
Det særegne ved BIBOT-1-roboten er at den kan utføre to oppgaver. Den kan bevege seg bak en lyskilde eller langs en svart linje som kan tegnes på papir. Roboten veldig fleksibel i innstillinger, det vil si at den senere kan tilpasses til ønskede forhold, det vil si for å gjøre den mer følsom for lys eller mindre. Det er også mulig å justere motorens rotasjonshastighet, dette vil gjøre det mulig for roboten å fungere bedre, spesielt når du beveger deg langs linjen.

Enheten og prinsippet til roboten:
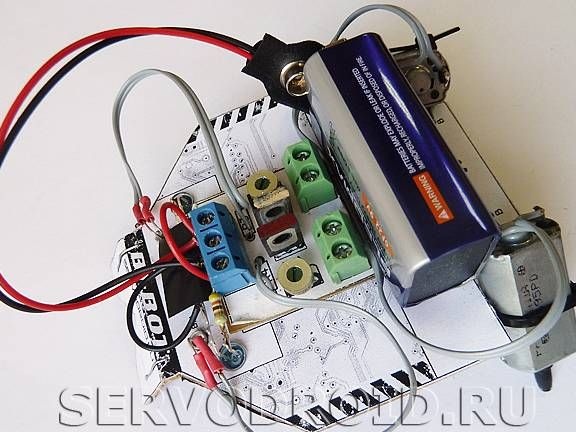
Basen til roboten er laget av papp, malen skrives ut på skriveren og krasjer deretter. Når det gjelder modulen med radiokomponenter, ble en tekstolit tatt som basis, modulen er festet til basen til roboten. For å gjøre kroppen stivere brukes spesielle ribber i designet.
Motorer er installert som i de fleste av disse DIY, det vil si i vinkel. På grunn av dette er det ikke nødvendig å sette hjul og girkasse. For å forhindre at sjaktene glir over overflaten, blir det satt beskyttere på dem.
Et 9V batteri 6F22 brukes som strømkilde. Batteriet er festet med tape og er alltid tilgjengelig for enkel utskifting.
Når det gjelder bryteren, da biler bestemte meg for å unngå å installere den. Roboten slås av og på ved å manipulere klippet som festes til batteriet.
Og til slutt justeringen av roboten. For å justere følsomheten til roboten har systemet to justeringsmotstander. Når de roterer, kan du justere robotens følsomhet til lys, og du kan også justere rotasjonshastigheten til motorene. Jo mer følsom roboten er for lys, jo raskere vil den bevege seg, og omvendt.
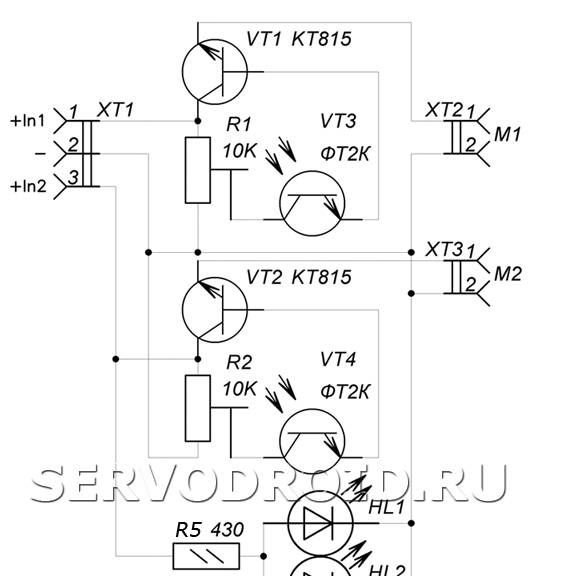
Når det gjelder driftsprinsippet, er alt beskrevet i diagrammet.
Materialer og verktøy:
- 9V batteri og klips for tilkobling;
- to kontakter for tilkobling av motorer (koplingsblokker med to deler);
- motorer;
- nylon avrettingsmasse;
- beskytter (gummirulle);
- to fototransistorer;
- to infrarøde LED-er;
- en brakett fra en stiftemaskin;
- tre seksjons terminalblokk for tilkobling av strømforsyning;
- tuning motstand.

