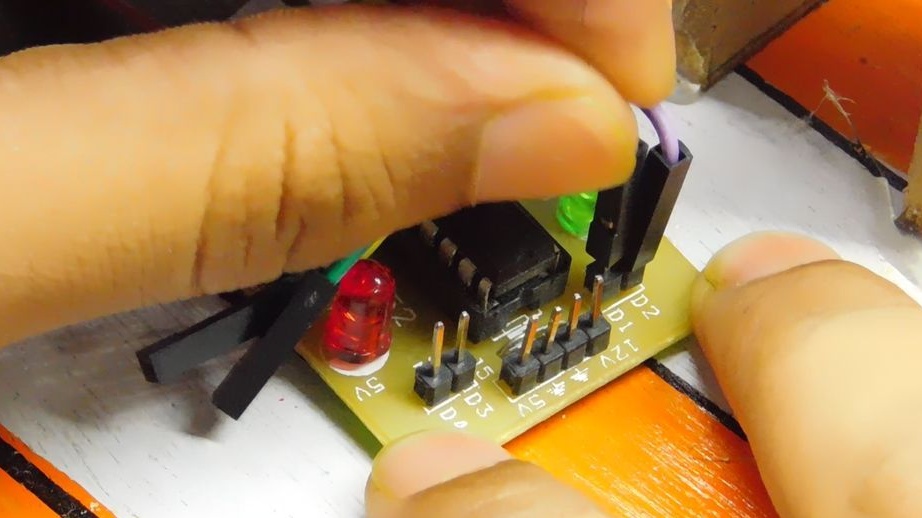
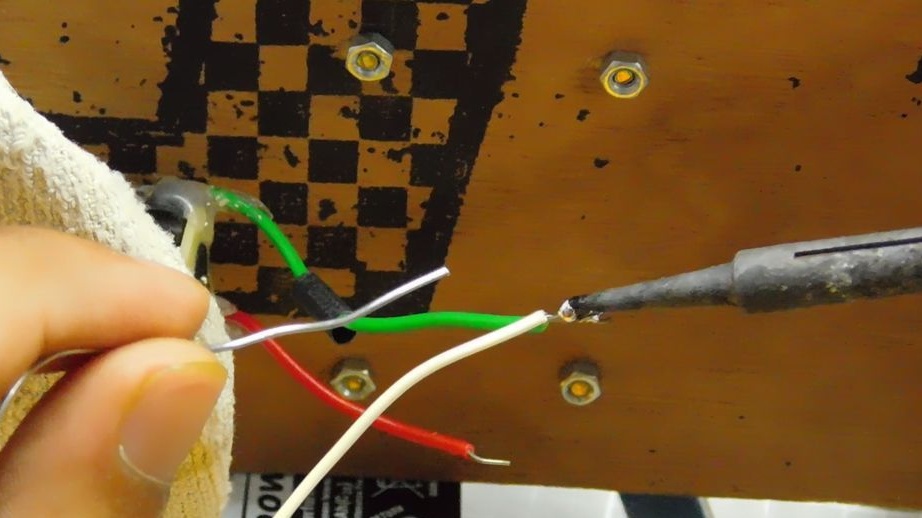
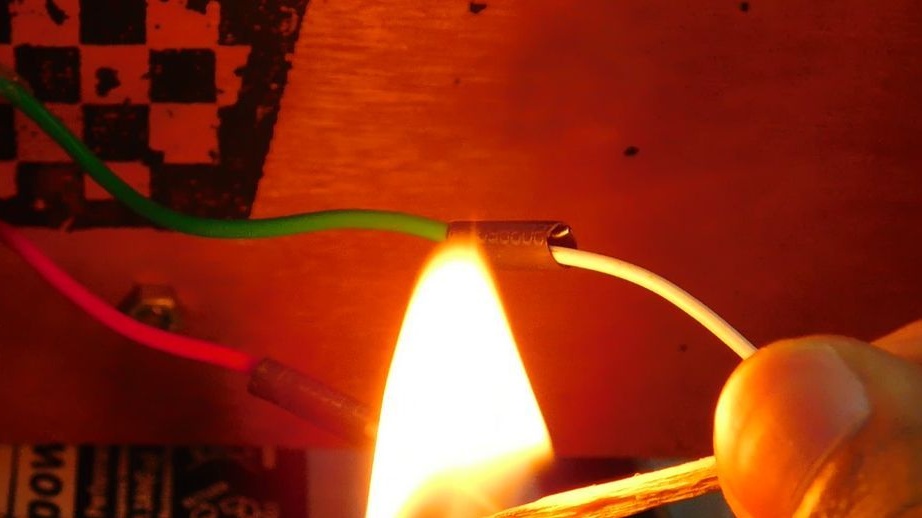
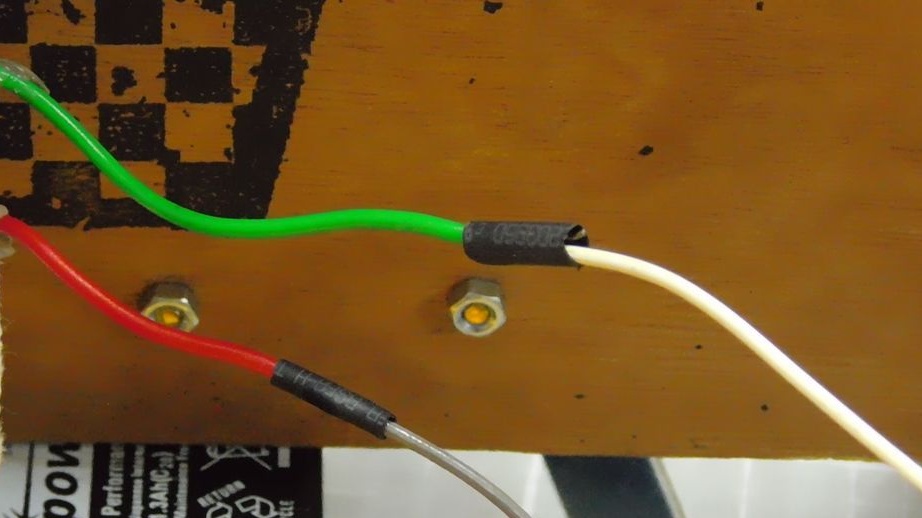
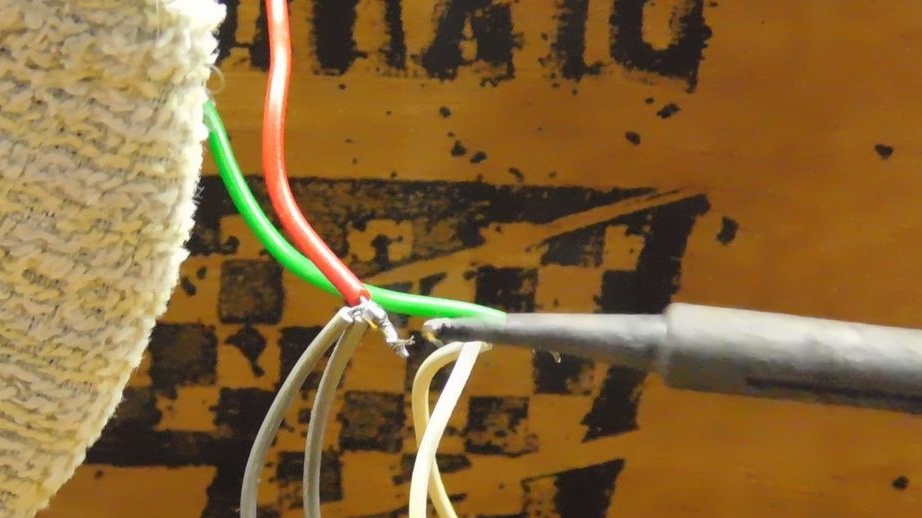
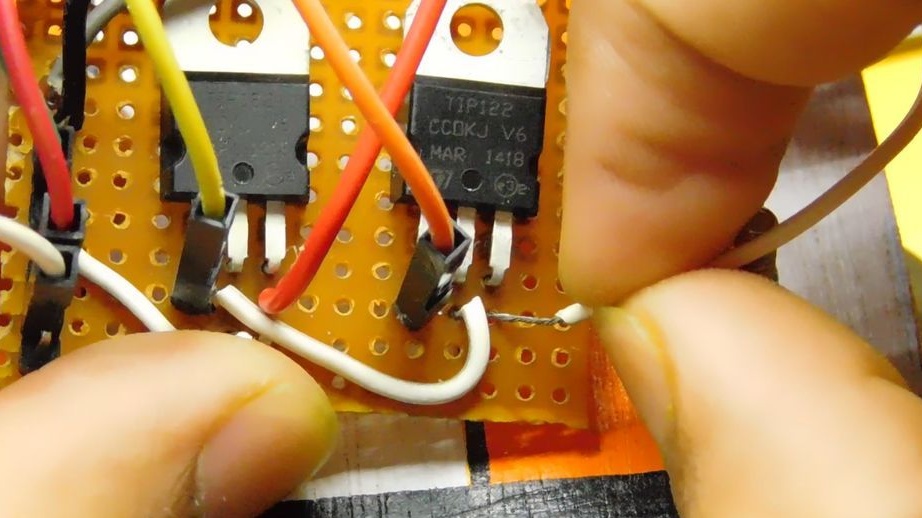
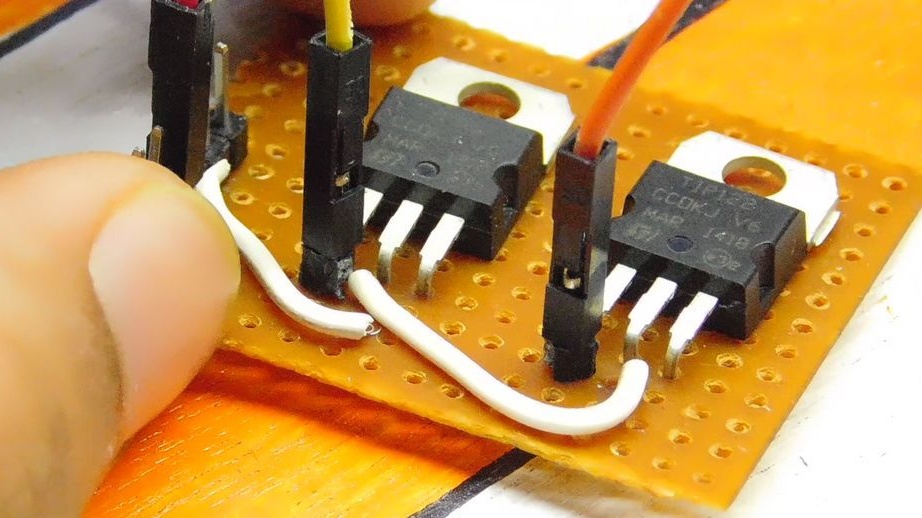
