

Pultoider kalles slike roboter som kan kontrolleres eksternt ved hjelp av fjernkontrollen. En TV-fjernkontroll kan for eksempel brukes til disse formålene. Hovedoppgaven som forfatteren satte seg i produksjonen av en slik robot, er enkelheten i monteringen. til gjennomgang roboten krever ikke produksjon av et trykt kretskort, installasjonen er veldig enkel og skjer bare på papp.

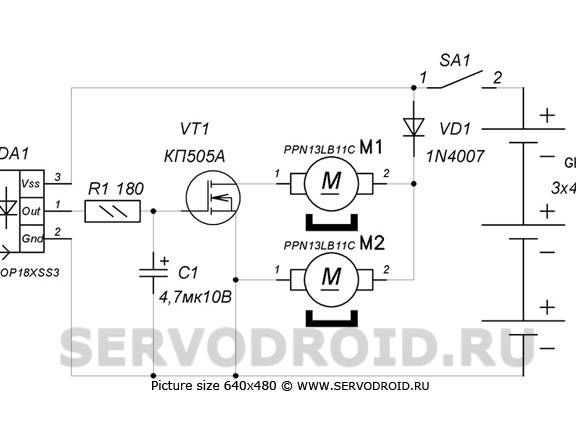
elektronisk Robotkretsen består av bare fire komponenter: en diode, en transistor, en fotodetektor og en kondensator. For fremstilling av den mekaniske delen vil det også være behov for et minimum av materialer, for eksempel brukes en CD-ROM for å lage saken.
En robot laget på denne måten vil forstå bare ett team. Det er verdt å trykke på hvilken som helst knapp på kontrollpanelet, og roboten begynner å snu. Hvis du fortsetter å holde inne knappen, vil rotasjonsvinkelen bli større, som et resultat kan roboten snu 360 grader.
Robotenhet
En kompakt disk brukes som basis for fremstilling av roboten. Når det gjelder kraftelementene, er de festet med M2-bolter. Det elektroniske brettet, også batterirommet, er festet med tape.
Når det gjelder motorene, er de plassert i vinkel, og akslene hviler mot veien. Dermed er det ikke nødvendig å produsere hjulene separat. Bolter festes ved hjelp av rammer som er laget av en skolelinje.
Tre “lillefingre” -batterier mater roboten, de er installert i et spesielt tilfelle. Totalt produserer strømforsyningen 4,5 V.
Og til slutt, fotodetektoren, det er bare en her, det er en type TSOP. Den mottar modulerte signaler fra hvilken som helst fjernkontroll, takket være hvilken robot kan styres.
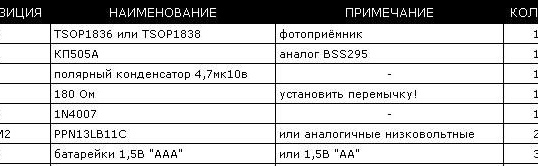
Materialer og verktøy for produksjon:
- nylonbånd;
- fotodetektor type TSOP1836;
- en felteffekttransistor (KP505A);
- en kompakt disk;
- fular for batterier i tre seksjoner;
- tre "små" batterier;
- plast linjal;
- skruer for å feste rammen;
- ledninger og bryter (cross over type).
Produksjonsprosess:
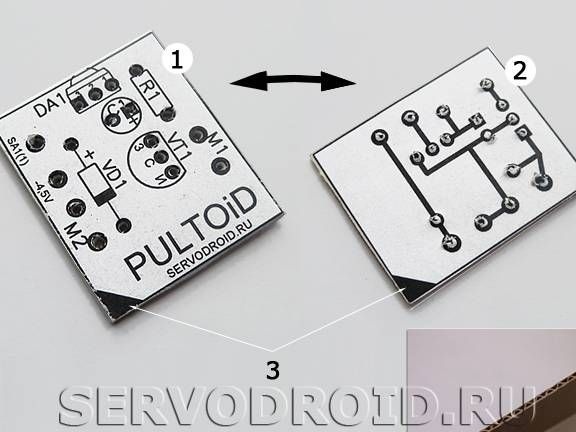
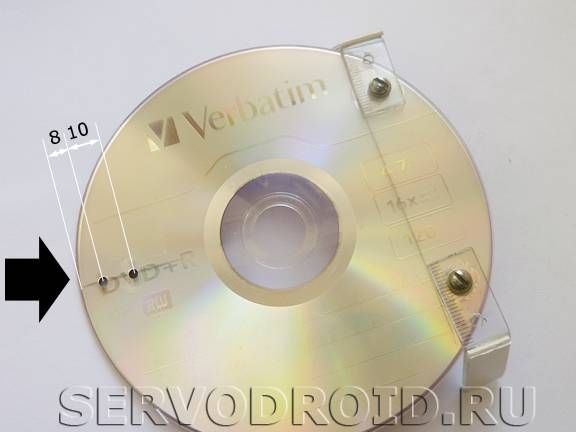
Første trinn. PCB-design
For å lage et trykt kretskort, må du først skrive ut en tegning på papir. Du bør få to bilder, på en installasjonstegning og på den andre siden av brettet. Totalt vil brettet bestå av tre elementer, i sentrum vil det være en bølgepapp limt med kontorpapir på begge sider. For å lim brettet, anbefales det å bruke en tørr limpinne.
Trinn to Installasjon av radiokomponenter
Når du installerer elektroniske komponenter, er det viktig å ikke glemme eller kutte av de utstående kantene på kontaktene. Deretter vil de bøyes, og dermed opprettes en elektrisk krets. Alle elementer kobles sammen ved lodding i henhold til det spesifiserte skjemaet.
Motstand R1 i kretsen må byttes ut med hvilken som helst jumper. Når det gjelder fotodetektoren, vises også riktig rekkefølge på tilkoblingen på bildet.

