


I denne artikkelen vil trollmannen vise oss hvordan han laget det fungerende Lego 60193 Arctic Air Transport-helikopteret modellen quadrocopter. Hovedoppgaven i produksjonen av quadrocopter, i tillegg til flyekvaliteter, var å redde så mange originale deler som mulig.
La oss se en kort video som demonstrerer driften av quadrocopter.
Så, for fremstilling av et slikt quadrocopter, brukte mesteren følgende
Verktøy og materialer:
-LEGO City Arctic Helicopter - 60193:
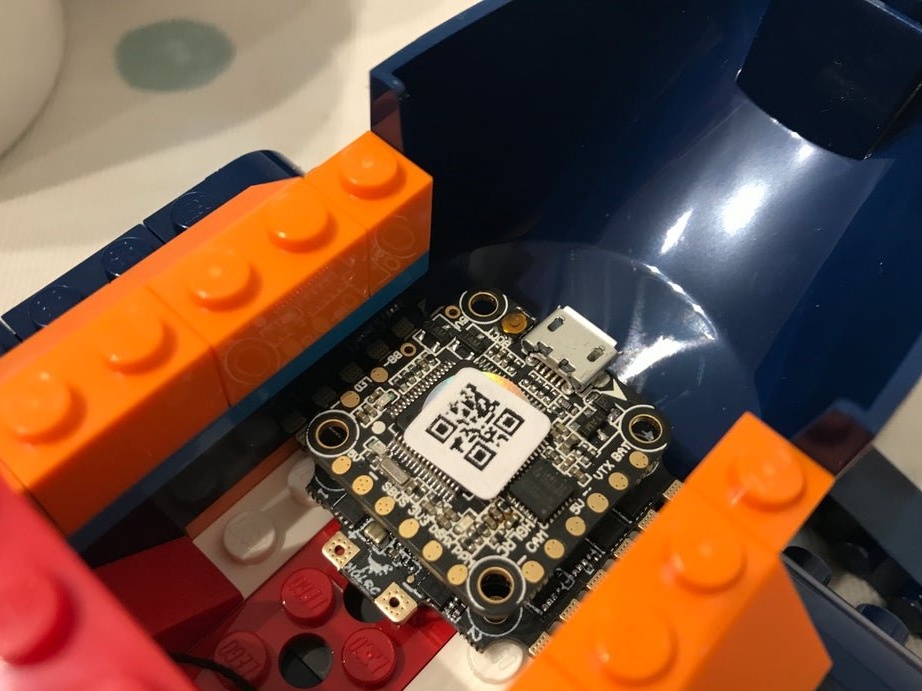
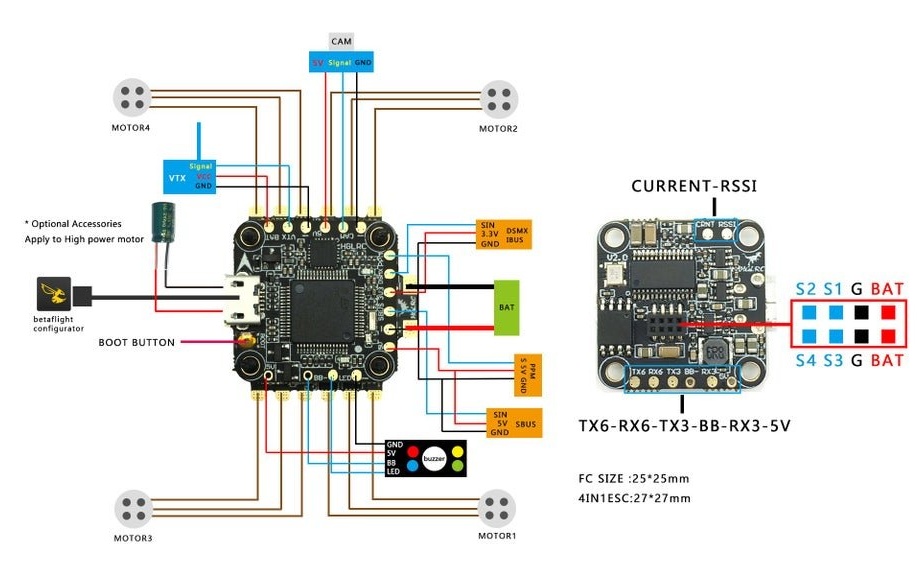
- Kontroller og ESC 20x20 mm, for eksempel HGLRC XJB F428 Micro F4 AIO OSD;
- Børsteløse motorer - 4 stk;
-Propellery;
-Batteri 950 mAh;
-Razemy;
seeing-;
-Radio-modul (sender og mottaker);
-Krepezh;
-Nozh;
Loddejern;
Limpistol;
- skrutrekker;