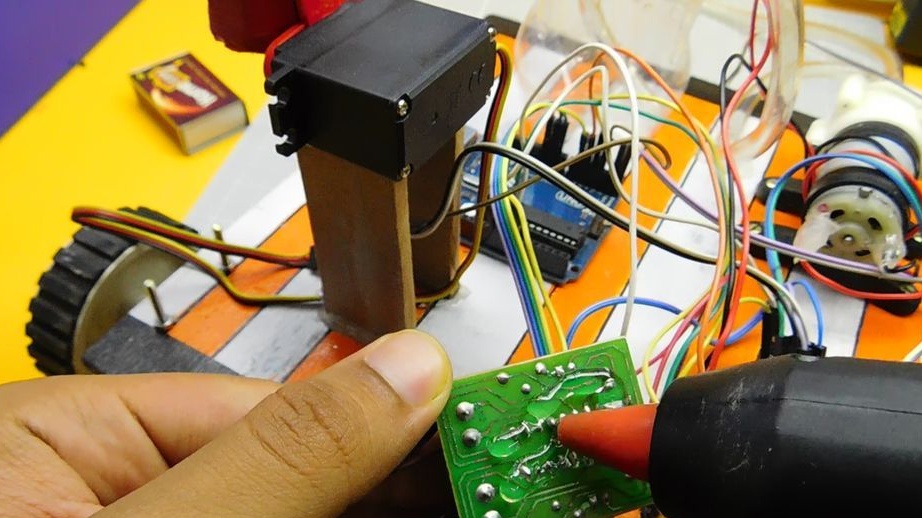
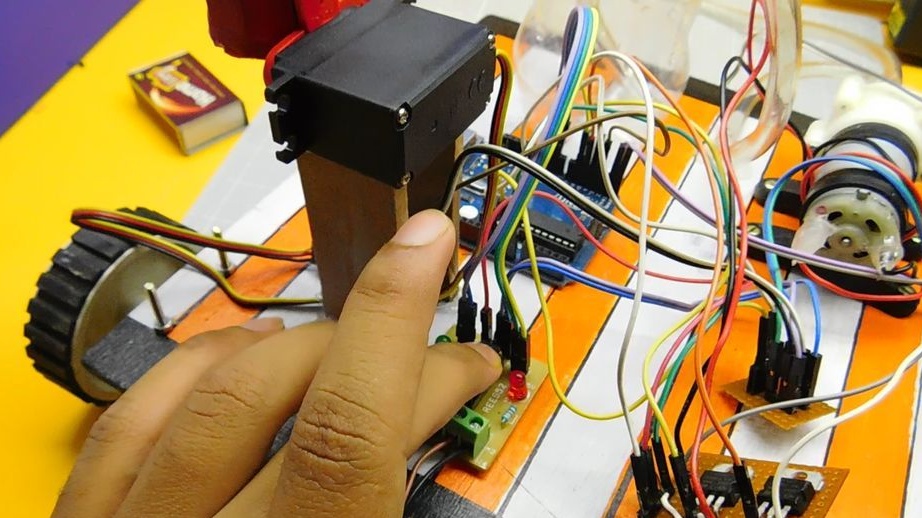
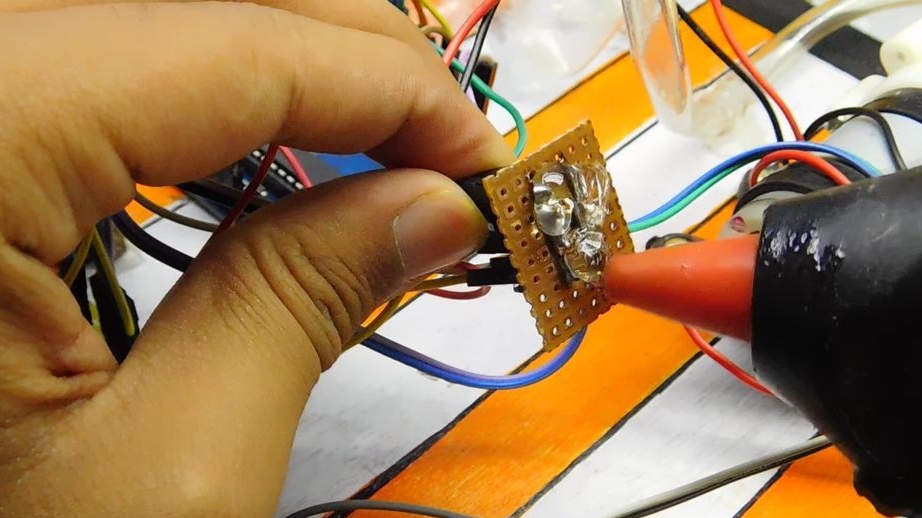
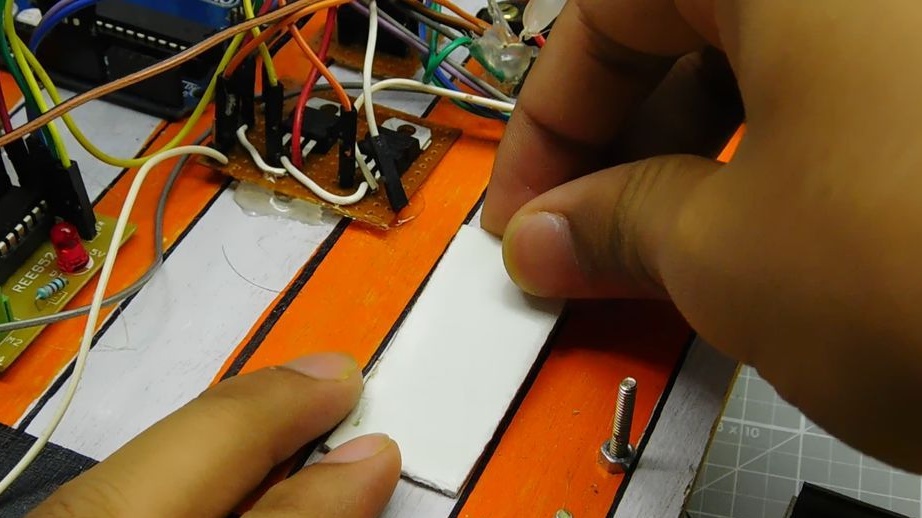
Trinn fire: Transistor
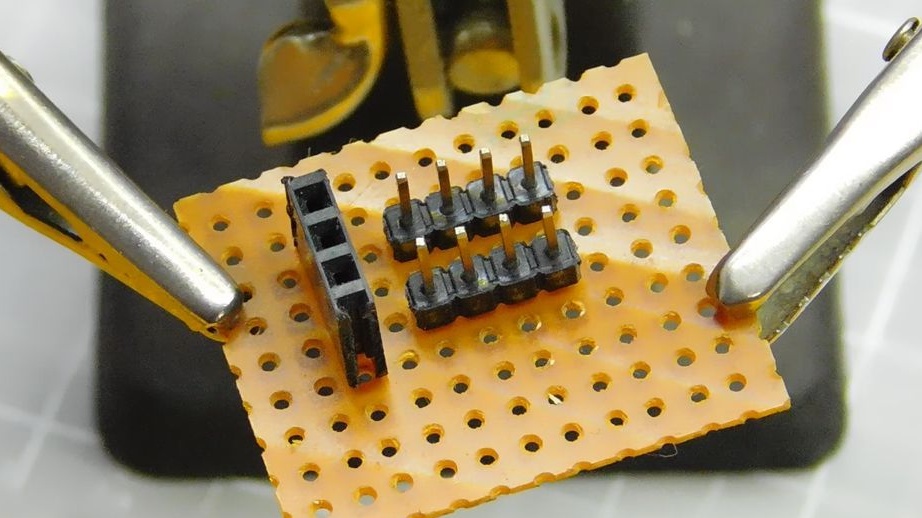
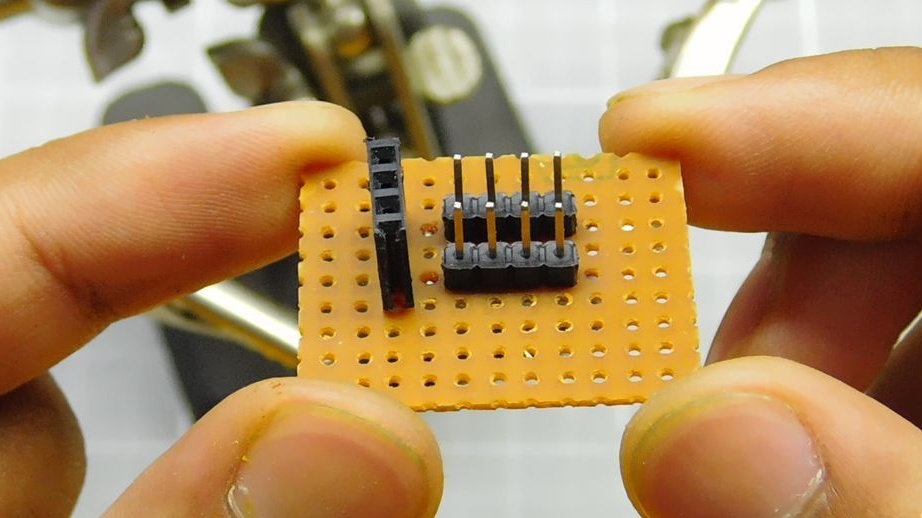