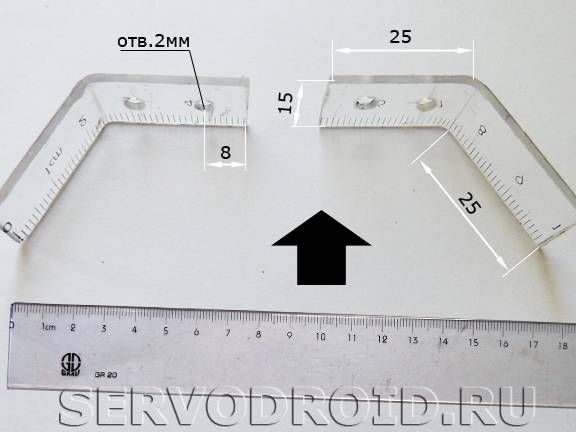
Trinn tre Installering av kraftramme
For å installere motorene, må du lage en strømramme. Som materiale vil en plastisk linjal brukes her. Den må kuttes i to deler og bøyes som angitt på bildet. For å få linjalen til å begynne å bøye, må du bringe den varme loddejernspissen til et sted med avbøyning i en avstand på omtrent 2 mm. Også for disse formålene kan du bruke en hårføner i konstruksjonen. Linjalen må bøyes jevn til en vinkel på omtrent 30 grader.

Etter at rammen er opprettet, kan du fortsette med installasjonen. For å gjøre dette, ta CD-en og 2 mm-skruene med muttere. Videre bores hull med en diameter på minst to millimeter på de rette stedene, og rammen er festet med skruer. Slik at rammen ikke sklir, må du feste dobbeltsidig tape på platen før du installerer den.
Trinn fire Installere frontstøtten
Foran på platen, må du bore to hull og forberede en nylonmasse. Avrettingsstørrelsen skal være 3x150mm. Det må settes inn som angitt på bildet. Som et resultat vil den resulterende støtten svekkes perfekt under operasjonen av roboten og glir langs veien.


Trinn fem Motorinstallasjon
For å forhindre at motoraksler glir langs veien, må det settes beskyttere på dem. De er laget av tannkjøtt, som du finner på pastaene av heliumpenner. For å installere motorene, må du først lime et stykke dobbeltsidig tape på støtten, det vil forhindre at den glir. Vel, da er motorene endelig festet med nylonbånd.

Trinn seks Bryter og strømforsyningstilkobling
Som strømkilde kan du bruke ethvert batteri hvis strøm ikke overstiger 5 volt. I dette tilfellet brukes en sak til tre fingerbatterier, som til sammen 4,5 V.
Når det gjelder bryteren, er den montert på gapet til den positive kontakten som kommer fra strømkilden. Den røde ledningen er festet til brettet for å tappe SA1 (1), og den svarte ledningen til stift -4,5V.


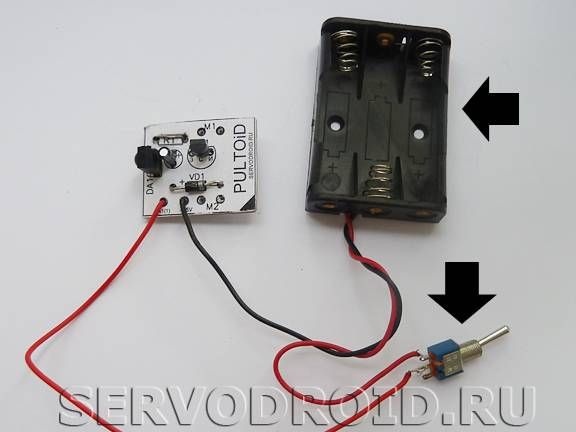
Også på dette stadiet kan du koble motorene, ledningene deres er koblet til kontaktene M1 og M2.
Syvende trinn. Avsluttende etappe
I sluttfasen må alle elektroniske elementer fikses. De er festet til disken ved å bruke dobbeltsidig tape. Når det gjelder bryteren, må den også fikses, for dette kan du bruke varmt lim.

Det er alt, nå er roboten klar. Du kan prøve å slå den på og gi en kommando om å slå på med hvilken som helst fjernkontroll.