I dag vil jeg dele min neste homebrew kvist. Det er basert på Lego og Arduino. For kontroll vil vi bruke en fjernkontroll med en 433 MHz sender. Denne gangen ville jeg gjøre et racing en bil. La oss starte:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- 433 MHz radiokommunikasjonsmodul
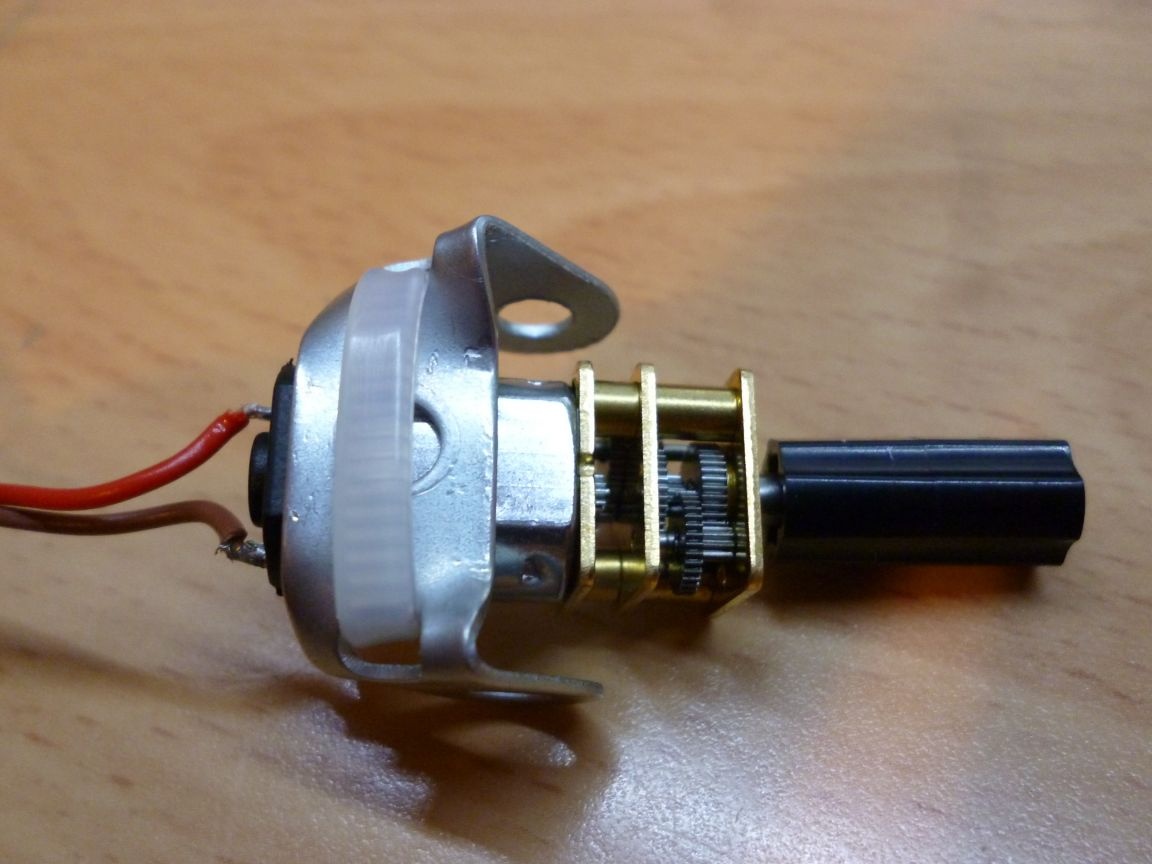
- Motorreduksjon 200 o / min, med en akseldiameter på 3 mm
- 2 lysdioder
- 2 motstander 150 ohm
- Kondensator 10v 1000uF
- 2 enkelt rad kammer PLS-40
- 2 PBS-20-kontakter
- Induktor 68mkGn
- 6 NI-Mn 1,2v 1000mA-batterier
- Kobling pappa-mamma to pinner til tråd
- Homutik
- Ledninger i forskjellige farger
- lodde
- Rosin
- loddejern
- Bolter 3x40 og muttere og skiver til dem
- Bolter 3x20
Trinn 1 monter saken.
Det er nødvendig å montere maskinen vår i henhold til Lego-instruksjonene 42022, det andre alternativet med litt forfining. Vi utfører alle handlinger fra side 3 til 6. Vi trenger ikke en girmekanisme. Lego-motoren trenger heller ikke å monteres. Imidlertid trenger du motorfester samlet på side 14-19, med unntak av gir og aksler. Deretter samler vi alt fra side 20 til 74, bortsett fra spaken på side 25.
Trinn 2 mekaniser kroppen.
