

slikt roboten er allerede opprettet, og det kalles DIY: LightBot. Dessuten kan hvem som helst samle det, alle elementer for opprettelse kan enkelt bli funnet, og roboten kommer til å være samlet ganske enkelt. Denne typen roboter vil stadig følge eieren i mørket og fremheve den på rett sted, noe som eliminerer behovet for å holde lommelykten i hånden. Roboten vil bli overvåket av eieren takket være en infrarød sensor som er festet til eierens fot.
Materialer og verktøy for å lage en robot:
1. Infrarødt fyr. En slik enhet vil bestå av fire infrarøde LED-er, de kan finnes i fjernkontrollen fra TV-en.
2. To hjul fra et sett med K'nex eller barneleker.
3. To små motorer (finnes i barneleker).
4. To infrarøde transistorer som NPN eller fotoresistor. Infrarøde fototransistorer er ikke vanskelig å kjøpe.
5. Tre AA-batterier og ett 9 Volt.
6. PVC-rør.
7. Smeltlim.
8. Engangs plastgaffel.
Produksjonsprosessen til roboten:
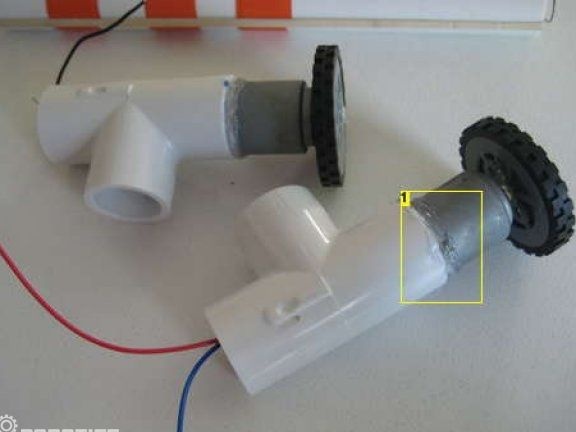
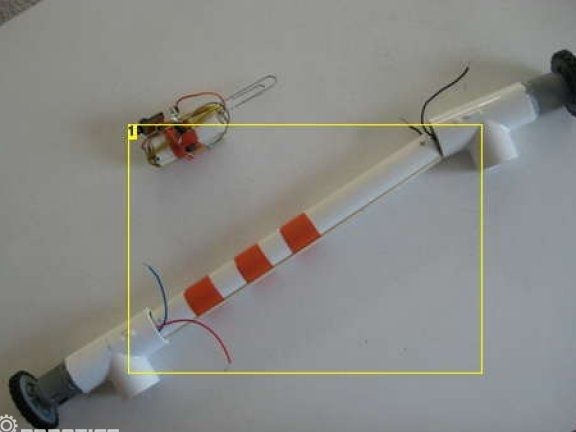
Første trinn. Motorinstallasjon
Først må du installere motorene. For installasjon brukes plast “tees” som deretter settes på hovedrøret. Motorer festes med smeltlim. Det er ikke nødvendig å synes synd på limet her. Også på dette stadiet kan hjul settes på motorenes akse. Slik at de holder fast, kan de også festes med smeltlim.
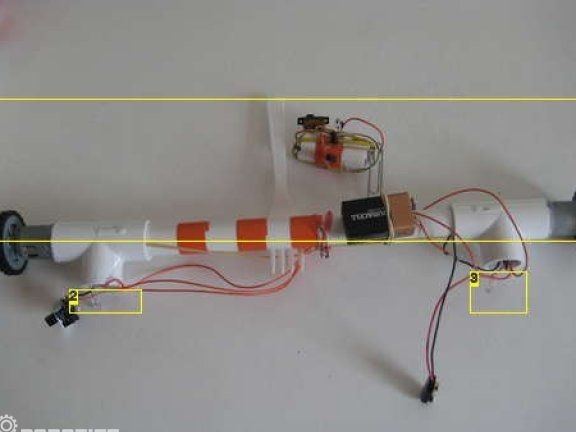
Trinn to Installere fotoresistorer
Fotoresistorer er nødvendig for å spore det infrarøde fyret. De vil være et slags robotøyne. Avhengig av i hvilken retning lyset vil komme ut, vil roboten akselerere en av motorene for å vri i riktig retning.
Lysmotstander er festet til "tees" på stedene som er indikert med nummer 2 og 3. På disse stillingene kan de festes med et trepinne-lim.
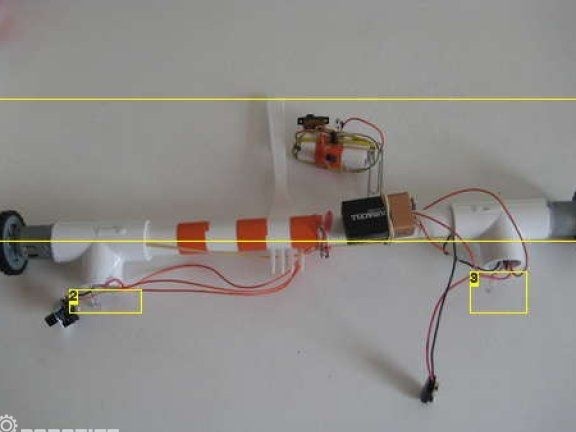
Trinn tre Installasjon av strømforsyning
Totalt kjører roboten på to kraftkilder. Dette er tre AA-batterier og ett 9 Volt-batteri. Når det gjelder fingerbatteriene, er de installert inne i røret.Vel, et “Krona” -type batteri er festet til håndsettet utenfra.
