

Artikkelen vil vurdere et eksempel på å lage en legendarisk robot kalt "Canbot". Hoveddelen av detaljene for roboten er skrevet ut på en 3D-skriver. Roboten styres eksternt.
Materialer og verktøy til hjemmelaget:
- En Atmel Attiny85-mikrokontroller;
- to mikroservices HXT900 eller deres analoger;
- ett 3,7V LiPo-batteri;
- en infrarød mottaker på 38 kHz;
- ultralyd transduser type HC-SR04;
- 9x4mm bryter eller genser i stedet;
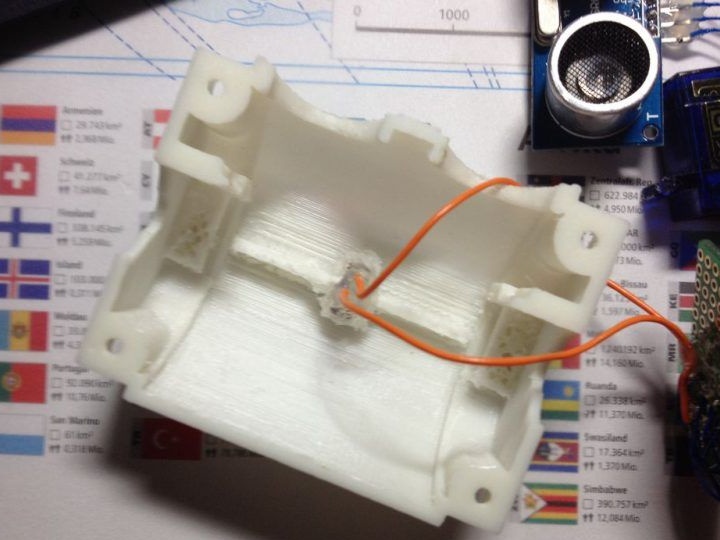
- 3D-deler (mulig). Den vil ta en topp (topp.stl), en bunn (bunn.stl) og to hjul (hjul.stl).
Selvfølgelig vil loddeverktøy, varmt lim, skrutrekkere, skruer, ledninger og andre små ting være nødvendig.

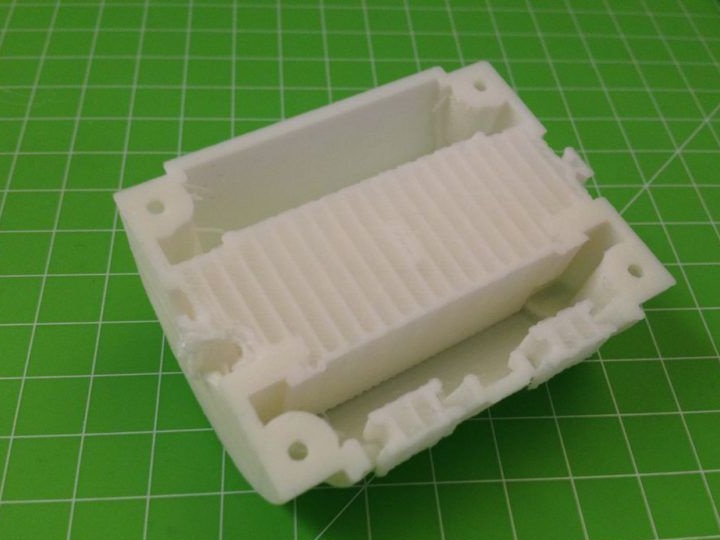
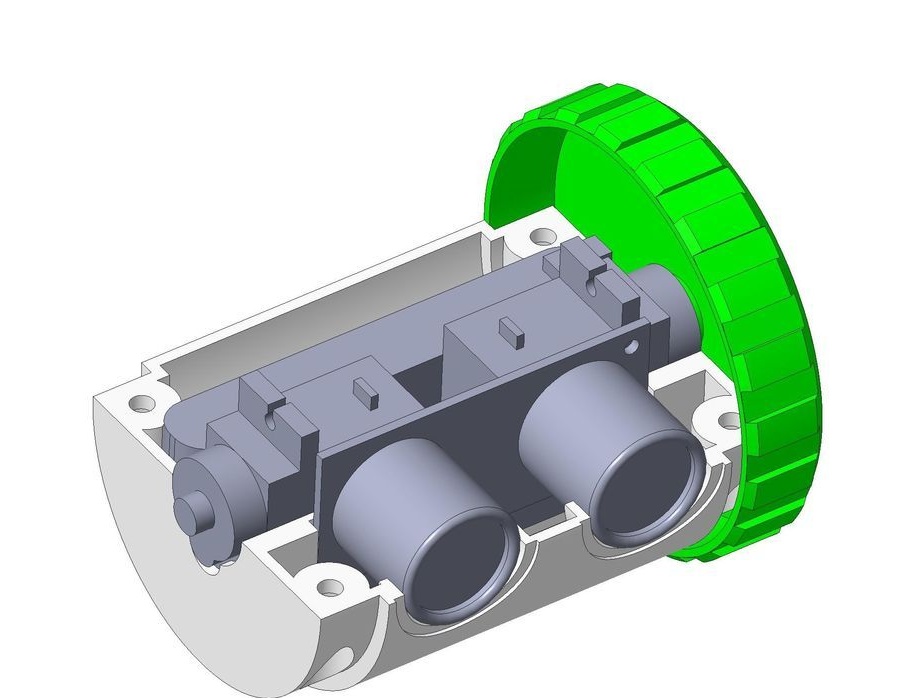
Den øverste og nedre delen må skrives ut med siden ned ved bruk av alternativet "støttestrukturer". Avhengig av hvilken type skriver som ble brukt, kan det hende at ferdige deler må rengjøres på slutten.
