Neste fredag kveld ønsket forfatteren å samle noe interessant. Han husket at han så prosjektene med å tegne roboter, og ha en kontinuerlig rotasjonsservo, og det ble besluttet å sette sammen en slik robot. En kontinuerlig rotasjonsserve kan lages av vanlig.
materialer:
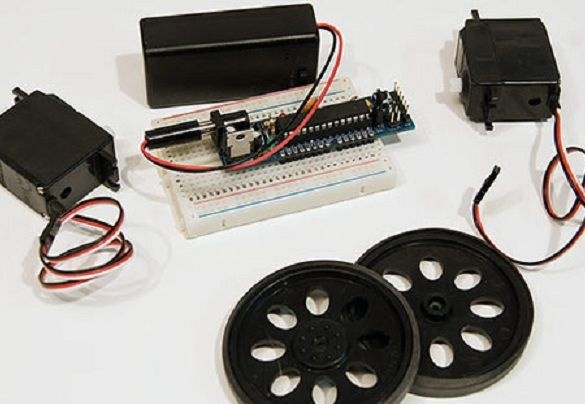
- DC Boarduino (dette er en klone Arduino)
- Servo for kontinuerlig rotasjon av 2 stk
- Servohjul 2 stk
- brødbrett
- 9V batterikontakt med 2,1 mm plugg og bryter
- koble ledninger
Det er ikke nødvendig å bruke Boarduino i dette prosjektet, noe Arduino-styre er nok. Forfatteren valgte dette brettet på grunn av størrelsen. Du trenger også et visst antall markører, du kan kjøpe et sett med forskjellige farger til denne roboten.
I tillegg trenger du et 9V-batteri og sokkelen for tegnetrobotens karosseri.
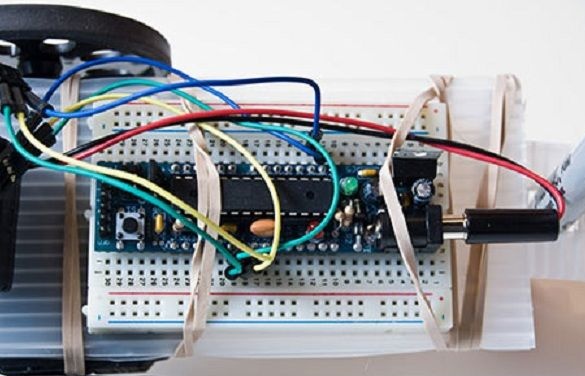
Det er ikke noe komplisert i monteringen av roboten. Først av alt, forfatteren fester hjulene med to servoer med limbånd, og målte avstanden mellom hjulene. Det er nødvendig at bredden på basen er litt mindre enn avstanden mellom hjulene. Forfatteren bruker bølgeblikk, siden den er ganske lett og holdbar, og det er ikke vanskelig å jobbe med det. Bruken er selvfølgelig ikke viktig, du kan til og med bruke papp eller plast fra kasser til disker.
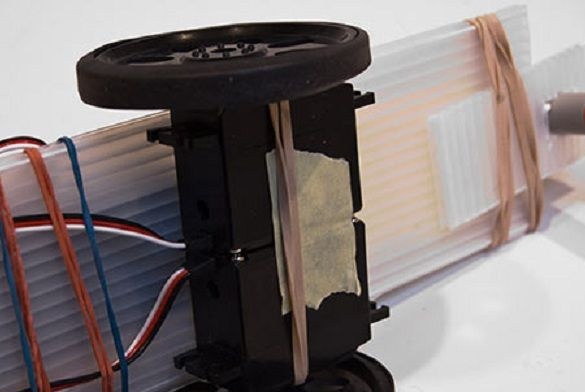
Servo-stasjoner ble koblet til basen med gummibånd. Ved plassering av batteri og brødplate oppstod det vanskeligheter, siden det var nødvendig å opprettholde balansen. Forfatteren ønsket å gi mer plass på siden som markøren ble plassert med, men ønsket ikke å gjøre en fordel på motsatt side. Ved hjelp av gummibånd er det ganske enkelt å justere plasseringen av komponentene, og bestemme den optimale.
Gjennom hele prosjektet brukes ledninger med BLS-pinner for å koble seg til brødplaten, servo-stasjoner er også koblet til dem.