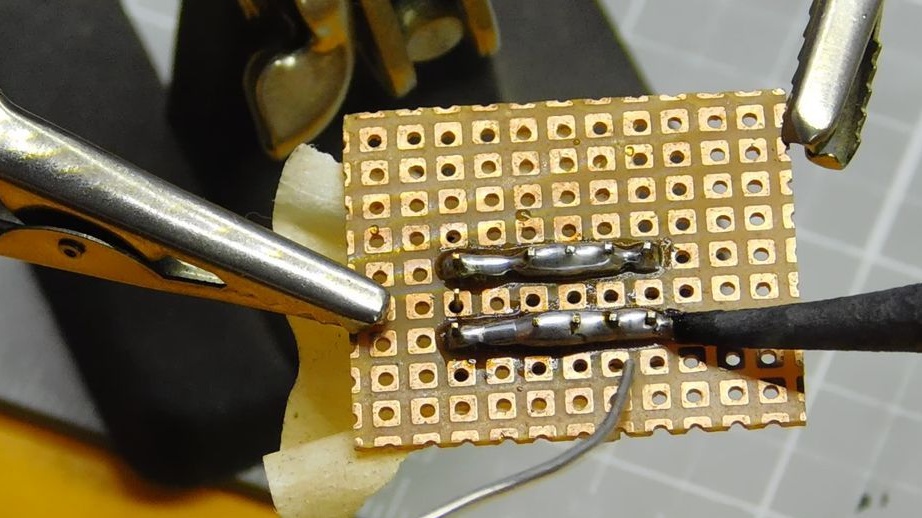
For en vannpumpe og motorer er det nødvendig med 12 V kraft. Men siden Arduino bare gir ut 5 V, samler masteren kretsen på TIP122-transistoren.Veiviseren legger også til flere + 5V og Gnd-pinner til kretskortet.