Produksjonsprosess:
Første trinn. PCB-design
Avgiften opprettes etter LUT-metoden. Før arbeid må overflaten på glassfiber rengjøres grundig, og deretter vaskes og tørkes grundig. Etter produksjon må ledende spor sjekkes med et multimeter for en kortslutning.
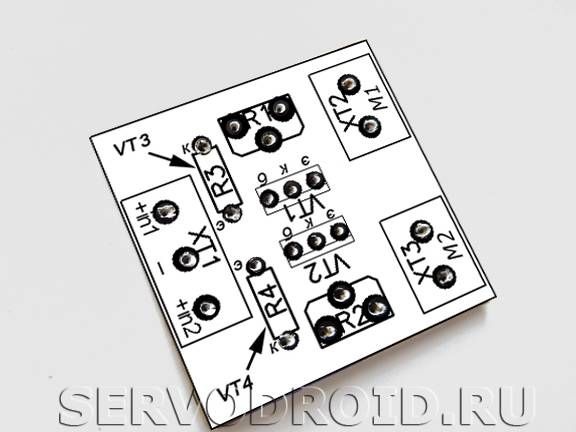
Trinn to installasjon elektronisk element
Deretter må du ta en tegning trykt på papir og feste den på det opprettede brettet. I dette tilfellet må hullene på papiret og i PCB nøyaktig stemme overens. Deretter installeres radiokomponentene som angitt i diagrammet. I løpet av arbeidet må installasjonen av motstander R3, R4 installere fototransistorer VT3, VT4.
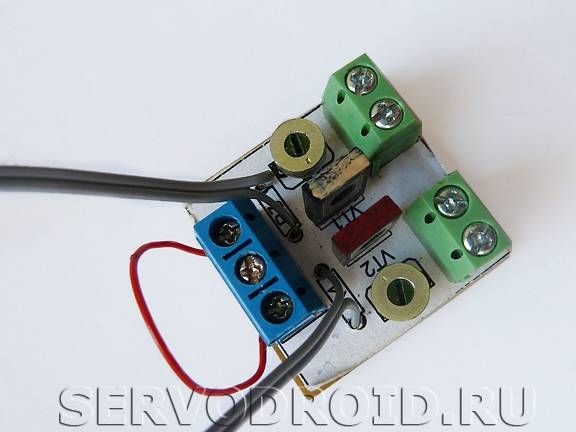
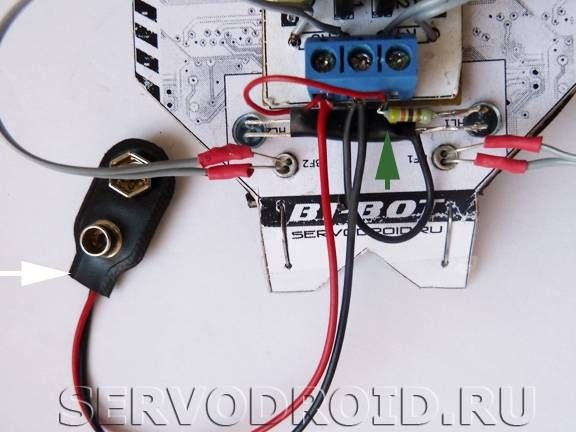
De ekstreme seksjonene av den tredelte koplingsblokken XT1 må kobles til med en monteringsledning. Kontaktenes tilkoblingspunkter må være godt isolert, det er best å bruke et varmekrymperør til disse formål.
Trinn tre Hvordan lage en sak
En tegning av karosseriet må skrives ut på et vanlig ark A4-papir. Deretter må du ta et stykke bølgepapp og feste en tegning på den, deretter må saken kuttes rundt omkretsen.
Der "saksepiktogram" er plassert langs dristige linjer, bør det gjøres kutt. Deretter, langs de svarte prikkede linjene, må du bøye pappen som på bildet og sette de svarte pilene.



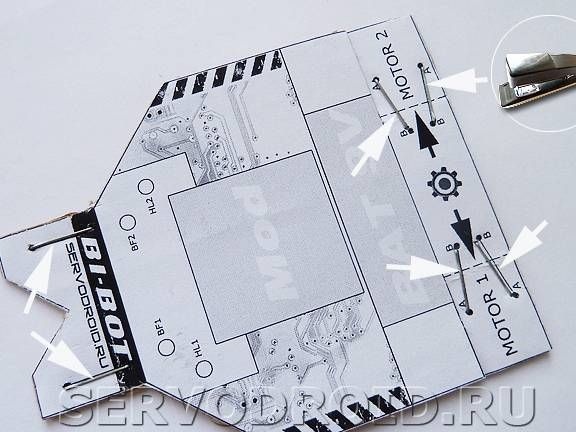


Foran og bak på huset til angitt stilling ved hjelp av en stiftemaskin. Du må installere beslagene. Steder der installasjonen er merket med svarte linjer med sirkler. Stifter er nødvendige for å gjøre rammen stivere. Etter montering av brakettene er de slitsomme å bøye seg langs foldelinjene.
På stedene merket BF1, BF2, må du lage hull for installasjon av fototransistorer. På steder HL1, HL2, må du lage hull i en slik størrelse at de passer til diameteren på foringsrøret på infrarøde LED-er.
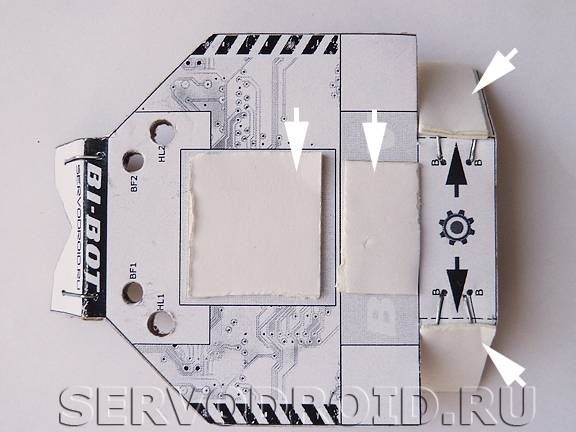
På steder som er betegnet som Mod "," BAT 9V "og" MOTOR 1 "," MOTOR 2 ", klistrer du stripene med tosidig tape.
Trinn fire Installasjon av motorer
Motorer er montert i posisjon med nylonbånd. For å forhindre at sjakter glir, må de bæres med beskyttere. De er laget av gummibånd, som er i heliumstavene til penner. Lodd ledningene til motorene på samme trinn.