-Drel;
Trinn en: Lego Build
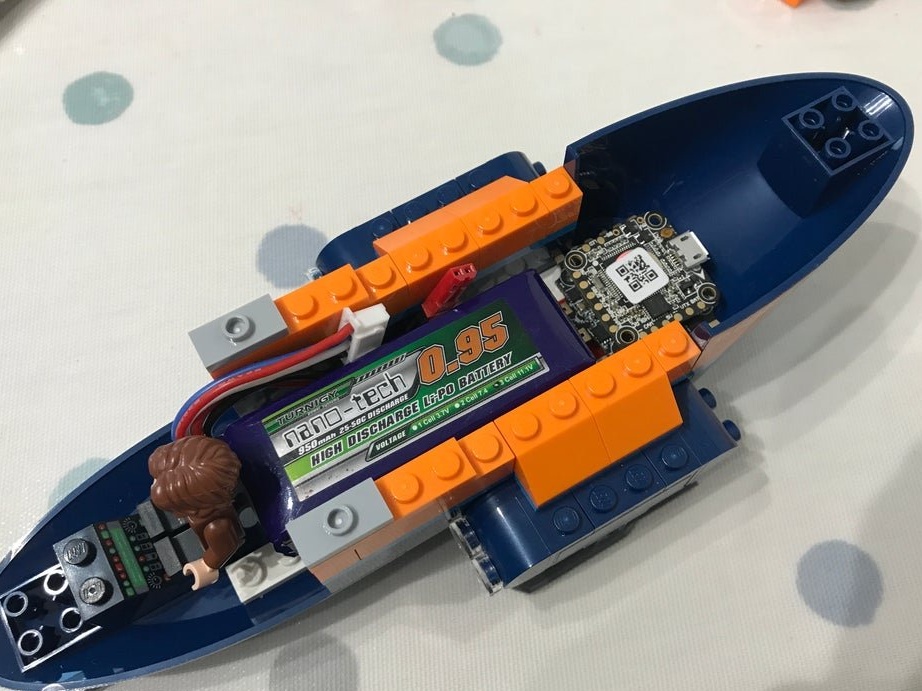
Først samler mesteren LEGO-Arctic. Da er modellen delvis demontert. På innsiden må du plassere batteriet og kontrolleren, og observere balansering av modellen.


Trinn to: Motormontering
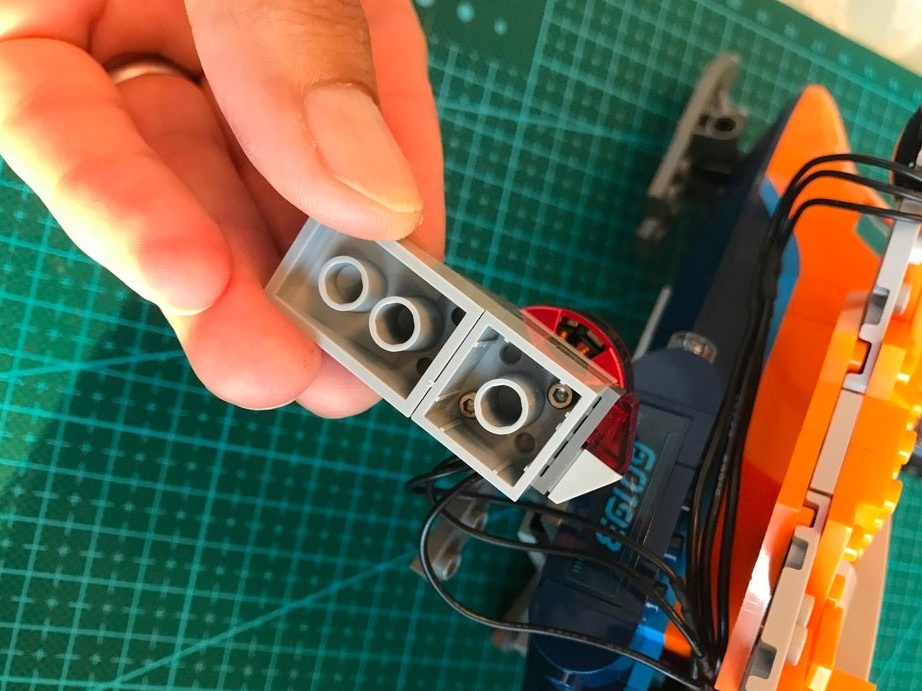
Monteringshullene for den standard 1806 børsteløse motoren er stort sett de samme som piggene på standard LEGO 2x2-plate. Hver “motor” -montering på et quadrocopter har en 2x2 mørkegrå fliser (LEGO 3022) og en 2x2 lysegrå flis med en vertikal stift (LEGO 2460), som vanligvis holdes på navene til en LEGO-propell på toppen.
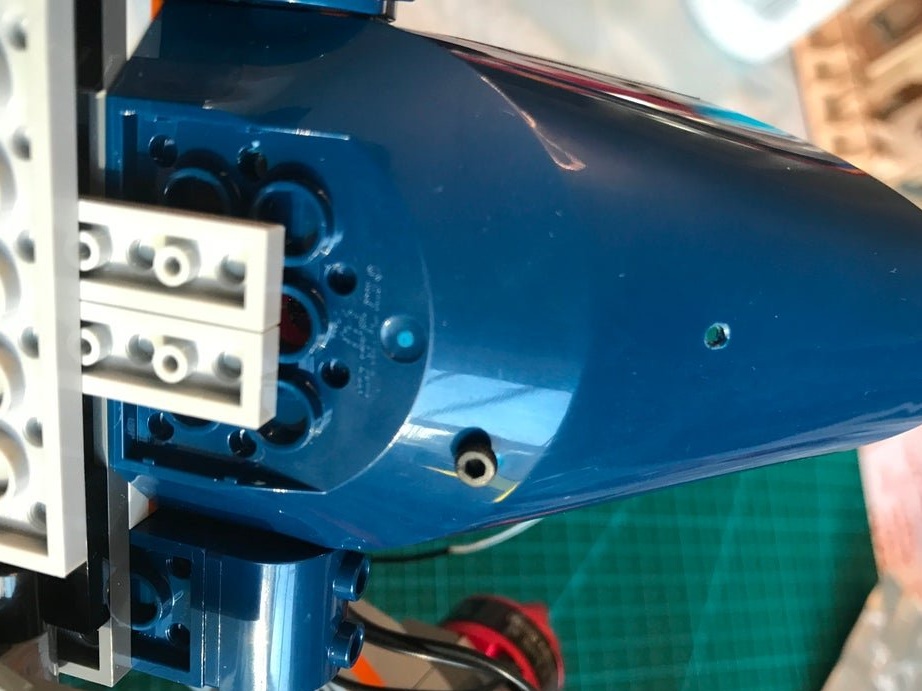
Skipsføreren borer monteringshullene. På motorer, i sentrum, er det lavvann. Et hull under den blir boret i midten av flisen. Sikrer motorer.








