

I videoen kan du se hvordan roboten fungerer. Det skifter gradvis farge under drift.

Materialer og verktøy for montering av roboten:
- U-formede monteringsbraketter;
- fire 1,5V LR44-batterier hver;
- RGB-LED i flere farger med koblingsfunksjon;
- isolasjonsrør;
- pushpin av stål;
- lavspent motor type RF-300CA;
- knapp for å slå på roboten (med to ledninger);
- ledninger for tilkobling av motoren;
- blinkende alarm-LED.
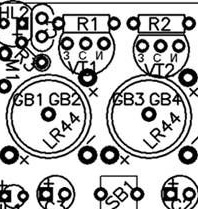

Angående det nødvendige elektronisk elementer, de er vist på figuren. Det trykte kretskortet er laget av et folieplate av PCB, dimensjonene er bare 30X30 mm. Forfatteren anbefaler også bruk av små polare kondensatorer for montering.
Robotproduksjonsprosess
Første trinn. Skjematisk diagram av roboten
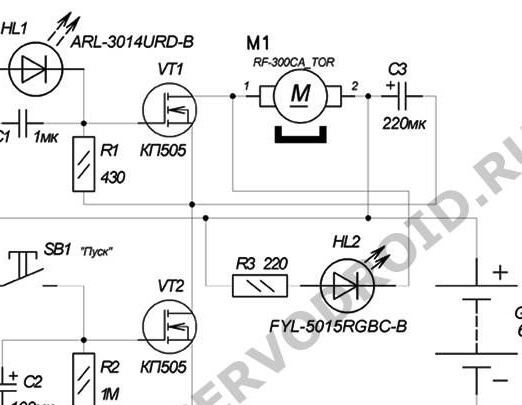
Robotkretsen kan sees på figuren. Etter å ha satt inn batteriet er roboten i slått av tilstand, for å slå den på, trykk på SB1-knappen. Umiddelbart etter dette lades kondensator C2 øyeblikkelig. Den positive platen fra kondensatoren er koblet til porten til felteffekttransistoren VT2. I denne forbindelse reduseres motstanden for avløpskildekanalen til denne kanal øyeblikkelig når en terskel terskel når, og en negativ potensiell ladning dannes ved avløpet. Det som skjer videre kan sees mer detaljert i diagrammet.
Trinn to Monter RGB LED
LED under nummer 1 er montert på kretskortet. På tegningen kalles denne posisjonen HL2. Etter at LED-en er installert, må konklusjonene bøyes slik at LED-en ledes mot siden. Under drift vil lysdioden ikke lyse opp, men til siden og belyse veggene. I hvilken retning lyset vil skinne indikeres med en svart pil.

Trinn tre Monter batteri monteringsbraketter
For å gi kontakt mellom batteriet og roboten brukes trykknapper.Den ene knappen er installert i midten, i diagrammet er den merket som GB1, GB2, og den andre er satt til posisjon GB3, GB4. For å fikse kontaktene sikkert, loddes knappene med en stor mengde lodde.


Batteriene er installert på metallknappen under nummer 3. Batteriene er festet med et U-formet feste, på hvilket isolatorer fra rør er slitt. Den øvre delen av braketten må bøyes lett med en bue nedover, dette gjør at batteriene kan presses til den nedre kontakten. Isolerende rør er nødvendig, slik at de vertikale flatene til batteriene ikke kommer i kontakt med horisontale.
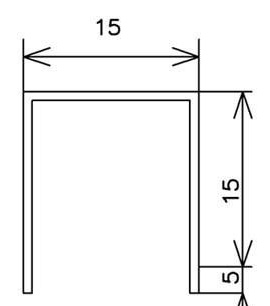
For å lage et U-formet feste må du bruke to binders. De må bøyes til en U-form, som indikert på tegningen. Eventuelle rør kan brukes, polyvinylklorid brukes her. Deres høyde skal være lik høyden på batteriene.
Installer braketten ved lodding, for dette må du tinne endene. For tinning er det nødvendig å bruke en nøytral, ikke-vaskende flux.
Trinn fire Monter motoren
Motoren er installert på siden av brettet der sporene passerer, den er plassert med akselen nede. For å feste motoren, kan du bruke varmt lim eller dobbeltsidig tape. Men før du monterer motoren tett, må du koble den til og sjekke hele systemet for driftssikkerhet.

Trinn fem Oppsett og testing hjemmelaget
Etter montering av roboten kan du teste og konfigurere. For å gjøre dette, må du installere batterier i roboten, de er installert i stedet for GB1, GB2 og GB3, GB4. I dette tilfellet må elektronikken være i av-tilstand. Etter at batteriene er installert, kan roboten slås på, dette gjøres ved å bruke SB1-knappen. Etter å ha trykket på den, skal motoren begynne å fungere, HL1-LED-en vil blinke, og RGB-LED-en lyser også.
Etter en tid vil roboten automatisk slå seg av, den vil stoppe og alle dioder vil gå ut. Deretter slås den på på samme måte som for første gang ved å trykke på en knapp.

For å justere tiden for roboten, må du eksperimentere med verdiene av motstand R2 og kondensator C2, de er ansvarlige for denne funksjonen. Hvis du trenger å stille inn maksimal betjening av roboten, skal kondensatoren være så stor som mulig. På en så enkel måte kan du sette sammen en så interessant robot.