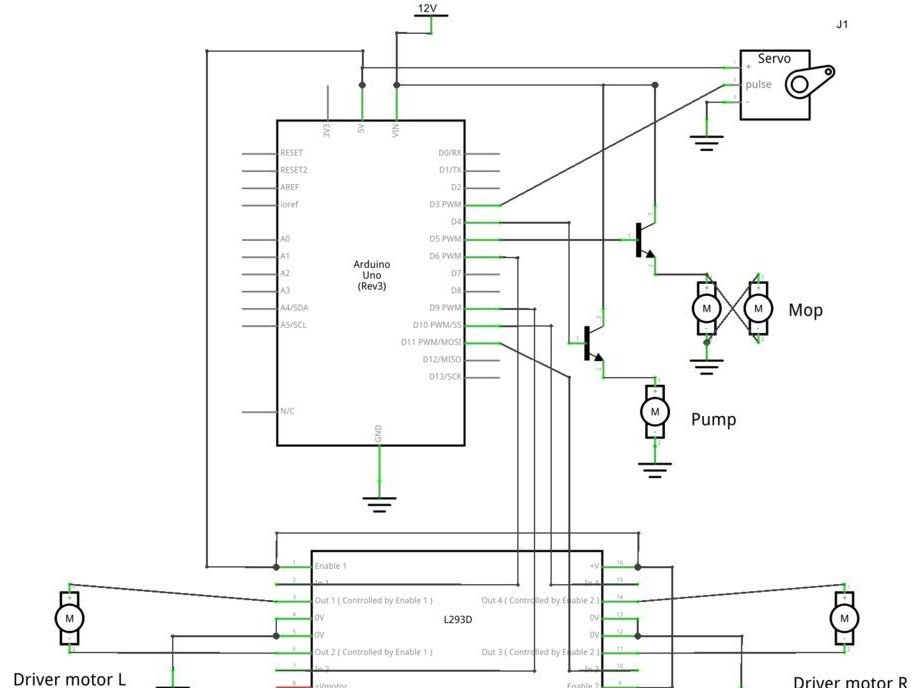
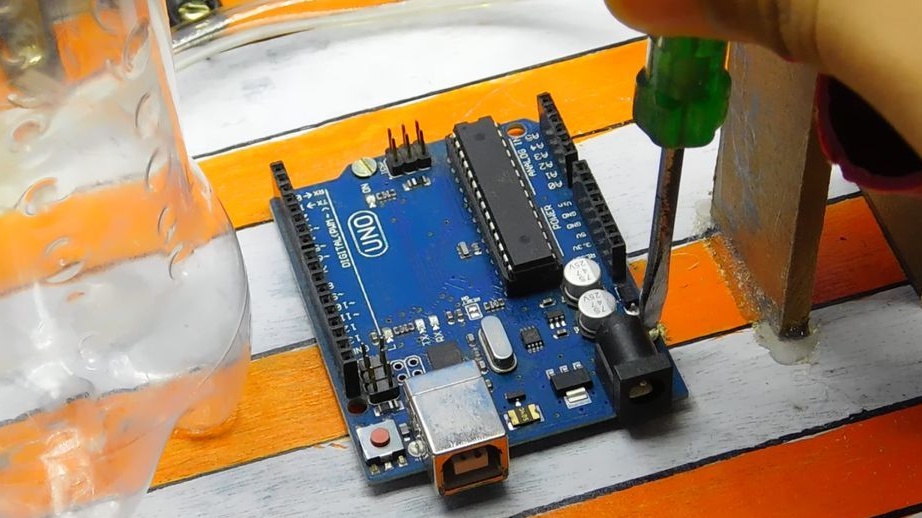
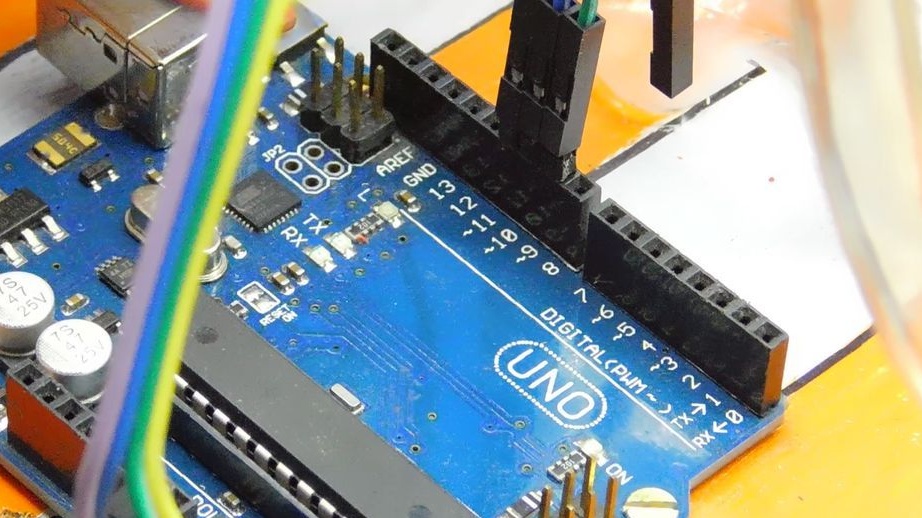
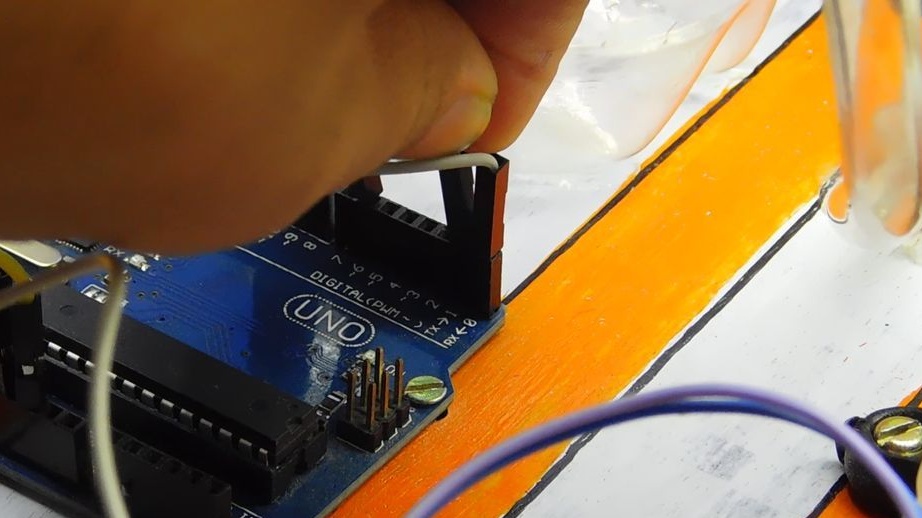
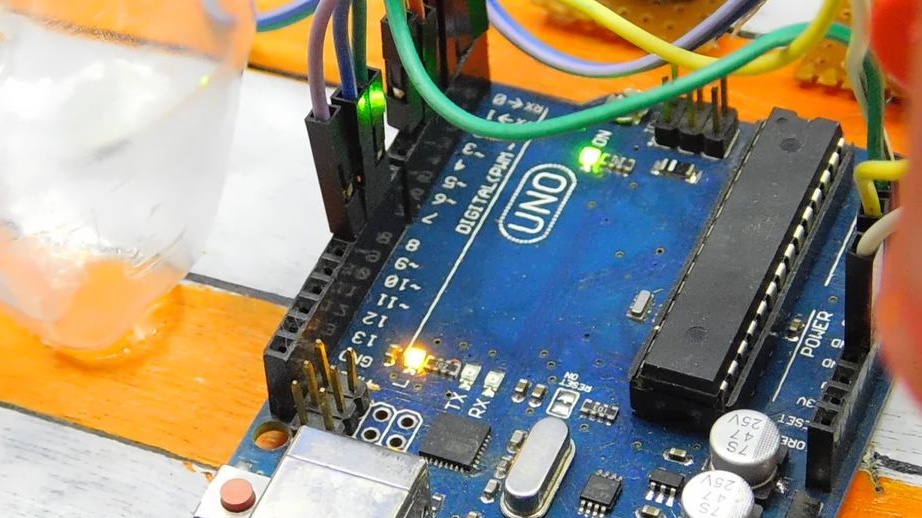
Trinn fem: Installere Arduino Circuit
Fest Arduino til plattformen og kobler elektriske enheter til brettet.