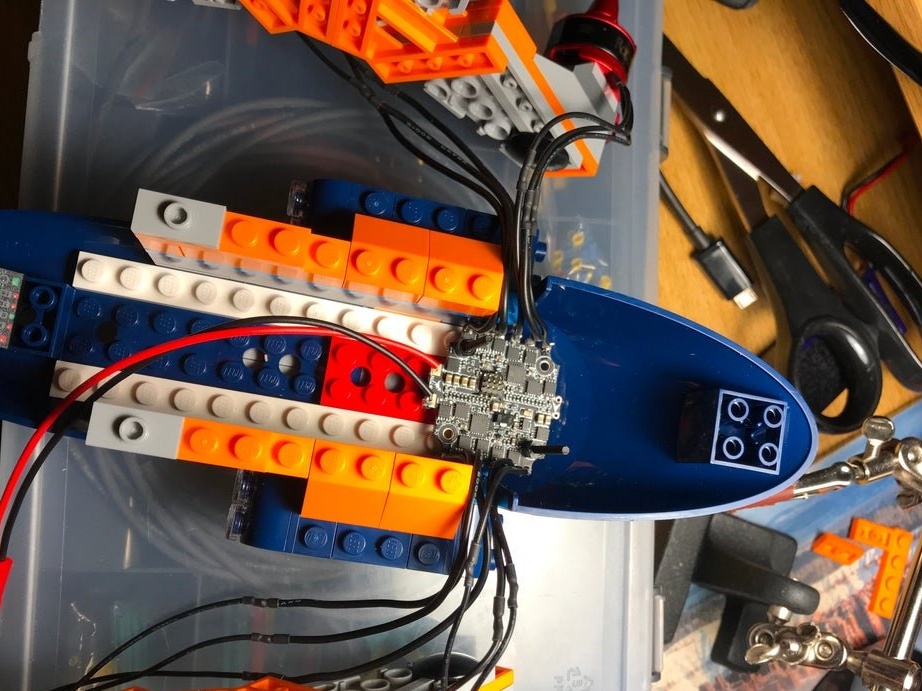
Trinn tre: Skuldre
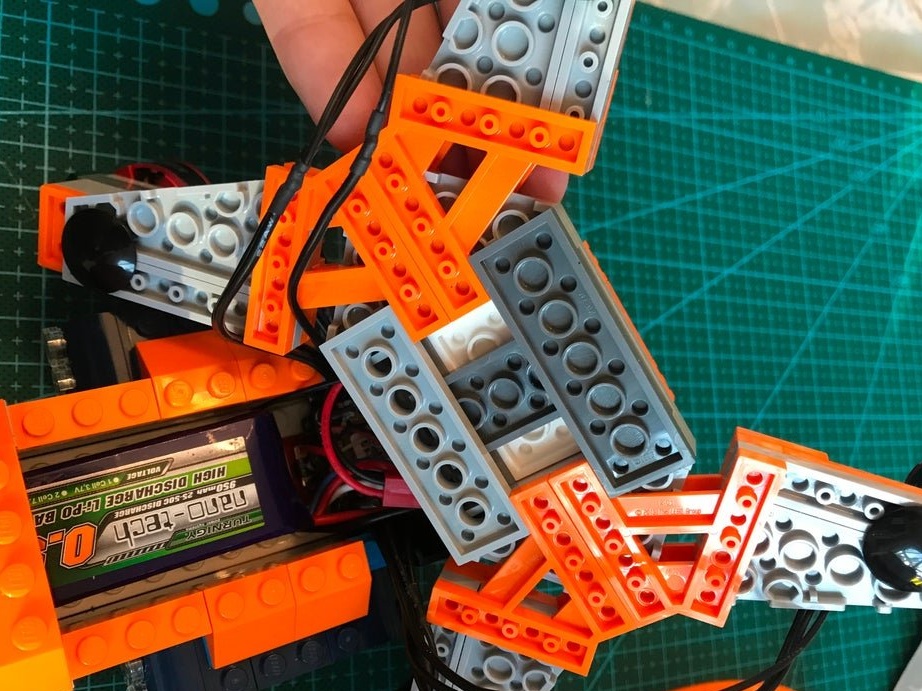
Når du arrangerer “skuldrene” på quadrocopter, kan du endre oppsettet litt for å gi et bredere eller smalere arrangement av motorene og plasseringen av skruene i forhold til hverandre.