Produksjonsprosessen til roboten:
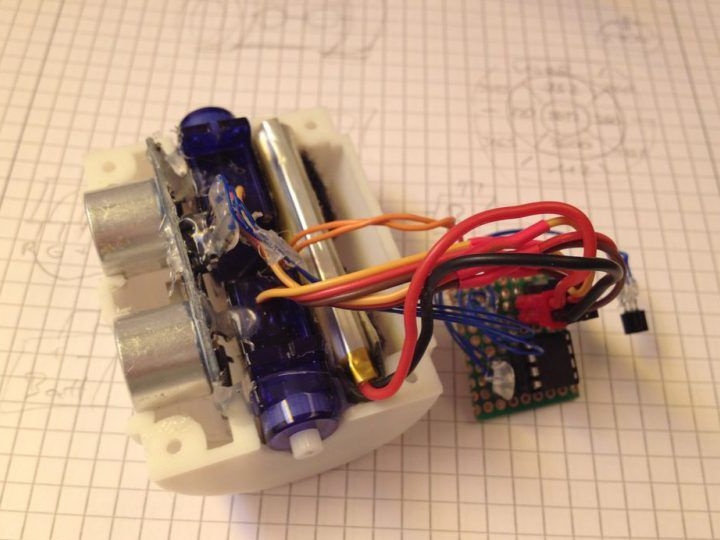
Første trinn. elektronisk en del av roboten
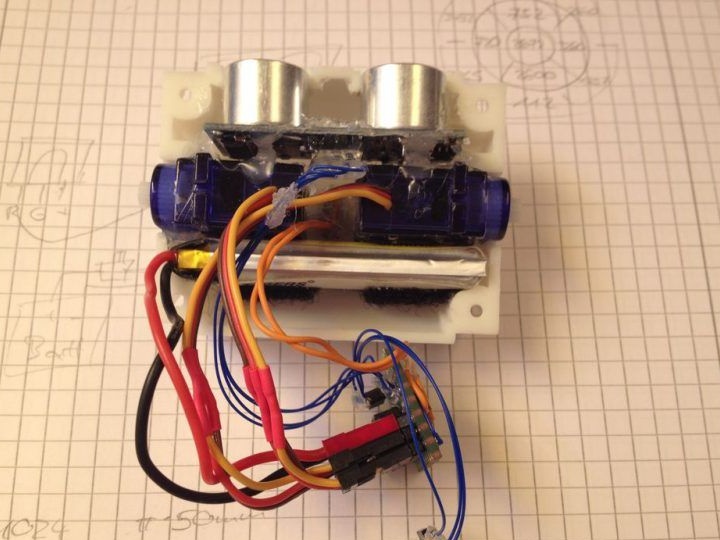
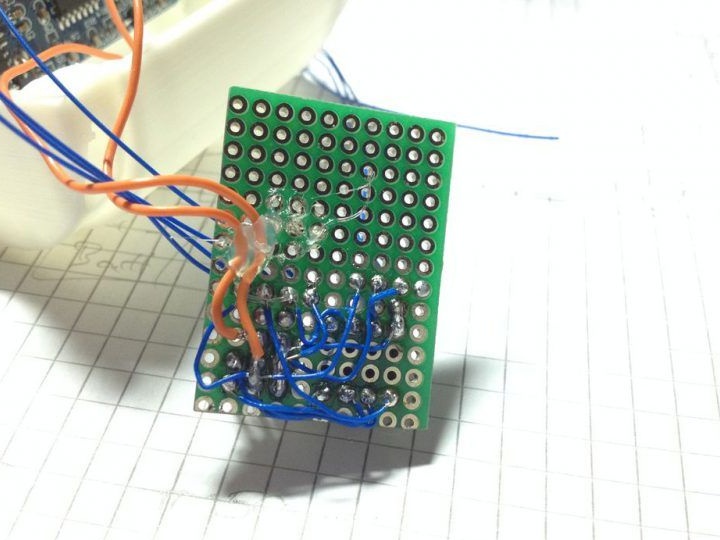
Først må du konfigurere servoer, de må konverteres til kontinuerlig rotasjon. Hvordan du gjør dette, det er mange instruksjoner på Internett. Vel, da må alle elektroniske elementer settes sammen som angitt i diagrammet. Å montere den elektroniske delen var praktisk, kan du ta et lite stykke brødbord, samt tynne ledninger.


Trinn to Programvaredelen av roboten
Hvis du nærmer deg prosessen med å lage en robot med høyeste profesjonalitet, kan programvaredelen skrives uavhengig. Men for dette må du lære et programmeringsspråk. I en enklere versjon kan du laste ned ferdig kode og ganske enkelt laste den opp til mikrokontrolleren.