Da forfatteren var ferdig med alt arbeidet med å montere roboten, ville han umiddelbart sjekke ytelsen. Det tok litt tid å søke etter koden. Etter å ha snublet over en artikkel om kontroll av Parallax kontinuerlig rotasjonsservo ved bruk av Arduino, innså han at han var på rett vei. Koden ble forenklet så mye som mulig, for øyeblikket Drawbot kan bare gå i sirkler.Dette er selvfølgelig primitivt, men det er også en flott start og grunnlaget for utvikling og modernisering. Koden kan lastes ned under artikkelen.
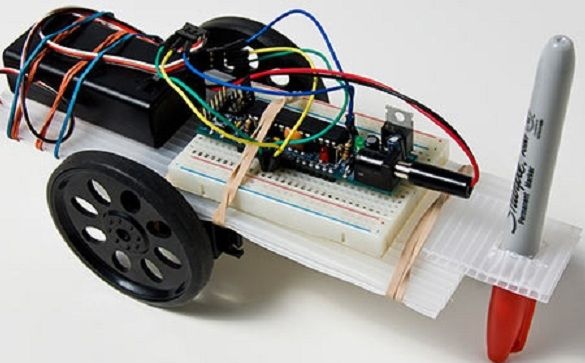
Nå har forfatteren fått en robot som reiser i en sirkel. Fortsetter arbeidet tok forfatteren restene av bølgeplast og laget et hull i den ved hjelp av en kniv. Hullet ble skåret med en diameter som var litt mindre enn nødvendig, takket være det reduserte hullet var markøren i det perfekt festet. Hvis du bruker papp, blir ikke denne effekten, og markøren vil ikke holde godt eller falle ut.

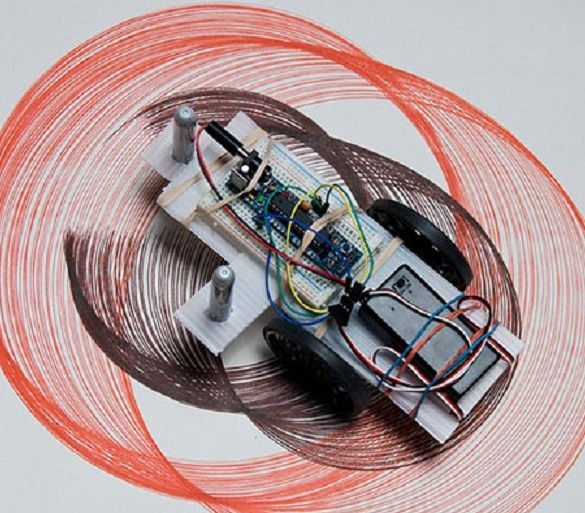
Etter å ha installert markøren er det på tide å teste roboten. Ved å sette den på midten av 24x18 arket og slå den på, så forfatteren til slutt Drawbot i aksjon. Han begynte å snurre tegnesirkler. Vi kan si at forfatteren klarte å lage en robot som skaper et slags kunstverk.
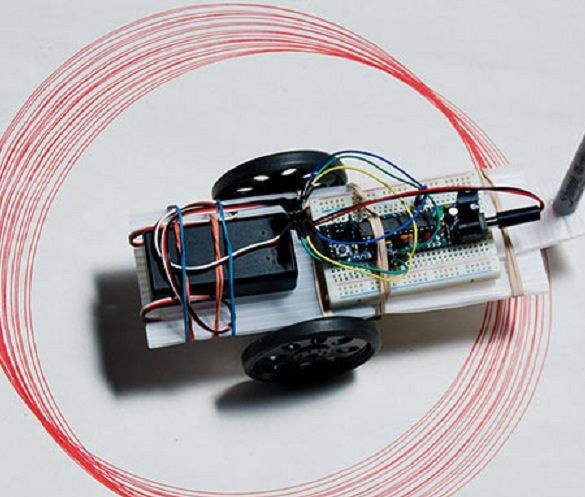
Bildet kom litt vanskelig ut på grunn av arket som lå på gulvet, og det var ikke helt jevnt, og mest sannsynlig roterte ikke servoene synkront. Det viste seg at den ene sirkelen kunne være lavere, den andre høyere, og den neste fortsatt litt høyere eller lavere. Antagelig, på et ideelt sted, ville alle sirkler være på linje i en linje. Det vil se penere ut.
Forfatteren trodde at den andre markøren kunne lyse opp situasjonen, og roboten vil lage mer interessante bilder. Resultatet var bra, sirkler begynte å krysse hverandre. Det vil være mer interessant å se hvordan Drawbot oppfører seg på et stort papirark.
Ved å slippe roboten på en papirflate, kan forfatteren få en sirkel eller en gjeng med sirkler. Men med en ferdig robot kan du allerede nå tenke på å forbedre den ved å endre koden.