Standard LEGO-forsamlingen (første foto) har “skuldre” og motorer som ligger bredt (horisontalt) med en ganske stor skrueoverlapping. Skipsføreren gjenskaper "skuldrene" og kaster motoren og følgelig skruene.



Trinn fire: elektronikk
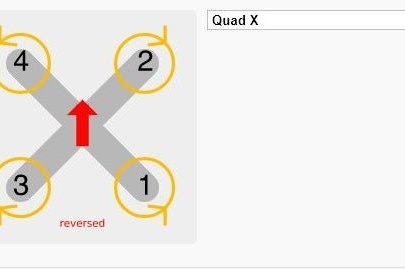
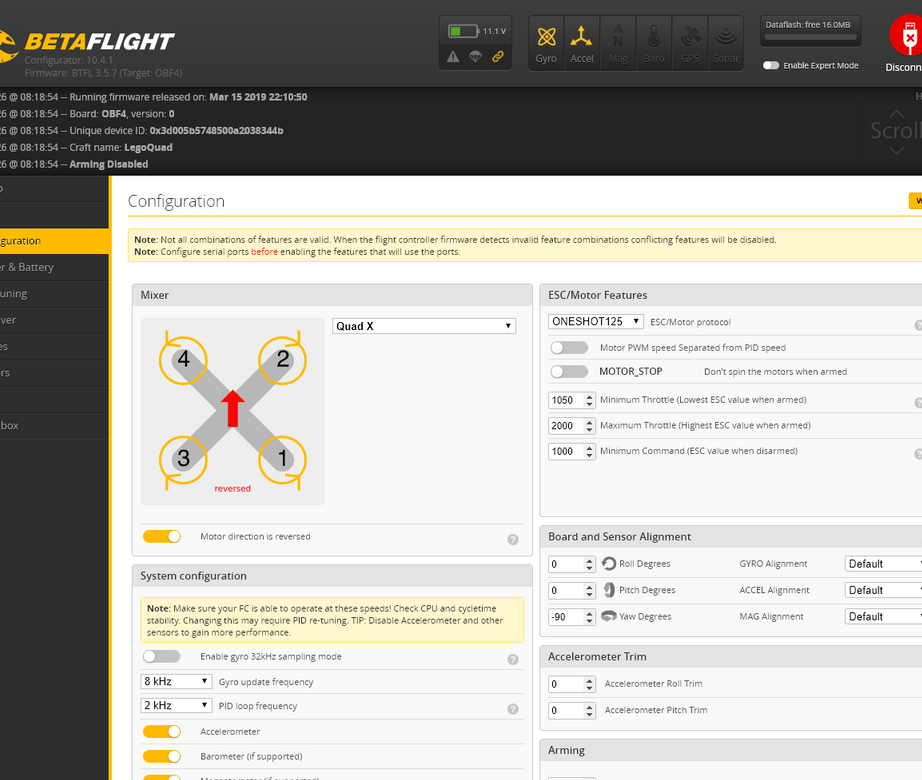
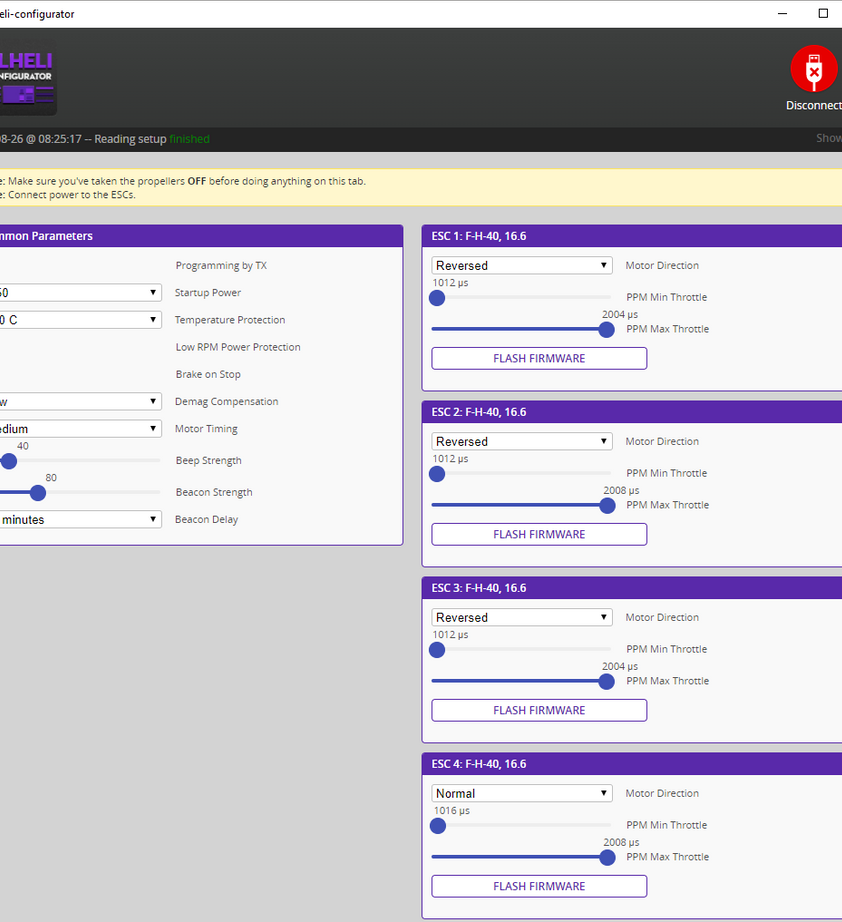
I henhold til ordningen installerer den elektronikk. Det første bildet viser et diagram over motorenes rotasjonsretning. Rotasjonsretningen kan også endres i programmeringsstadiet.