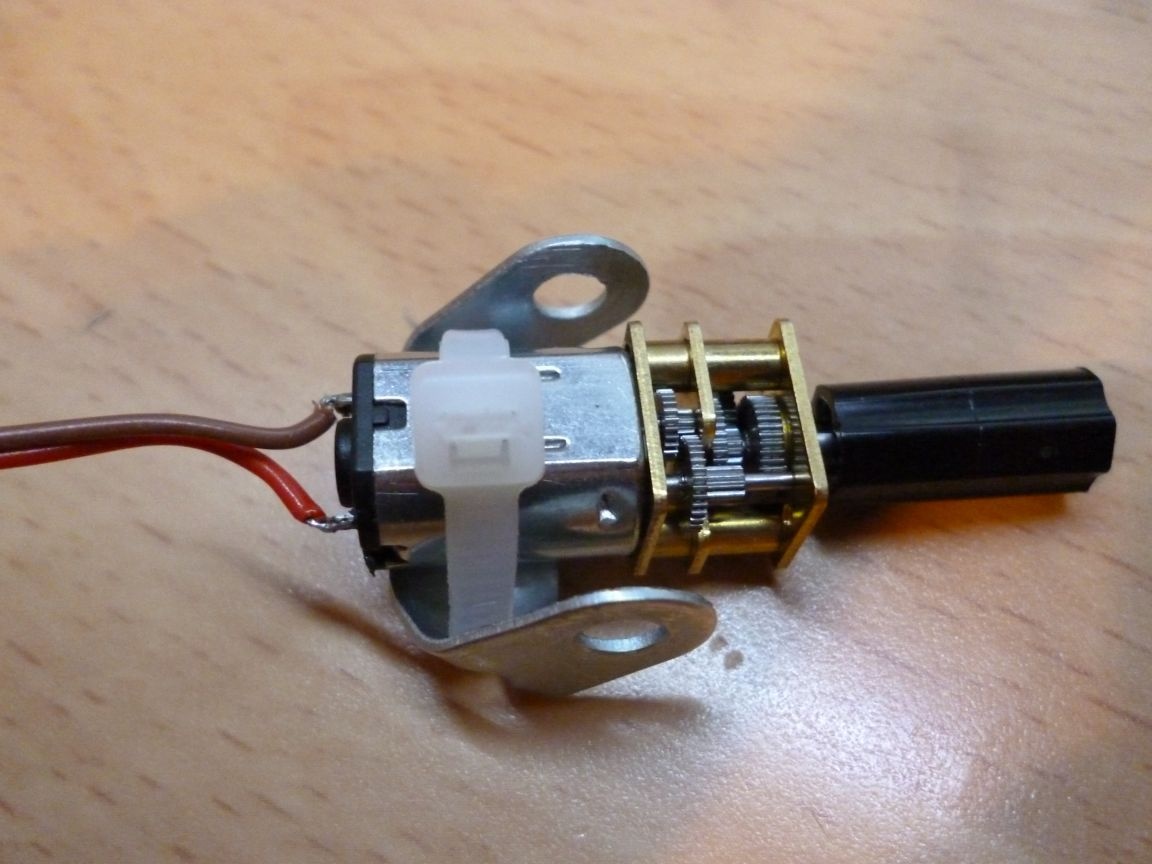
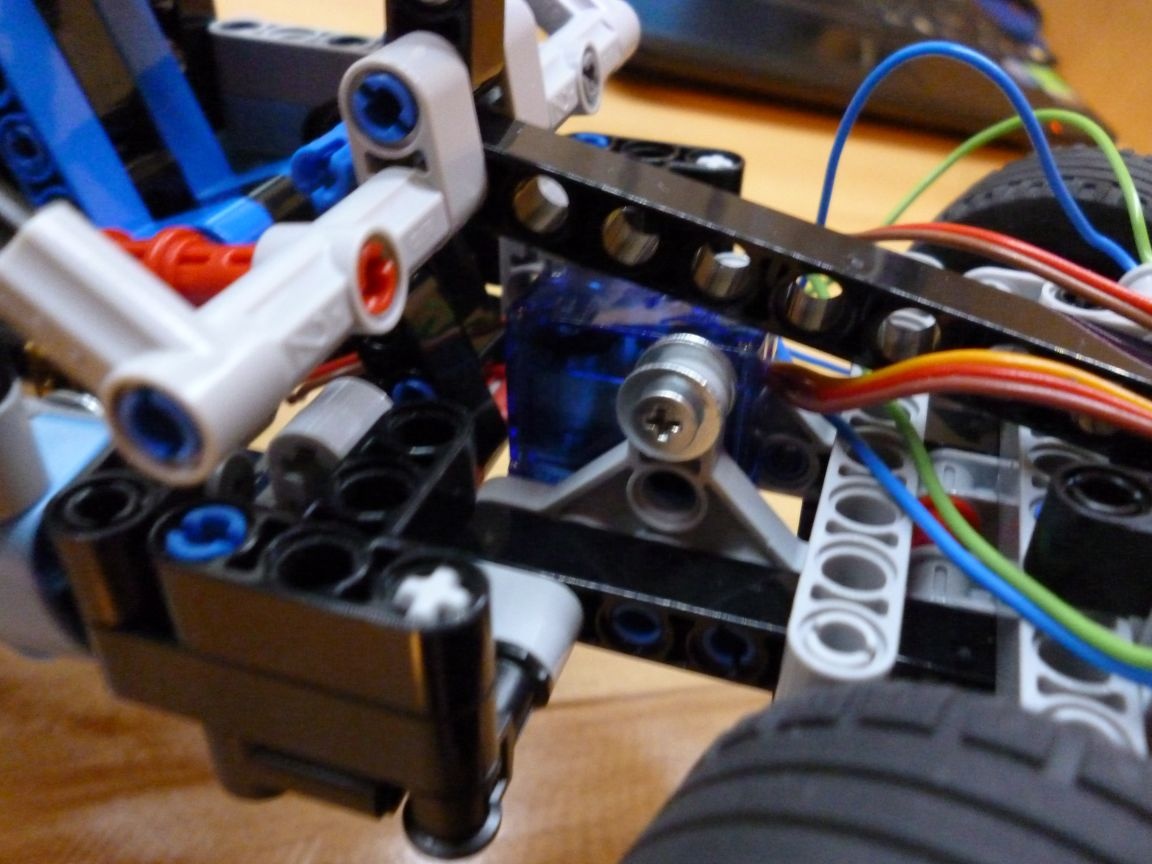
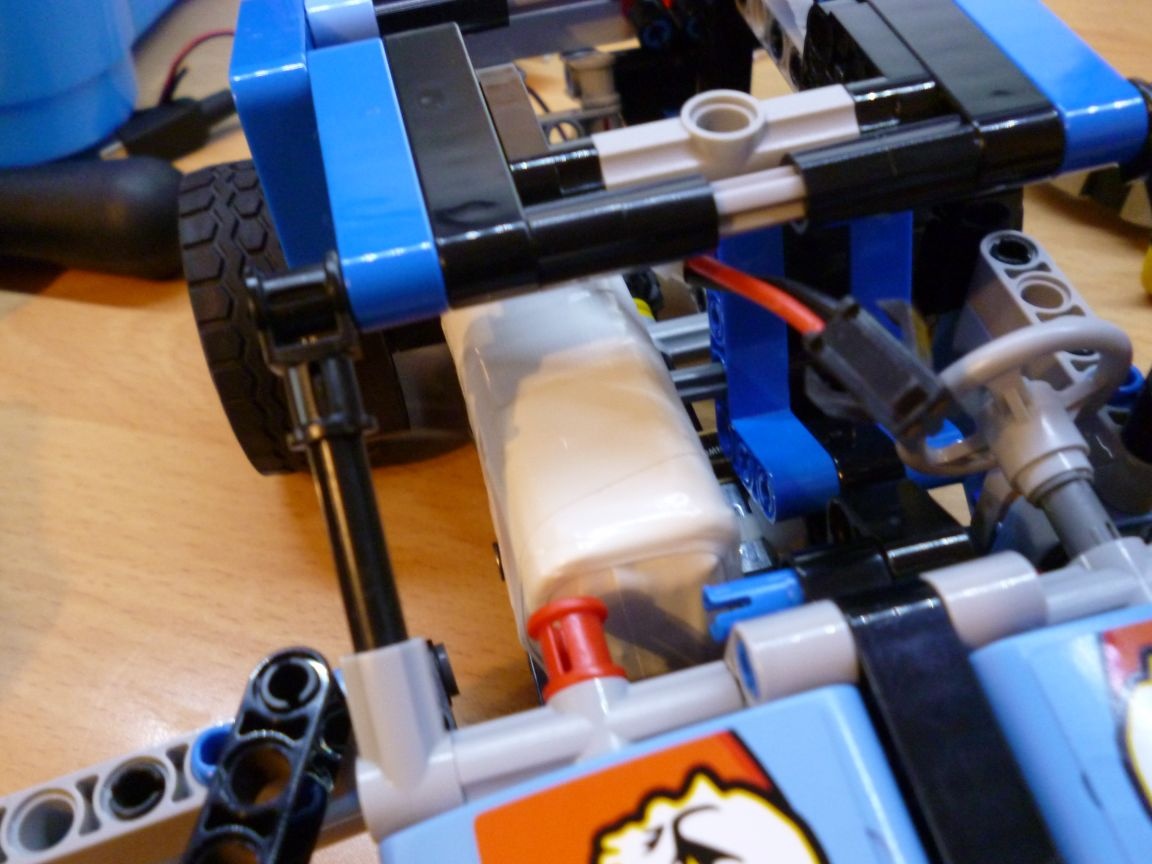
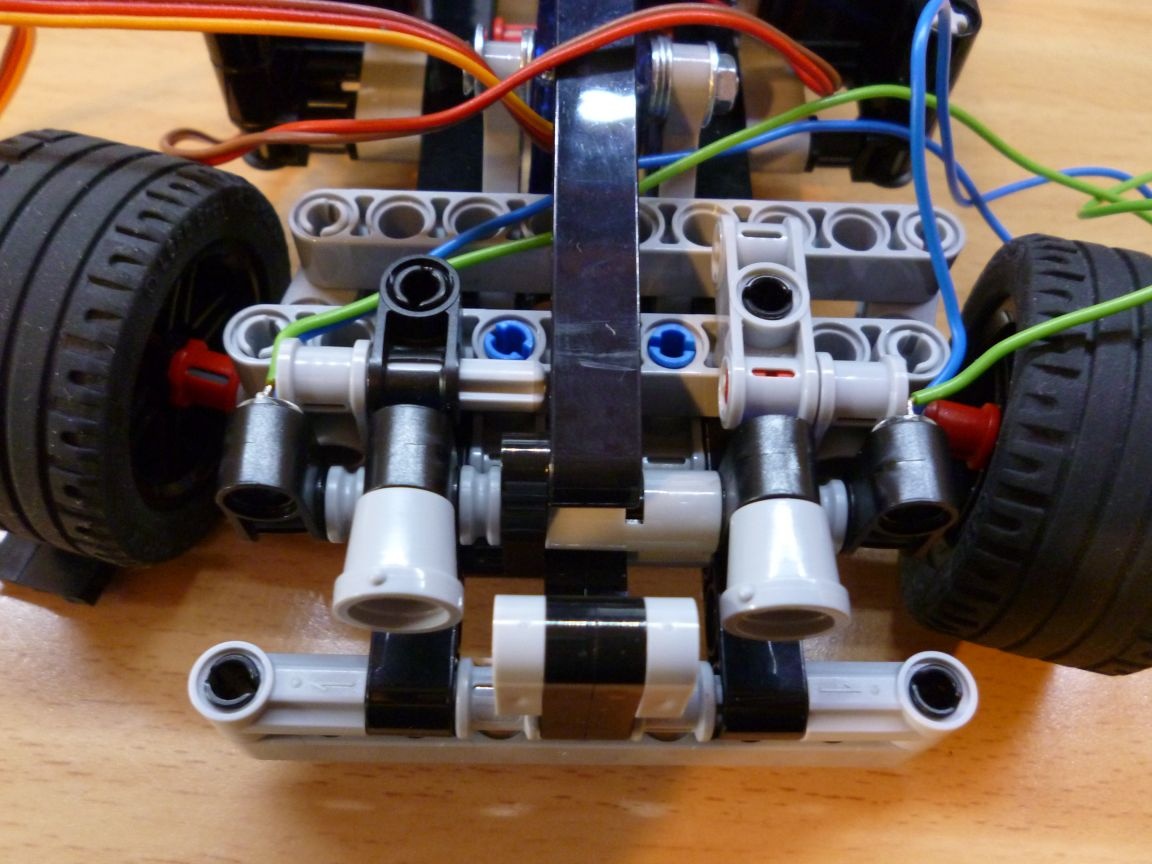
Sett i gang vår modellen det vil være en girmotor med en hastighet på 200 o / min. Kan brukes med et annet girforhold. Men etter min mening er dette det beste alternativet. Ved 100 o / min - for