Trinn fem Installasjon av infrarøde LED-er
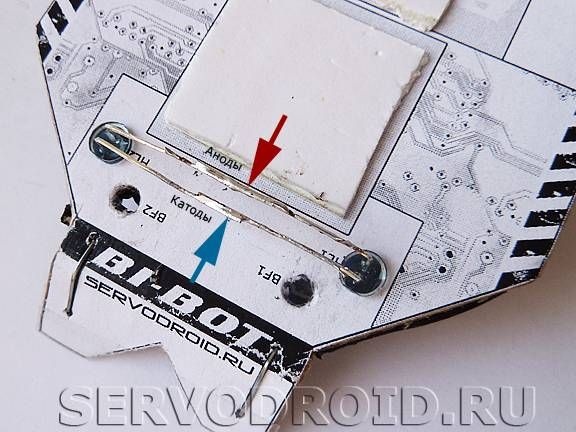
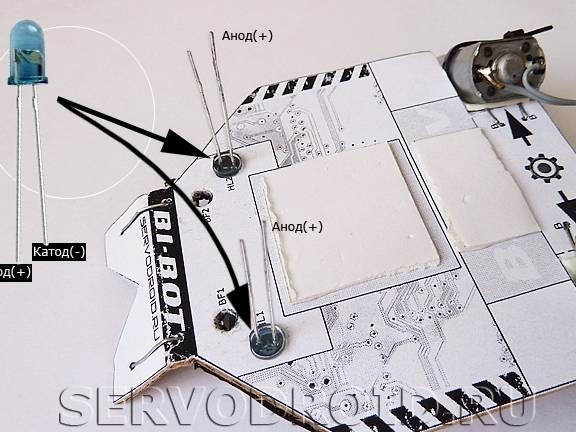
Når du installerer infrarøde LED-er, er det viktig å ikke forveksle konklusjonene sine, for importerte elementer er en lang kontakt en anode, det vil si et pluss. Lysdioder er installert på posisjonene HL1, HL2 som vist på bildet. Funnene er bøyd slik at diodene kan kobles parallelt.
En 430 ohm-motstand må loddes til den positive kontakten til lysdiodene, og en svart ledning til den negative kontakten.
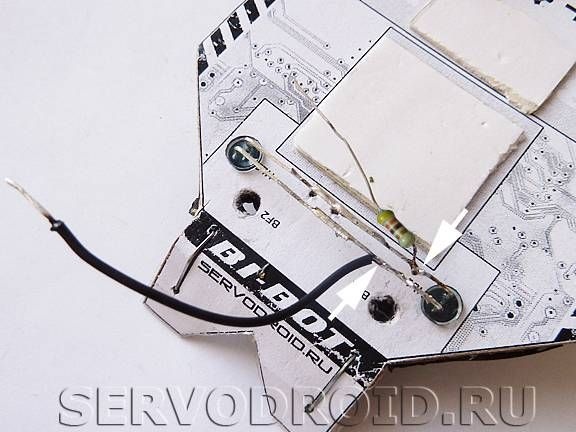
Den andre enden av den svarte ledningen må kobles til midtstiften på den tredelte koplingsblokken. Når det gjelder utgangen fra motstanden, er den koblet til terminalen til terminalblokken.
Trinn seks Endelig byggefase
For at roboten skal bevege seg langs linjen, settes fototransistorene på plass BF1, BF2 som på bildet.
Transistorer for bevegelse bak lyskilden er plassert på baksiden.
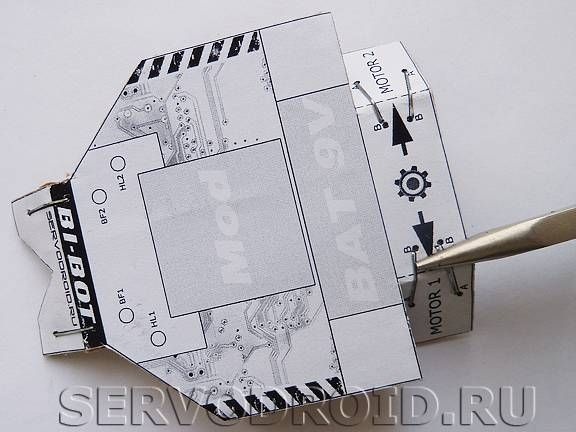
Avslutningsvis er motorene tilkoblet, og batteriet er satt.


Det er alt, roboten er klar. Nå kan du prøve å slå den på og konfigurere den til de ønskede forhold.