Etter at installasjonen er fullført, og før du kobler til batteriet, sjekker veiviseren tilkoblingene for å forhindre brudd eller kortslutning.
Når du slår på strømmen, skal du se lysene på flykontrollen og noen få pip fra ESC.
Trinn fem: Oppsett
Nå som alt er koblet til, er det på tide å konfigurere kontrolleren.Dette betyr å laste ned programvare (firmware) som utfører oppgaven med å avkode styresignalene fra RC-senderen, behandle sensorinngangssignalet (akselerator, gyroskop) og gi styresignaler for ESC for å rotere motorene med en gitt hastighet.
Fjern propellene for sikkerhet! Et batteri er ikke nødvendig for de første installasjonstrinnene, bare USB-strøm.
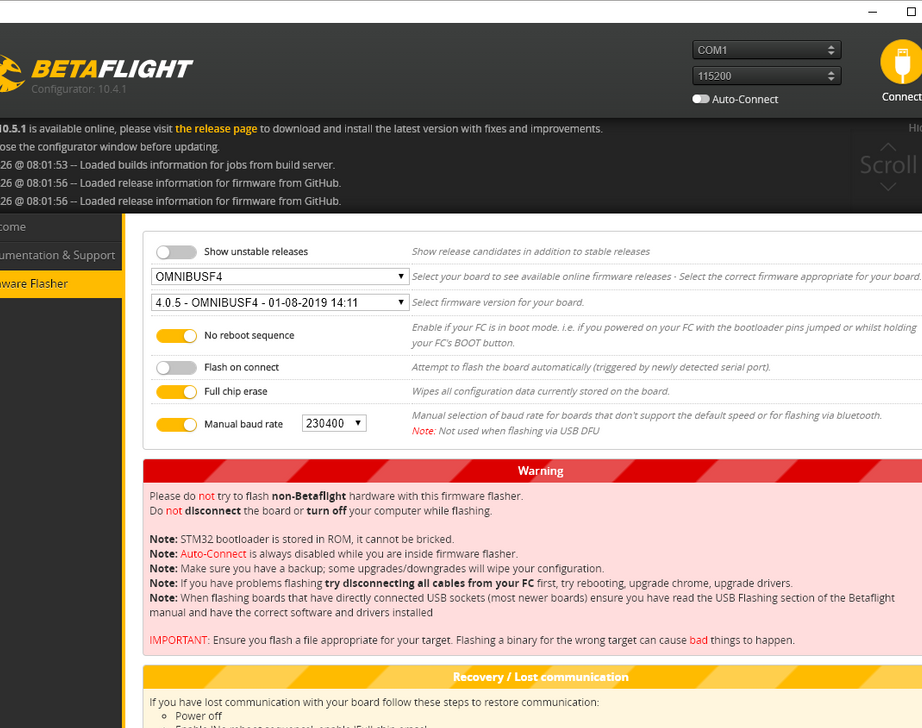
Last ned Beta Configurator
Koble mikro-USB-kabelen til flykontrollen. Vær oppmerksom på at dette kan være enklere å gjøre hvis kontrolleren ikke er skrudd fast i chassiset.
Last ned og last opp riktig firmware for flykontrollen.
betaflight-settings-legoquad.txt
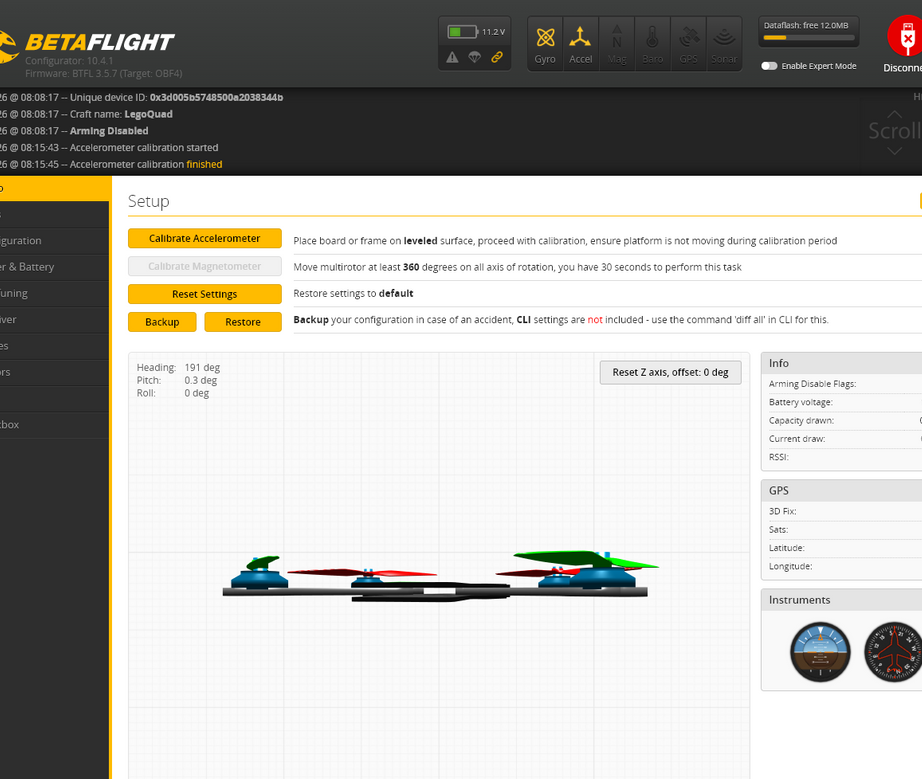
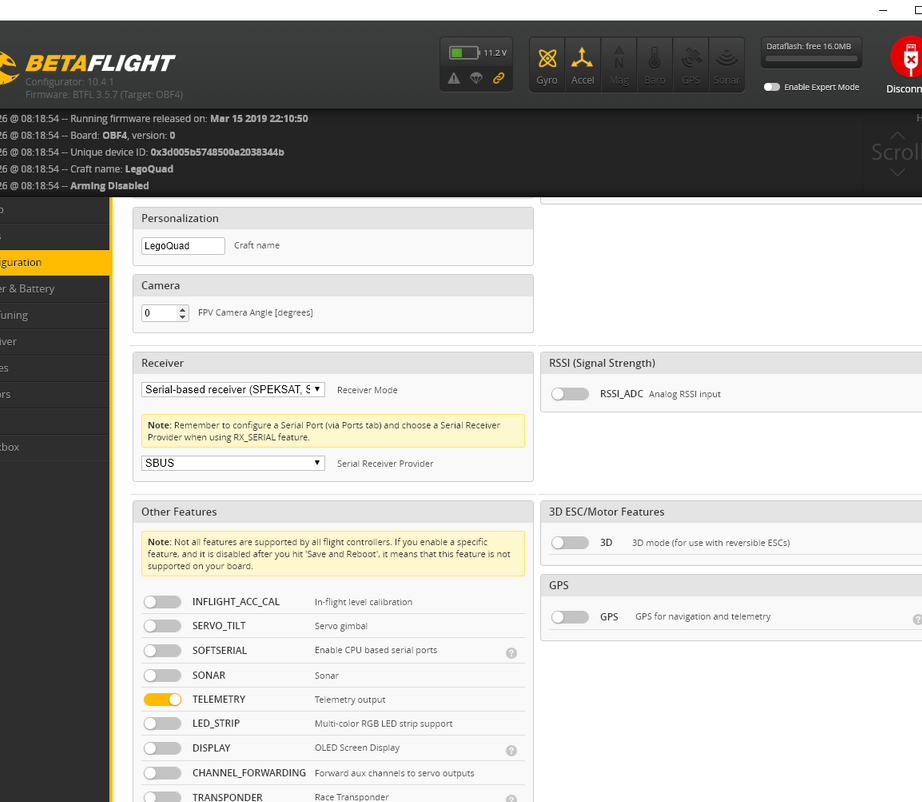
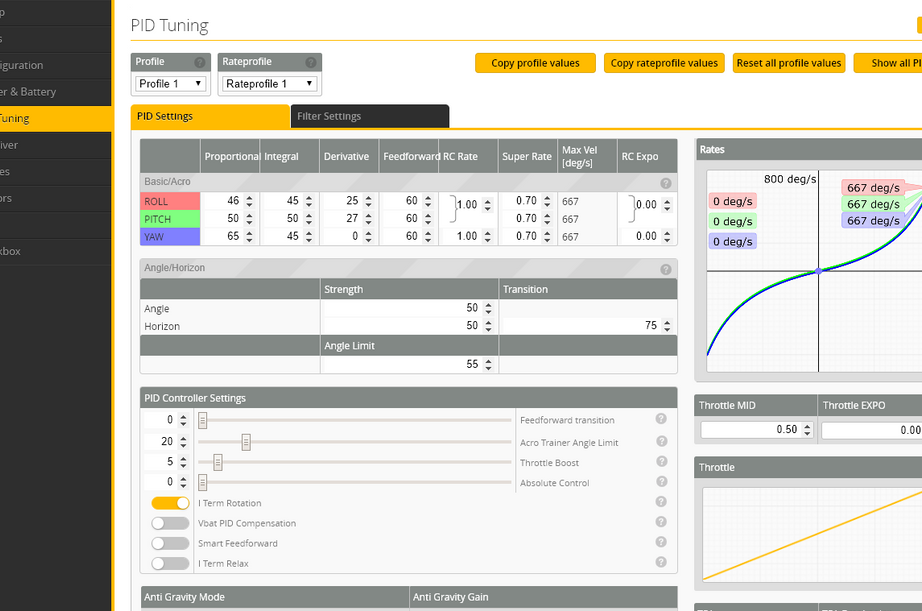
Klikk på "Connect" -knappen og konfigurer følgende innstillinger:
1. Oppsett - modellkalibrering av motorer
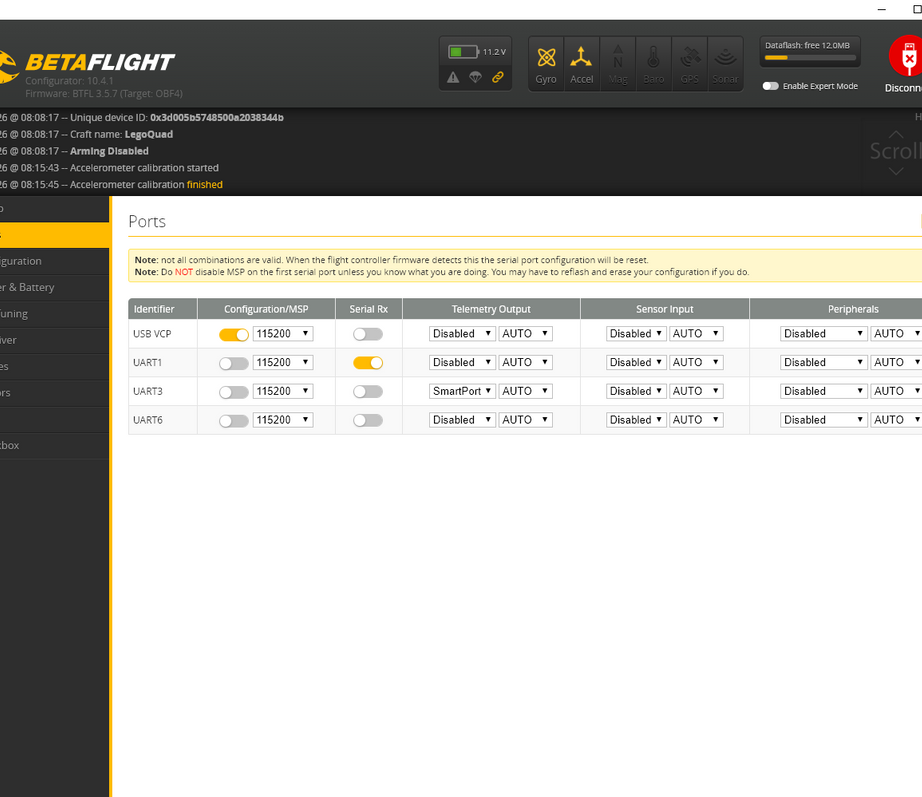
