


La oss først forstå forskjellen mellom octocopter og quadcopter. I tillegg til navnet er dette også antall motorer på skinnene. dvs. quadrocopter - fire motorer, octocopter - åtte. Dette gjelder også for heksakopteret - seks, trikopter - tre osv. Hvis guidene, for eksempel, er fire (X) og åtte motorer, er dette fremdeles et oktokopter, men betegnes som X8. dvs. på fire skinner, åtte motorer.
I utgangspunktet er nummer med et prefiks for koptere fly som styres av operatørens radiosignal fra bakken. En student fra India bestemte seg for å gå lenger og lage et oktokopter som var i stand til å heve en person opp i luften. Dette er ikke et billig prosjekt. Finansieringen ble overtatt av utdanningsinstitusjonen.
Verktøy og materialer:
- Motorer Turnigy CA170 Motorer - 8 stk;
- Kontroller Turnigy Fatboy 300A - 4 stk;
- Turnigy 200A HV-kontroller - 4 stk;
- Sender Hitech XG11 Tx / Rx;
-Flight DJI A3 Pro-kontroller;
-Flight-kontroller DJI Naza M V2;
- Batteri Zippy 22.2V 5Ah 40C LiPo - 16 stk;
- Charger 6s LiPo Charger;
-XT150 kontakter - 50 stk;
-Wire 8AWG Sillicone Wire - 10 meter;
-Servoprivody;
-Ball for å spille squash (Squash Balls) - 4 stk;
- MDF-ark 25cm x 50cm x 2mm;
-Drel;
- Vinkelsliper;
- Skrutrekkere;
- Skiftenøkler;
- Tenger;
-Laser kutter eller båndsag;
-Sortiment av muttere 4mm, 6mm og 8mm, bolter og skiver;
-Gorelka;
-LED LED;
Lodding tilbehør;
- 2 og 3 mm ståltråd;
-Telrep skrue 100mm-200mm - 40 stk;
- 40 kroker og øyebolter;
-Tachometer Turnigy RPM;
-Kraftanalysator (Turnigy Wattmeter / Ampmeter);
-Batterikontroller;
- Aluminiumsprofilrør;
-Aluminum plate;
- Dobbeltsidig tape;
-Sveisemaskin;
-Ruletka;
-Computer with Fusion 360;
- Batteri 11,1 V 2200 mAh LiPo 30C;
-Tett stoff 1,2m x 1,2m;
- Sterk tråd og nål;
-Sikkerhetsbelte;
Trinn en: Design
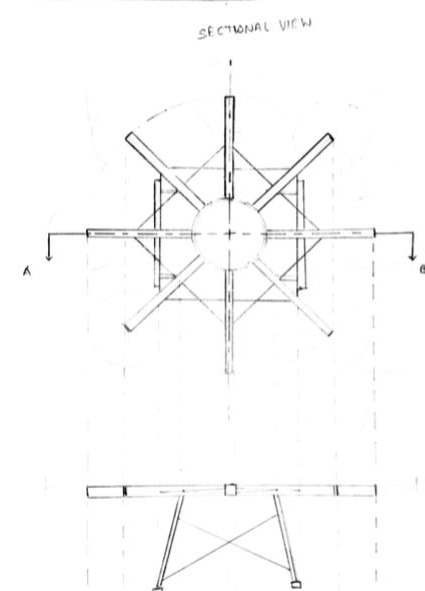
Ved utvikling av et bemannet octocopter vurderte mesteren forskjellige konfigurasjonsalternativer, og X8 og H, og T, men kom til den konklusjon at det mest optimale av forskjellige grunner ville være utformingen av octocopter, i henhold til det tradisjonelle opplegget.
Da var det nødvendig å finne ut hva størrelsen på oktokopteret skulle være. Beregningene ble gjort med CAD-modeller på Fusion 360 som eksempel.De eksisterende skruene ble tatt med i beregningene. Det optimale viste seg å være en diameter på tre meter, en høyde på en meter. Indre kurv, for en person 55x55 cm.

Trinn to: Handlekurv
Rammen ble sveiset fra en firkantet aluminiumprofil med en hylle på 50 mm og en veggtykkelse på 2 mm.
Profilen ble kuttet og sveiset. Sømmene rengjøres.