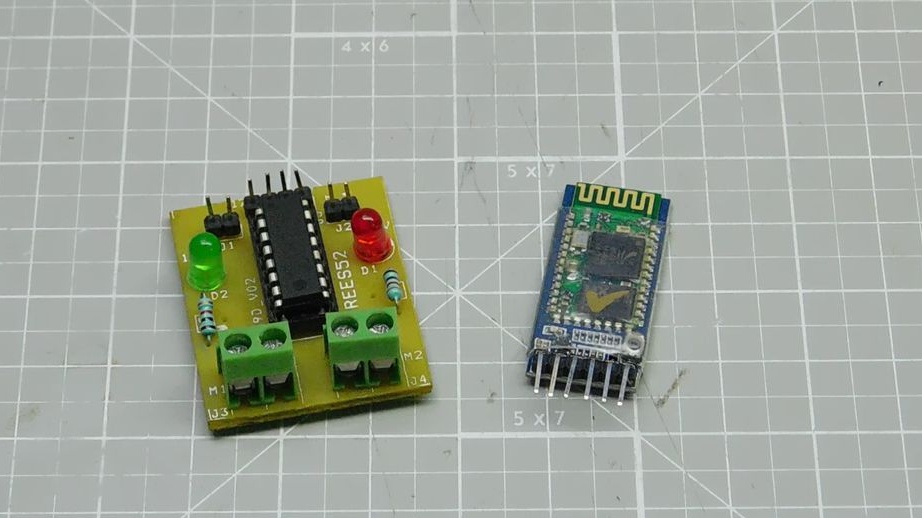
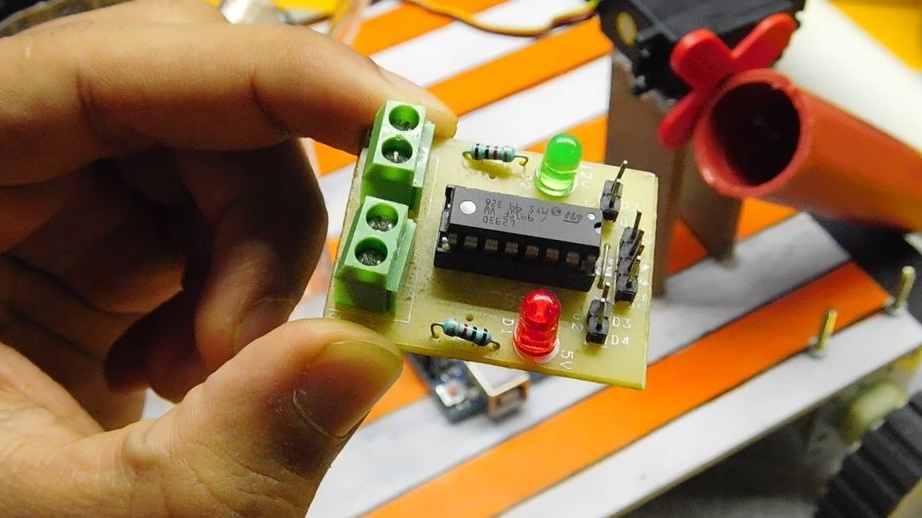
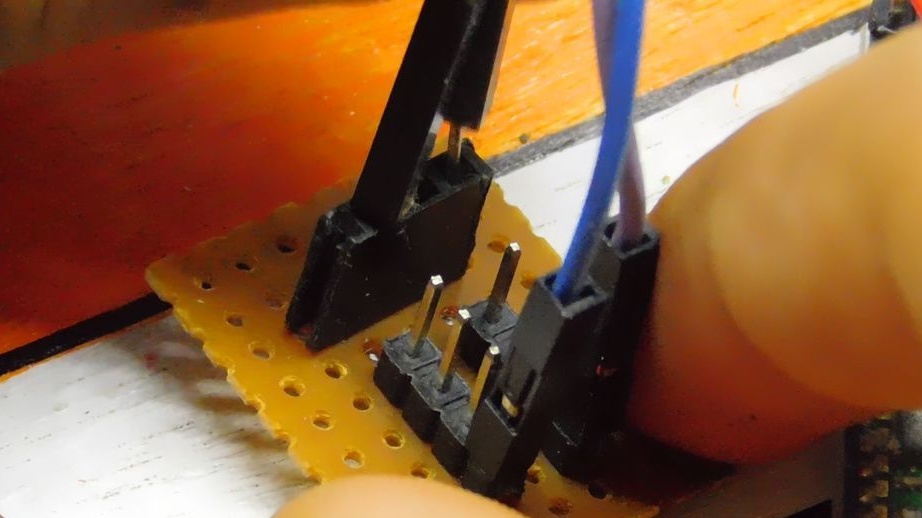
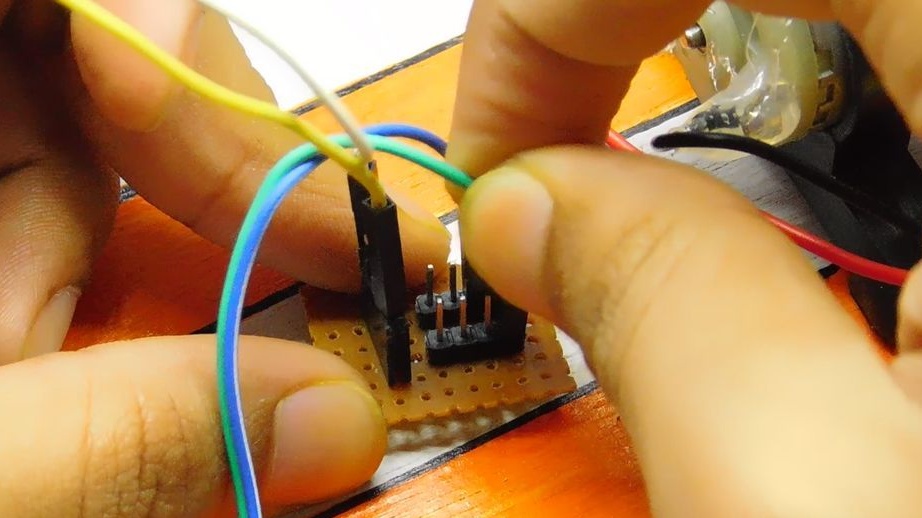
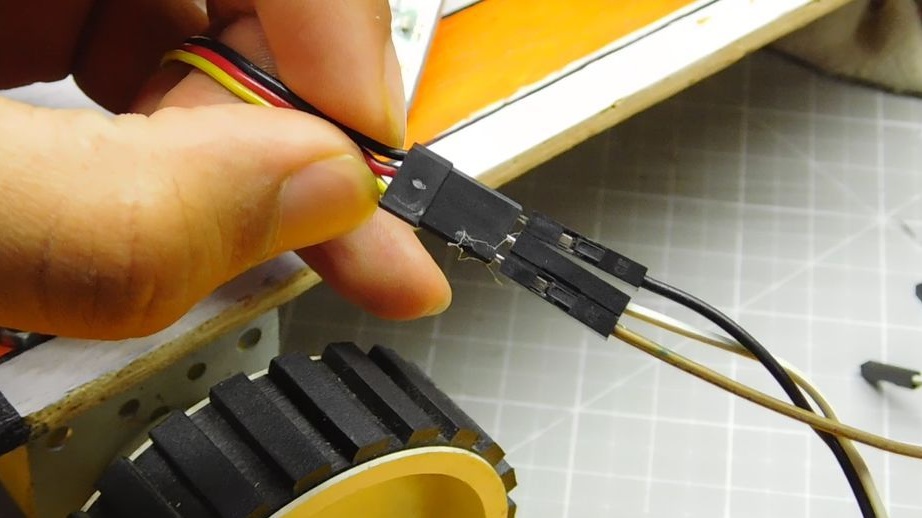
Motorkontrollmodul.
Det selges til motorene (som hjulene er festet til å bevege seg, ikke børstene). Fest ledningene i modulene. Deretter kobler du modulen til Arduino som følger.
Modul ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Gnd -Gnd
+ 12V-modul kobles til batteriet.