I følge forfatteren er den beste roboten mottar infrarøde signaler fra Sony-merkets fjernkontroller. I fremtiden vil det være nødvendig å "refash" kodedelen Arduino og sende dataene gjennom Serial.print () -funksjonen. Som et resultat vil det være mulig å finne ut hvilken koding som er på hver knapp.
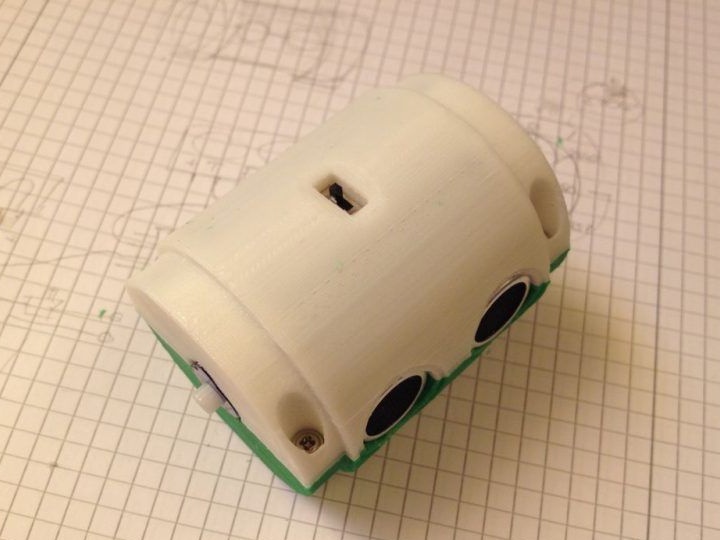
Trinn tre Den siste fasen. Sett sammen roboten
Avslutningsvis går roboten. For disse formålene trenger du varmt lim. Med det må du fikse ledningene slik at de ikke kommer av når roboten beveger seg.Det er også nødvendig å fikse bryteren og fikse ultralydsensoren godt. Avslutningsvis er dekslene til roboten koblet til ved hjelp av fire skruer, som et resultat, om nødvendig, kan det enkelt demonteres. Forresten, skruer til servoer er perfekte for montering.

Det er alt, nå er roboten nesten klar. Det gjenstår å installere hjulene på servomotorakslene, og du kan begynne å teste roboten. Du kan se mer detaljert hvordan hjemmelaget arbeid med videoen.