Trinn tre: Montering av plater
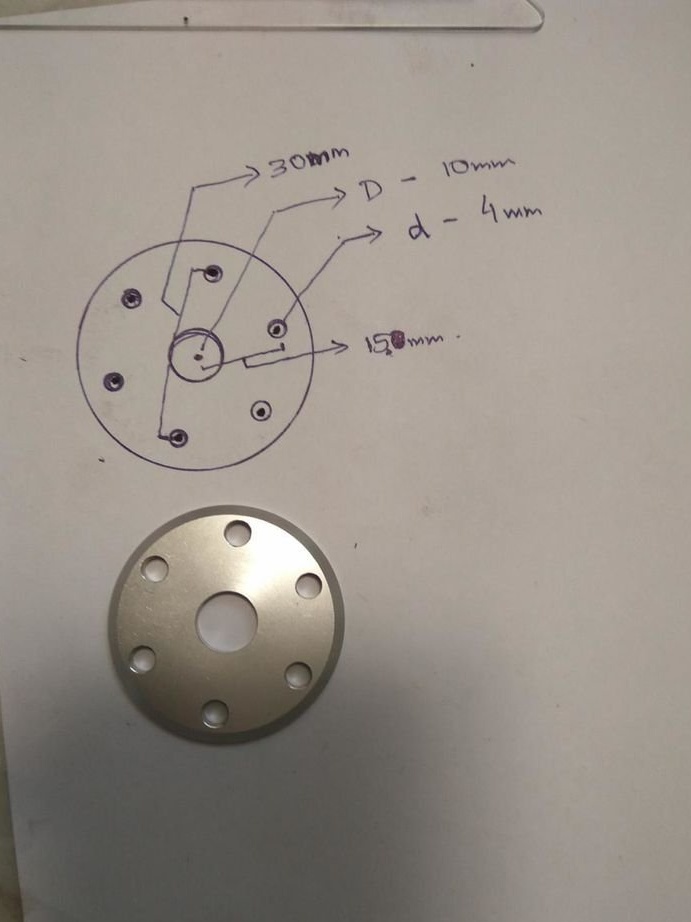
For braketter brukte mesteren aluminiumsplater på 1,5 mm. Det er åtte braketter totalt, fire i hjørnene og fire i midten av rammen. Lengden på armskulderen og den bærende delen er 15 cm hver. Beslagene er designet i Fusion 360. Platene ble kuttet med en fresekutter. Det bores monteringshull i dem. Deretter ble brakettene sveiset til rammen.