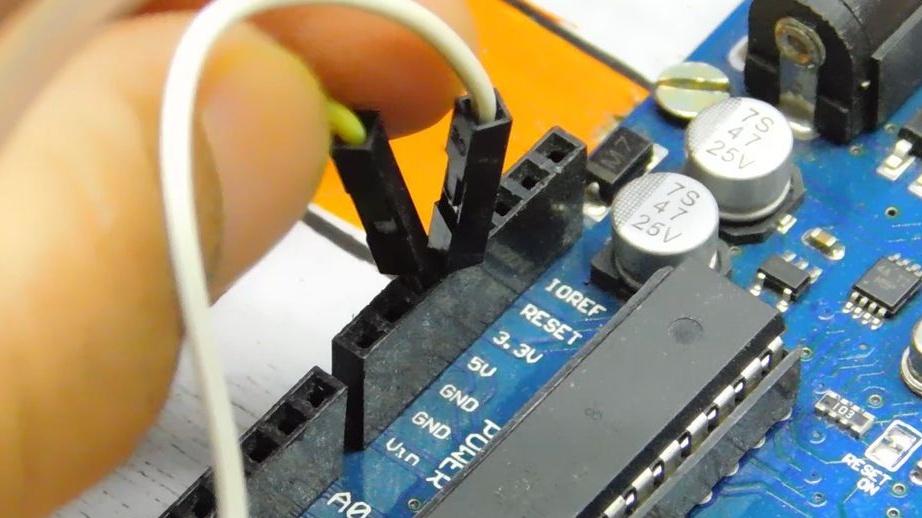
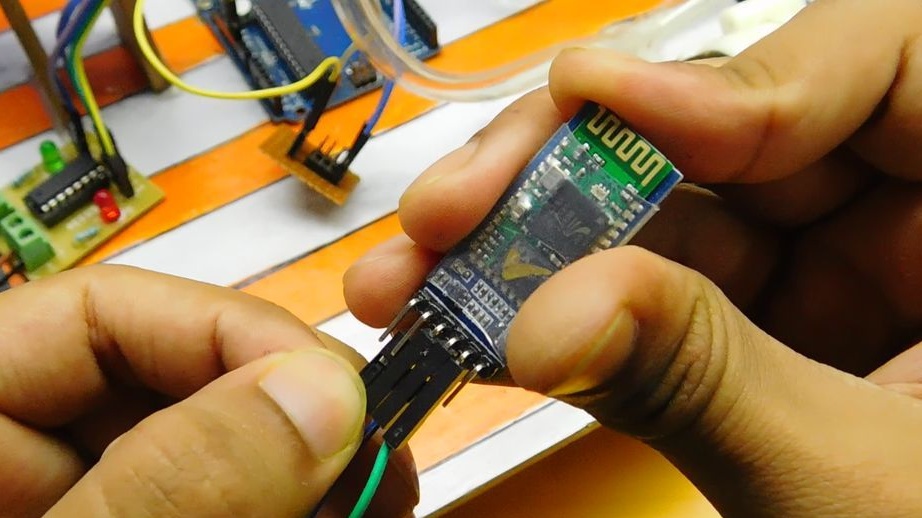
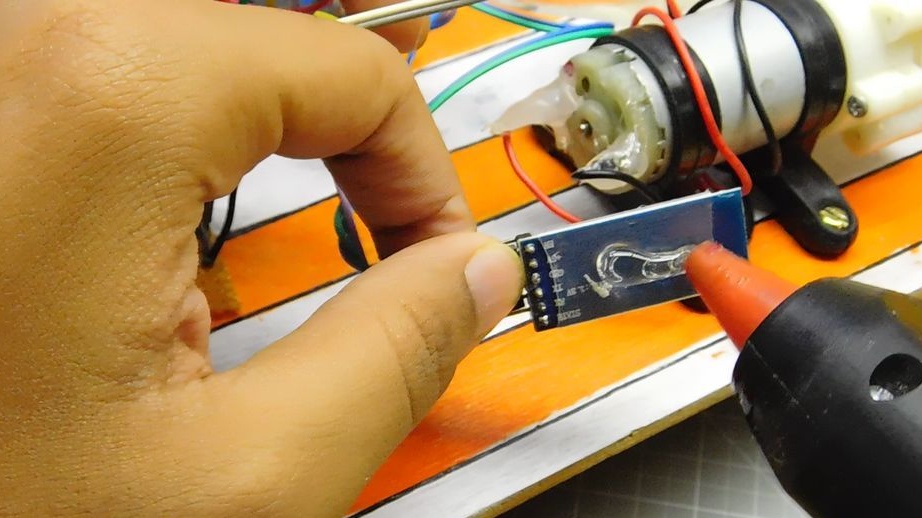
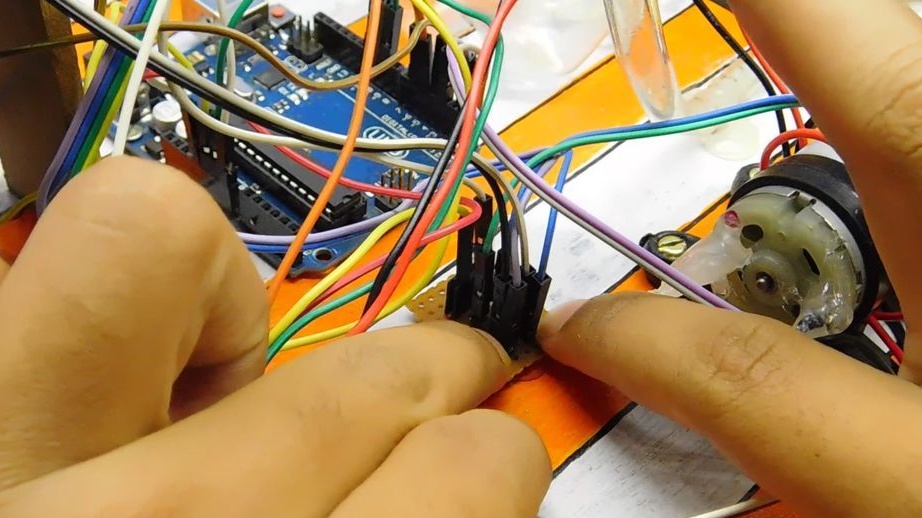
Bluetooth-tilkobling.
Bluetooth ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx - Tx
Tx - Rx
Servomotor ::: Arduino
Vcc - + 5V
Gnd - gnd
Signal - D3
Deretter kobler den pumpe- og børstemotorene i henhold til ordningen. Børstemotorer kobles parallelt og snurrer i forskjellige retninger, høyre med klokken og venstre mot klokken.

