
Denne roboten styrt av Bluetooth-smarttelefon. Akselerometeret til smarttelefonen måler vinkelen på telefonen til venstre / høyre, opp / ned, bruker disse dataene til å beregne hastigheten på retningsmotorer, dataene overføres via Bluetooth til Arduino
Det du trenger for å bygge en robot.
Arduino uno, HC-06 Bluetooth-modul, to 300 omdreininger 12v girmotorer, H-bridge L298N Dual H Bridge Motor Controller
12 til 1,3 Et blybatteri. Hver motor bruker 0.4A, pluss forbruket av førerlogikk. Arduino-ledninger, vanlige 9v-batterier og en kontakt for å koble batteriet til Arduino. Elektriske ledninger for tilkobling av elektriske motorførere. USB-kabel. Telefon med Android versjon 4 og nyere. 4 svingbare 50 mm gummihjul fra Screwfix eller Toolstation; To Lynxmotion HUB-02 universalnav.










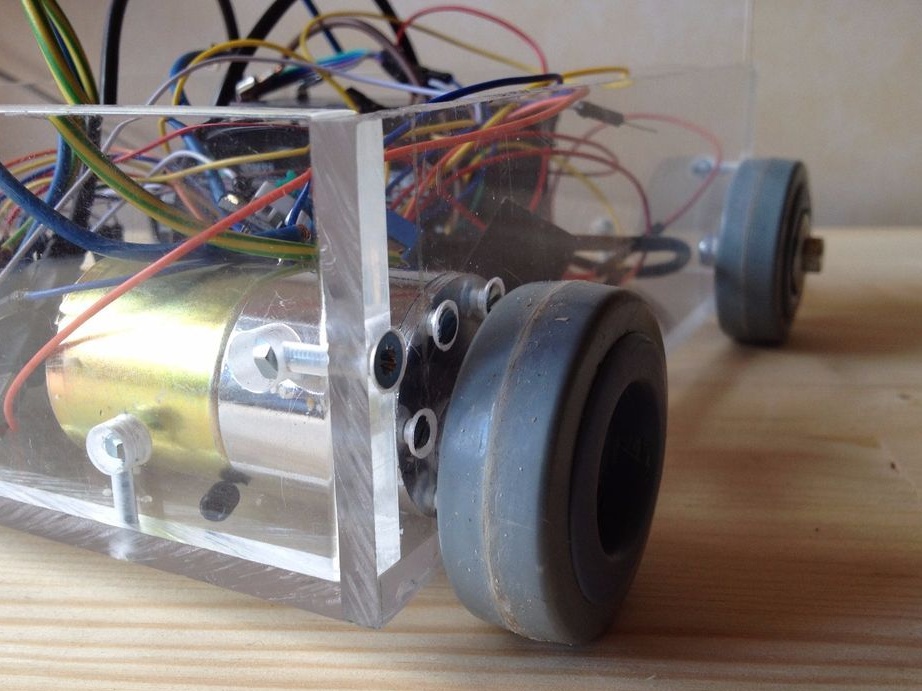
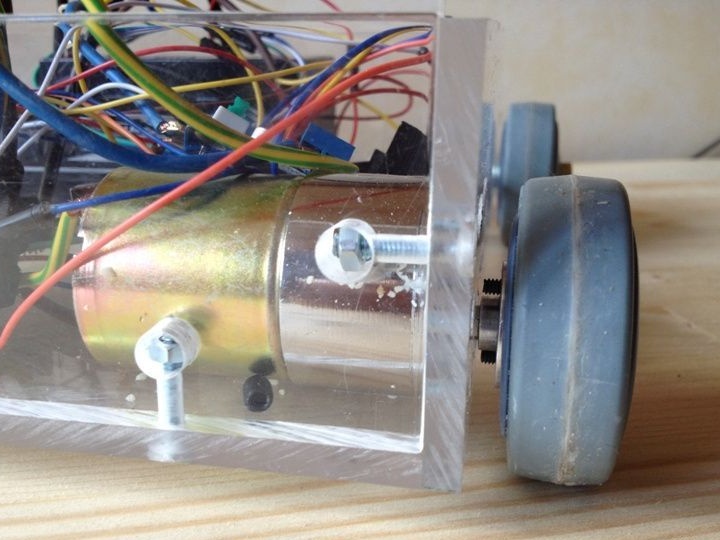
Vesken er satt sammen av plast 22 cm lang og 17 cm bred. To motorer må kobles til akselen og festes med en gjengestift.
Forhjul
Gummien fjernes fra valsene og det bores to hull i dem i samsvar med hullene på navene. Navene er festet på aksene som går gjennom huset med gjengestifter. Etter det festes ruller på navene, og gummi blir satt på dem.
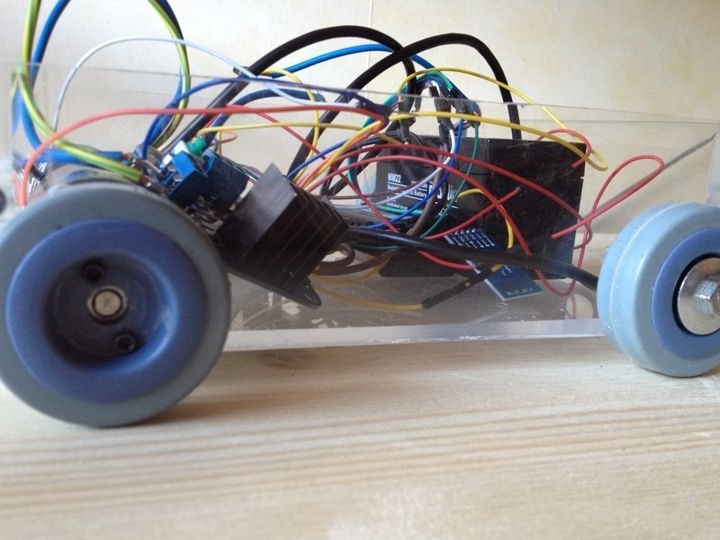
Bakhjul
Bakhjulene skrus enkelt løs fra hengslet og festes gjennom hull som er boret i huset.