sakte, 300 o / min - er det ikke nok kraft og motoren er veldig varm. Ta på "Legovskaya" tilkoblingshylsen på akselen til girmotoren og fest den mot å vri fyrstikken med en trim. For å fikse motoren vår på modellen, er det nødvendig å bøye delen fra metallkonstruktoren med bokstaven “P” og feste girmotoren til platen med en klemme. Resultatet skal være følgende:
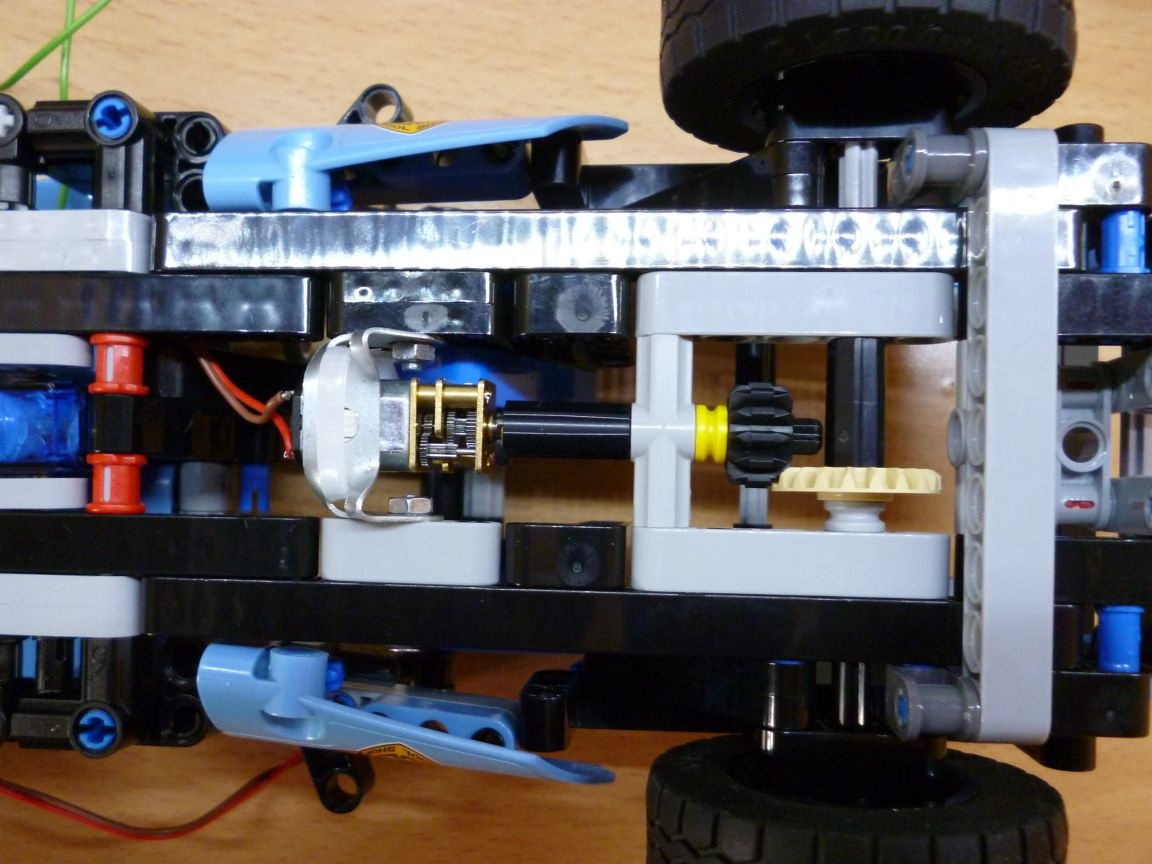
Ved hjelp av 3x20 bolter fester vi motoren til modellen. Ikke stram for mye! Ellers kan du skade deler av Lego-konstruktøren. På modellen ser det slik ut:
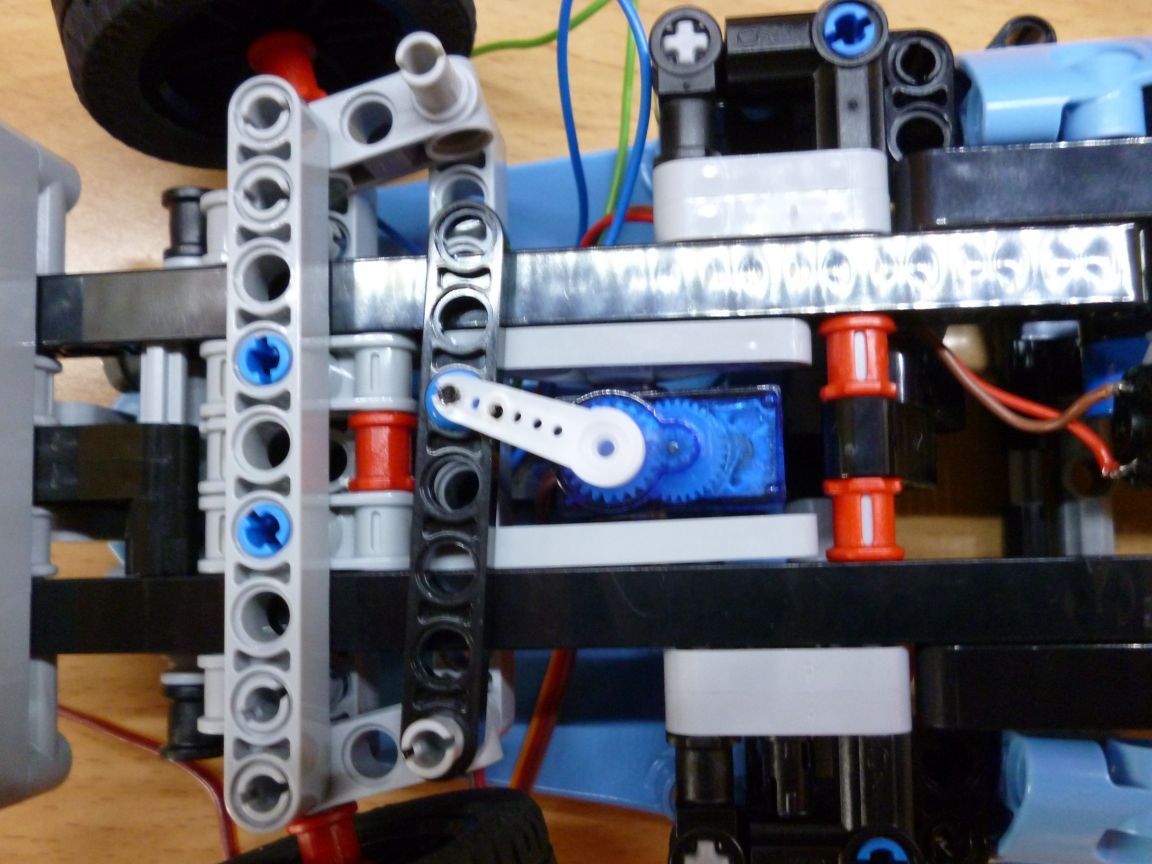
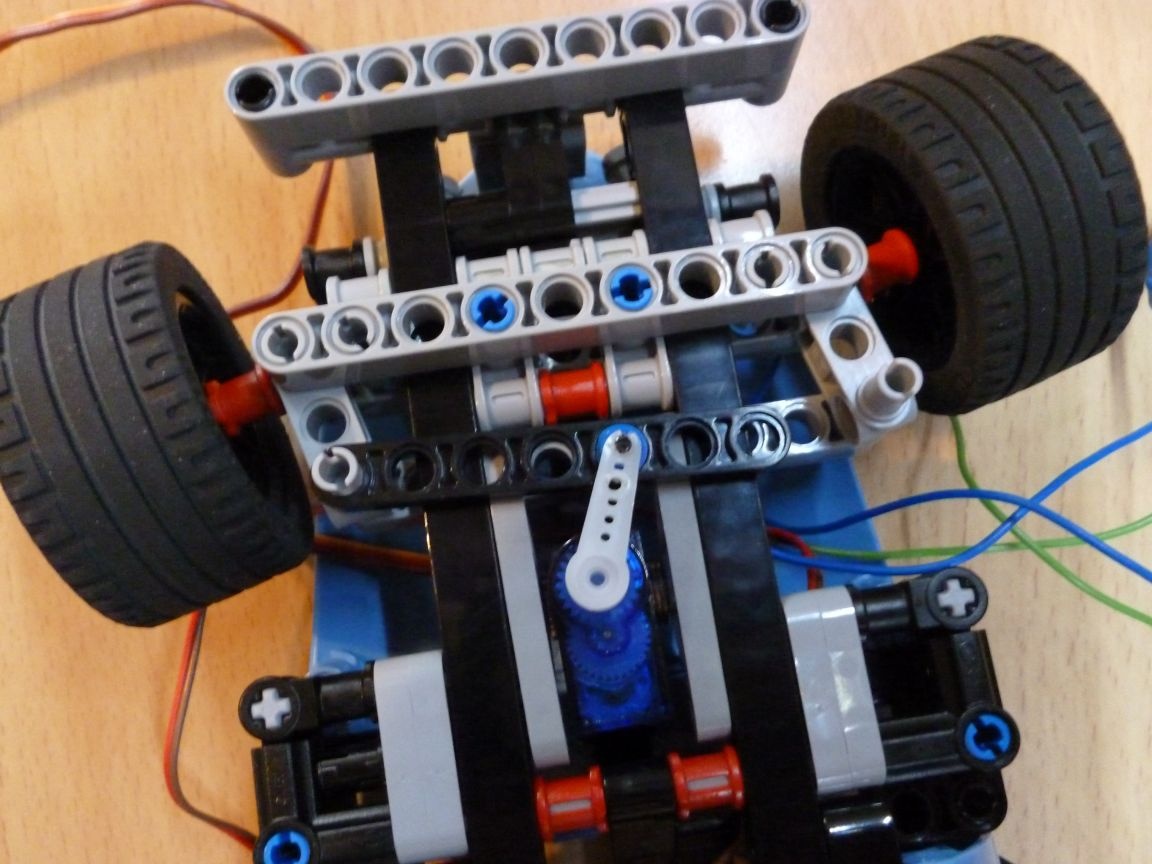
Ta en lett modifisert servo SG-90 for å ta svingen. Saken må bores nøye for ikke å berøre de indre delene, det gjennomgående hullet med en diameter på 3,2 mm eller bare kuttes med en skrivesnor.

Vi setter inn en bolt i hullet som er laget, og på kantene legger vi på trekantede plater og fikser med muttere. Vi setter spaken på servo akselen og fest delen til Lego spaken. På en skrivemaskin ser det slik ut:
Trinn 3 er en elektriker.