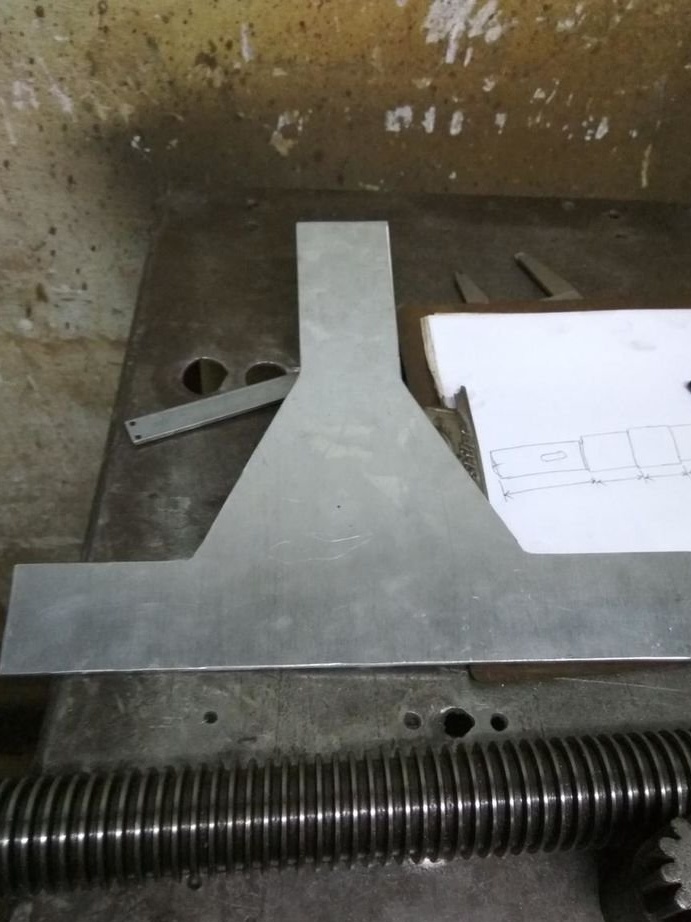





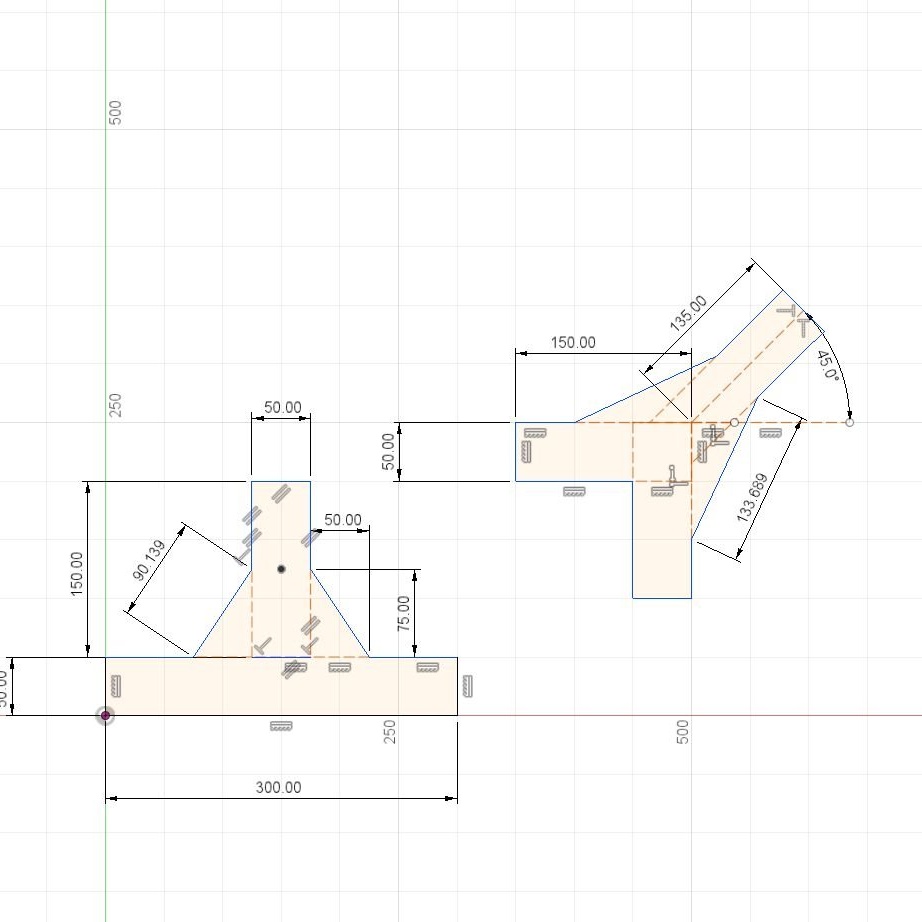
Trinn fire: Carrier-profil
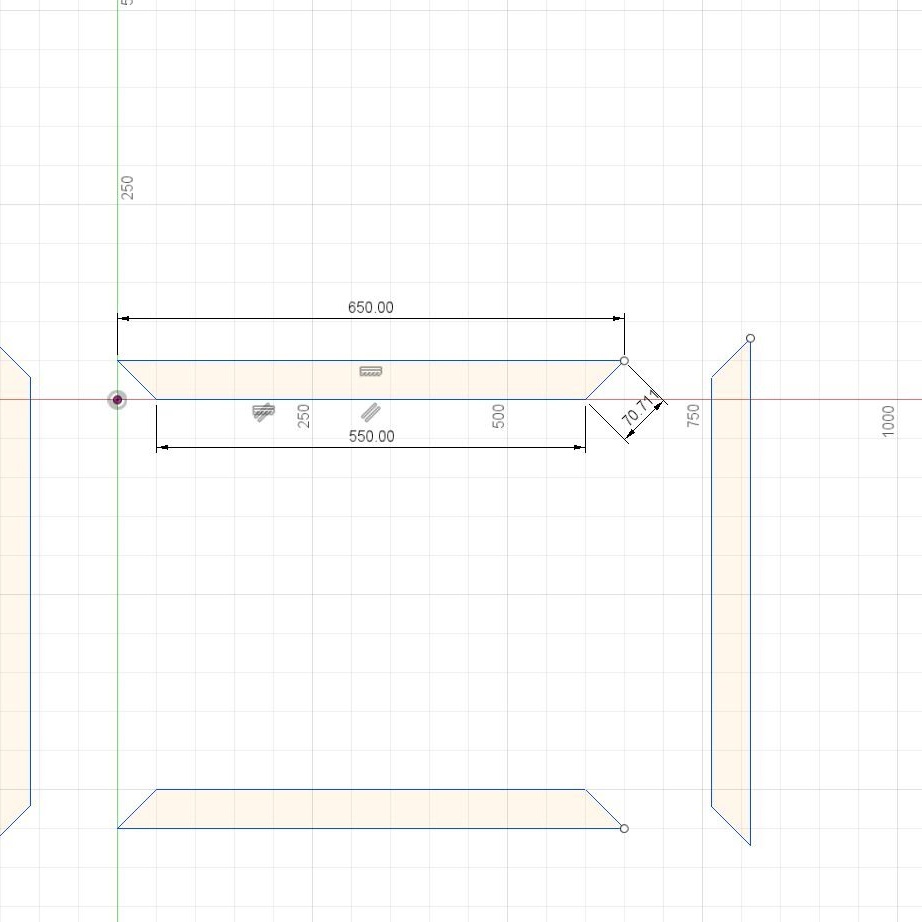
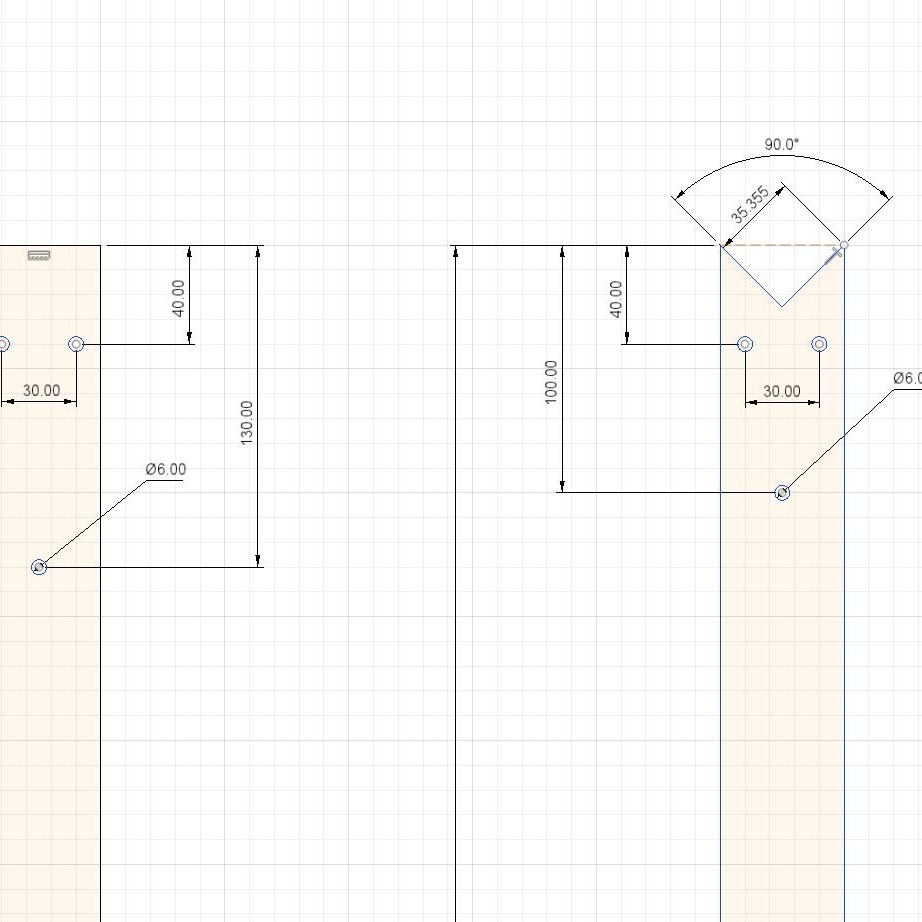
Disse profilene er festet til konsollene, og motorene er installert i endene. Profilene er firkantede, 50 x 50 cm, og har forskjellige lengder. Profiler 112,5 cm lange er festet i hjørnene, 125 cm i profil på sidene. En utskjæring er laget i kantede profiler i en vinkel på 45 grader. Det er nødvendig at endeflaten er i tilknytning til vinkelplanet.
For å feste profilene til konsollene, borer masteren hull for boltene.