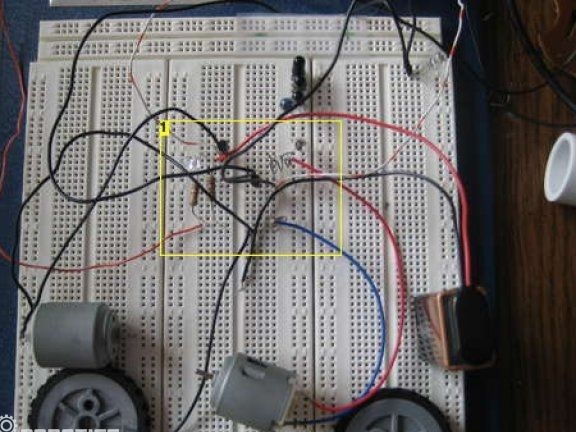
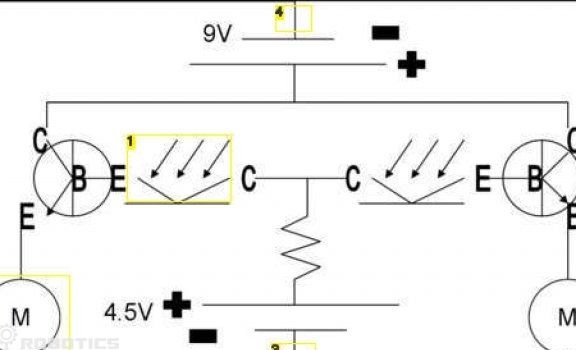
Trinn fire Robotkrets
Opplegget er designet på en slik måte at hvis roboten ser stråling på den ene siden, så akselererer den motoren fra motsatt side, slik at roboten snur seg. Ønsket motorhastighet oppnås ved å erstatte motstander eksperimentelt.
En annen krets kan suppleres med en bryter. Den må installeres på en slik måte at den avbryter strømforsyningen til roboten.
I diagrammet angir tallet 1 en fototransistor, 2 - motorstyringen, 3 - et sted for å installere en bryter, 4 - du kan også sette en bryter her.
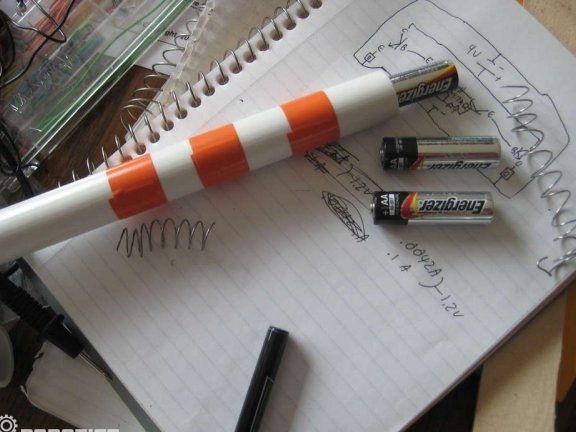
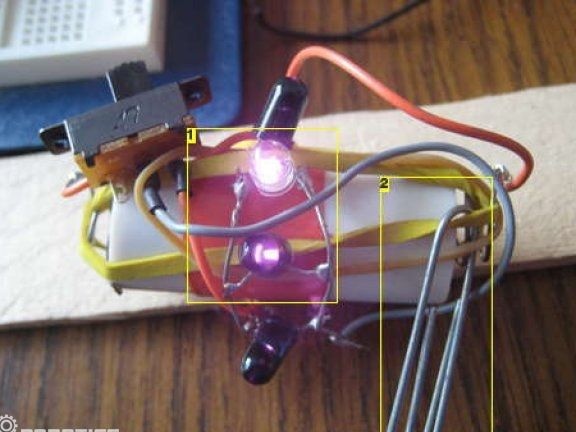
Trinn fem Lag et IR Beacon
For å lage et infrarødt fyr, tas det et kort polyvinylkloridrør der ett AA-batteri er installert. Kontakter holdes takket være et elastisk bånd, og strømforsyningen til de fire infrarøde diodene styres av en bryter. Det er umulig å se slikt lys med øyet, for å sjekke diodenes brukbarhet, må de sees på gjennom et digitalt kamera. Fyrtelefonen er festet med et vanlig binders til beinet.
Trinn seks Det siste stadiet av robotenheten
Nå må alt kobles til som angitt i diagrammet. Den mekaniske delen må også settes sammen, mest oppmerksomhet bør rettes mot fotoresistorene, de må stikke ut, for ellers vil de ikke kunne hente signalet til fyret. Nå, når du slår på roboten, må du gå rundt den og se hva den vil gjøre.
Selvfølgelig kan det hende at roboten ikke går etter eieren første gang, men du bør ikke fortvile, fordi kretsen kan modifiseres og roboten konfigureres etter behov. Ifølge forfatteren, i fremtiden kan programvare installeres på roboten, takket være hvilken den vil gjenkjenne gjenstander og mennesker. Du kan også installere mange forskjellige sensorer og gjøre denne roboten til en høyteknologisk enhet.