Elektriske tilkoblinger.
Det vil være problemer med å laste programkoden i Arduino. Dette skyldes det faktum at Bluetooth-modulen, dens RX \ TX-kontakter, er koblet til Arduino-pinnene 1 og 2, som også brukes til å overføre data via USB. Det er nødvendig å endre kontaktene 1 og 2 til 11 og 12 i det tilkoblede biblioteket, som vil bli brukt til dataoverføring.
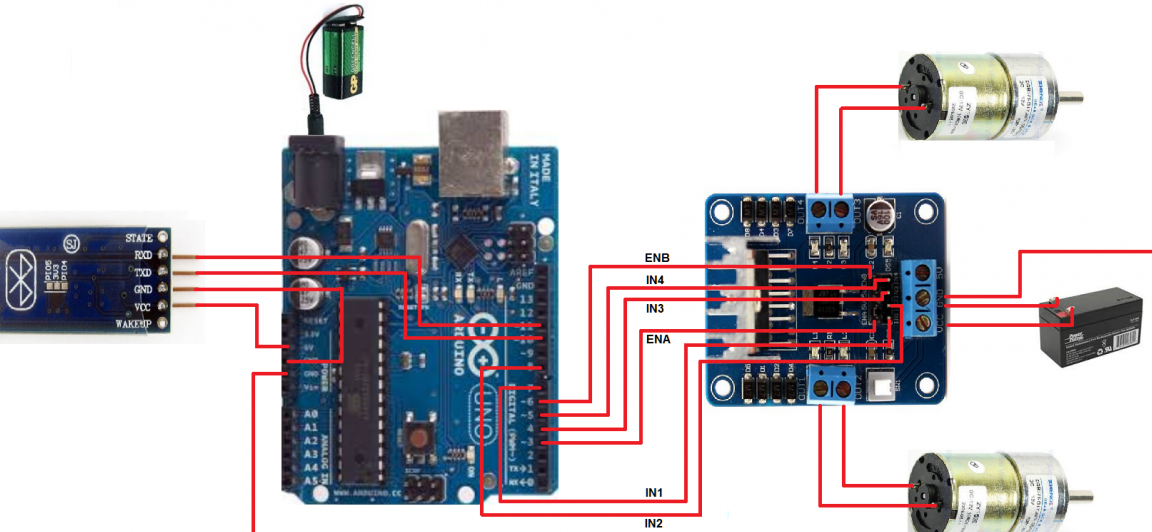
Motordriveren trenger ikke en egen strømforsyning for logikken. 12V er nok til å drive driverlogikken og selve motoren. Minuset til batteriet skal kobles til både Arduino og motorføreren. ECA / 5V og ENB / 5V motorførerkontakter kan hoppes. Det må fjernes før det kobles til Arduino. Ingenting skal kobles til de to 5V-pinnene.
Android-kode.
Den vedlagte filen må pakkes ut og importeres til Android Studio, pakke den i apk og installere på telefonen.
Nøkkelfiler:
Parvise enheter Aktivitet:
deviceList.java
activity_device_list.xml
Aktivitet for LED og bevegelseskontroll:
ledControl.java
activity_led_control.xml
manifest:
AndroidManifest.xml
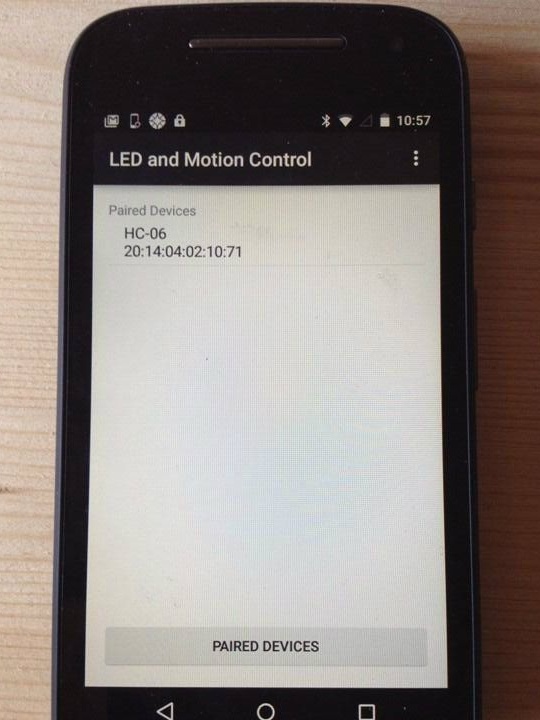
Parvise enheter Aktivitet viser tilgjengelige Bluetooth-enheter. Så snart enhetene er koblet til, overføres kontrollen til LED og Bevegelseskontrollaktivitet.
Av / på-knappene sender en “på” eller “av” melding til Arduino, og slår den innebygde lysdioden på eller av. Telefonens akselerometer, som overfører x / y-verdier fra sensoren, kontrollerer bevegelsen hver gang disse verdiene endres. Basert på dette beregner Arduino hastigheten og rotasjonsretningen til motorene i området 0 til 255. Det overfører disse Arduino-verdiene i form av 'L-255:' eller 'R100', etc. Basert på dette sender Arduino rotasjonshastighetskommandoene til venstre motor til ENA, den høyre til ENB og endrer rotasjonsretningen ved å endre polariteten til IN1, IN2 for venstre, N3 og N4 for høyre motor.