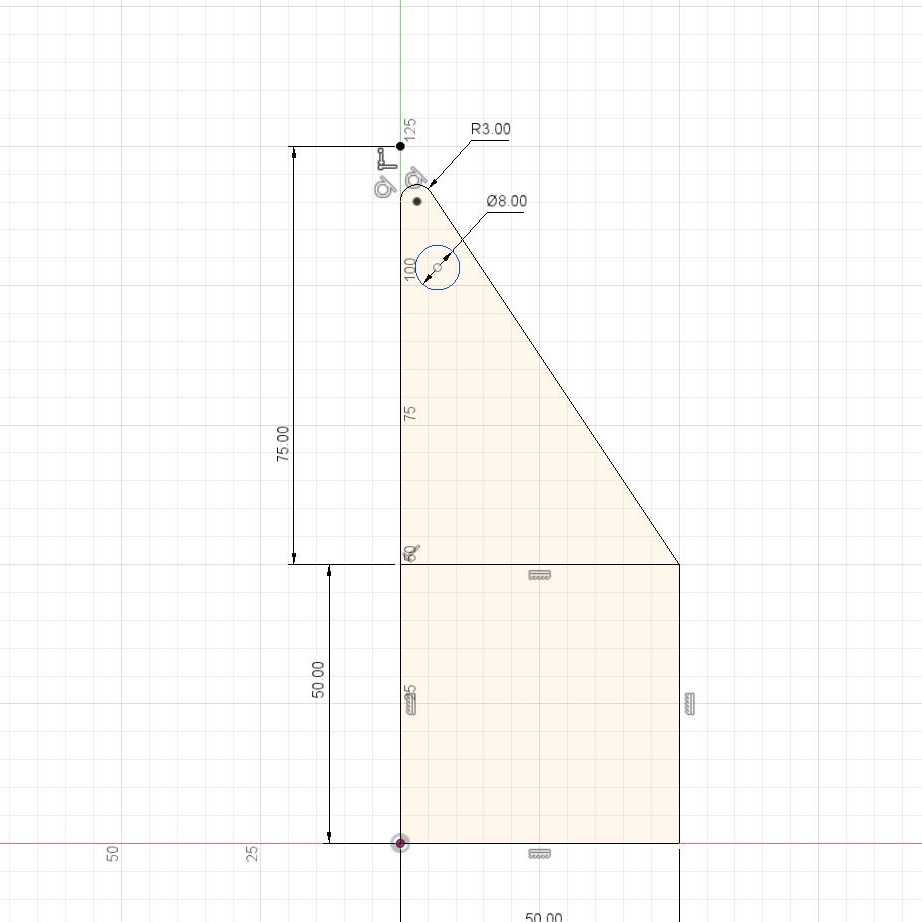
Trinn fem: Motormontering
Motorer skrus fast på en firkantet aluminiumsplate. Fra bunnen av platen, parallelt med hverandre, er det skrudd to hjørner. Avstanden mellom dem er lik bredden på profilen. Videre er platen med motoren montert på profilen, monteringshullene blir boret og alt er vridd med bolter.