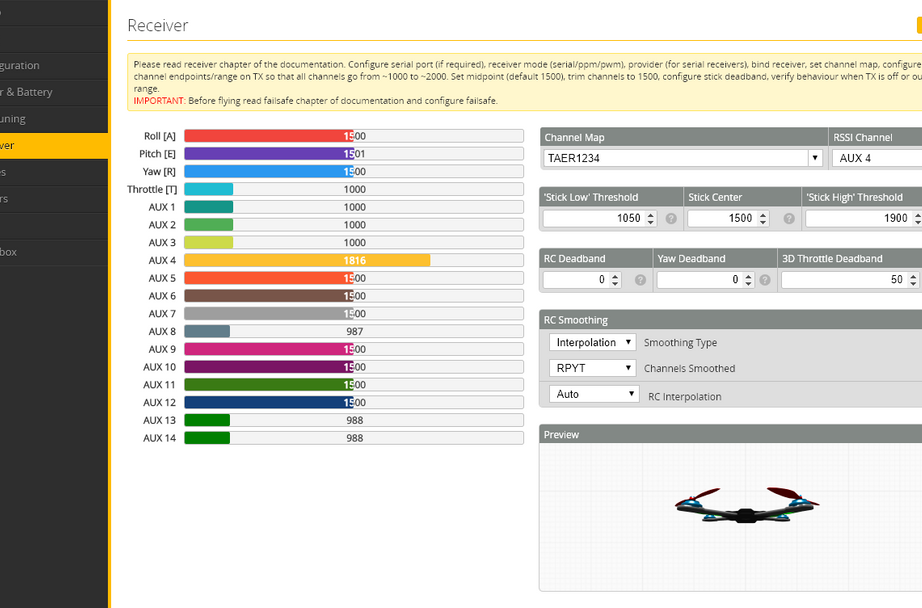
2. Spesifiser portene - UART1 - Seriell RX for tilkobling av SBUS RC-mottaker
3. Lagre og starte på nytt
4. Opprett en forbindelse mellom mottakeren og senderen
5. Overbelastning
6. Verdien for PID-masteren er satt til 250
7 Koble til batteriet
8. Juster spenningen.
9. Forsikre deg om at kanaldisplayet og kontrollretningen er riktig, når alt er satt opp, skal quadcopter-modellbildet i nedre høyre hjørne bevege seg i alle riktige retninger når du flytter joysticken på RC-kontrolleren.
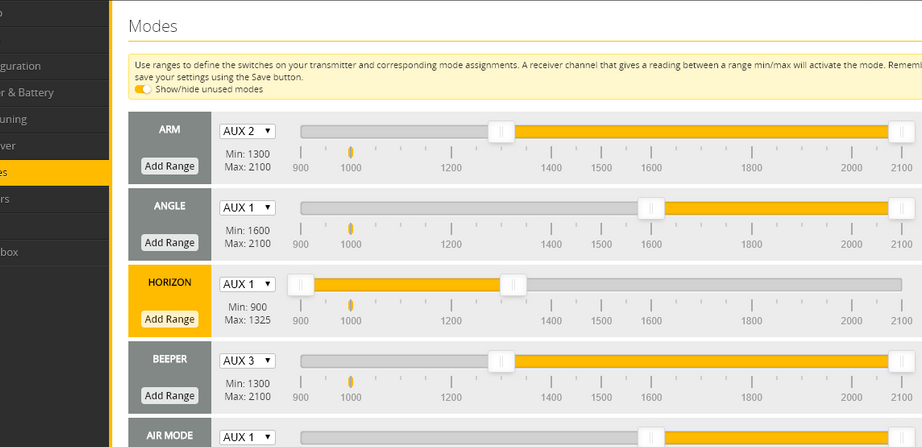
Konfigurerer modusene.