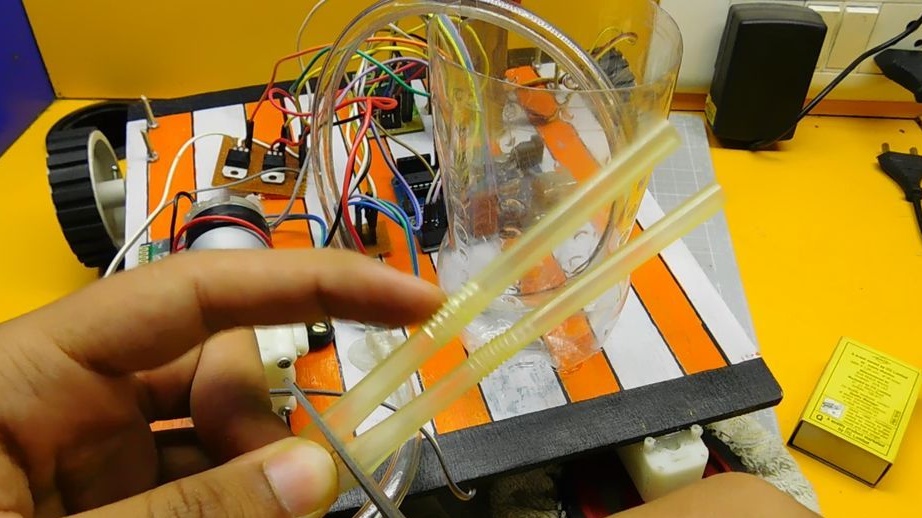
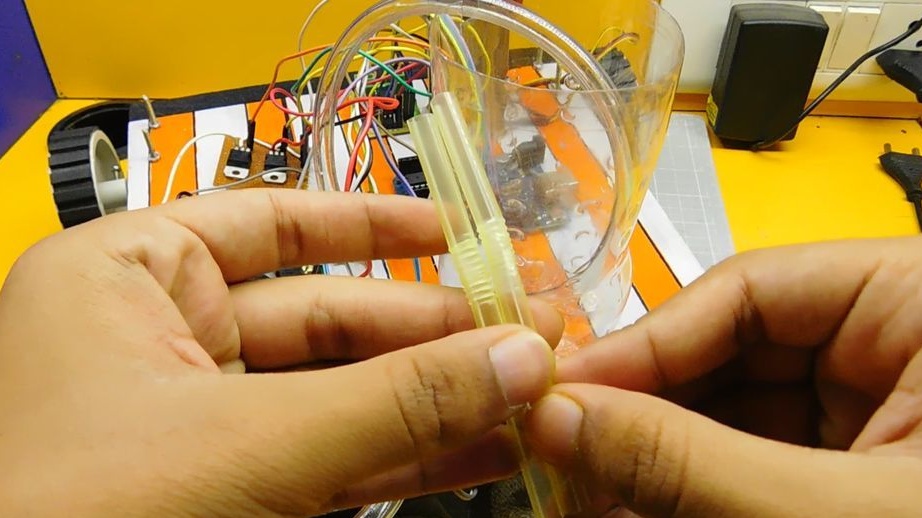
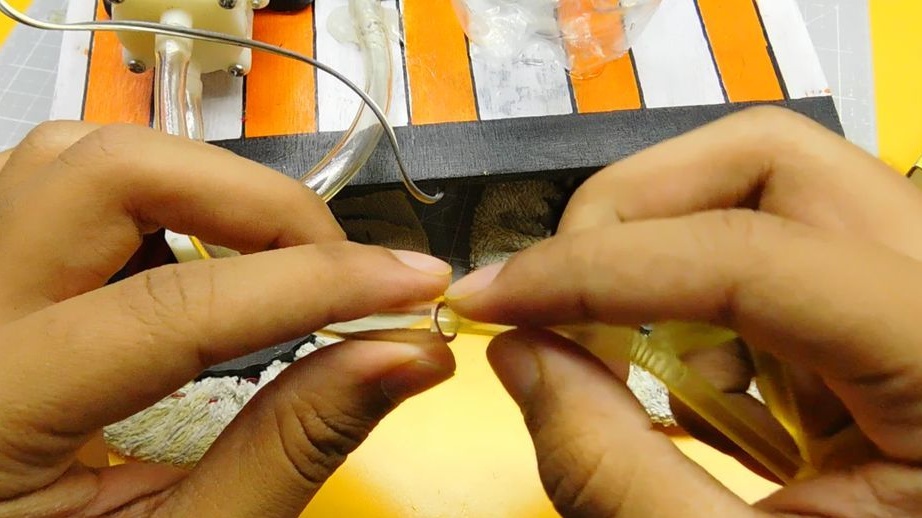
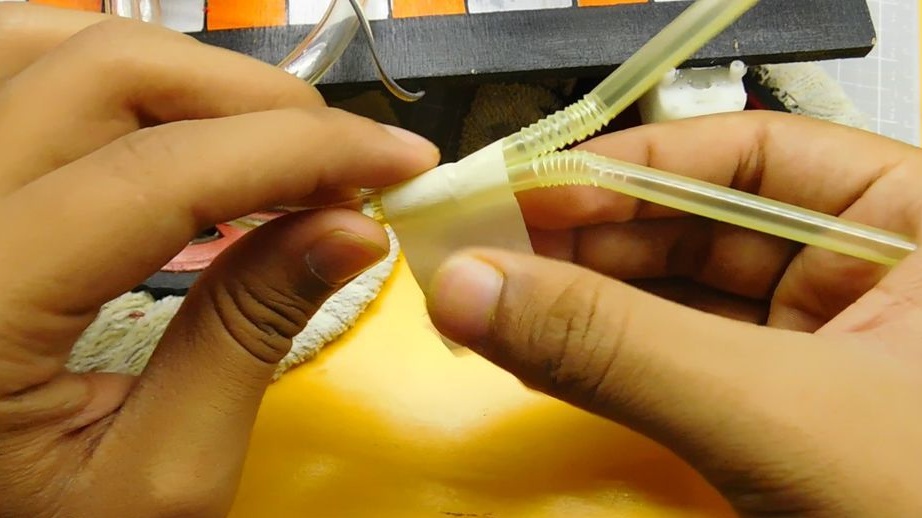
Trinn seks: Festedeler for robotdeler
Skiver to cocktailstrå på omtrent 7 cm hver. Stikk sugerørene i vannforsyningsrøret. Fest sugerør foran børster.




Låser på plattformen elektronisk komponenter.

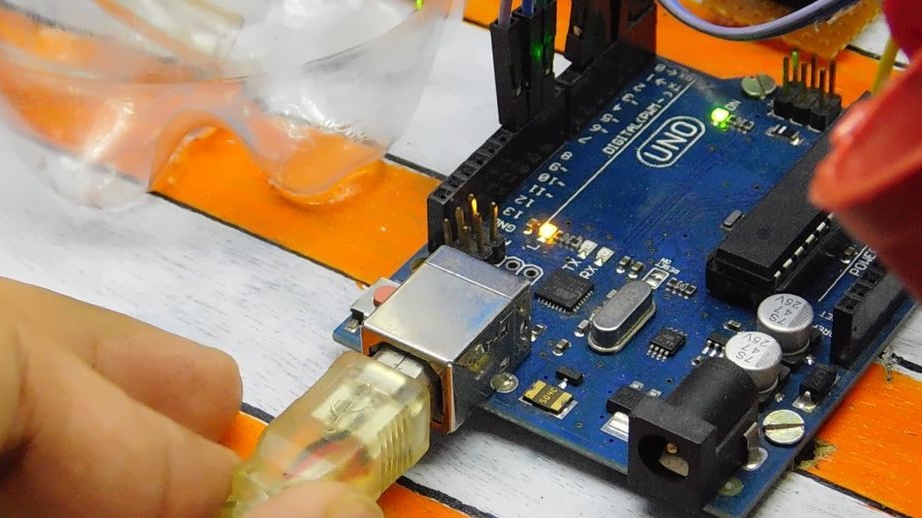
Trinn syv: last ned koden
Fjerner Rx- og Tx-hopperne fra Arduino-brettet. Kobler brettet til en datamaskin. Laster koden. Setter hoppere på plass. .
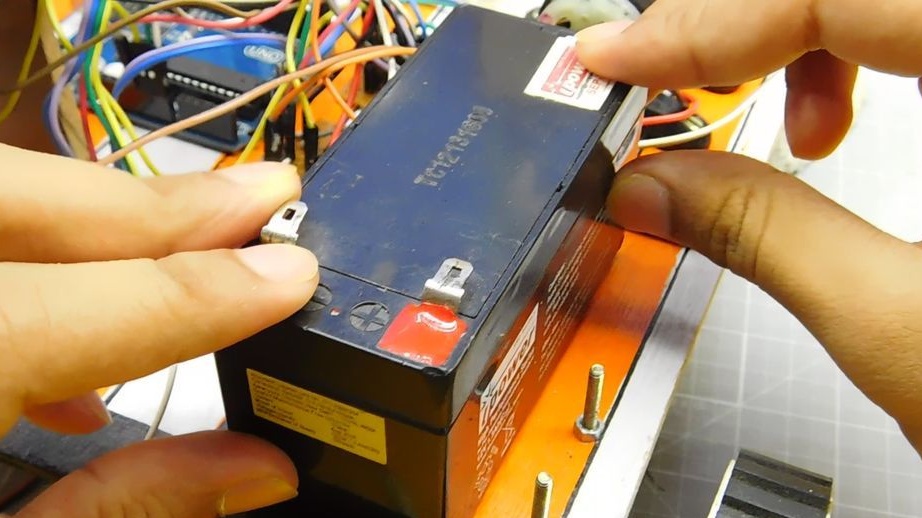
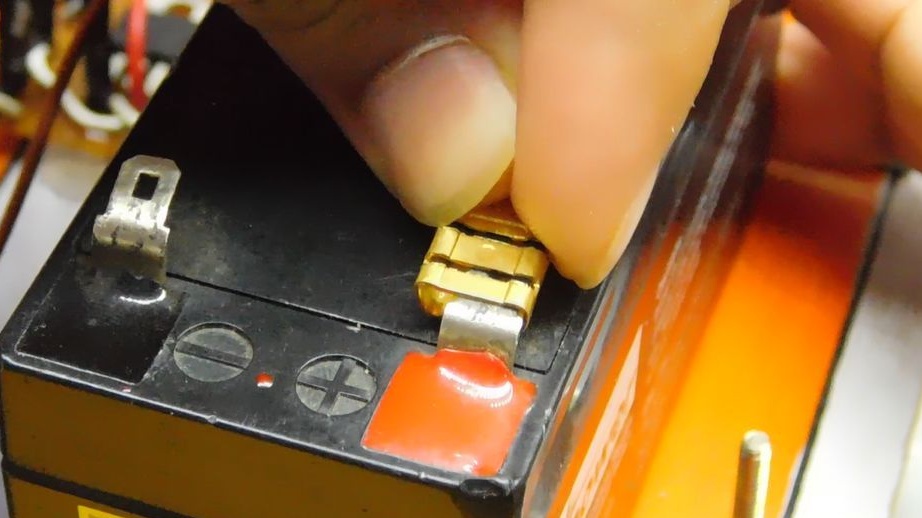
Trinn åtte: Batteri
Sikrer batteriet på plattformen ved å bruke tosidig tape. Kobler elektroniske enheter til batteriet. Arduino master råder til å koble seg gjennom en spenningsdelere. Du kan også legge til en bryter til kretsen.