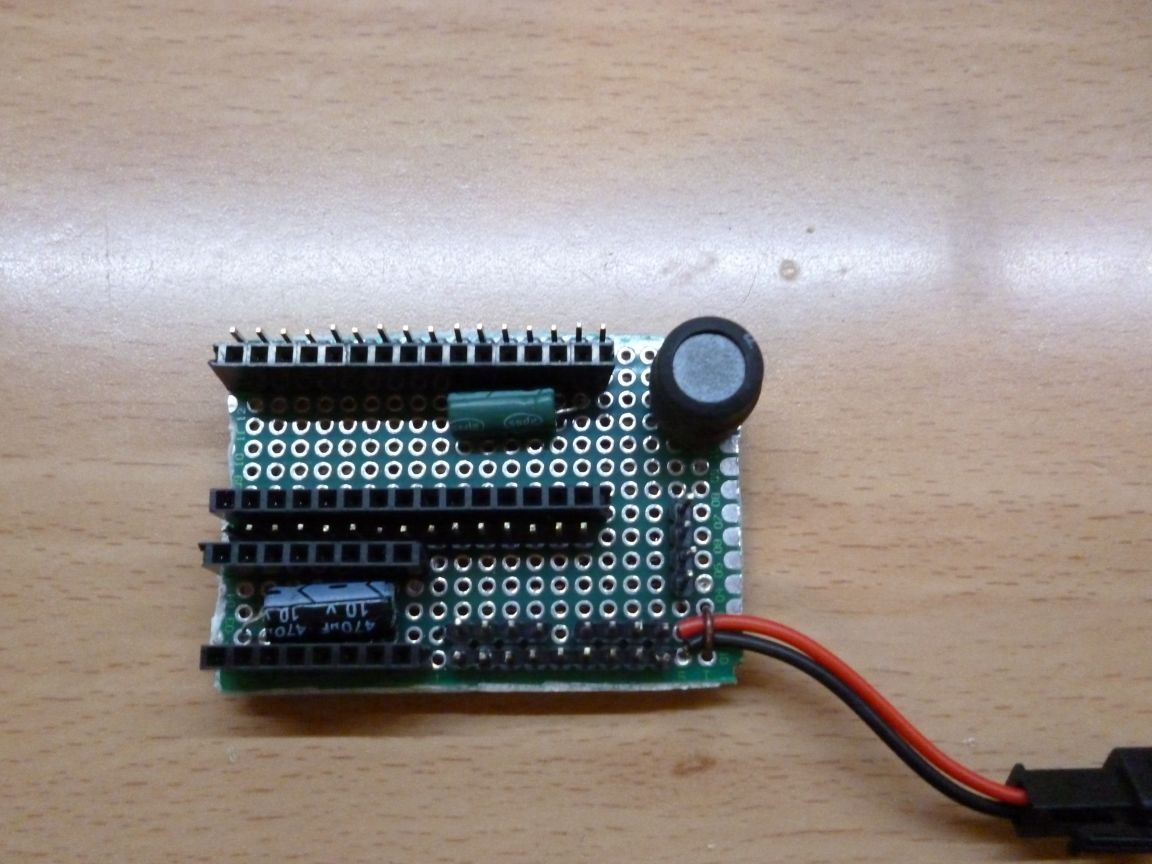
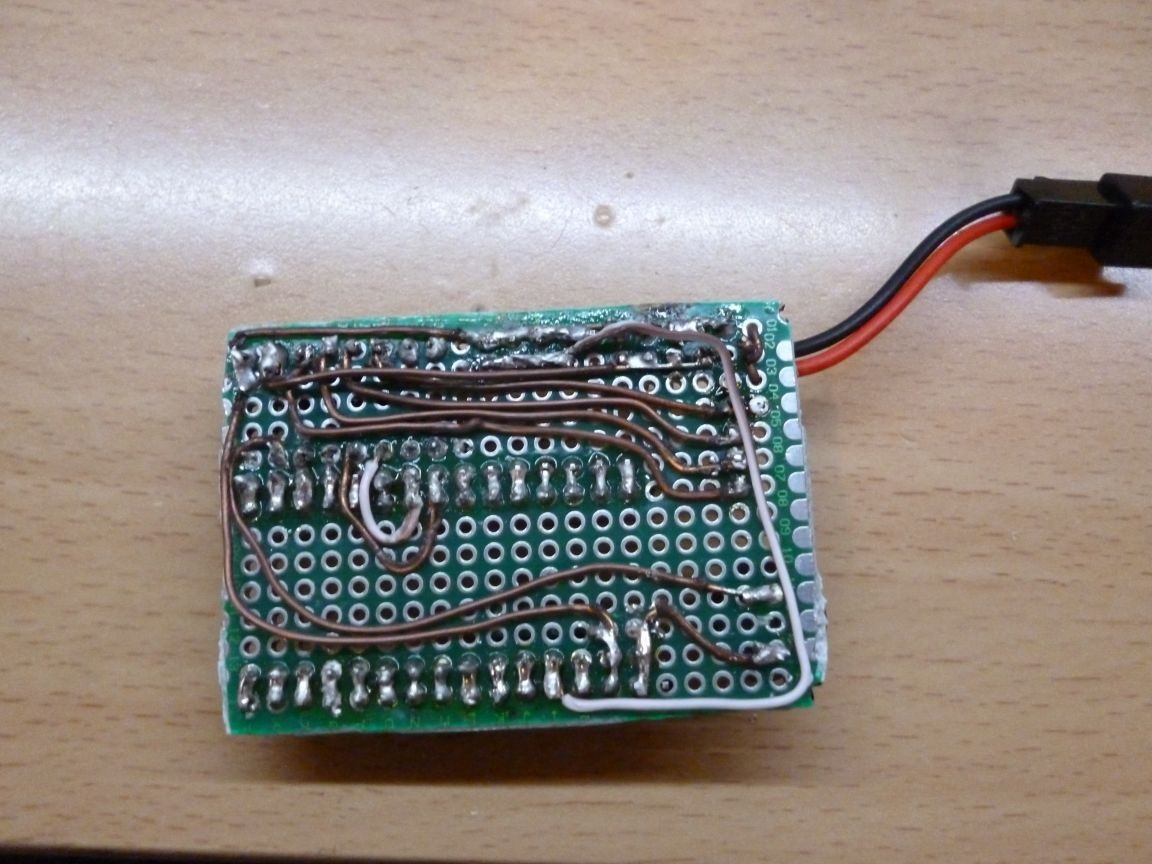
Loddejern i hånden og gå. All elektronikk kan settes sammen bare ved å koble til monteringsledningene. Men dette er upraktisk, da det krever mye plass. I tillegg er det stor sannsynlighet for kontakt av dårlig kvalitet. Derfor er det bedre å lodde alt på kretskortet i henhold til følgende skjema:
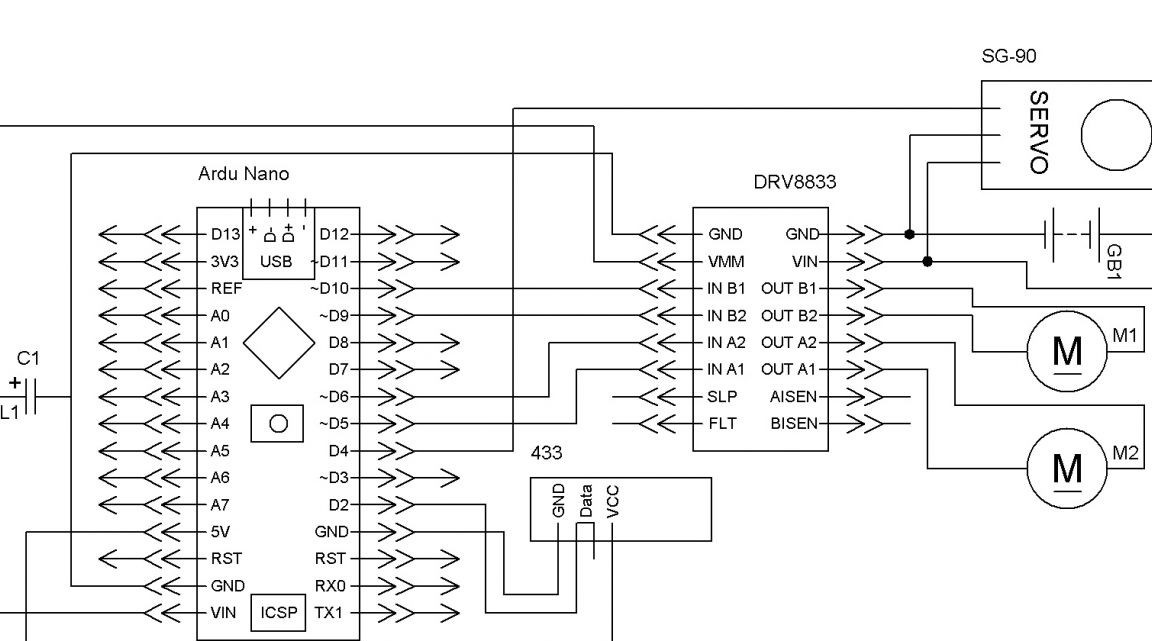
Jeg vil bringe litt klarhet: du kan ta hvilken som helst laveffektkondensator, du kan også finne en induktor av noe slag, dette er nødvendig for å stabilisere spenningen til mikrokontrolleren. Antennen må loddes til mottakeren. Jeg fikk følgende:
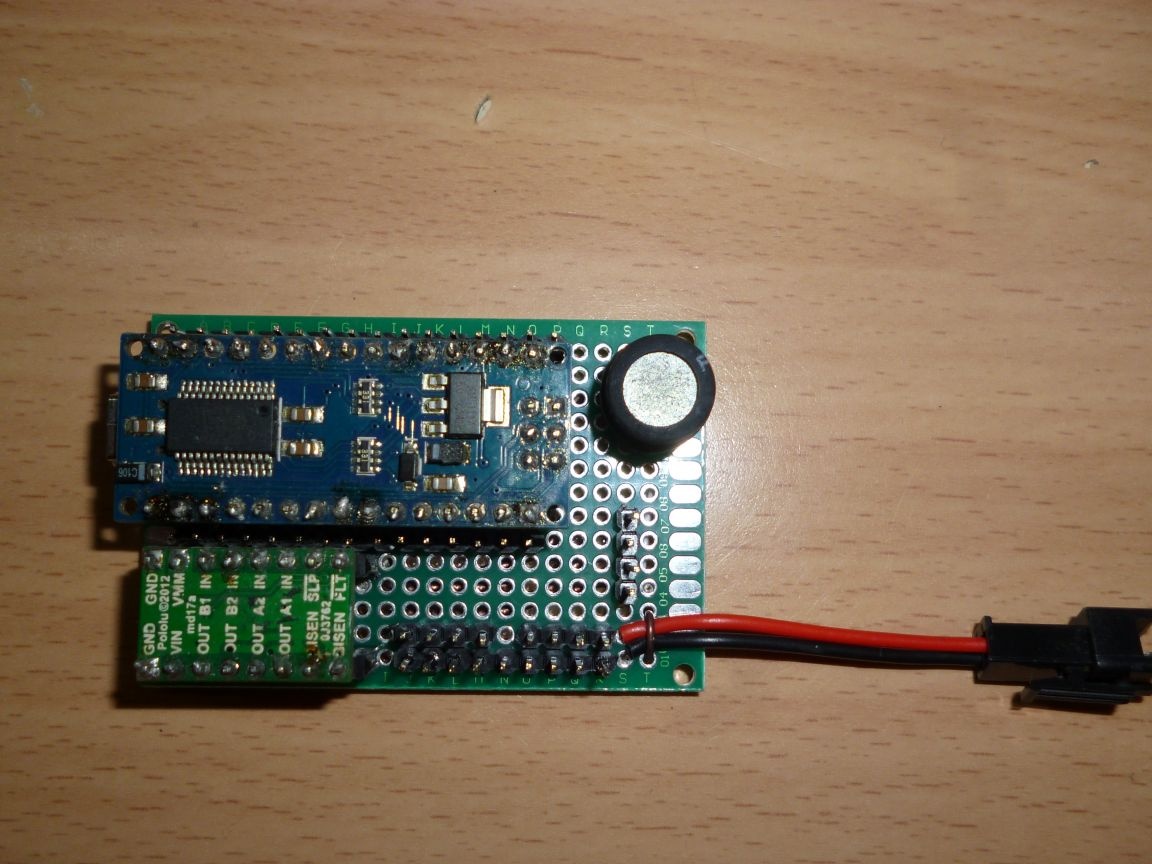
Vi plasserer Arduino Nano og DRV 8833 på deres steder:
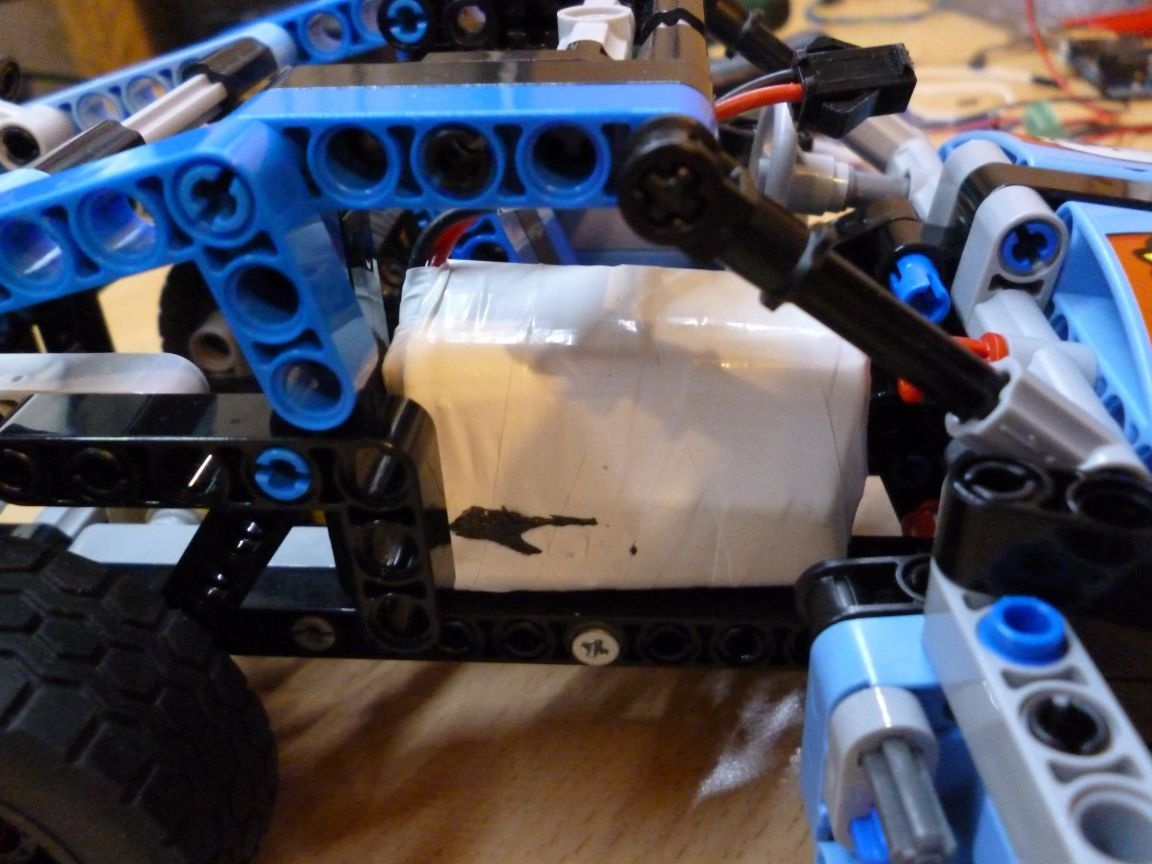
For strøm vil vi bruke 6 Ni-Mn 1.2v 1000mA-batterier, loddede i serie og viklet med elektrisk tape. Lim dem på et dobbeltsidig klebende passasjersete.