ARM av / på
HORIZON selvnivellerende / ACRO for tradisjonell FPV-flyging
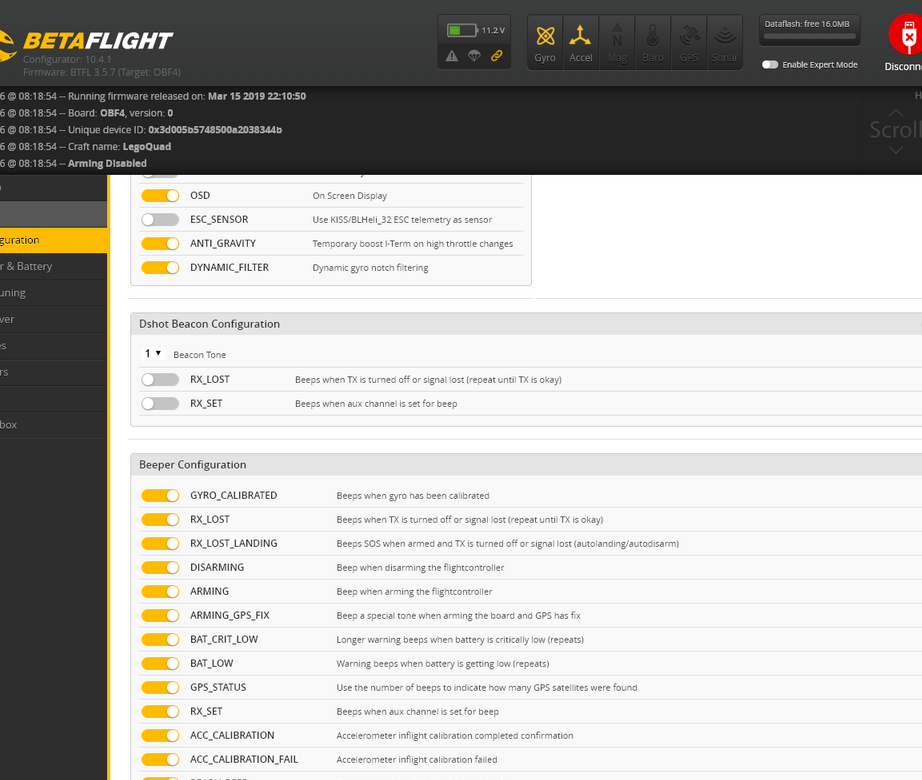
BEEPER - Nyttig hvis du mister modellen i høyt gress eller busker.
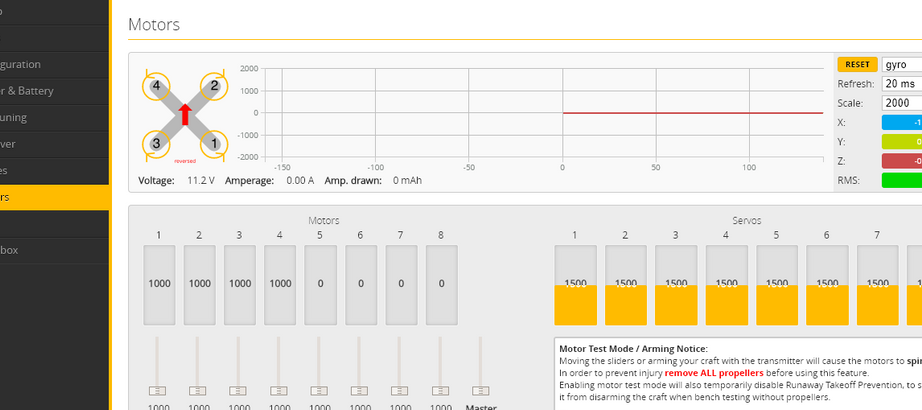
Fanen “Motorer” - bruk dette alternativet til å sjekke hver motor individuelt, og viktigst av alt, merke rotasjonsretningen for hver av dem
Korriger feil rotasjonsretning med BLHELI-konfiguratoren
Etter alle disse trinnene, kan du koble fra USB og batteriet, og deretter slå på strømmen og sjekke at alt fungerer:
Slå på senderen og strømmen
Koble til batteriet og monter quadrocopter på en flat overflate
Slå på ARM-bryteren, og motorene skal begynne å snurre med lav hastighet.
Kontroller gassen mens du øker hastigheten
I horisontal modus kan du prøve å vippe quadrocopter og sørge for at motorene reagerer riktig, for eksempel vippe den fremover og de fremre motorene vil akselerere.

Trinn seks: sluttforsamling
Praktisk talt hele strukturen i saken er holdt med monteringslåser. Skipsføreren bruker kun smeltlim for å montere motorene.


Alt er klart, og du kan teste.