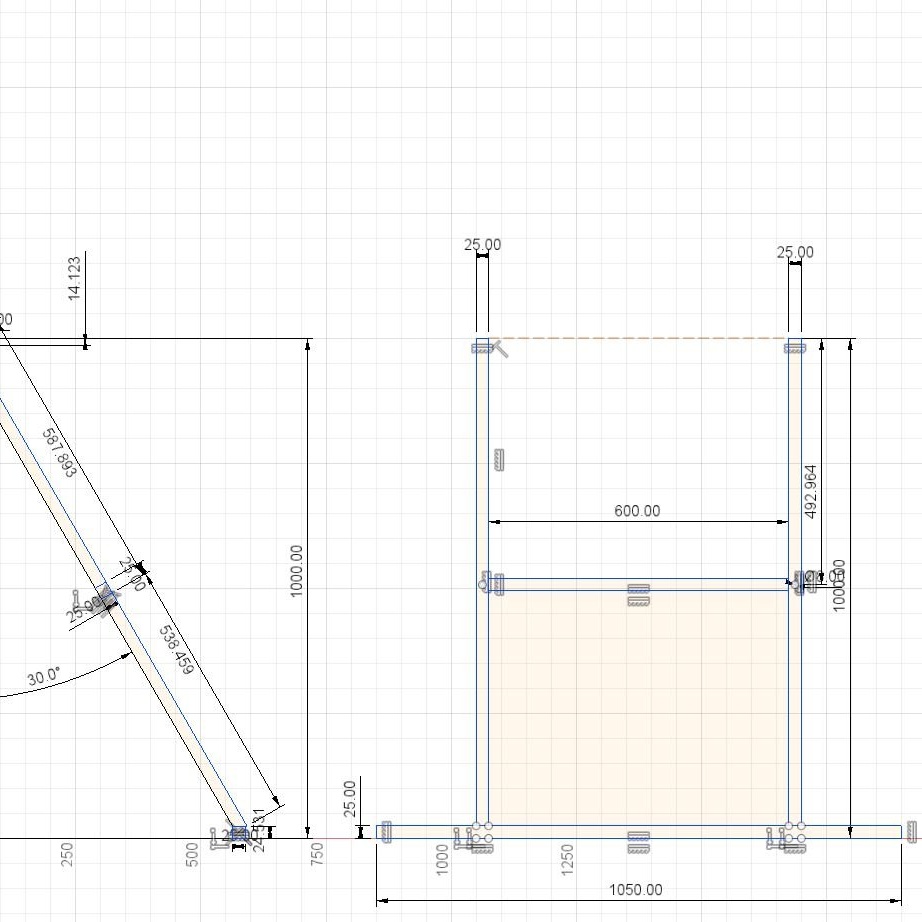
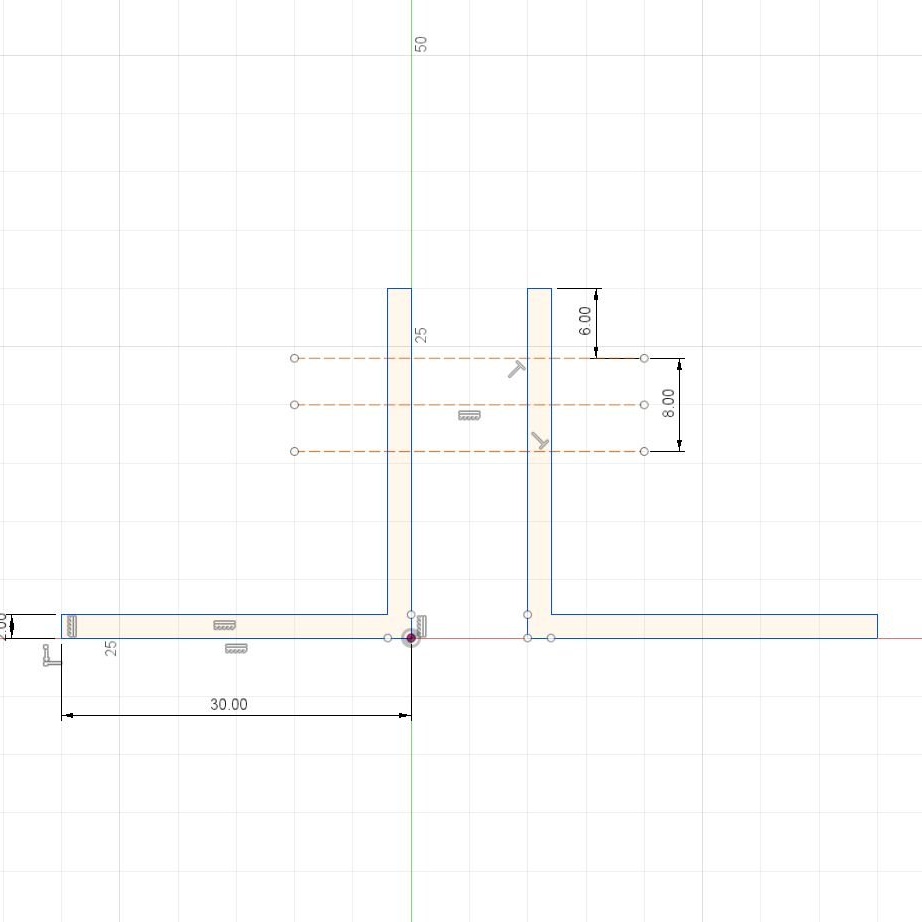
Trinn seks: Chassis
Chassiset var laget av aluminiumsprofiler 25 x 25 mm og en tykkelse på 3 mm. Alle delene var sveiset, og størrelsene deres kan sees på bildet. Tanken var å montere chassiset ut av kurven i en vinkel på 30 grader. For å forhindre skade på chassiset trekkes støttekabler mellom seg.