Vi kobler alt i henhold til ordningen og installerer på baksiden av maskinen. Du kan også legge til et par lysdioder. Sett dem i frontlyktene og koble til pinne 14 (A2).
Trinn 4 firmware.
For å skrive firmware, brukte jeg Arduino IDE. Den gjeldende versjonen i skrivende stund er 1.8.1. Det er praktisk å implementere kommunikasjonsprotokollen ved å bruke 433 MHz-modulen ved å bruke rc-switch-2.52-biblioteket. Du må laste ned den og legge den til "biblioteker" -mappen på Arduino IDE.
Vi kobler Arduino og blitz den med følgende firmware:
For å teste ytelsen til modellen vår, trenger vi et annet Arduino-brett. Det er nødvendig å koble en 433 MHz radiosender til det andre kortet. Senderen er tilkoblet som følger:
VCC (sender) til 5+ (Arduino),
GND til GND,
DATA til D10.
Skriv den modifiserte SendDemo-skissen der. Det er i eksemplene på biblioteket vi installerte, og tjener til å sende kommandoer. Før du blinker skissen, må du endre den litt, nemlig endre de overførte kommandoene. Avhengig av hva du trenger å sjekke, skriver du følgende kommandoer til sendelinjen:
“1” - fremoverbevegelse (skriv en kommando uten anførselstegn!)
"2" - bakoverbevegelse
“15” - full stopp
"3" - vri rattet til venstre
"4" - vri rattet til høyre
"5" - sett rattet i midten
"10" - slå på frontlyktene
"11" - slå av frontlyktene
Å lage en fjernkontroll med en 433 MHz radiosender er et tema for en egen artikkel. Jeg vil definitivt skrive instruksjonene for fremstilling av en slik fjernkontroll.
Jeg vil si at dette alternativet passer for nesten alle modeller av Lego-biler. Det er nok å koble sammen all mekanikk og finne et sted for brettet. Og hvis du inkluderer fantasy, kan du mekanisere hvilken som helst modell.