Trinn ni: kontroller roboten
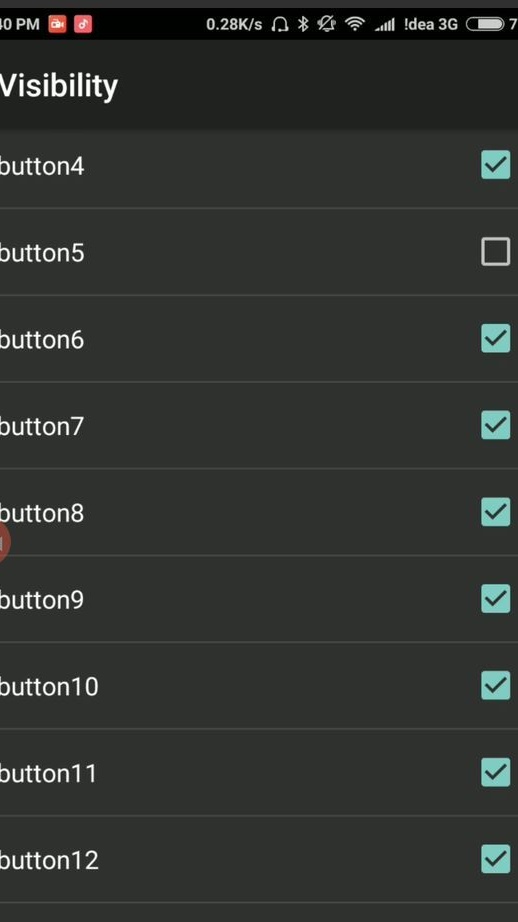
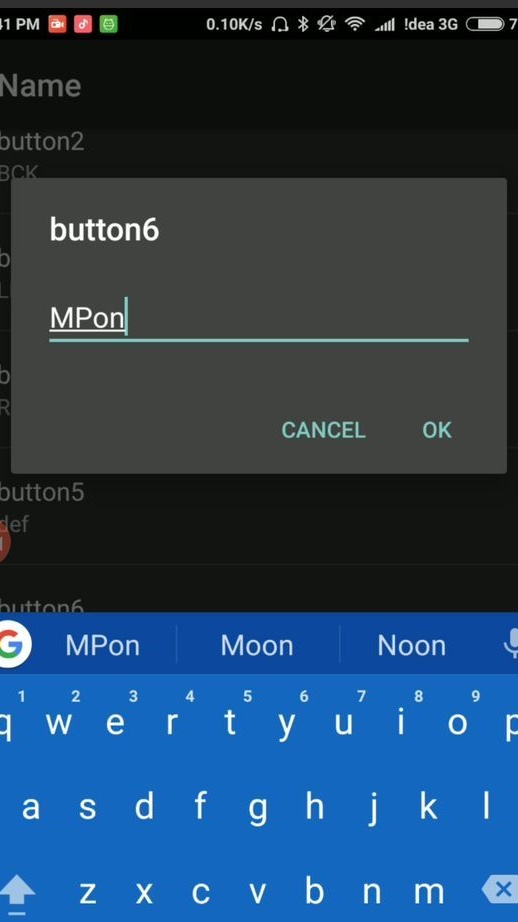
Fra Google Play laster ned veiviseren applikasjonen 'Bluetooth Serial Controller'. Åpner søknaden. Går til innstillinger> synlighet. Deaktiver knapper 5, 9, 12. Går til navn. Tilordner en knapp på 2-3 bokstaver til hver knapp. Se bilde nedenfor.
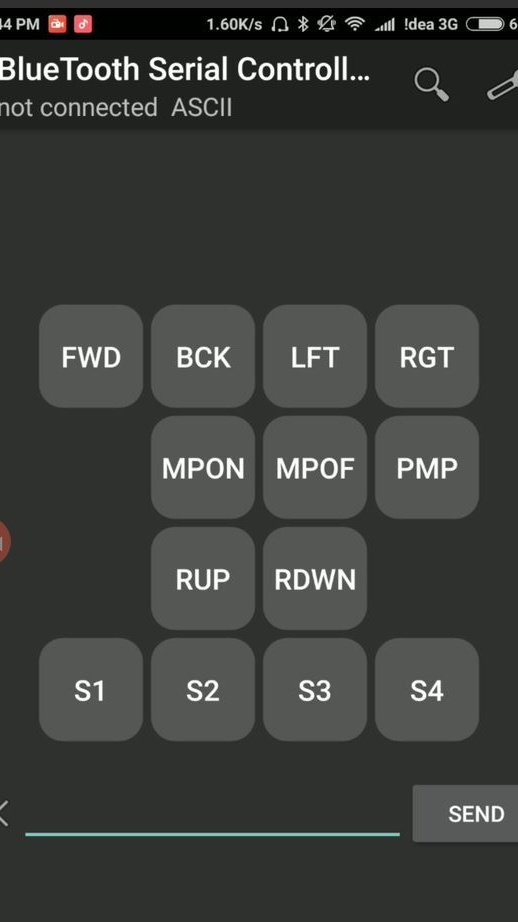
Deretter installerer hver knapp en kommando (sitater må fjernes, sak ikke endres):
Knapp 1 (FWD): 'F'
Knapp 2 (BCK): 'B'
Knapp 3 (LFT): 'L'
Knapp 4 (RGT): 'R'
Knapp 6 (MPON): 'M'
Knapp 7 (MPOF): 'm'
Knapp 8 (PMP): 'P'
Knapp 10 (RUP): 'U'
Knapp 11 (RDWN): 'u'
Knapp 13 (S1): '1'
Knapp 14 (S2): '2'
Knapp 15 (S3): '3'
Knapp 16 (S4): '4'
I stoppkommandoer> kommandoer tilordner du kommandoer bare til disse knappene:
Knapp 1: 'S'
Knapp 2: 'S'
Knapp 3: 'S'
Knapp 4: 'S'
Knapp 8: 'p'

Nå gjenstår det å koble til Bluetooth-modulen ("HC-05"), angi passordet (1234 eller 0000) og du kan prøve å rense rommet -)))
Takk til master-master, og vi ønsker at han forbedrer roboten og får fullstendig autonomt arbeid fra den.
Hele monteringsprosessen til robotrenseren kan sees i videoen.