Trinn syv: Støtte støtteprofiler
Etter montering av motorene begynte støtteprofilene å bøye seg. Da prøvde mesteren å starte motoren, og fant ut at profilene "går". Det var nødvendig å styrke designet.
Å legge plater ville lagt for mye vekt på strukturen. Så bestemte mesteren seg for å lage et V-formet design fra kurven og ned. Tau er festet til den nedre delen. De andre endene av kablene er festet til konsollene i midten av støtteprofilene. Kabler dras med en heise. Dermed blir strukturen stiv.















Trinn åtte: Koble til
Først selger mesteren kontaktene til endene av ledningene.


Deretter begynner installasjonen. Hver motor måtte sjekkes for rotasjonsretning. Om nødvendig er det enkelt å endre rotasjonsretningen til motoren, og følgelig skruen, og bytte to av de tre ledningene som kommer fra ESC til motoren. Etter at alle motorene var riktig tilkoblet, foretok veiviseren installasjonen i henhold til tilkoblingsskjema fra produsenten.
Flykontrollere IMU DJI A3 er veldig følsomme for interferens fra metaller, og masteren kunne ikke konfigurere systemet på grunn av interferens. Som et resultat erstattet mesteren A3 med Naza M V2, som hadde en lignende tilkoblingsplan. Naza M V2 fungerte veldig pålitelig.
Deretter kobler veiviseren batteriene. På hver bæreprofil er to 22,2 V-batterier koblet i serie.



Trinn ni: Pilotsete
Setet var sydd av slitesterkt stoff. Et sikkerhetsbelte er også festet til piloten, som er festet til rammen, og en hjelm.






Trinn ti: Første flytur
Før pilotens flytur på oktokopteret ble flere tester utført med en sandbag, og deretter med en modell av en person. Under flyturen ble forskjellige situasjoner simulert fra tap av kontroll til et vindkast.
Etter alle testene fløy piloten til slutt i lufta.






Før du flyr, må du utføre følgende handlinger.
Kontroller tettheten til bolter, kabler, motormontering.
Sjekk ledningene.
Kontroller at skruene enkelt roterer.
Forsikre deg om at alle ESC-er er av.
Forsikre deg om at alle batteriene er ordentlig festet og ladet.
Koble strøm til flykontrollen for initialisering og kalibrering.
Etter tilkobling til GPS vil den bytte til helautomatisk modus (Alt. + Att. Hold).
Sitt i pilotsetet og spenn deg opp.
Koble alle batteriene til ESC.
Koble de to batteriene i serie (ESC-RB-RB-ESC) ved å bruke en motstand for å eliminere gnisten.
Slå på motorene ved å vri bryteren til på-stilling.
Bruk kontrolleren til å kontrollere octocopter.